一、簡介
這是總結的第一篇文章, 在學校期間做了不少的作品,專案,關于這個總結,我首先是寫一個簡單的教程,也不說簡單,我也是自學過來的,沒上過課,但是對于從最基本的51單片機(含開發板自己制作,并實作功能,然后實作老師的課平時成績優秀免聽,當然,51的知識也是歷史了),到stm32自學(直接入手機智云的物聯網平臺并結合原子哥視頻對比性學習),再到實時作業系統RT-Thread Nano 版本結合裸機開發完成多個訂單,到現在的更快、更強的RT-Thread Studio + CubeIDE 進行嵌入式實時作業系統RTOS 完整版本的開發,以及移植或添加各種軟體包開發,再到基于ubuntu18.04 + ROS Melodic 或ubuntu mate 20.04 + ROS Noetic 機器人開發,通過RT-Thread rosserial 與ROS 通信,完成機器人運動系統設計,以及短距離無線通信控制(NRF24L01 2.4G、zigbee、wifi 阿里云 物聯網平臺規則引擎等),越來越往嵌入式應用開發反方向發展了,當然,后面我主要以RTOS 及Linux應用開發方向發展,對于底層點的知識,用于應用開發中的性能優化,
當然我寫文章是寫給自己看的,使用塊參考讓文章看起來更舒服而已,
感謝你們看我的文章,我默認你們都有良好的基礎,文章不可能手把手教你,
二、接下來會總結的教程
內容挺多的,應該會分欄
現在的教程主要是 校園巡邏機器人
對于校園巡邏機器人,從畫圖設計,到材料的選擇,如鋁材歐標2020或歐標1020,電源(電動車電源),電機為輪毅電機(直流無刷電機),控制機,電路設計,軸座,軸承,甚至是螺絲釘、鋸條、螺絲刀等等,完全從想象到實作,
三、實作程序與成果
可行性 試驗,做了這個不起眼的巡邏機器人,基于RT-Thread開發,當時是時間緊,花了一兩天的時間,順便參加了嵌入式智能互聯大賽,得了個三等獎,證明專案可行
包括車和遙控器 第一次使用NRF24L01 還是很棒的
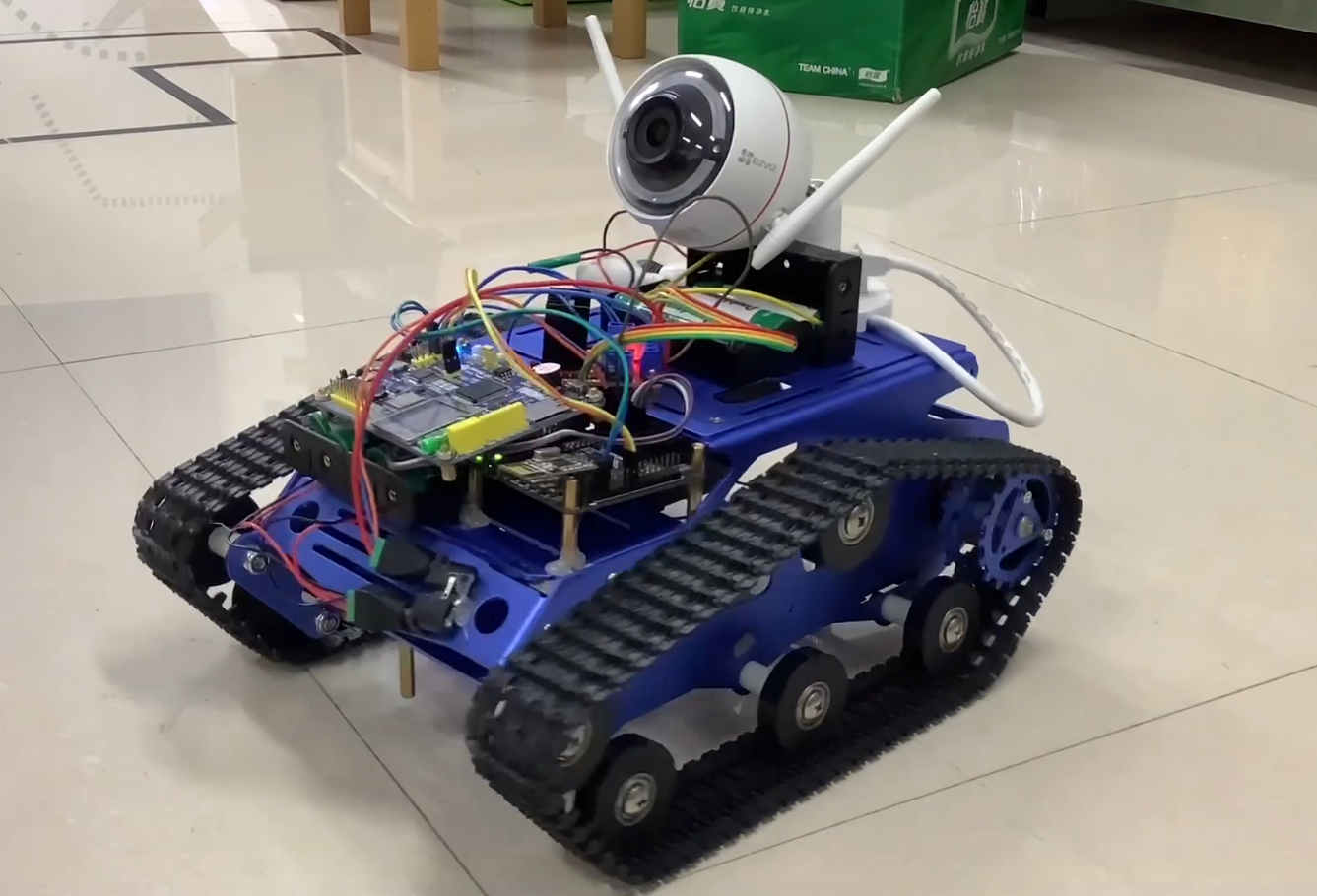
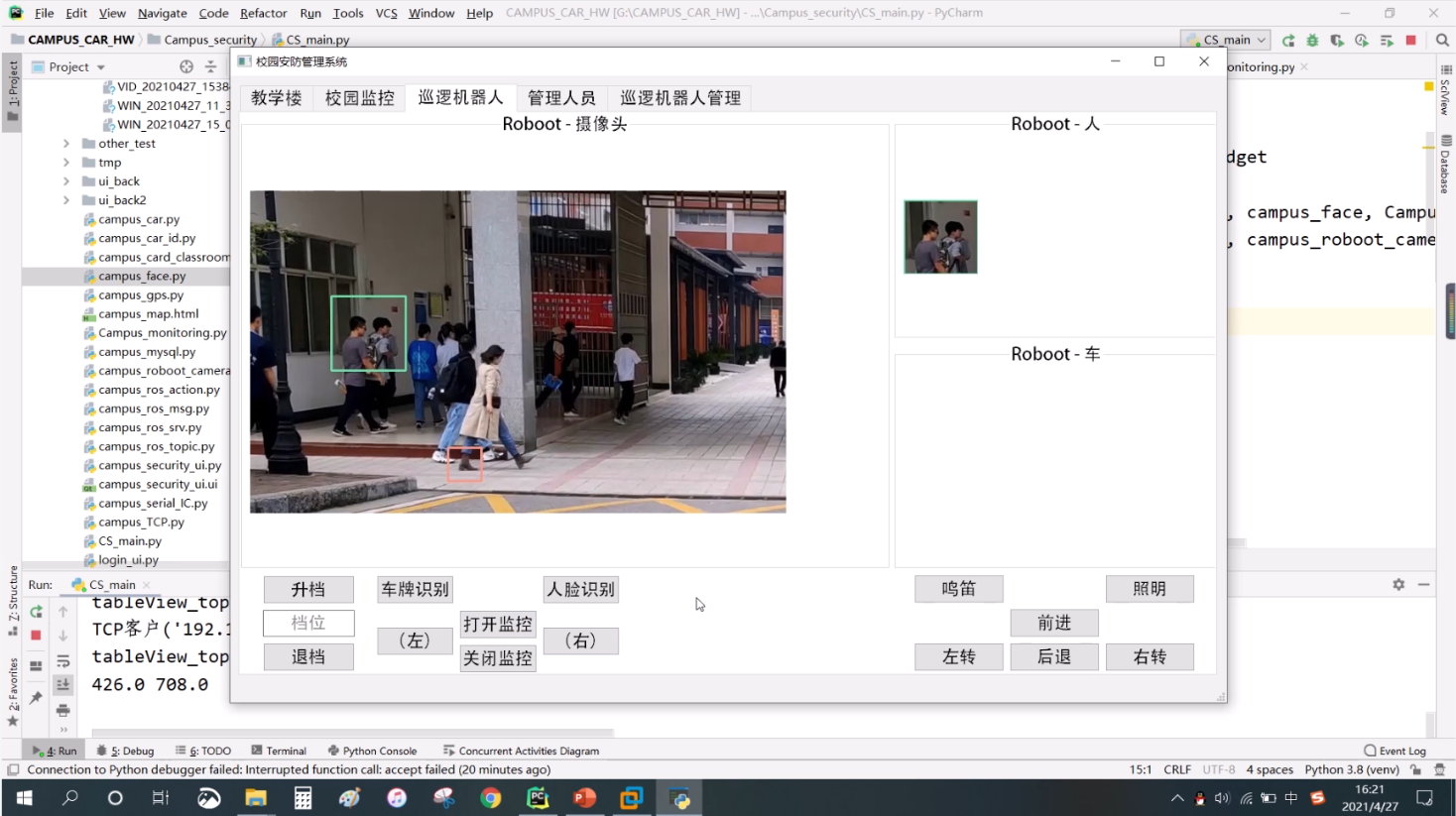
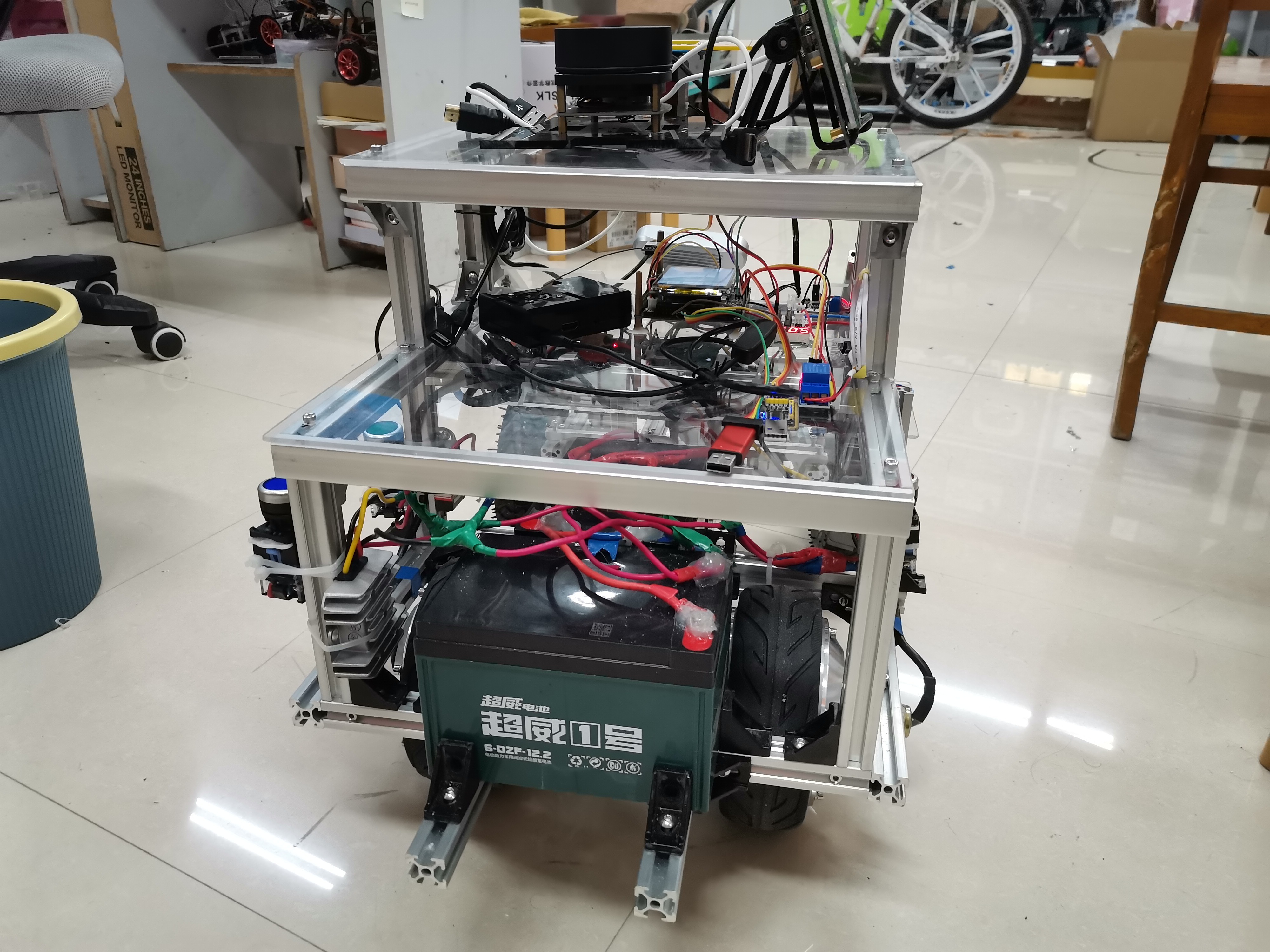
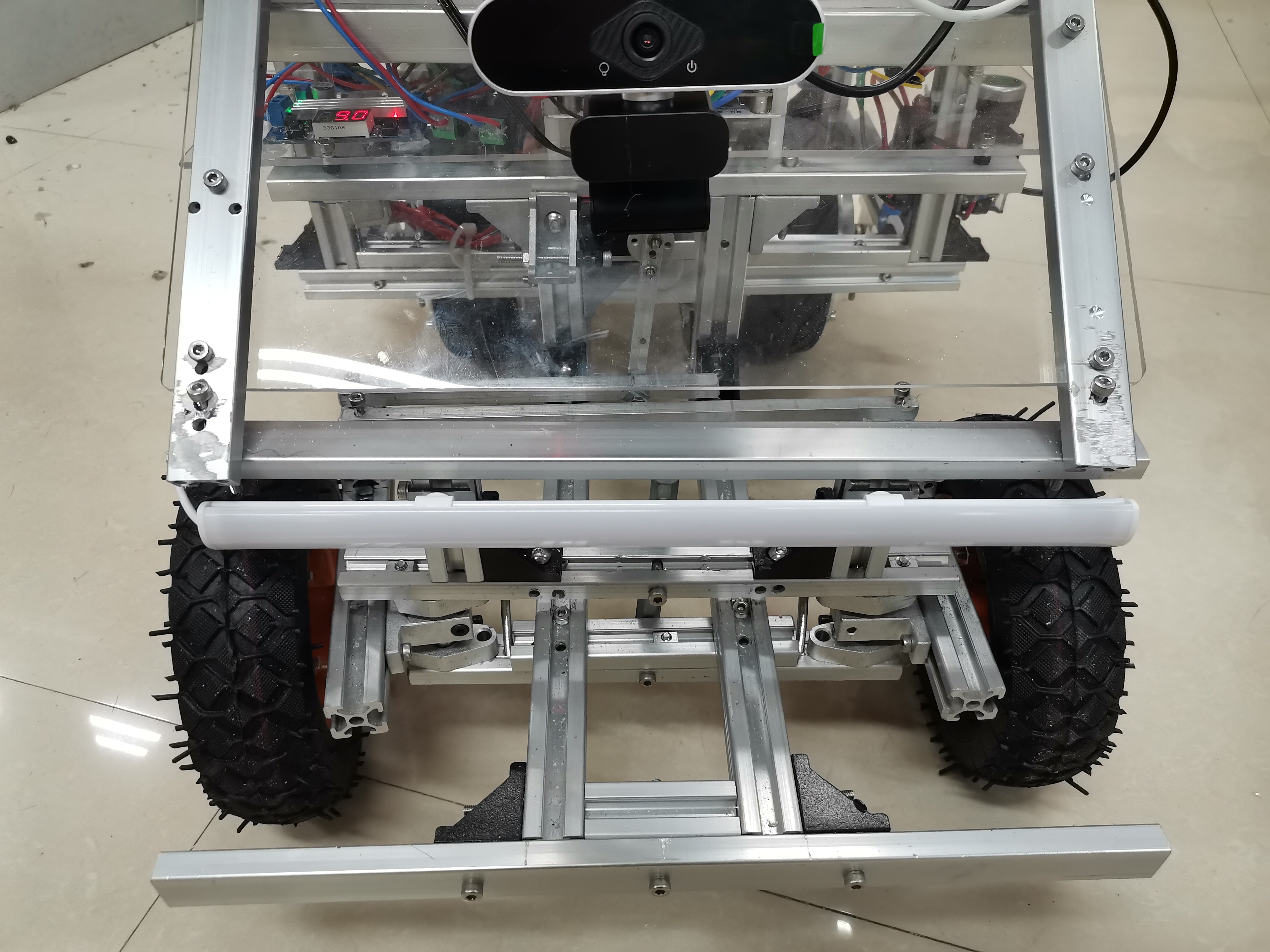
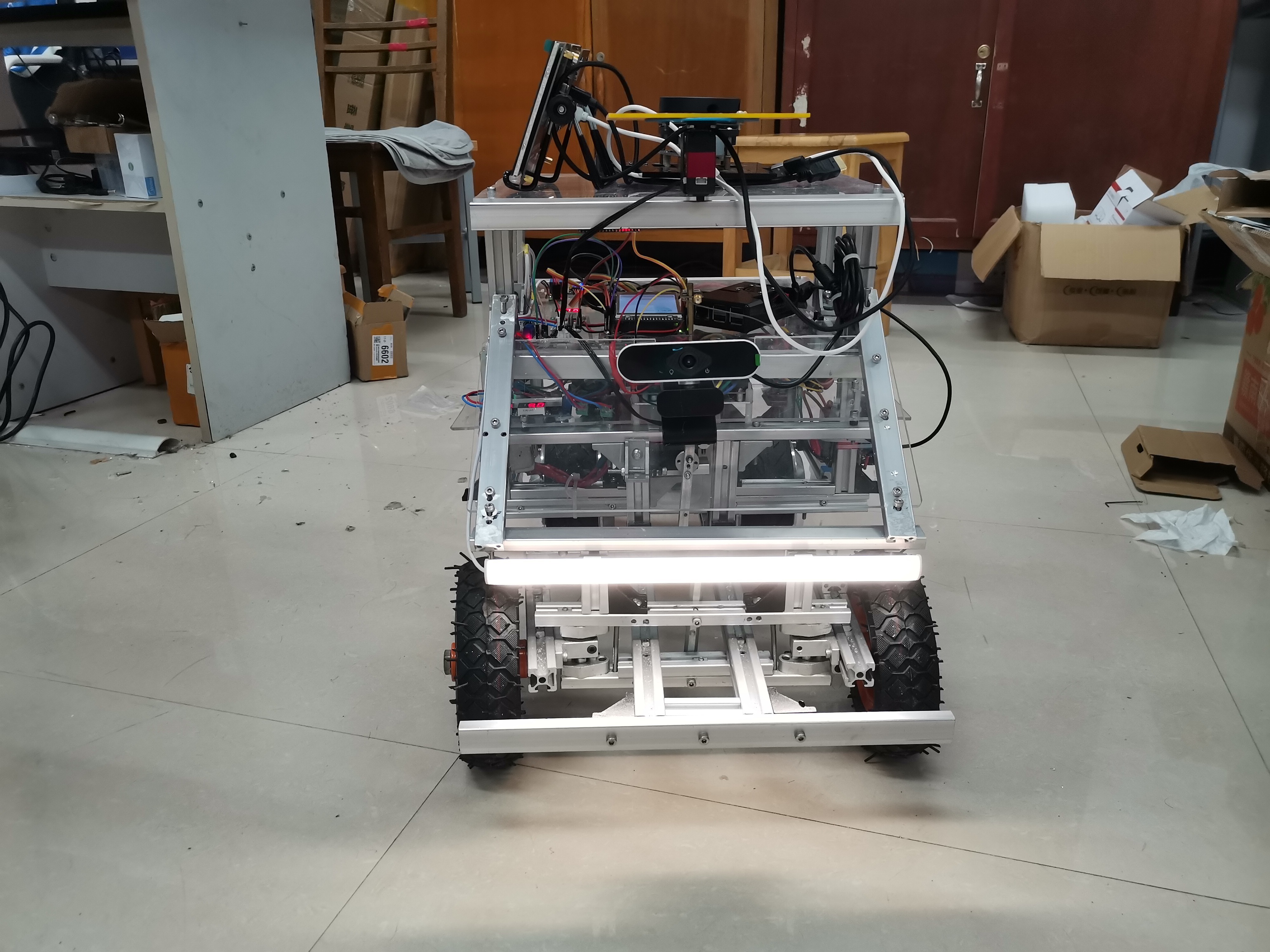
真正的專案開始了,是2021年4月份正式開始,包括材料購買與組裝以及代碼的編程,當然最困難的就是設計這個車的機械結構了,特別是實作阿克曼轉向,然后讓實驗室有了大車,而且不是三輪車,是四輪“汽車”,代碼花個一兩天就可以實作比較完美的控制了,這個車直到做出來,百分之80到90的時間花在車鋁材手工鋸切割以及安裝成車上,每個接件都是手工鋸鋸成或砂輪機打磨成,后來有慷訓用python給他寫了個上位機管理軟體,并在樹莓派上使用snowboy + 百度語音技術 開發了車載語音系統 ,
看圖


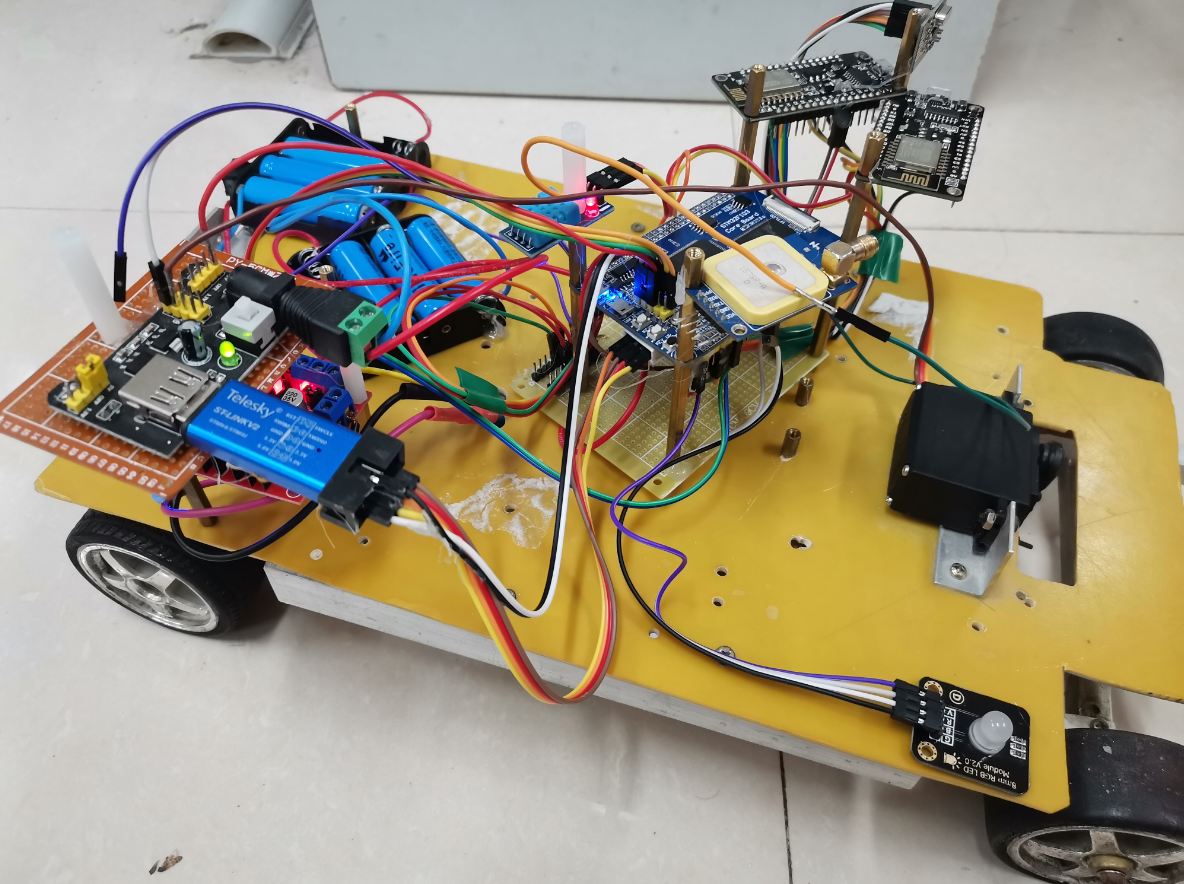
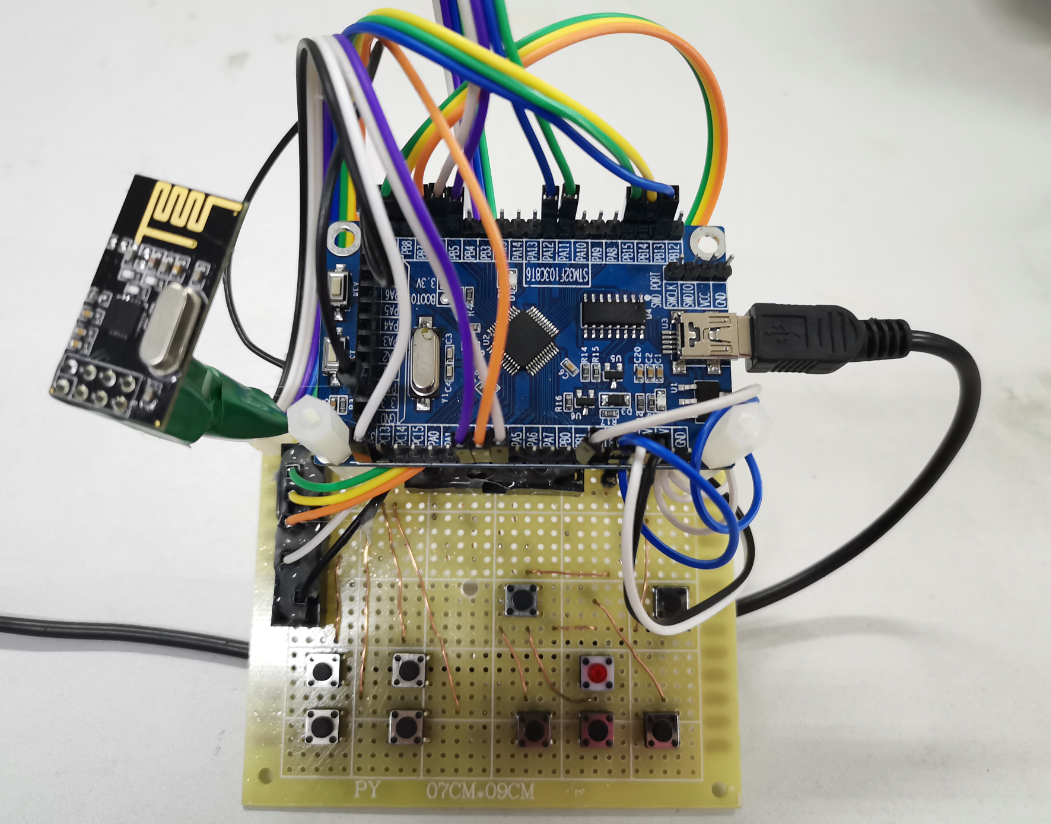
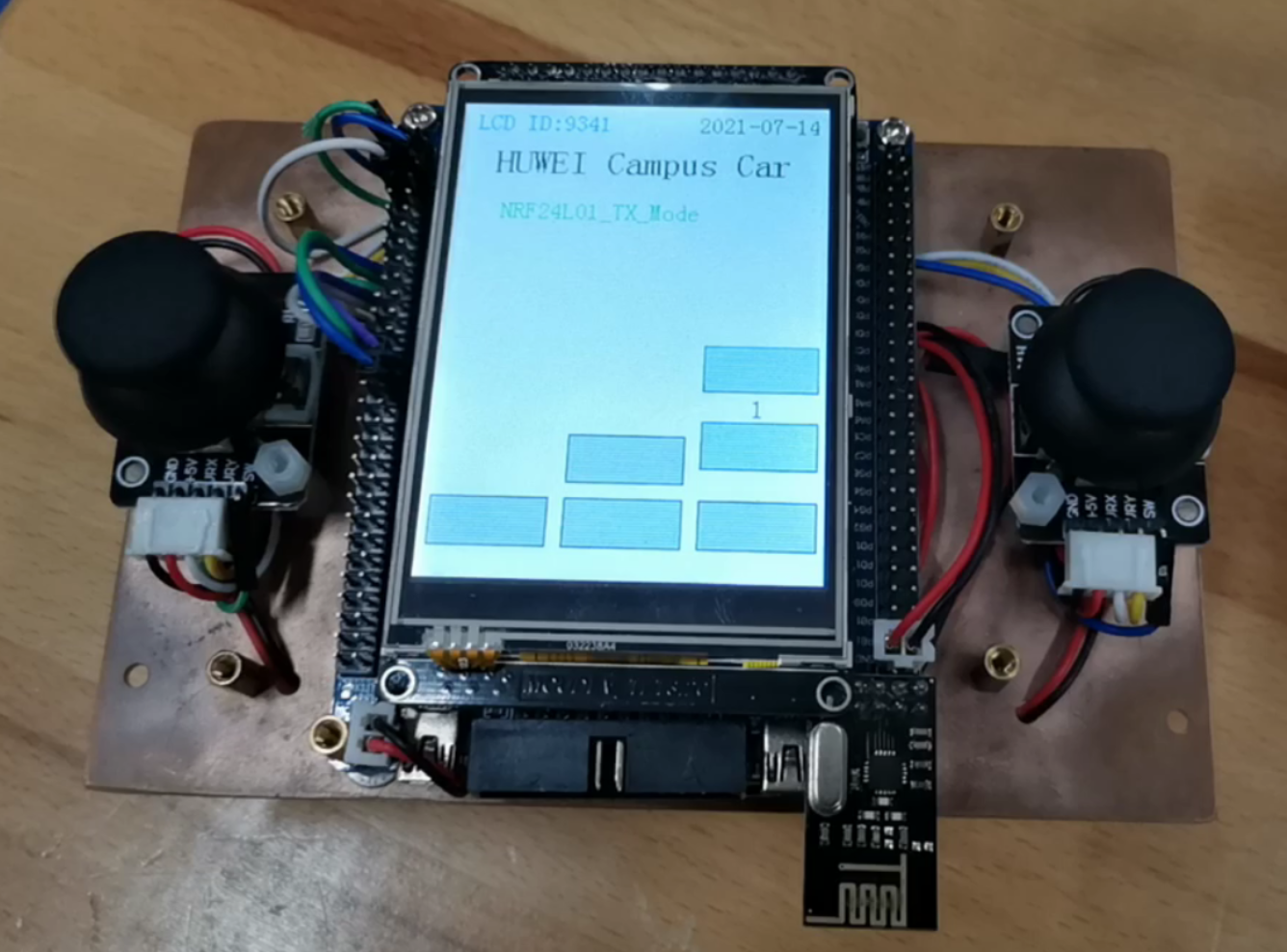
當然,中途還是在上課的(巡邏機器人都課間時間做的,包括通宵),而且有兩個課程都有課設,為了節約時間,我順便做了個玩具車同時結束了兩個課設(物聯網軟體設計nodejs + 阿里云、物聯網應用設計NRF24L01無線通信),也就是巡邏機器人的玩具版,當然還手工焊接了一個遙控器
如圖小車加遙控器,為了節約時間,布局比較隨意,當然,肯定是優秀啦
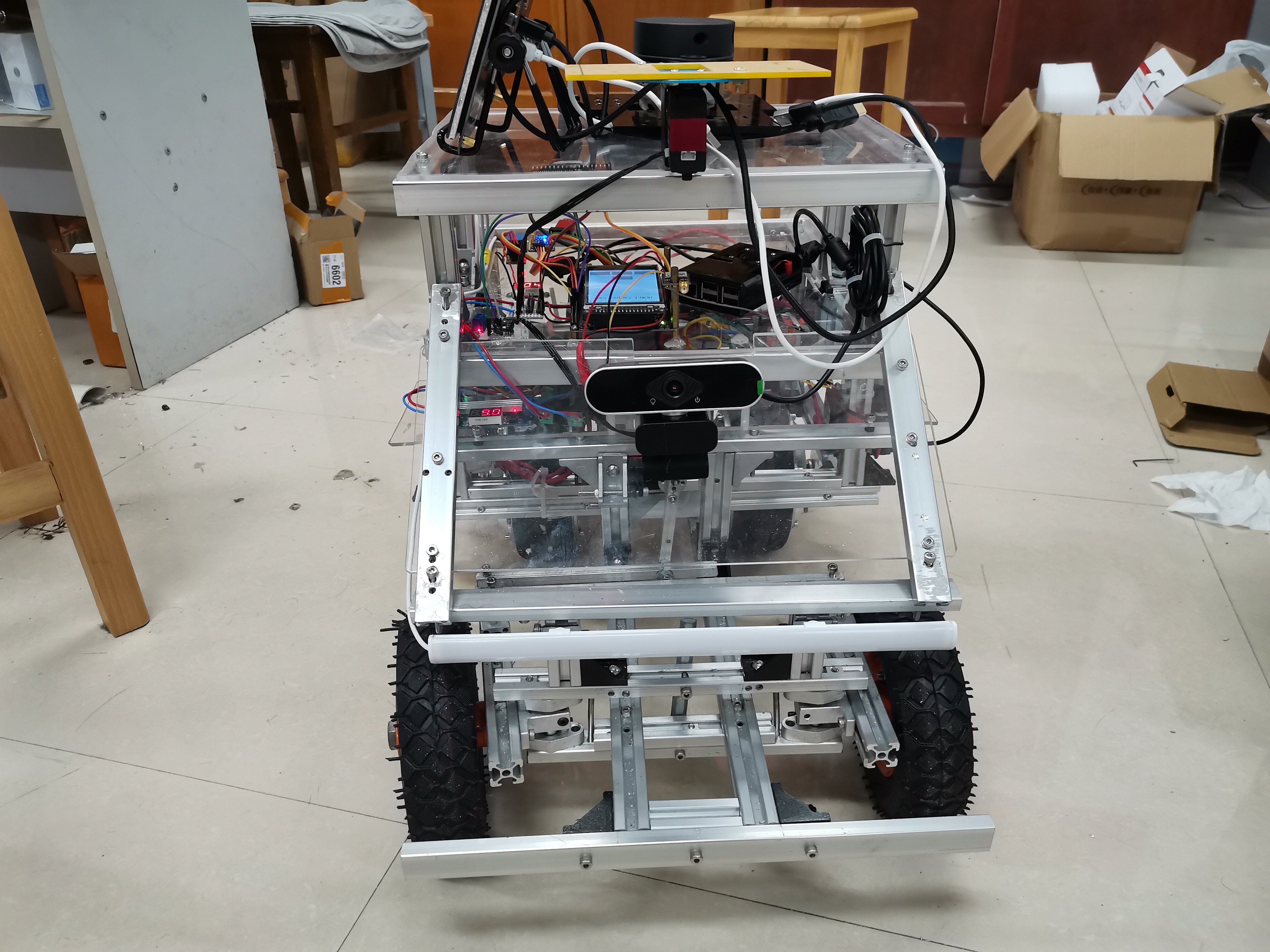
后來,為了能去比賽現場,以及更安全的自主導航,我在2021年7月份(考最后一科期末考試的前兩個晚上,我考的還不錯,就是切割鋁材、砂輪機磨鋁材的聲音影響了他們的期末復習,我又制作了一輛小型的巡邏機器人,花了兩三天時間把車做好,并使用CubeIDE + RT-Thread Nano寫了套簡單的代碼實作控制,含無線)
學期完后假期按計劃交替的進行著,不得不考慮校招了






四、取得的成就
這兩天是全國大學生計算機設計大賽人工智能實踐賽,該作品目前獲得全總決賽二等獎 ,下一步是爭取國一,
想想當時報名這個比賽的時候我一個人同時做了五個專案的一部分,其中三個為實驗室其他小組專案,如果當時集中火力只做自己的專案,應該國一已近到手了,
能力越大,責任越大,
希望未來317實驗室的你們能超越我,當然包括動手能力、編程能力、理論、課程、以及實驗室創辦的培養初心(三能三創),當然還有最重要的體育成績,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/294782.html
標籤:其他
下一篇:一、DC DC電源轉換電路設計