目錄
1、主函式
mainPro.c
2、分檔案(所有的外設設備都是物件)
bathroomLight.c (浴室燈)
livingroomLight.c (睡房燈)
restaurantLight.c (廚房燈)
upstairLight.c (客廳燈)
buzzer.c(蜂鳴器)
fire.c (火焰傳感器)
camera.c (攝像頭)
client_wemos.c (樹莓派作為客戶端 連接wemos D1服務器)
socketContrl.c (socket控制)
voiceContrl.c(語音控制設備)
3、頭檔案
contrlDevices.h(外設設備的頭檔案)
inputCommand.h (控制的頭檔案)
本文只是匆匆的上傳一下代碼而已,很多細節并沒有涉及,主要是方便以后自己撰寫代碼時整體思路的參考,
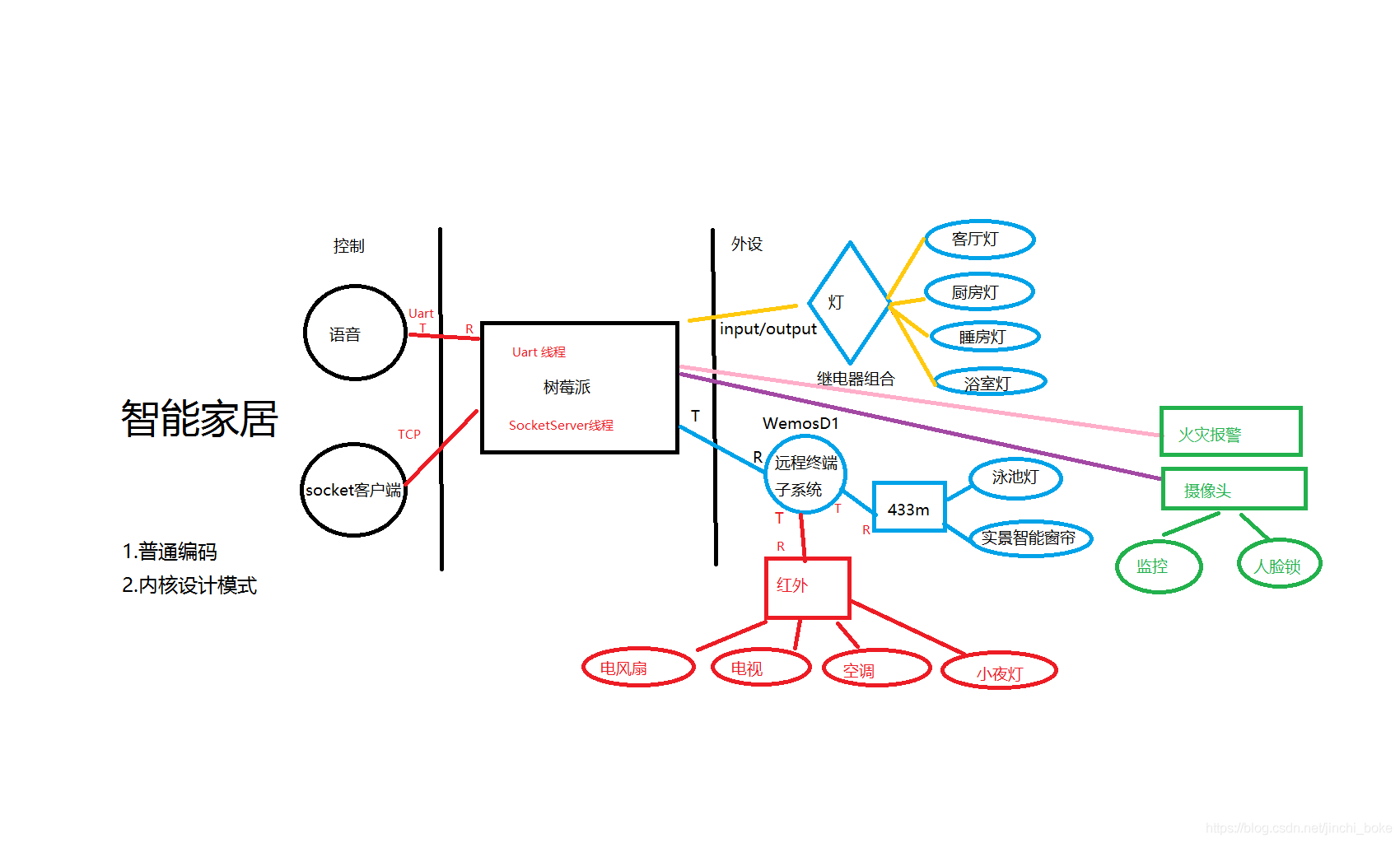
運用的是簡單工廠設計模式(普通編碼,仿內核設計模式),簡化main函式代碼,便于閱讀,所有控制以及外設的設備都做成一個個物件(java思想),分別將命令控制的連成一個控制鏈表,外設設備做成一個外設設備的鏈表,這樣做是為了方便以后功能模塊的添加,其中為了能分別做好控制,我們采用多執行緒來實作,
控制端:
語音控制,socket控制
硬體設備:
樹莓派、語音模塊、wemos D1、繼電器組、433M 射頻模塊、攝像頭、火焰傳感器、電磁鎖、蜂鳴器,
專案描述:
樹莓派通過串口連接各模塊硬體,檢測語音的識別結果,分析語音識別的結果來對家電設備進行控制,樹莓派攝像頭拍攝到人臉之后通過HTTPS訪問翔云平臺的人臉識別方案對比照片的base64編碼來進行人臉識別開鎖,由于語音模塊占用了樹莓派唯一的串口位,為了保留語音控制,所以,我將Wemos D1做成了服務器,讓樹莓派變為客戶端使用socket和wemos進行連接,wemos通過讀取樹莓派作為客戶端發送過來的資料來控制家電設備,完成了對于樹莓派的介面拓展,以便控制更多的設備,
紅外控制想做的,但是我的辣雞雜牌空調不支持我的這個紅外編解碼板子,所以這算是個小遺憾,
1、主函式
mainPro.c
#include <stdlib.h>
#include <stdio.h>
#include <string.h>
#include <unistd.h>
#include <pthread.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <arpa/inet.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <unistd.h>
#include <sys/stat.h>
#include <fcntl.h>
#include "contrlDevices.h"
#include "inputCommand.h"
pthread_t voiceThread; //注意:定義執行緒不使用指標以免空指標例外
pthread_t socketThread; //注意:不建議執行緒傳參(鏈表頭)所以定為全域變數
pthread_t fireThread;
pthread_t cameraThread;
pthread_t clientWemosThread;
struct InputCommander *pCommandHead = NULL;
struct Devices *pdeviceHead = NULL;
struct InputCommander *socketHandler = NULL;
struct InputCommander *clientHandler = NULL;
pthread_mutex_t mutex; //定義互斥量(鎖)
//pthread_cond_t cond; //條件
int c_fd; //注意:涉及到多執行緒不要輕易的去傳參
//攝像頭相關
#define true 1
#define false 0
typedef unsigned int bool;
char buf[1024] = {'\0'};
struct Devices *findDeviceByName(char *name,struct Devices *phead)
{
if(phead == NULL){
return NULL;
}
while(phead != NULL){
if(strstr(phead->deviceName,name) != NULL){
return phead;
}
phead = phead->next;
}
return NULL;
}
struct InputCommander *findCommandByName(char *name,struct InputCommander *phead)
{
if(phead == NULL){
return NULL;
}
while(phead != NULL){
if(strcmp(phead->commandName,name) == 0){
return phead;
}
phead = phead->next;
}
return NULL;
}
void *voice_thread(void *arg)
{
int i = 0;
int nread;
struct InputCommander *voiceHandler = NULL;
struct Devices *deviceTmp = NULL;
voiceHandler = findCommandByName("voice",pCommandHead);
if(voiceHandler == NULL){
printf("find voiceHandler error\n");
pthread_exit(NULL);
}else{
if(voiceHandler->Init(voiceHandler,NULL,NULL) < 0){
printf("voice init error\n");
pthread_exit(NULL); //退出執行緒
}else{
printf("%s init success\n",voiceHandler->commandName);
} //語音初始化完成
pthread_mutex_lock(&mutex); //加鎖
//為什么加這個鎖呢,我的想法是在語音讀取一級指令的時候,為了避免其它執行緒對于 緊接著讀取二級指令的干擾
while(1){
memset(voiceHandler->comand,'\0',sizeof(voiceHandler->comand));
nread = voiceHandler->getCommand(voiceHandler);
if(nread == 0){
//printf("noData from voice,please say again\n");
}else if(strstr(voiceHandler->comand,"all") != NULL){
printf("close all light\n");
deviceTmp = findDeviceByName("yu",pdeviceHead);
deviceTmp->close(deviceTmp->pinNum);
deviceTmp = findDeviceByName("ke",pdeviceHead);
deviceTmp->close(deviceTmp->pinNum);
deviceTmp = findDeviceByName("chu",pdeviceHead);
deviceTmp->close(deviceTmp->pinNum);
deviceTmp = findDeviceByName("shui",pdeviceHead);
deviceTmp->close(deviceTmp->pinNum);
}
else{
deviceTmp = findDeviceByName(voiceHandler->comand,pdeviceHead);
if(deviceTmp == NULL){
printf("findDeviceByName error\n");
}
else{
printf("findDevice = %s\n",deviceTmp->deviceName);
deviceTmp->deviceInit(deviceTmp->pinNum);
deviceTmp->open(deviceTmp->pinNum);
}
}
}
pthread_mutex_unlock(&mutex); //解鎖
}
}
size_t readData1( void *ptr, size_t size, size_t nmemb, void *stream)
{
memset(buf,'\0',1024);
strncpy(buf,ptr,1024);
}
char *getBase641(char *picture)
{
int fd;
int len;
char cmd[256] = {'\0'};
sprintf(cmd,"base64 %s > pictureBase64File",picture);
system(cmd);
fd = open("./pictureBase64File",O_RDWR);
len = lseek(fd,0,SEEK_END);
lseek(fd,0,SEEK_SET);
char *readBuf = (char *)malloc(len); //如果不是用動態,當我們將這個readBuf指標回傳去,則會段錯誤
read(fd,readBuf,len); //因為,readBuf是區域變數,靜態記憶體,程式一運行完畢,里面的內容被釋放(C語言基礎)
close(fd);
system("rm ./pictureBase64File");
return readBuf;
}
bool cameraContrlPostUrl()
{
CURL *curl;
CURLcode res;
char *postString;
struct Devices *deviceTmp = NULL;
char *img1;
char *img2;
char *key = "用自己的";
char *secret = "用自己的";
int typeId = 21;
char *format = "xml";
chdir("/home/pi/mjpg-streamer/mjpg-streamer-experimental");
system("./start.sh"); //運行攝像頭
chdir("/home/pi/yu/smartHome5_camera+face");
system("wget http://172.20.10.2:8080/?action=snapshot -O ./visitor.jpg"); //截圖實時視頻的照片
img1 = getBase641("./visitor.jpg");
img2 = getBase641("./me1.jpg");
int len = strlen(key)+strlen(secret)+strlen(img1)+strlen(img2)+124;
postString = (char *)malloc(strlen(key)+strlen(secret)+strlen(img1)+strlen(img2)+124);
memset(postString,'\0',len);
sprintf(postString,"&img1=%s&img2=%s&key=%s&secret=%s&typeId=%d&format=%s", //postString
img1,img2,key,secret,typeId,format);
system("rm visitor.jpg");
curl = curl_easy_init();
if (curl)
{
curl_easy_setopt(curl, CURLOPT_COOKIEFILE, "/tmp/cookie.txt"); // 指定cookie檔案
curl_easy_setopt(curl, CURLOPT_POSTFIELDS, postString); // ?指定post內容,用$符號拼接
curl_easy_setopt(curl, CURLOPT_URL, "https://netocr.com/api/faceliu.do"); // ?指定url
curl_easy_setopt(curl, CURLOPT_WRITEFUNCTION, readData1); //將回傳的http頭輸出到fp指向的檔案
res = curl_easy_perform(curl);
printf("ok = %d\n",res);
curl_easy_cleanup(curl);
printf("%s\n",buf);
if(strstr(buf,"是") != NULL){
deviceTmp = findDeviceByName("chu",pdeviceHead);
deviceTmp->open(deviceTmp->pinNum);
deviceTmp = findDeviceByName("yu",pdeviceHead);
deviceTmp->open(deviceTmp->pinNum);
deviceTmp = findDeviceByName("ke",pdeviceHead);
deviceTmp->open(deviceTmp->pinNum);
deviceTmp = findDeviceByName("shui",pdeviceHead);
deviceTmp->open(deviceTmp->pinNum);
}else{
printf("not a same of man\n");
}
}
return true;
}
void *read_thread(void *datas)
{
int n_read;
struct Devices *deviceTmp = NULL;
while(1){
memset(socketHandler->comand,'\0',sizeof(socketHandler->comand));
n_read = read(c_fd,socketHandler->comand,sizeof(socketHandler->comand));
if(n_read == -1){
perror("read_thread");
}else if(n_read > 0){
//printf("getCommand:%s\n",socketHandler->comand);
//處理客戶端讀到的命令
if(strstr(socketHandler->comand,"op_shui") != NULL){
deviceTmp = findDeviceByName("shui",pdeviceHead);
deviceTmp->deviceInit(deviceTmp->pinNum);
deviceTmp->open(deviceTmp->pinNum);
}
if(strstr(socketHandler->comand,"cl_shui") != NULL){
deviceTmp = findDeviceByName("shui",pdeviceHead);
deviceTmp->deviceInit(deviceTmp->pinNum);
deviceTmp->close(deviceTmp->pinNum);
}
if(strstr(socketHandler->comand,"op_yu") != NULL){
deviceTmp = findDeviceByName("yu",pdeviceHead);
deviceTmp->deviceInit(deviceTmp->pinNum);
deviceTmp->open(deviceTmp->pinNum);
}
if(strstr(socketHandler->comand,"cl_yu") != NULL){
deviceTmp = findDeviceByName("yu",pdeviceHead);
deviceTmp->deviceInit(deviceTmp->pinNum);
deviceTmp->close(deviceTmp->pinNum);
}
if(strstr(socketHandler->comand,"op_ke") != NULL){
deviceTmp = findDeviceByName("ke",pdeviceHead);
deviceTmp->deviceInit(deviceTmp->pinNum);
deviceTmp->open(deviceTmp->pinNum);
}
if(strstr(socketHandler->comand,"cl_ke") != NULL){
deviceTmp = findDeviceByName("ke",pdeviceHead);
deviceTmp->deviceInit(deviceTmp->pinNum);
deviceTmp->close(deviceTmp->pinNum);
}
if(strstr(socketHandler->comand,"op_chu") != NULL){
deviceTmp = findDeviceByName("chu",pdeviceHead);
deviceTmp->deviceInit(deviceTmp->pinNum);
deviceTmp->open(deviceTmp->pinNum);
}
if(strstr(socketHandler->comand,"cl_chu") != NULL){
deviceTmp = findDeviceByName("chu",pdeviceHead);
deviceTmp->deviceInit(deviceTmp->pinNum);
deviceTmp->close(deviceTmp->pinNum);
}
if(strcmp(socketHandler->comand,"1") == 0){ //發送資料給wemos
memset(clientHandler,'\0',sizeof(clientHandler));
strcpy(clientHandler->comand,"1");
write(clientHandler->sfd,clientHandler->comand,strlen(clientHandler->comand));
}
if(strcmp(socketHandler->comand,"2") == 0){ //發送資料給wemos
memset(clientHandler,'\0',sizeof(clientHandler));
strcpy(clientHandler->comand,"2");
write(clientHandler->sfd,clientHandler->comand,strlen(clientHandler->comand));
}
if(strstr(socketHandler->comand,"face") != NULL){ //進行人臉識別
//deviceTmp = findDeviceByName("face",pdeviceHead);
//deviceTmp->cameraInit(deviceTmp);
cameraContrlPostUrl();
}
if(strstr(socketHandler->comand,"cl_all") != NULL){
deviceTmp = findDeviceByName("chu",pdeviceHead);
deviceTmp->deviceInit(deviceTmp->pinNum);
deviceTmp->close(deviceTmp->pinNum);
deviceTmp = findDeviceByName("yu",pdeviceHead);
deviceTmp->deviceInit(deviceTmp->pinNum);
deviceTmp->close(deviceTmp->pinNum);
deviceTmp = findDeviceByName("ke",pdeviceHead);
deviceTmp->deviceInit(deviceTmp->pinNum);
deviceTmp->close(deviceTmp->pinNum);
deviceTmp = findDeviceByName("shui",pdeviceHead);
deviceTmp->deviceInit(deviceTmp->pinNum);
deviceTmp->close(deviceTmp->pinNum);
}
}
else{
printf("client quit\n");
exit(-1); //客戶端退出,服務器程式退出
//pthread_exit(NULL); //退出執行緒
}
}
}
void *socket_thread(void *datas)
{
int n_read = 0;
pthread_t readPthread;
struct sockaddr_in c_addr;
memset(&c_addr,0,sizeof(struct sockaddr_in));
int clen = sizeof(struct sockaddr_in);
socketHandler = findCommandByName("socketServer",pCommandHead);
if(socketHandler == NULL){
printf("find socketHandler error\n");
pthread_exit(NULL);
}else{
printf("%s init success\n",socketHandler->commandName);
}
socketHandler->Init(socketHandler,NULL,NULL);
while(1){
c_fd = accept(socketHandler->sfd,(struct sockaddr *)&c_addr, &clen);
pthread_create(&readPthread,NULL,read_thread,NULL);
}
}
void *fire_thread(void *datas)
{
int status;
struct Devices *fireDeviceTmp = NULL;
struct Devices *buzzerDeviceTmp = NULL;
fireDeviceTmp = findDeviceByName("fire",pdeviceHead);
buzzerDeviceTmp = findDeviceByName("buzzser",pdeviceHead);
fireDeviceTmp->deviceInit(fireDeviceTmp->pinNum);
buzzerDeviceTmp->deviceInit(buzzerDeviceTmp->pinNum);
printf("fire_thread init\n");
while(1){
delay(2000);
status = fireDeviceTmp->readStatus(fireDeviceTmp->pinNum);
//printf("fire get data = %d\n",status);
if(status == 0){
buzzerDeviceTmp->open(buzzerDeviceTmp->pinNum);
}else{
buzzerDeviceTmp->close(buzzerDeviceTmp->pinNum);
}
}
}
void *camera_thread(void *datas)
{
}
void *clientWemos_Thread(void *datas) //連接wemos
{
char *p;
//struct InputCommander *clientHandler = NULL; //放到全域,因為我要在socket那里接收用戶客戶端client的資料,然后發給wemos
//做客戶端連接wemosD1服務器
clientHandler = findCommandByName("client",pCommandHead);
if(clientHandler == NULL){
printf("find clientHandler error\n");
exit(-1);
}else{
clientHandler->Init(clientHandler,NULL,NULL);
}
while(1){
memset(clientHandler,'\0',sizeof(clientHandler));
printf("input your contrl wemosD1 command::\n");
fgets(clientHandler->comand,sizeof(clientHandler->comand),stdin); //不用gets,有警告
if((p = strchr(clientHandler->comand,'\n')) != NULL)
*p = '\0'; //手動將\n位置處的值變為0
write(clientHandler->sfd,clientHandler->comand,strlen(clientHandler->comand)); //向wemosD1發送資料
}
}
int main()
{
char name[32] = {'\0'};
//樹莓派庫初始化
if(wiringPiSetup() == -1){
printf("硬體介面初始化失敗\n");
return -1;
}
pthread_mutex_init(&mutex,NULL); //初始化互斥量(鎖)
//pthread_cond_init(&cond,NULL); //條件的創建(動態初始化)
//1、指令工廠初始化
pCommandHead = addVoiceContrlToInputCommanderLink(pCommandHead);
pCommandHead = addsocketContrlToInputCommanderLink(pCommandHead);
pCommandHead = addclientContrlToInputCommanderLink(pCommandHead);
//2、設備控制工程初始化
pdeviceHead = addBathroomLightToDeviceLink(pdeviceHead);
pdeviceHead = addupStairLightToDeviceLink(pdeviceHead);
pdeviceHead = addlivingroomLightToDeviceLink(pdeviceHead);
pdeviceHead = addrestaurantLightToDeviceLink(pdeviceHead);
pdeviceHead = addFireToDeviceLink(pdeviceHead);
pdeviceHead = addBuzzerToDeviceLink(pdeviceHead);
//pdeviceHead = addcameraContrlToDeviceLink(pdeviceHead);
//int pthread_create(pthread_t *restrict tidp, const pthread_attr_t *restrict attr, void *(*start_rtn)(void *), void *restrict arg);
//3、執行緒池的建立
//3.1、語音執行緒
pthread_create(&voiceThread,NULL,voice_thread,NULL); //引數2:執行緒屬性,一般設定為NULL,引數3:執行緒干活的函式,引數4:往voice_thread執行緒里面傳送資料,
//3.2、socket服務器執行緒
pthread_create(&socketThread,NULL,socket_thread,NULL);
//3.3、火災執行緒
pthread_create(&fireThread,NULL,fire_thread,NULL);
//3.4、攝像頭執行緒
//pthread_create(&cameraThread,NULL,camera_thread,NULL);
//3.5、作為客戶端連接wemosD1服務器
pthread_create(&clientWemosThread,NULL,clientWemos_Thread,NULL);
//等待執行緒
pthread_join(voiceThread,NULL);
pthread_join(socketThread,NULL);
pthread_join(fireThread,NULL);
pthread_join(cameraThread,NULL);
pthread_join(clientWemosThread,NULL);
pthread_mutex_destroy(&mutex); //銷毀互斥量
//pthread_cond_destroy(&cond); //條件的銷毀
/*開始創建設備工廠的除錯代碼
while(1){
printf("input:\n");
memset(name,'\0',sizeof(name));
gets(name);
tmp = findDeviceByName(name,pdeviceHead);
if(tmp != NULL){
tmp->deviceInit(tmp->pinNum);
tmp->open(tmp->pinNum);
}
}
*/
return 0;
}
2、分檔案(所有的外設設備都是物件)
bathroomLight.c (浴室燈)
#include "contrlDevices.h"
int bathroomLightOpen(int pinNum)
{
digitalWrite (pinNum,LOW);
}
int bathroomLightClose(int pinNum)
{
digitalWrite (pinNum,HIGH);
}
int bathroomLightCloseInit(int pinNum)
{
pinMode (pinNum, OUTPUT);
digitalWrite (pinNum,HIGH);
}
int bathroomLightCloseStatus(int status)
{
}
struct Devices bathroomLight = {
//.deviceName = "bathroomLight",
.deviceName = "yu",
.pinNum = 22,
.open = bathroomLightOpen,
.close = bathroomLightClose,
.deviceInit = bathroomLightCloseInit,
.changStatus = bathroomLightCloseStatus
};
struct Devices *addBathroomLightToDeviceLink(struct Devices *phead)
{
if(phead == NULL){
return &bathroomLight;
}else{
bathroomLight.next = phead;
phead = &bathroomLight;
}
return phead;
}
livingroomLight.c (睡房燈)
#include "contrlDevices.h"
int livingroomLightOpen(int pinNum)
{
digitalWrite (pinNum,LOW);
}
int livingroomLightClose(int pinNum)
{
digitalWrite (pinNum,HIGH);
}
int livingroomLightCloseInit(int pinNum)
{
pinMode (pinNum, OUTPUT);
digitalWrite (pinNum,HIGH);
}
int livingroomLightCloseStatus(int status)
{
}
struct Devices livingroomLight = {
//.deviceName = "livingroomLight",
.deviceName = "shui",
.pinNum = 21,
.open = livingroomLightOpen,
.close = livingroomLightClose,
.deviceInit = livingroomLightCloseInit,
.changStatus = livingroomLightCloseStatus
};
struct Devices *addlivingroomLightToDeviceLink(struct Devices *phead)
{
if(phead == NULL){
return &livingroomLight;
}else{
livingroomLight.next = phead;
phead = &livingroomLight;
}
return phead;
}
restaurantLight.c (廚房燈)
#include "contrlDevices.h"
int restaurantLightOpen(int pinNum)
{
digitalWrite (pinNum,LOW);
}
int restaurantLightClose(int pinNum)
{
digitalWrite (pinNum,HIGH);
}
int restaurantLightCloseInit(int pinNum)
{
pinMode (pinNum, OUTPUT);
digitalWrite (pinNum,HIGH);
}
int restaurantLightCloseStatus(int status)
{
}
struct Devices restaurantLight = {
//.deviceName = "restaurantLight",
.deviceName = "chu",
.pinNum = 23,
.open = restaurantLightOpen,
.close = restaurantLightClose,
.deviceInit = restaurantLightCloseInit,
.changStatus = restaurantLightCloseStatus
};
struct Devices *addrestaurantLightToDeviceLink(struct Devices *phead)
{
if(phead == NULL){
return &restaurantLight;
}else{
restaurantLight.next = phead;
phead = &restaurantLight;
}
return phead;
}
upstairLight.c (客廳燈)
#include "contrlDevices.h"
int upStairLightOpen(int pinNum)
{
digitalWrite (pinNum,LOW);
}
int upStairLightClose(int pinNum)
{
digitalWrite (pinNum,HIGH);
}
int upStairLightCloseInit(int pinNum)
{
pinMode (pinNum, OUTPUT);
digitalWrite (pinNum,HIGH);
}
int upStairLightCloseStatus(int status)
{
}
struct Devices upStairLight = {
//.deviceName = "upStairLight",
.deviceName = "ke",
.pinNum = 24,
.open = upStairLightOpen,
.close = upStairLightClose,
.deviceInit = upStairLightCloseInit,
.changStatus = upStairLightCloseStatus
};
struct Devices *addupStairLightToDeviceLink(struct Devices *phead)
{
if(phead == NULL){
return &upStairLight;
}else{
upStairLight.next = phead;
phead = &upStairLight;
}
return phead;
}
buzzer.c(蜂鳴器)
#include "contrlDevices.h"
int buzzerOpen(int pinNum)
{
digitalWrite (pinNum,LOW);
}
int buzzerClose(int pinNum)
{
digitalWrite (pinNum,HIGH);
}
int buzzerInit(int pinNum)
{
pinMode (pinNum, OUTPUT);
digitalWrite (pinNum,HIGH);
}
struct Devices buzzer = {
.deviceName = "buzzser",
.pinNum = 7,
.open = buzzerOpen,
.close = buzzerClose,
.deviceInit = buzzerInit
};
struct Devices *addBuzzerToDeviceLink(struct Devices *phead)
{
if(phead == NULL){
return &buzzer;
}else{
buzzer.next = phead;
phead = &buzzer;
}
return phead;
}
fire.c (火焰傳感器)
#include "contrlDevices.h"
int fireInit(int pinNum)
{
pinMode (pinNum,INPUT);
digitalWrite (pinNum,HIGH);
}
int readFireStatus(int pinNum)
{
return digitalRead(pinNum);
}
struct Devices fire = {
.deviceName = "fire",
.pinNum = 25,
.deviceInit = fireInit,
.readStatus = readFireStatus
};
struct Devices *addFireToDeviceLink(struct Devices *phead)
{
if(phead == NULL){
return &fire;
}else{
fire.next = phead;
phead = &fire;
}
return phead;
}
camera.c (攝像頭)
#include "contrlDevices.h"
#include <string.h>
#include <stdlib.h>
#include <sys/types.h>
#include <unistd.h>
#include <sys/stat.h>
#include <fcntl.h>
#define true 1
#define false 0
typedef unsigned int bool;
char resultBuf[1024] = {'\0'};
size_t readData( void *ptr, size_t size, size_t nmemb, void *stream) //回呼函式
{
strncpy(resultBuf,ptr,1024);
//printf("%s\n",resultBuf);
}
char *getBase64(char *picture) //獲取圖片的base64流
{
int fd;
int len;
char cmd[256] = {'\0'};
sprintf(cmd,"base64 %s > pictureBase64File",picture);
system(cmd);
fd = open("./pictureBase64File",O_RDWR);
len = lseek(fd,0,SEEK_END);
lseek(fd,0,SEEK_SET);
char *readBuf = (char *)malloc(len); //如果不是用動態,當我們將這個readBuf指標回傳去,則會段錯誤
read(fd,readBuf,len); //因為,readBuf是區域變數,靜態記憶體,程式一運行完畢,里面的內容被釋放(C語言基礎)
close(fd);
system("rm ./pictureBase64File");
return readBuf;
}
bool cameraContrl_postUrl(struct Devices *camera)
{
CURL *curl;
CURLcode res;
char *postString;
char *img1;
char *img2;
system("raspistill -w 700 -h 525 -o ./visitor.jpg");
img1 = getBase64("./visitor.jpg");
img2 = getBase64("./me1.jpg");
int len = strlen(camera->key)+strlen(camera->secret)+strlen(img1)+strlen(img2)+124;
postString = (char *)malloc(strlen(camera->key)+strlen(camera->secret)+strlen(img1)+strlen(img2)+124);
memset(postString,'\0',len);
sprintf(postString,"&img1=%s&img2=%s&key=%s&secret=%s&typeId=%d&format=%s",
img1,img2,camera->key,camera->secret,camera->typeId,camera->format);
system("rm visitor.jpg");
curl = curl_easy_init();
if (curl)
{
curl_easy_setopt(curl, CURLOPT_COOKIEFILE, "/tmp/cookie.txt"); // 指定cookie檔案
curl_easy_setopt(curl, CURLOPT_POSTFIELDS, postString); // ?指定post內容,用$符號拼接
curl_easy_setopt(curl, CURLOPT_URL, "https://netocr.com/api/faceliu.do"); // ?指定url
curl_easy_setopt(curl, CURLOPT_WRITEFUNCTION, readData1); //將回傳的http頭輸出到fp指向的檔案
res = curl_easy_perform(curl);
res = curl_easy_perform(curl);
//printf("ok = %d\n",res);
printf("%s\n",resultBuf);
if(strstr(resultBuf,"是") != NULL){
printf("ok\n");
}else{
printf("no\n");
}
curl_easy_cleanup(curl);
}
return true;
}
struct Devices cameraContrl = {
.deviceName = "camera",
.key = "用自己的",
.secret = "用自己的",
.typeId = 21,
.format = "xml",
.cameraInit = cameraContrl_postUrl,
.next = NULL
};
struct Devices *addcameraContrlToDeviceLink(struct Devices *phead)
{
if(phead == NULL){
return &cameraContrl;
}else{
cameraContrl.next = phead;
phead = &cameraContrl;
}
return phead;
}
client_wemos.c (樹莓派作為客戶端 連接wemos D1服務器)
#include <wiringPi.h>
#include <stdio.h>
#include <stdlib.h>
#include <wiringSerial.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <arpa/inet.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <string.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include "inputCommand.h"
int clientInit(struct InputCommander *client,char *ipAdress,char *port)
{
struct sockaddr_in addr;
memset(&addr,0,sizeof(struct sockaddr_in));
//1.socket 創建套接字
int s_fd=socket(AF_INET, SOCK_STREAM,0);
if (s_fd==-1)
{
perror("socket");
exit(-1);
}
addr.sin_family=AF_INET;
addr.sin_port=htons(atoi(client->port));
inet_aton(client->ipAdress,&addr.sin_addr);
//2.connect 連接服務器
if(connect(s_fd,(struct sockaddr *)&addr,sizeof(struct sockaddr))==-1) //這里是連接wemosD1
{
perror("connect");
exit(-1);
}
printf("client wemosD1 connect....\n");
client->sfd = s_fd;
return s_fd;
}
struct InputCommander clientContrl = {
.commandName = "client", //加入到控制鏈表的名字
.comand = {'\0'}, //命令
.port = "8888", //wemosD1 埠號
.ipAdress = "172.20.10.12", //wemosD1 IP地址
.Init = clientInit, //樹莓派客戶端初始化
.next = NULL
};
struct InputCommander *addclientContrlToInputCommanderLink(struct InputCommander *phead)
{
if(phead == NULL){
return &clientContrl;
}else{
clientContrl.next = phead;
phead = &clientContrl;
}
return phead;
}
socketContrl.c (socket控制)
#include <wiringPi.h>
#include <stdio.h>
#include <stdlib.h>
#include <wiringSerial.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <arpa/inet.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <string.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include "inputCommand.h"
int socketgetCommand(struct InputCommander *socketMes)
{
int c_fd;
int n_read;
struct sockaddr_in c_addr;
memset(&c_addr,0,sizeof(struct sockaddr_in));
int clen = sizeof(struct sockaddr_in);
//4.accept ����
c_fd = accept(socketMes->sfd,(struct sockaddr *)&c_addr, &clen);
n_read = read(c_fd,socketMes->comand,sizeof(socketMes->comand));
if(n_read == -1){
perror("read");
}else if(n_read > 0){
printf("\nget:%d\n",n_read);
}else{
printf("client quit\n");
}
return n_read;
}
int socketInit(struct InputCommander *socketMes,char *ipAdress,char *port)
{
/*形參雖然定多了,用不上,咱不管*/
int s_fd;
struct sockaddr_in s_addr;
memset(&s_addr,0,sizeof(struct sockaddr_in));
//1.socket
s_fd = socket(AF_INET,SOCK_STREAM,0);
if(s_fd == -1){
perror("socked");
exit(-1);
}
s_addr.sin_family = AF_INET;
s_addr.sin_port = htons(atoi(socketMes->port));
inet_aton(socketMes->ipAdress,&s_addr.sin_addr);
//2.bind
bind(s_fd, (struct sockaddr *)&s_addr,sizeof(struct sockaddr_in));
//3.listen
listen(s_fd,10);
printf("socket Server listening......\n");
socketMes->sfd = s_fd;
return s_fd;
}
struct InputCommander socketContrl = {
.commandName = "socketServer",
.comand = {'\0'},
.port = "8083",
.ipAdress = "172.20.10.2",
.Init = socketInit,
.getCommand = socketgetCommand,
.log = {'\0'},
.next = NULL
};
struct InputCommander *addsocketContrlToInputCommanderLink(struct InputCommander *phead)
{
if(phead == NULL){
return &socketContrl;
}else{
socketContrl.next = phead;
phead = &socketContrl;
}
return phead;
}
voiceContrl.c(語音控制設備)
#include <wiringPi.h>
#include <stdio.h>
#include <stdlib.h>
#include <wiringSerial.h>
#include <unistd.h>
#include <string.h>
#include "inputCommand.h"
int getCommand(struct InputCommander *voicer)
{
int nread = 0;
memset(voicer->comand,'\0',sizeof(voicer->comand));
nread = read(voicer->fd,voicer->comand,sizeof(voicer->comand));
return nread;
}
int voiceInit(struct InputCommander *voicer,char *ipAdress,char *port)
{
/*形參雖然定多了,用不上,咱不管*/
int fd;
if((fd = serialOpen(voicer->deviceName,9600)) == -1){
exit(-1);
}
voicer->fd = fd;
return fd;
}
struct InputCommander voiceContrl = {
.commandName = "voice",
.deviceName = "/dev/ttyAMA0",
//.boTelv = "9600";
.comand = {'\0'},
.Init = voiceInit,
.getCommand = getCommand,
.log = {'\0'},
.next = NULL
};
struct InputCommander *addVoiceContrlToInputCommanderLink(struct InputCommander *phead)
{
if(phead == NULL){
return &voiceContrl;
}else{
voiceContrl.next = phead;
phead = &voiceContrl;
}
return phead;
}
3、頭檔案
contrlDevices.h(外設設備的頭檔案)
#include <wiringPi.h>
#include <stdio.h>
#include <curl/curl.h>
typedef unsigned int bool;
struct Devices
{
char deviceName[128]; //設備名
int status; //讀取到的資料
int pinNum; //引腳號
int (*open)(int pinNum); //打開設備函式指標
int (*close)(int pinNum); //關閉設備函式指標
int (*deviceInit)(int pinNum); //設備初始化函式指標
int (*readStatus)(int pinNum); //讀取資料函式指標
int (*changStatus)(int status); //改變資料函式指標
//攝像頭相關的
CURL *curl;
char *key;
char *secret;
int typeId;
char *format;
bool (*cameraInit)(struct Devices *camera);
int yesNum;
int noNum;
struct Devices *next;
};
//每個設備加到鏈表函式的宣告
struct Devices *addBathroomLightToDeviceLink(struct Devices *phead);
struct Devices *addupStairLightToDeviceLink(struct Devices *phead);
struct Devices *addlivingroomLightToDeviceLink(struct Devices *phead);
struct Devices *addrestaurantLightToDeviceLink(struct Devices *phead);
struct Devices *addFireToDeviceLink(struct Devices *phead);
struct Devices *addBuzzerToDeviceLink(struct Devices *phead);
struct Devices *addcameraContrlToDeviceLink(struct Devices *phead);inputCommand.h (控制的頭檔案)
#include <wiringPi.h>
#include <stdio.h>
struct InputCommander
{
char commandName[128]; //socket名
char deviceName[128]; //串口名
char comand[32]; //控制命令
int (*Init)(struct InputCommander *voicer,char *ipAdress,char *port); //socket初始化
int (*getCommand)(struct InputCommander *voicer); //讀取資料
char log[1024];
int fd;
char port[12]; //埠號
char ipAdress[32]; //IP地址
int sfd;
int cfd;
struct InputCommander *next;
};
//每個控制添加到控制鏈表的函式宣告
struct InputCommander *addVoiceContrlToInputCommanderLink(struct InputCommander *phead);
struct InputCommander *addsocketContrlToInputCommanderLink(struct InputCommander *phead);
struct InputCommander *addclientContrlToInputCommanderLink(struct InputCommander *phead);
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/290380.html
標籤:其他