1. 前文
先說SLG是什么,SLG=Simulation Game,策略類游戲,現特指回合制策略游戲以及即時SLG,有別于SIM(Simulation)類“生活“模擬游戲,SLG雖然也是縮寫的simulation(模擬但與經營類意思不同),卻是“戰爭策略“模擬游戲的總稱,
而本文要說的是SLG游戲中的一種分類,國產手游中比較具有代表性的有:率土之濱、三國志戰略版、宏圖之下,由于我們是要介紹A*演算法相關內容,所以我們貼幾張關于戰場的圖,以方便我們有一個理解,
以下三個游戲由發行時間先后順序展示:
-
率土之濱

-
三國志戰略版

- 鴻圖之下

那么有上述三個游戲,其沙盤布局如下:
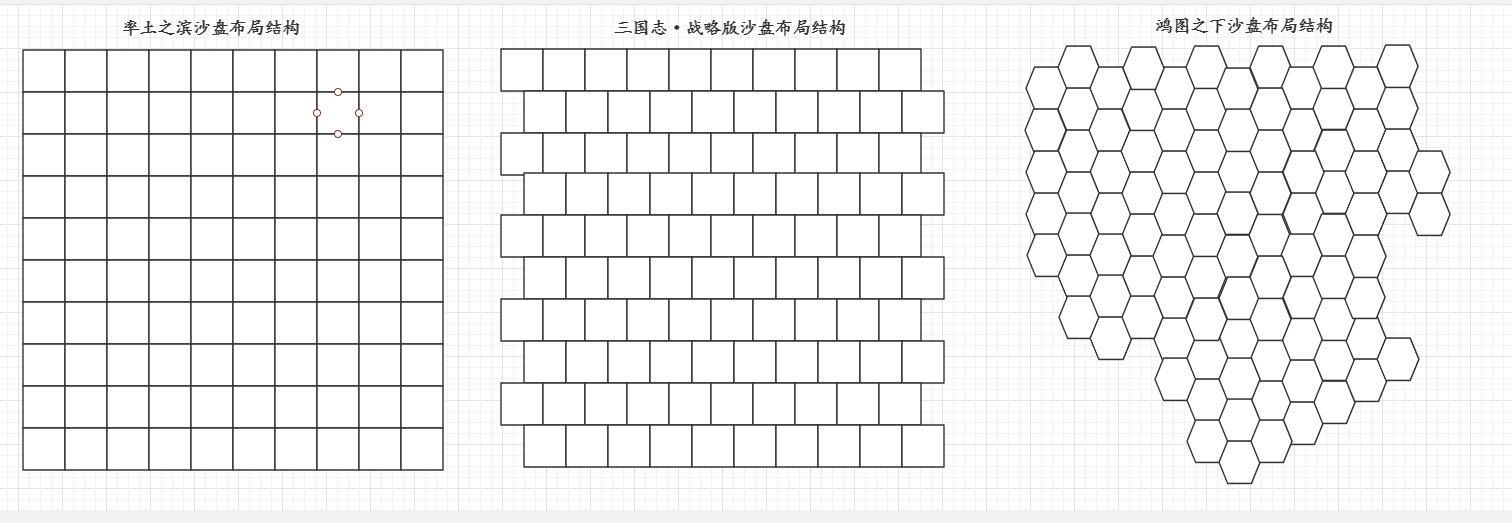
傳統的A*演算法就是用率土之濱的資料結構,而隨著沙盤游戲的不斷發展地圖的嵌入方式發生了變化,三國志戰略版錯開了50%,鴻圖之下則采用正六邊形的方式展示,
2. 演示代碼準備
以下使用C#+WPF,VS2019進行的代碼演示,
3. 深度優先和廣度優先
深度優先遍歷(Depth First Search, 簡稱 DFS) 與廣度優先遍歷(Breath First Search)是圖論中兩種非常重要的演算法,生產上廣泛用于拓撲排序,尋路(走迷宮),搜索引擎,爬蟲等,也頻繁出現在 leetcode,高頻面試題中,
3.1 深度優先
/// <summary>
/// 深度優先
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void btnDFS_Click(object sender,RoutedEventArgs e)
{
dicCache = new Dictionary<string, bool>();
Tuple<int, int> pStartIndex = pStartShapeSquare.Tag as Tuple<int, int>;
DFS_WayFinding(pStartIndex.Item1, pStartIndex.Item2);
}
private bool DFS_WayFinding(int index1, int index2)
{
if (index1 < 0 || index1 >= CrosswiseNodeCount)
{
return false;
}
if (index2 < 0 || index2 >= LengthwaysNodeCount)
{
return false;
}
string strTag = $"{index1},{index2}";
if (dicCache.ContainsKey(strTag))
{
return false;
}
else
{
dicCache.Add(strTag,true);
}
ShapeSquare shapeSquare = PlotShapeSquare[index1, index2];
if (shapeSquare is ShapeSquare_BlockingPoint)
{
return false;
}
else if (shapeSquare == pEndShapeSquare)
{
return true;
}
shapeSquare.Fill = Brushes.BurlyWood;
Thread.Sleep(10);
System.Windows.Forms.Application.DoEvents();
if (DFS_WayFinding(index1 - 1, index2))
{
return true;
}
else if (DFS_WayFinding(index1, index2 - 1))
{
return true;
}
else if (DFS_WayFinding(index1 + 1, index2))
{
return true;
}
else if (DFS_WayFinding(index1, index2 + 1))
{
return true;
}
return false;
}
3.2 廣度優先
private void btnBFS_Click(object sender, RoutedEventArgs e)
{
dicCache = new Dictionary<string, bool>();
Tuple<int, int> pStartIndex = pStartShapeSquare.Tag as Tuple<int, int>;
BFS_WayFinding(pStartIndex);
}
/// <summary>
/// 廣度優先
/// </summary>
/// <param name=""></param>
/// <returns></returns>
private bool BFS_WayFinding(Tuple<int, int> pIndex)
{
Queue<Tuple<int, int>> BFSQueue = new Queue<Tuple<int, int>>();
BFSQueue.Enqueue(pIndex);
string strTag = $"{pIndex.Item1},{pIndex.Item2}";
dicCache.Add(strTag, true);
while (BFSQueue.Count!=0)
{
Tuple<int, int> pShapeSquareIndex= BFSQueue.Dequeue();
ShapeSquare shapeSquare = PlotShapeSquare[pShapeSquareIndex.Item1, pShapeSquareIndex.Item2];
if (shapeSquare == pEndShapeSquare)
{
return true;
}
shapeSquare.Fill = Brushes.BurlyWood;
Thread.Sleep(10);
System.Windows.Forms.Application.DoEvents();
if (IsRange(pShapeSquareIndex.Item1-1, pShapeSquareIndex.Item2))
{
BFSQueue.Enqueue(new Tuple<int, int>(pShapeSquareIndex.Item1 - 1, pShapeSquareIndex.Item2));
}
if (IsRange(pShapeSquareIndex.Item1 , pShapeSquareIndex.Item2 - 1))
{
BFSQueue.Enqueue(new Tuple<int, int>(pShapeSquareIndex.Item1, pShapeSquareIndex.Item2 - 1));
}
if (IsRange(pShapeSquareIndex.Item1 + 1, pShapeSquareIndex.Item2))
{
BFSQueue.Enqueue(new Tuple<int, int>(pShapeSquareIndex.Item1 + 1, pShapeSquareIndex.Item2));
}
if (IsRange(pShapeSquareIndex.Item1 , pShapeSquareIndex.Item2 + 1))
{
BFSQueue.Enqueue(new Tuple<int, int>(pShapeSquareIndex.Item1, pShapeSquareIndex.Item2 + 1));
}
}
return false;
}
private bool IsRange(int index1, int index2)
{
if (index1 < 0 || index1 >= CrosswiseNodeCount)
{
return false;
}
if (index2 < 0 || index2 >= LengthwaysNodeCount)
{
return false;
}
ShapeSquare shapeSquare = PlotShapeSquare[index1, index2];
if (shapeSquare is ShapeSquare_BlockingPoint)
{
return false;
}
string strTag = $"{index1},{index2}";
if (dicCache.ContainsKey(strTag))
{
return false;
}
else
{
dicCache.Add(strTag, true);
}
return true;
}
3.3 特點
如果深搜是一個人,那么他的性格一定倔得像頭牛!他從一點出發去旅游,只朝著一個方向走,除非路斷了,他絕不改變方向!除非四個方向全都不通或遇到終點,他絕不后退一步!因此,他的姐姐廣搜總是嘲笑他,說他是個一根筋、不撞南墻不回頭的家伙,
深搜很討厭他姐姐的嘲笑,但又不想跟自己的親姐姐鬧矛盾,于是他決定給姐姐講述自己旅途中的經歷,來改善姐姐對他的看法,他成功了,而且只講了一次,從那以后他姐姐不僅再沒有嘲笑過他,而且連看他的眼神都充滿了贊賞,他以為是自己路上的各種英勇征服了姐姐,但他不知道,其實另有原因……
深搜是這樣跟姐姐講的:關于旅行呢,我并不把目的地的風光放在第一位,而是更注重于沿路的風景,所以我不會去追求最短路,而是把所有能通向終點的路都走一遍,可是我并不知道往哪走能到達目的地,于是我只能每到一個地方,就向當地的人請教各個方向的道路情況,為了避免重復向別人問同一個方向,我就給自己規定:先問北,如果有路,那就往北走,到達下一個地方的時候就在執行此規定,如果往北不通,我就再問西,其次是南、東,要是這四個方向都不通或者抵達了終點,那我回到上一個地方,繼續探索其他沒去過的方向,我還要求自己要記住那些幫過他的人,但是那些給我幫倒忙的、讓我白費力氣的人,要忘記他們,有了這些規定之后,我就可以大膽的往前走了,既不用擔心到不了不目的地,也不用擔心重復走以前的路,
如果廣搜是一個人,那么她一定很貪心,而且喜新厭舊!她從一點出發去旅游,先把與起點相鄰的地方全部游覽一遍,然后再把與她剛游覽過的景點相鄰的景點全都游覽一邊……一直這樣,直至所有的景點都游覽一遍,
3.4 講解與備忘
上文中深度優先我們使用的是遞回的方式而廣度優先使用的是佇列,而在網路上標準寫法是深度優先采用的堆疊,廣度優先采用的佇列,兩者采用兩個資料結構的不同特點,保證遍歷節點的優先性,比如堆疊的特點是后進先出,從而保證其每一次遍歷到的子節點都先遍歷,而佇列的特點是先進先出,從而保證每一次遍歷的子節點都在后面排隊,而佇列前方的先遍歷,從而保證同級子節點的遍歷的優先性,
4. A星演算法
書接上文,我們降到了深度優先和廣度優先,上述兩個演算法都是窮舉式演算法,而(A-Star)演算法是一種靜態路網中求解最短路徑最有效的直接搜索方法,也是許多其他問題的常用啟發式演算法,A*演算法作為Dijkstra演算法(后續再用篇幅來闡述Dijkstra演算法)的擴展,因其高效性而被廣泛應用于尋路及圖的遍歷,
名詞解釋:
- 直接搜索演算法:直接在實際地圖上進行搜索,不經過任何預處理;
- 啟發式演算法:通過啟發函式引導演算法的搜索方向;
- 靜態圖搜索演算法:被搜索的圖的權值不隨時間變化(后被證明同樣可以適用于動態圖的搜索),
公式表示為: f(n)=g(n)+h(n)
其中,
- f(n) 是從初始狀態經由狀態n到目標狀態的代價估計,
- g(n) 是在狀態空間中從初始狀態到狀態n的實際代價,
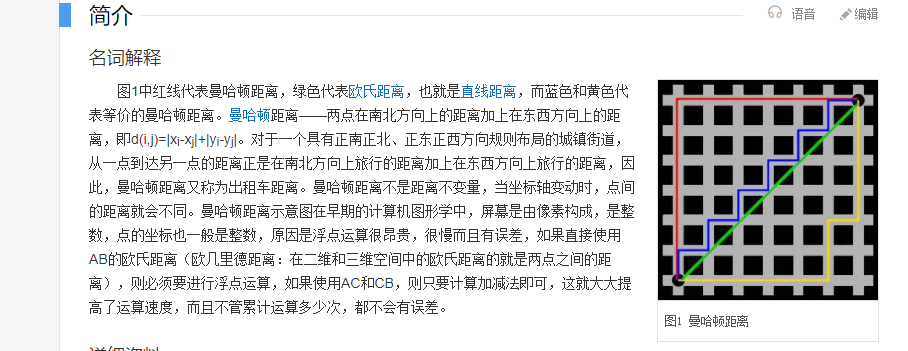
- h(n) 是從狀態n到目標狀態的最佳路徑的估計代價(歐幾里(斜邊的長度)/曼哈頓距離(x的距離+y的距離差)),
少逼逼,我們來分析演算法,
結合上文,我們說過深度優先和廣度優先都是窮舉演算法而A星演算法是屬于啟發式演算法,那么是通過什么做到啟發的呢!
鑒于視頻比博客更加有代入感以及程序性,推薦大家看: https://www.bilibili.com/video/BV147411u7r5?from=search&seid=14263924862056244840
4.1 基本原理
A星尋路演算法的基本原理就是不停的找自己周圍的點,選出一個新的點作為起點再次回圈
4.2 A星演算法的詳細原理
-
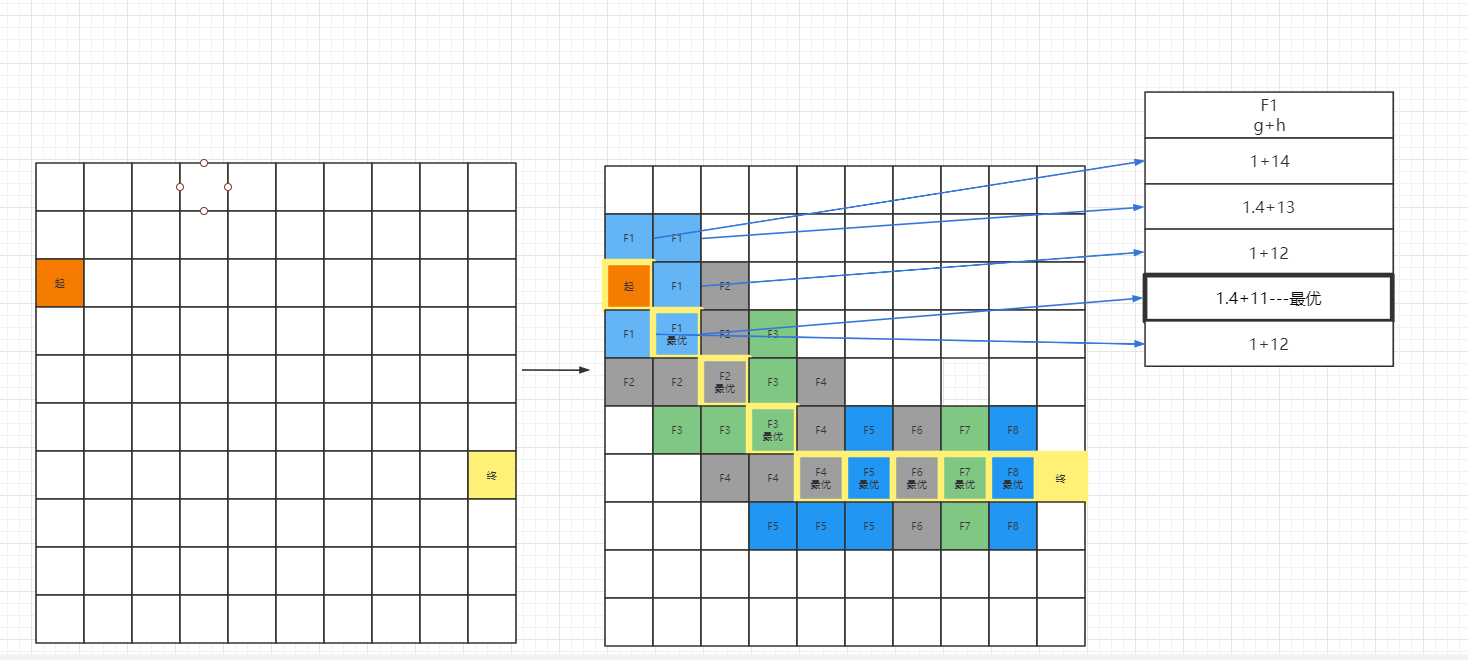
尋路消耗公式:
f(尋路消耗)=g(離起點的距離)+h(離終點的距離)
g(離起點的距離):代表離起點的距離:
g ( n ) = ( x 1 ? x 2 ) 2 + ( y 1 ? y 2 ) 2 g(n)=\sqrt{(x1-x2)^2+(y1-y2)^2} g(n)=(x1?x2)2+(y1?y2)2 ?
h(曼哈頓距離):圖上數格子
h ( n ) = ∣ x 1 ? x 2 ∣ + ∣ y 1 ? y 2 ∣ h(n)=|x1-x2|+|y1-y2| h(n)=∣x1?x2∣+∣y1?y2∣
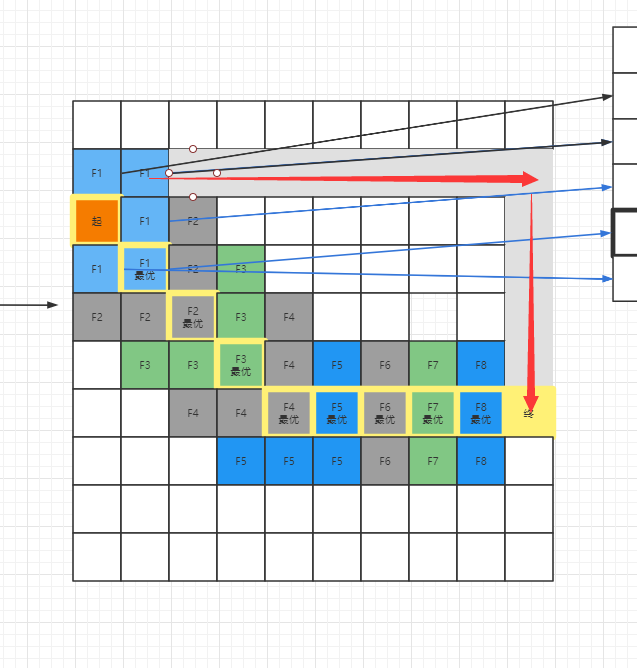
-
開啟串列:
當前起點我們需要尋找的串列
-
關閉串列:
已經尋找完畢的串列
-
格子物件的父物件:
每一次尋找的格子節點的父物件,如
F1的父物件為起點,F2的父物件為F1,以此類推,最后基于
關閉串列中的集合,通過格子的父物件從節點開始逆推我們可以找到一條路徑,
4.3 節選代碼
using GraphBaseFramewark;
using System;
using System.Collections.Concurrent;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading;
using System.Threading.Tasks;
using System.Windows.Media;
namespace GraphAStarAlgorithm
{
/// <summary>
/// A星尋路演算法
/// </summary>
class AStarAlgorithm
{
ShapeSquare[,] PlotShapeSquare = null;
int CrosswiseNodeCount = 0;
int LengthwaysNodeCount = 0;
public AStarAlgorithm(ShapeSquare[,] plotShapeSquare, int crosswiseNodeCount,int lengthwaysNodeCount)
{
PlotShapeSquare = plotShapeSquare;
CrosswiseNodeCount = crosswiseNodeCount;
LengthwaysNodeCount = lengthwaysNodeCount;
}
/// <summary>
/// 關閉串列
/// </summary>
Dictionary<ShapeSquare, ShapeSquare> dicClose = new Dictionary<ShapeSquare, ShapeSquare>();
/// <summary>
/// 演算法運行
/// </summary>
/// <param name="pStartShapeSquare"></param>
/// <param name="pEndShapeSquare"></param>
public void AlgorithmRun(ShapeSquare pStartShapeSquare, ShapeSquare pEndShapeSquare)
{
Tuple<int, int> pStartIndex = pStartShapeSquare.Tag as Tuple<int, int>;
dicClose.Add(pStartShapeSquare, null);
FindWayInfo(pStartIndex, pStartShapeSquare, pEndShapeSquare);
ShapeSquare pWayShapeSquare = pEndShapeSquare;
while (pWayShapeSquare!= pStartShapeSquare)
{
pWayShapeSquare.Fill = Brushes.YellowGreen;
Thread.Sleep(10);
System.Windows.Forms.Application.DoEvents();
pWayShapeSquare = dicClose[pWayShapeSquare];
}
}
private bool FindWayInfo(Tuple<int, int> pStartIndex, ShapeSquare pStartShapeSquare, ShapeSquare pEndShapeSquare)
{
ConcurrentDictionary<ShapeSquare, double> dicOpen = new ConcurrentDictionary<ShapeSquare, double>();
IsRange(pStartIndex.Item1-1, pStartIndex.Item2-1,1.4, pStartShapeSquare, dicOpen);
IsRange(pStartIndex.Item1-1, pStartIndex.Item2,1, pStartShapeSquare, dicOpen);
IsRange(pStartIndex.Item1-1, pStartIndex.Item2+1,1.4, pStartShapeSquare, dicOpen);
IsRange(pStartIndex.Item1, pStartIndex.Item2+1,1, pStartShapeSquare, dicOpen);
IsRange(pStartIndex.Item1+1, pStartIndex.Item2+1,1.4, pStartShapeSquare, dicOpen);
IsRange(pStartIndex.Item1+1, pStartIndex.Item2,1, pStartShapeSquare, dicOpen);
IsRange(pStartIndex.Item1+1, pStartIndex.Item2-1,1.4, pStartShapeSquare, dicOpen);
IsRange(pStartIndex.Item1, pStartIndex.Item2-1,1, pStartShapeSquare, dicOpen);
Tuple<int, int> pEndIndex = pEndShapeSquare.Tag as Tuple<int, int>;
foreach (var item in dicOpen.Keys)
{
Tuple<int, int> pItemIndex = item.Tag as Tuple<int, int>;
dicOpen[item] += Math.Abs((pEndIndex.Item1 - pItemIndex.Item1)) + Math.Abs((pEndIndex.Item2 - pItemIndex.Item2));
if (item == pEndShapeSquare)
{
return true;
}
}
List<KeyValuePair<ShapeSquare, double>> listSortOpen =dicOpen.OrderBy(a => a.Value).ToList();
foreach (var item in listSortOpen)
{
Tuple<int, int> pIndex = item.Key.Tag as Tuple<int, int>;
if (FindWayInfo(pIndex, item.Key, pEndShapeSquare))
{
return true;
}
}
return false;
}
private bool IsRange(int index1, int index2,double dStartLength,ShapeSquare pStartShapeSquare, ConcurrentDictionary<ShapeSquare,double> dicOpen)
{
if (index1 < 0 || index1 >= CrosswiseNodeCount)
{
return false;
}
if (index2 < 0 || index2 >= LengthwaysNodeCount)
{
return false;
}
ShapeSquare shapeSquare = PlotShapeSquare[index1, index2];
if (shapeSquare is ShapeSquare_BlockingPoint)
{
return false;
}
if (dicClose.ContainsKey(shapeSquare))
{
return false;
}
else
{
dicClose.Add(shapeSquare, pStartShapeSquare);
dicOpen.TryAdd(shapeSquare, dStartLength);
shapeSquare.Fill = Brushes.BurlyWood;
Thread.Sleep(10);
System.Windows.Forms.Application.DoEvents();
}
return true;
}
}
}
5 結語
由于這個演算法是一個啟發式演算法,所以需要處理一些特殊情況,如周圍點的f(n)相同時,順序問題等等,
這個時候我們再回過頭來看看國產SLG游戲中,三款游戲由時間順序的發展,地圖的變化,在演算法上它在解決什么問題呢?
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/289702.html
標籤:其他
上一篇:貪吃蛇小游戲原始碼分享
下一篇:三子棋小游戲(C語言版本)