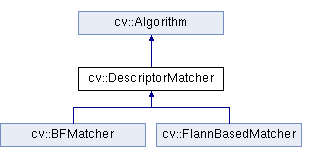
OpenCV 中有兩種特征匹配方法:暴力匹配 (Brute force matching) 和 最近鄰匹配 (Nearest Neighbors matching)
它們都繼承自 DescriptorMatcher,是基于特征描述符距離的匹配,根據描述符的不同,距離可以是 歐氏距離,也可以是 漢明距
1 暴力匹配
首先,任取影像 A 的一個特征描述符,計算它到影像 B 中所有特征描述符的距離;然后,將所得到的距離進行排序;最后,選擇距離最短的特征,作為 A-B 的匹配點
1.1 BFMatcher
BFMatcher 屬于 features2d 模塊,繼承自 DescriptorMatcher,其 create() 函式如下:
static Ptr<BFMatcher> create( int normType = NORM_L2, // normType, One of NORM_L1, NORM_L2, NORM_HAMMING, NORM_HAMMING2. bool crossCheck = false // crossCheck );
1) normType 距離型別
SIFT和SURF 的 HOG 描述符,對應歐氏距離 L1 和 L2;ORB 和 BRISK 的 BRIEF 描述符,對應漢明距 HAMMING;HAMMING2 則對應當 WTA_K = 3或4 時的 ORB 演算法
- 歐氏距離:最常用的一種距離定義,指的是 n 維空間中,兩點之間的實際距離
$L1 = \sum_I | \texttt{src1} (I) - \texttt{src2}|$
$L2 = \sqrt{\sum_I (\texttt{src1}(I) - \texttt{src2}(I))^2}$
- 漢明距離:計算機的異或操作,適用于二進制串描述符,如 BRIEF 描述符,定義如下:
$ Hamming \left ( a,b \right ) = \sum\limits_{i=0}^{n-1} \left ( a_i \oplus b_i \right ) $
2) crossCheck 交叉核對
- 如果在影像 B 中,特征 $f_{b}$ 是特征 $f_{a}$ 的最佳匹配,并且在影像 A 中,特征 $f_{a}$ 也是特征 $f_{b}$ 的最佳匹配,則稱 $(f_{a}, f_{b})$ 為 "good match"
1.2 代碼示例
特征匹配步驟如下:讀圖 -> 提取特征 -> 計算特征描述符 -> 暴力匹配 -> 顯示匹配結果
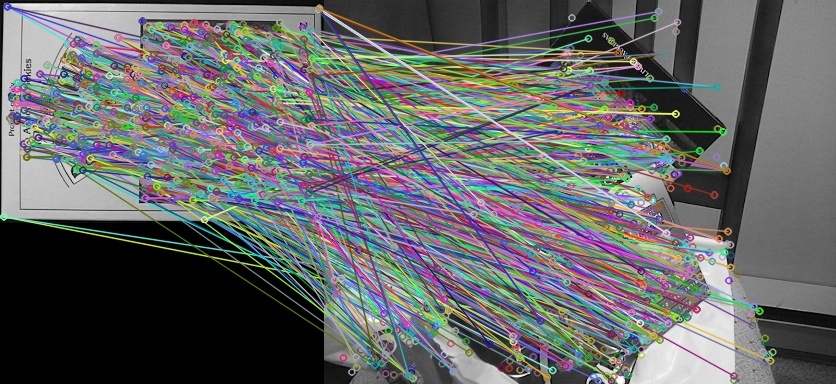
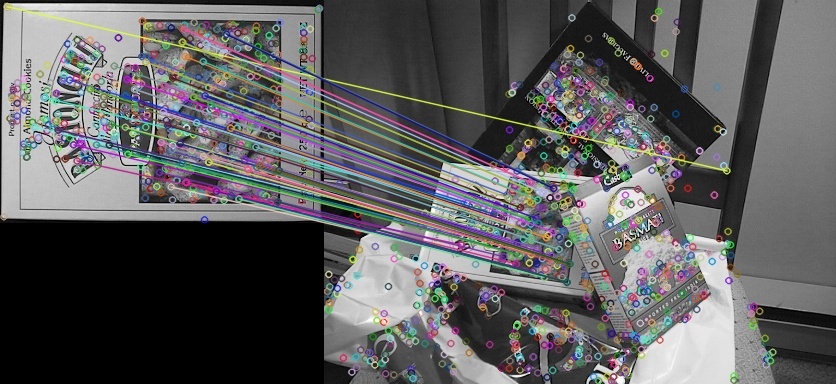
#include "opencv2/highgui.hpp" #include "opencv2/features2d.hpp" using namespace cv; int main() { // 1) read Mat img1 = imread("box.png", IMREAD_GRAYSCALE); Mat img2 = imread("box_in_scene.png", IMREAD_GRAYSCALE); if (img1.empty() || img2.empty()) return -1; // 2) detect and compute Ptr<SIFT> sift = SIFT::create(); std::vector<KeyPoint> kps1, kps2; Mat desc1, desc2; sift->detectAndCompute(img1, Mat(), kps1, desc1); sift->detectAndCompute(img2, Mat(), kps2, desc2); // 3) match Ptr<BFMatcher> bfmatcher = BFMatcher::create(NORM_L2, true); std::vector<DMatch> matches; bfmatcher->match(desc1, desc2, matches); // 4) draw and show Mat img_matches; drawMatches(img1, kps1, img2, kps2, matches, img_matches); imshow("BFMatcher", img_matches); waitKey(); }
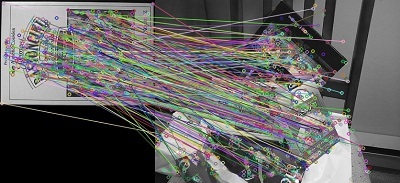
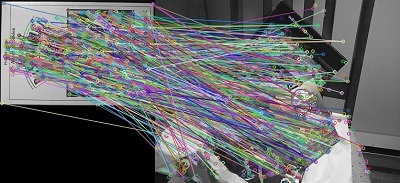
crosscheck 分別為 true 和 false:
2 最近鄰匹配
FLANN 是一個開源庫,全稱 Fast Library for Approximate Nearest Neighbors,它實作了一系列高維向量的近似最近鄰搜索演算法
基于 FLANN 庫的最近鄰匹配算子 FlannBasedMatcher,在特征資料集較大或一些實時處理領域,其運行效率要遠高于 BFMatcher
OpenCV 中 FlannBasedMatcher 的定義如下:
// This matcher trains cv::flann::Index on a train descriptor collection and calls its nearest search methods to find the best matches.
// So, this matcher may be faster when matching a large train collection than the brute force matcher. class FlannBasedMatcher : public DescriptorMatcher { public: FlannBasedMatcher( const Ptr<flann::IndexParams>& indexParams=makePtr<flann::KDTreeIndexParams>(), const Ptr<flann::SearchParams>& searchParams=makePtr<flann::SearchParams>() ); static Ptr<FlannBasedMatcher> create();
2.1 距離比
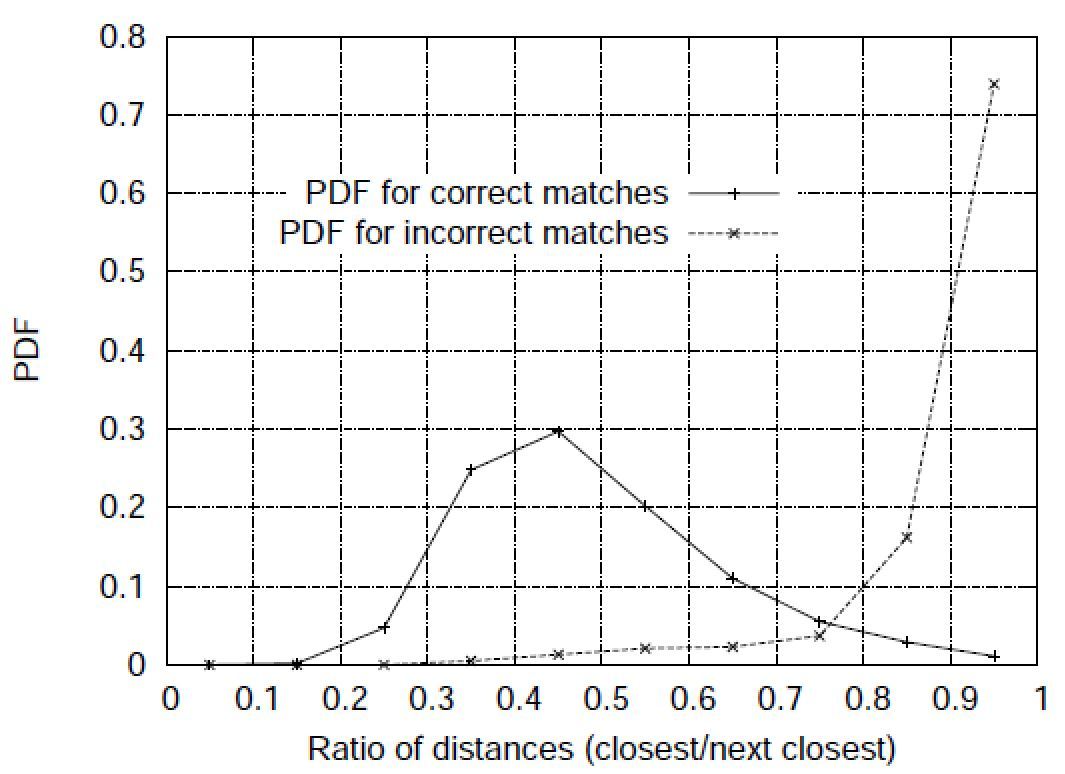
為了進一步提高特征匹配精度,David Lowe 提出了一種最近鄰次近鄰距離比的方法:
- 取影像 A 的一個特征,搜索它到影像 B 距離最近的兩個特征,距離分別記為 $d_{1}$ 和 $d_{2}$,只有當 $\displaystyle{\frac{d_{1}}{d_{2}}}$ 小于某個閾值時,才認為是 "good match"
"good match" 的概率密度函式 PDF (Probability Density Function) 與最近鄰次近鄰距離比的關系,如下:
2.2 代碼示例
取 distance ratio = 0.7,對比使用和不使用距離比濾波的匹配效果,代碼如下:
#include "opencv2/highgui.hpp" #include "opencv2/features2d.hpp" using namespace cv; const float kRatioThresh = 0.7f; int main() { // 1) read Mat img1 = imread("box.png", IMREAD_GRAYSCALE); Mat img2 = imread("box_in_scene.png", IMREAD_GRAYSCALE); if (img1.empty() || img2.empty()) return -1; // 2) detect feature and compute descriptor Ptr<SIFT> sift = SIFT::create(); std::vector<KeyPoint> kps1, kps2; Mat desc1, desc2; sift->detectAndCompute(img1, Mat(), kps1, desc1); sift->detectAndCompute(img2, Mat(), kps2, desc2); // 3) FLANN based matcher Ptr<FlannBasedMatcher> knnmatcher = FlannBasedMatcher::create(); std::vector<std::vector<DMatch> > matches; knnmatcher->knnMatch(desc1, desc2, matches, 2); // 4) filter matches using Lowe's distance ratio test std::vector<DMatch> good_matches; for (size_t i = 0; i < matches.size(); i++) { if (matches[i][0].distance < kRatioThresh*matches[i][1].distance) { good_matches.push_back(matches[i][0]); } } // 5) draw and show matches Mat img_matches; drawMatches(img1, kps1, img2, kps2, good_matches, img_matches); imshow("Good Matches", img_matches);
waitKey(); }
匹配效果對比如下:
3 應用示例
特征匹配 + 平面單應性,在計算機視覺中有很多應用,如:透視校正,目標定位等
3.1 透視校正
OpenCV 之 平面單應性 4.1 中的示例,并不是標準的透視校正,因為是人拿著標定板旋轉不同角度,使相機和標定板產生了相對的視角變換,而不是相機和整個場景之間
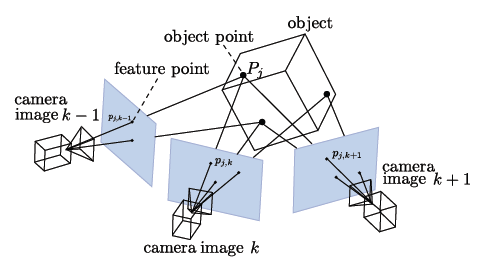
多視圖幾何中,嚴格意思的透視校正,是指相機在不同的視角下,對同一場景成不同的像而進行的視角校正,如下圖:
在得到匹配點對 good_matches 之后,再執行如下代碼,便可用于透視校正
// Localize the object std::vector<Point2f> obj; std::vector<Point2f> scene; for (size_t i = 0; i < good_matches.size(); i++) { // Get the keypoints from the good matches obj.push_back(kps1[good_matches[i].queryIdx].pt); scene.push_back(kps2[good_matches[i].trainIdx].pt); } // estimate H Mat H = findHomography(scene, obj, RANSAC); // warp scene Mat scene_warp; warpPerspective(img2, scene_warp, H, Size(1.35*img2.cols, img2.rows)); // show imshow("scene_warp", scene_warp);
校正前后的結果如下:

3.2 目標定位
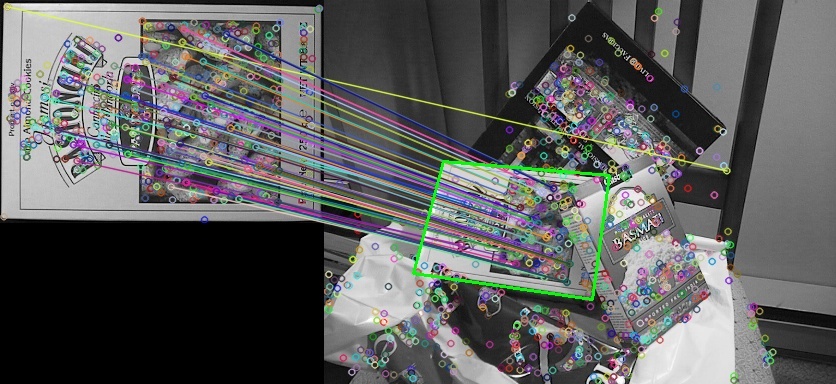
得到匹配點對 good_matches 后,再執行如下代碼,便可用于目標定位
// Localize the object std::vector<Point2f> obj; std::vector<Point2f> scene; for (size_t i = 0; i < good_matches.size(); i++) { // Get the keypoints from the good matches obj.push_back(kps1[good_matches[i].queryIdx].pt); scene.push_back(kps2[good_matches[i].trainIdx].pt); } // estimate H Mat H = findHomography(obj,scene, RANSAC); // get the corners from the image_1 ( the object to be "detected" ) std::vector<Point2f> obj_corners(4); obj_corners[0] = Point2f(0, 0); obj_corners[1] = Point2f((float)img1.cols, 0); obj_corners[2] = Point2f((float)img1.cols, (float)img1.rows); obj_corners[3] = Point2f(0, (float)img1.rows); std::vector<Point2f> scene_corners(4); perspectiveTransform(obj_corners, scene_corners, H); // draw lines between the corners (the mapped object in the scene - image_2 ) line(img_matches, scene_corners[0] + Point2f((float)img1.cols, 0), scene_corners[1] + Point2f((float)img1.cols, 0), Scalar(0,255,0)); line(img_matches, scene_corners[1] + Point2f((float)img1.cols, 0), scene_corners[2] + Point2f((float)img1.cols, 0), Scalar(0,255,0)); line(img_matches, scene_corners[2] + Point2f((float)img1.cols, 0), scene_corners[3] + Point2f((float)img1.cols, 0), Scalar(0,255,0)); line(img_matches, scene_corners[3] + Point2f((float)img1.cols, 0), scene_corners[0] + Point2f((float)img1.cols, 0), Scalar(0,255,0)); // show detected matches imshow("Object detection", img_matches);
目標定位結果如下:
參考資料
OpenCV-Python Tutorials / Feature Detection and Description / Feature Matching
OpenCV Tutorials / 2D Features framework (feature2d module) / Feature Matching with FLANN
OpenCV Tutorials / 2D Features framework (feature2d module) / Features2D + Homography to find a known object
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/293495.html
標籤:其他