目錄
- 一、背景詳解
- 二、卡爾曼濾波(Kalman)原理
- 三、總結
- 參考文獻
一、背景詳解
卡爾曼濾波(Kalman filter)是一種高效的自回歸濾波器,它能在存在諸多不確定性情況的組合資訊中估計動態系統的狀態,是一種強大的、通用性極強的工具,
只要是存在不確定資訊的動態系統,卡爾曼濾波(Kalman)就可以對系統下一步要做什么做出有根據的推測,即便有噪聲資訊干擾,卡爾曼濾波通常也能很好的弄清楚究竟發生了什么,找出現象間不易察覺的相關性因此卡爾曼濾波(Kalman)非常適合不斷變化的系統,它的優點還有記憶體占用較小(只需保留前一個狀態)、速度快,是實時問題和嵌入式系統的理想選擇(參見YOLOv5和DeepSORT在Jetson NX板上的部署),
卡爾曼濾波(Kalman)無論是在單目標還是多目標領域都是很常用的一種演算法,我們將卡爾曼濾波看做一種運動模型,用來對目標的位置進行預測,并且利用預測結果對跟蹤的目標進行修正,屬于自動控制理論中的—種方法, 在對視頻中的目標進行跟蹤時,當目標運動速度較慢時,很容易將前后兩幀的目標進行關聯:可以利用之前幾幀的位置來預測下一幀的位置,即可關聯同一目標,
二、卡爾曼濾波(Kalman)原理
目標的位置、速度、加速度的測量值往往在任何時候都有噪聲,卡爾曼濾波利用目標的動態資訊,設法去掉噪聲的影響,得到一個關于目標位置的好的估計,這個估計可以是對當前目標位置的估計(濾波),也可以是對于將來位置的估計(預測),也可以是對過去位置的估計(插值或平滑),
有一輛小車在行駛,它的速度是v,可以通過觀測得到它的位置p,也就是說我們可以實時的觀測小車的狀態,
小車在某一時刻的狀態表示為一個向量,
? 雖然我們比較確定小車此時的狀態,無論是計算還是檢測都會存在一定的誤差,所以我們只能認為當前狀態是其真實狀態的一個最優估計,那么我們不妨認為當前狀態服從一個高斯分布,
考慮軌道上的一個小車,無外力作用,它在時刻t的狀態向量只與t-1相關:(狀態向量就是描述它的t=0時刻所有狀態的向量,比如:[速度大小5m/s, 速度方向右, 位置坐標0],反正有了這個向量就可以完全預測t=1時刻小車的狀態)那么根據t=0時刻的初值,理論上我們可以求出它任意時刻的狀態,
當然,實際情況不會這么美好,這個遞推函式可能會受到各種不確定因素的影響(內在的外在的都算,比如刮風下雨地震,小車結構不緊密,輪子不圓等等)導致并不能精確標識小車實際的狀態,
我們假設每個狀態分量受到的不確定因素都服從正態分布,現在僅對小車的位置進行估計請看下圖:t=0時小車的位置服從紅色的正態分布,
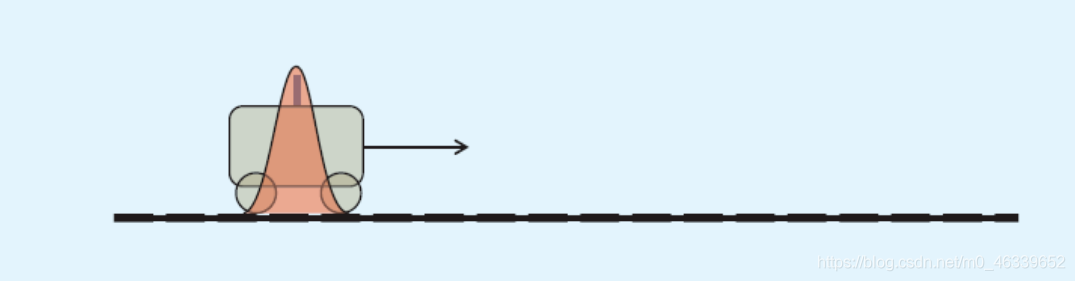
根據小車的這個位置,我們可以預測出t=1時刻它的位置:

分布變“胖”了,這很好理解——因為在遞推的程序中又加了一層噪聲,所以不確定度變大了,為了避免純估計帶來的偏差,我們在t=1時刻對小車的位置坐標進行一次雷達測量,當然雷達對小車距離的測量也會受到種種因素的影響,于是測量結果告訴我們,小車t=1時的位置服從藍色分布:
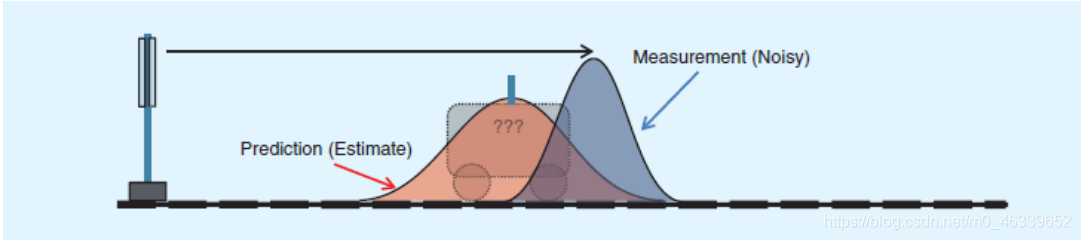
現在我們得到兩個不同的結果,前面有人提過加權,Kalman的牛逼之處就在于找到了相應權值,使紅藍分布合并為下圖這個綠色的正態分布(啰嗦一句,這個綠色分布均值位置在紅藍均值間的比例稱為Kalman增益(比如下圖中近似0.8),就是各種公式里的K(t)),

綠色分布不僅保證了在紅藍給定的條件下,小車位于該點的概率最大,而且,而且,它居然還是一個正態分布,這意味著可以把它當做初值繼續往下算了!這是Kalman濾波能夠迭代的關鍵,
最后,把綠色分布當做第一張圖中的紅色分布對t=2時刻進行預測,演算法就可以開始回圈往復了,那么綠色分布是怎么得出的呢?其實可以通過多種方式推匯出來,有最大似然法、Ricatti方程法,以及直接對高斯密度函式變形法,另外,由于我只對小車位移這個一維量做了估計,因此Kalman增益是標量,通常情況下它都是一個矩陣,而且如果估計多維量,還應該引入協方差矩陣的迭代,
Kalman濾波演算法的本質就是利用兩個正態分布的融合仍是正態分布這一特性進行迭代而已,
三、總結
總的來說,卡爾曼濾波器是一個狀態估計器,它利用傳感器融合、資訊融合來提高系統的精度,通常,我們要觀測一個系統的狀態,有兩種手段,一種是通過系統的狀態轉移方程,并結合上一時刻的狀態推得下一時刻的狀態,一種是借助 輔助系統(量測系統) 的測量得到系統狀態,這兩種方式都有各自的不確定性,卡爾曼濾波可以將這兩者做到最優結合(加權平均),使得我們估計的狀態的不確定性小于其中任何一種,所以權重的選擇至關重要,它意味著我們更信任哪一種方式得出的狀態(當然是更加信任不確定性較小的狀態),
參考文獻
http://www.bzarg.com/p/how-a-kalman-filter-works-in-pictures/
https://aistudio.baidu.com/aistudio/projectdetail/2025419?channelType=0&channel=0
https://aistudio.baidu.com/aistudio/projectdetail/2079759?channelType=0&channel=0
https://zhuanlan.zhihu.com/p/39912633
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/292143.html
標籤:其他