今天簡單測驗一下pytorch提供的模型
文章目錄
- 1. 使用訓練好的目標檢測網路
- 1.1 完整代碼
- 2. 使用訓練好的語意分割網路
- 2.1 完整代碼
1. 使用訓練好的目標檢測網路
import numpy as np
import torchvision
import torch
import torchvision.transforms as transforms
from PIL import Image, ImageDraw
import matplotlib.pyplot as plt
加載已經訓練好的ResNet-50-FPN結構的Fast RCNN模型
model = torchvision.models.detection.fasterrcnn_resnet50_fpn(pretrained=True)
查看網路結構
# 切換為測驗模式
model.eval()
model.modules
<bound method Module.modules of FasterRCNN(
(transform): GeneralizedRCNNTransform(
Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
Resize(min_size=(800,), max_size=1333, mode='bilinear')
)
(backbone): BackboneWithFPN(
(body): IntermediateLayerGetter(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): FrozenBatchNorm2d(64, eps=0.0)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): Bottleneck(
(conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(64, eps=0.0)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(64, eps=0.0)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(256, eps=0.0)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): FrozenBatchNorm2d(256, eps=0.0)
)
)
(1): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(64, eps=0.0)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(64, eps=0.0)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(256, eps=0.0)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(64, eps=0.0)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(64, eps=0.0)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(256, eps=0.0)
(relu): ReLU(inplace=True)
)
)
(layer2): Sequential(
(0): Bottleneck(
(conv1): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(128, eps=0.0)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(128, eps=0.0)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(512, eps=0.0)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): FrozenBatchNorm2d(512, eps=0.0)
)
)
(1): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(128, eps=0.0)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(128, eps=0.0)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(512, eps=0.0)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(128, eps=0.0)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(128, eps=0.0)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(512, eps=0.0)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(128, eps=0.0)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(128, eps=0.0)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(512, eps=0.0)
(relu): ReLU(inplace=True)
)
)
(layer3): Sequential(
(0): Bottleneck(
(conv1): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(512, 1024, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): FrozenBatchNorm2d(1024, eps=0.0)
)
)
(1): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
(4): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
(5): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(256, eps=0.0)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(256, eps=0.0)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(1024, eps=0.0)
(relu): ReLU(inplace=True)
)
)
(layer4): Sequential(
(0): Bottleneck(
(conv1): Conv2d(1024, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(512, eps=0.0)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(512, eps=0.0)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(2048, eps=0.0)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(1024, 2048, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): FrozenBatchNorm2d(2048, eps=0.0)
)
)
(1): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(512, eps=0.0)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(512, eps=0.0)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(2048, eps=0.0)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): FrozenBatchNorm2d(512, eps=0.0)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): FrozenBatchNorm2d(512, eps=0.0)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): FrozenBatchNorm2d(2048, eps=0.0)
(relu): ReLU(inplace=True)
)
)
)
(fpn): FeaturePyramidNetwork(
(inner_blocks): ModuleList(
(0): Conv2d(256, 256, kernel_size=(1, 1), stride=(1, 1))
(1): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1))
(2): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1))
(3): Conv2d(2048, 256, kernel_size=(1, 1), stride=(1, 1))
)
(layer_blocks): ModuleList(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
)
(extra_blocks): LastLevelMaxPool()
)
)
(rpn): RegionProposalNetwork(
(anchor_generator): AnchorGenerator()
(head): RPNHead(
(conv): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(cls_logits): Conv2d(256, 3, kernel_size=(1, 1), stride=(1, 1))
(bbox_pred): Conv2d(256, 12, kernel_size=(1, 1), stride=(1, 1))
)
)
(roi_heads): RoIHeads(
(box_roi_pool): MultiScaleRoIAlign(featmap_names=['0', '1', '2', '3'], output_size=(7, 7), sampling_ratio=2)
(box_head): TwoMLPHead(
(fc6): Linear(in_features=12544, out_features=1024, bias=True)
(fc7): Linear(in_features=1024, out_features=1024, bias=True)
)
(box_predictor): FastRCNNPredictor(
(cls_score): Linear(in_features=1024, out_features=91, bias=True)
(bbox_pred): Linear(in_features=1024, out_features=364, bias=True)
)
)
)>
dataroot = 'E:\學習\機器學習\資料集\VOC2012\VOCdevkit\VOC2012\JPEGImages\\2007_001526.jpg' # 這是一張五個黑人影像
image = Image.open(dataroot)
# image.show() # 會彈出影像
transform = transforms.Compose([ # 對影像進行變換
transforms.ToTensor()
])
image_t = transform(image) # 格式轉換
image_t.shape
torch.Size([3, 298, 500])
# 一般來說,需要增加維度,第0維度為batchsize
image_t = image_t.unsqueeze(0)
image_t.shape, image.size
(torch.Size([1, 3, 298, 500]), (500, 298))
pred = model(image_t)
pred
[{'boxes': tensor([[377.9250, 13.7037, 493.1622, 297.6194],
[287.2326, 23.5087, 387.5676, 298.0000],
[208.0055, 36.3203, 316.6268, 298.0000],
[ 99.1883, 42.3514, 215.3772, 293.5994],
[ 0.0000, 18.5004, 113.6753, 293.4090],
[103.1641, 89.9698, 120.0527, 106.6798],
[377.6761, 83.7355, 389.9832, 99.6203],
[186.2982, 87.3854, 227.7398, 111.3254],
[369.1582, 81.4083, 384.1546, 104.8596],
[104.1660, 80.9660, 192.0679, 223.8538],
[489.6611, 87.0265, 500.0000, 115.7063],
[205.3504, 81.7290, 227.3066, 88.7337],
[ 12.9033, 70.3410, 100.9079, 232.6088],
[334.8049, 16.4304, 448.6866, 298.0000],
[ 0.0000, 68.2807, 56.2474, 295.7907],
[359.0639, 79.0281, 378.9404, 104.2661],
[263.1891, 91.6502, 285.9006, 207.0223],
[488.7800, 83.5604, 498.6758, 93.8575],
[397.8902, 69.1296, 475.0887, 158.1689],
[213.1082, 83.5962, 296.4767, 203.5594],
[192.5514, 103.8455, 214.0233, 234.5641],
[108.1454, 83.0643, 165.9468, 166.2449],
[ 2.8212, 71.0566, 42.2922, 203.3171],
[186.8724, 90.9442, 209.4068, 106.2018],
[306.5388, 75.2656, 372.6170, 110.4899],
[312.3708, 70.4173, 364.8932, 133.3953],
[114.6884, 88.3139, 196.6803, 227.3148],
[272.4024, 96.7587, 287.4213, 188.5823],
[264.7156, 95.0346, 280.7938, 172.3812],
[372.4721, 175.0065, 388.3729, 199.5335],
[357.0051, 79.2724, 373.7537, 102.6262],
[ 87.1951, 80.9814, 104.0062, 114.8614],
[250.1311, 89.9769, 279.9026, 200.7932],
[206.3279, 81.9413, 227.7696, 88.9331],
[298.3614, 71.8469, 370.1693, 184.6290],
[348.6332, 79.9749, 387.5624, 105.4334],
[ 13.1942, 98.4261, 100.7580, 229.2718],
[486.5149, 94.5922, 495.3294, 116.6954],
[185.4654, 85.1627, 228.6101, 112.0963],
[193.6432, 107.3661, 213.1962, 234.7787],
[374.9436, 81.5935, 388.6273, 93.4102],
[369.7113, 81.8386, 386.0195, 105.9965],
[ 99.3100, 87.0634, 106.2750, 112.2665],
[194.8513, 108.2166, 212.0829, 232.3898],
[201.1373, 81.8559, 229.3789, 94.0905],
[ 19.8349, 185.0172, 90.2345, 237.0425],
[461.9336, 72.3364, 497.9980, 185.3475],
[ 90.3956, 112.8333, 111.5753, 243.3585]], grad_fn=<StackBackward>),
'labels': tensor([ 1, 1, 1, 1, 1, 3, 3, 3, 3, 27, 3, 3, 27, 1, 1, 3, 32, 3,
27, 27, 27, 27, 27, 3, 27, 27, 31, 32, 32, 31, 27, 3, 32, 8, 27, 3,
31, 3, 8, 31, 3, 8, 3, 32, 3, 31, 1, 27]),
'scores': tensor([0.9997, 0.9993, 0.9991, 0.9985, 0.9982, 0.9747, 0.9662, 0.9459, 0.9411,
0.7976, 0.7688, 0.7279, 0.7057, 0.6844, 0.6773, 0.6273, 0.5956, 0.4991,
0.4626, 0.3882, 0.3289, 0.3165, 0.2188, 0.1812, 0.1696, 0.1556, 0.1480,
0.1438, 0.1274, 0.1183, 0.1129, 0.1031, 0.0971, 0.0957, 0.0954, 0.0909,
0.0851, 0.0842, 0.0730, 0.0724, 0.0651, 0.0647, 0.0623, 0.0598, 0.0563,
0.0551, 0.0546, 0.0518], grad_fn=<IndexBackward>)}]
這里的輸出包含了3種值,分別是檢測到每個目標的邊界框(boxes)、目標的所屬類別(labels)、以及屬于相應類別的得分(scores),
print(" boxes.shape:{},\n labels.shape:{},\n scores.shape:{}\n".format(pred[0]['boxes'].shape, pred[0]['labels'].shape, pred[0]['scores'].shape))
boxes.shape:torch.Size([48, 4]),
labels.shape:torch.Size([48]),
scores.shape:torch.Size([48])
這張影像可以看出有48個結果輸出,但是只有前9個結果的預測置信度大于90%
# 首先定義每個類別所對應的標簽
COCO_INSTANCE_CATEGORY_NAMES = [
'__background__', 'person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus',
'train', 'truck', 'boat', 'traffic light', 'fire hydrant', 'N/A', 'stop sign',
'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
'elephant', 'bear', 'zebra', 'giraffe', 'N/A', 'backpack', 'umbrella', 'N/A', 'N/A',
'handbag', 'tie', 'suitcase', 'frisbee', 'skis', 'snowboard', 'sports ball',
'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard', 'tennis racket',
'bottle', 'N/A', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl',
'banana', 'apple', 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza',
'donut', 'cake', 'chair', 'couch', 'potted plant', 'bed', 'N/A', 'dining table',
'N/A', 'N/A', 'toilet', 'N/A', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'N/A', 'book',
'clock', 'vase', 'scissors', 'teddy bear', 'hair drier', 'toothbrush'
]
len(COCO_INSTANCE_CATEGORY_NAMES)
91
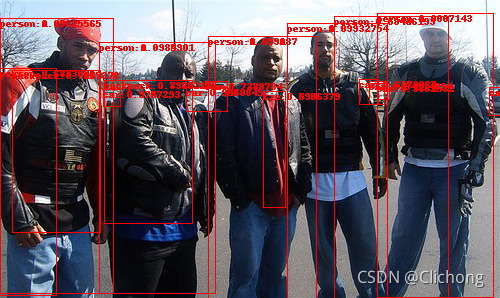
針對上述pred的預測結果,需要提取出有效資料,提取的資訊又每個目標的位置、類別、得分,然后將得分大于0.5的目標作為檢測到的有效目標,并將檢測到的目標在影像上顯示出來
# 使用name2label串列COCO_INSTANCE_CATEGORY_NAMES,提取labels對于的類別名稱
pred_class = [COCO_INSTANCE_CATEGORY_NAMES[i] for i in list(pred[0]['labels'].numpy())]
# 獲取對應的置信度分數
pred_score = list(pred[0]['scores'].detach().numpy())
# 獲取對應的目標預測檢測框
pred_boxes = [[box[0],box[1],box[2],box[3]] for box in list(pred[0]['boxes'].detach().numpy())]
# 提取置信度大于0.5的結果
pred_index = [pred_score.index(x) for x in pred_score if x > 0.5]
# 獲取到了對應索引:[0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16]
# 設定影像顯示字體
fontsize = np.int16(image.size[1]/30)
# 可視化影像.表示在原圖上添加一些元素
draw = ImageDraw.Draw(image)
for index in pred_index:
# 依次回去邊界框的坐標資訊
box = pred_boxes[index]
# 添加矩形框
draw.rectangle(box, outline="red")
# 矩陣框中標上: class:score的形式
texts = pred_class[index] + ":" + str(np.round(pred_score[index], 4))
# texts = pred_class[index] + ":" + str(format(pred_score[index], '.4f'))
# 在影像上的指定位置添加文本
draw.text((box[0], box[1]), texts, fill="red")
image
1.1 完整代碼
import numpy as np
import torchvision
import torch
import torchvision.transforms as transforms
from PIL import Image, ImageDraw
import matplotlib.pyplot as plt
# 首先定義每個類別所對應的標簽
COCO_INSTANCE_CATEGORY_NAMES = [
'__background__', 'person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus',
'train', 'truck', 'boat', 'traffic light', 'fire hydrant', 'N/A', 'stop sign',
'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
'elephant', 'bear', 'zebra', 'giraffe', 'N/A', 'backpack', 'umbrella', 'N/A', 'N/A',
'handbag', 'tie', 'suitcase', 'frisbee', 'skis', 'snowboard', 'sports ball',
'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard', 'tennis racket',
'bottle', 'N/A', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl',
'banana', 'apple', 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza',
'donut', 'cake', 'chair', 'couch', 'potted plant', 'bed', 'N/A', 'dining table',
'N/A', 'N/A', 'toilet', 'N/A', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'N/A', 'book',
'clock', 'vase', 'scissors', 'teddy bear', 'hair drier', 'toothbrush'
]
# 現在將其包裝成一個函式
def Object_Dection(model, imagepath, COCO_INSTANCE_CATEGORY_NAMES):
# 打卡影像
image = Image.open(imagepath)
# image.show() # 會彈出影像
transform = transforms.Compose([ # 對影像進行變換
transforms.ToTensor()
])
image_t = transform(image) # 格式轉換
# 增維
image_t = image_t.unsqueeze(0)
pred = model(image_t)
# 使用name2label串列COCO_INSTANCE_CATEGORY_NAMES,提取labels對于的類別名稱
pred_class = [COCO_INSTANCE_CATEGORY_NAMES[i] for i in list(pred[0]['labels'].numpy())]
# 獲取對應的置信度分數
pred_score = list(pred[0]['scores'].detach().numpy())
# 獲取對應的目標預測檢測框
pred_boxes = [[box[0], box[1], box[2], box[3]] for box in list(pred[0]['boxes'].detach().numpy())]
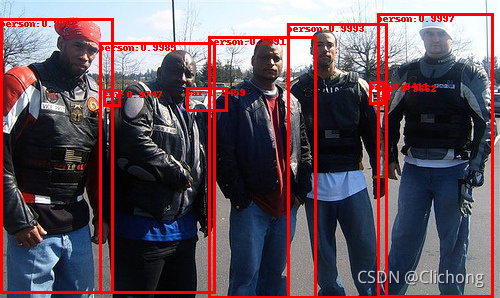
# 提取置信度大于0.8的結果
pred_index = [pred_score.index(x) for x in pred_score if x > 0.8]
# 設定影像顯示字體
# fontsize = np.int16(image.size[1]/30)
# font = ImageFont.truetype("/Library/Fonts/華文細黑.ttf", fontsize)
# 在原圖上添加資訊
draw = ImageDraw.Draw(image)
for index in pred_index:
# 依次回去邊界框的坐標資訊
box = pred_boxes[index]
# 添加矩形框
draw.rectangle(box, outline="red", width=3)
# 矩陣框中標上: class:score的形式
texts = pred_class[index] + ":" + str(np.round(pred_score[index], 4))
# texts = pred_class[index] + ":" + str(format(pred_score[index], '.4f'))
# 在影像上的指定位置添加文本
draw.text((box[0], box[1]), texts, fill="red")
return image
# 測驗
if __name__ == '__main__':
# 加載模型
model = torchvision.models.detection.fasterrcnn_resnet50_fpn(pretrained=True)
# 切換為測驗模式
model.eval()
imagepath = 'E:\學習\機器學習\資料集\VOC2012\VOCdevkit\VOC2012\JPEGImages\\2007_001526.jpg'
image = Object_Dection(model, imagepath, COCO_INSTANCE_CATEGORY_NAMES)
# 顯示影像
image.show()
結果展示:
2. 使用訓練好的語意分割網路
# 加載模型
model = torchvision.models.segmentation.fcn_resnet101(pretrained=True)
model.eval()
imagepath = 'E:\學習\機器學習\資料集\VOC2012\VOCdevkit\VOC2012\JPEGImages\\2007_001526.jpg'
image = Image.open(imagepath)
# 對影像進行變換
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225])
])
image_t = transform(image)
image_t = image_t.unsqueeze(0)
pred = model(image_t)
image_t.shape
torch.Size([1, 3, 298, 500])
pred
OrderedDict([('out',
tensor([[[[10.7415, 10.7415, 10.7415, ..., 9.5000, 9.5000, 9.5000],
[10.7415, 10.7415, 10.7415, ..., 9.5000, 9.5000, 9.5000],
[10.7415, 10.7415, 10.7415, ..., 9.5000, 9.5000, 9.5000],
...,
[ 7.4524, 7.4524, 7.4524, ..., 9.5723, 9.5723, 9.5723],
[ 7.4524, 7.4524, 7.4524, ..., 9.5723, 9.5723, 9.5723],
[ 7.4524, 7.4524, 7.4524, ..., 9.5723, 9.5723, 9.5723]],
[[-1.6881, -1.6881, -1.6881, ..., -0.0993, -0.0993, -0.0993],
[-1.6881, -1.6881, -1.6881, ..., -0.0993, -0.0993, -0.0993],
[-1.6881, -1.6881, -1.6881, ..., -0.0993, -0.0993, -0.0993],
...,
[-1.4228, -1.4228, -1.4228, ..., -0.1377, -0.1377, -0.1377],
[-1.4228, -1.4228, -1.4228, ..., -0.1377, -0.1377, -0.1377],
[-1.4228, -1.4228, -1.4228, ..., -0.1377, -0.1377, -0.1377]],
[[-2.3719, -2.3719, -2.3719, ..., -1.8977, -1.8977, -1.8977],
[-2.3719, -2.3719, -2.3719, ..., -1.8977, -1.8977, -1.8977],
[-2.3719, -2.3719, -2.3719, ..., -1.8977, -1.8977, -1.8977],
...,
[-0.8262, -0.8262, -0.8262, ..., -1.6540, -1.6540, -1.6540],
[-0.8262, -0.8262, -0.8262, ..., -1.6540, -1.6540, -1.6540],
[-0.8262, -0.8262, -0.8262, ..., -1.6540, -1.6540, -1.6540]],
...,
[[-0.5688, -0.5688, -0.5688, ..., -0.9008, -0.9008, -0.9008],
[-0.5688, -0.5688, -0.5688, ..., -0.9008, -0.9008, -0.9008],
[-0.5688, -0.5688, -0.5688, ..., -0.9008, -0.9008, -0.9008],
...,
[ 0.4994, 0.4994, 0.4994, ..., 1.4651, 1.4651, 1.4651],
[ 0.4994, 0.4994, 0.4994, ..., 1.4651, 1.4651, 1.4651],
[ 0.4994, 0.4994, 0.4994, ..., 1.4651, 1.4651, 1.4651]],
[[-0.4391, -0.4391, -0.4391, ..., 2.3527, 2.3527, 2.3527],
[-0.4391, -0.4391, -0.4391, ..., 2.3527, 2.3527, 2.3527],
[-0.4391, -0.4391, -0.4391, ..., 2.3527, 2.3527, 2.3527],
...,
[ 0.1844, 0.1844, 0.1844, ..., 1.2322, 1.2322, 1.2322],
[ 0.1844, 0.1844, 0.1844, ..., 1.2322, 1.2322, 1.2322],
[ 0.1844, 0.1844, 0.1844, ..., 1.2322, 1.2322, 1.2322]],
[[ 1.3879, 1.3879, 1.3879, ..., 0.9153, 0.9153, 0.9153],
[ 1.3879, 1.3879, 1.3879, ..., 0.9153, 0.9153, 0.9153],
[ 1.3879, 1.3879, 1.3879, ..., 0.9153, 0.9153, 0.9153],
...,
[-0.0281, -0.0281, -0.0281, ..., 0.4544, 0.4544, 0.4544],
[-0.0281, -0.0281, -0.0281, ..., 0.4544, 0.4544, 0.4544],
[-0.0281, -0.0281, -0.0281, ..., 0.4544, 0.4544, 0.4544]]]],
grad_fn=<UpsampleBilinear2DBackward1>)),
('aux',
tensor([[[[ 9.7964, 9.7964, 9.7964, ..., 8.7053, 8.7053, 8.7053],
[ 9.7964, 9.7964, 9.7964, ..., 8.7053, 8.7053, 8.7053],
[ 9.7964, 9.7964, 9.7964, ..., 8.7053, 8.7053, 8.7053],
...,
[ 6.6633, 6.6633, 6.6633, ..., 8.1096, 8.1096, 8.1096],
[ 6.6633, 6.6633, 6.6633, ..., 8.1096, 8.1096, 8.1096],
[ 6.6633, 6.6633, 6.6633, ..., 8.1096, 8.1096, 8.1096]],
[[-1.0417, -1.0417, -1.0417, ..., -0.4245, -0.4245, -0.4245],
[-1.0417, -1.0417, -1.0417, ..., -0.4245, -0.4245, -0.4245],
[-1.0417, -1.0417, -1.0417, ..., -0.4245, -0.4245, -0.4245],
...,
[-1.3747, -1.3747, -1.3747, ..., -0.0461, -0.0461, -0.0461],
[-1.3747, -1.3747, -1.3747, ..., -0.0461, -0.0461, -0.0461],
[-1.3747, -1.3747, -1.3747, ..., -0.0461, -0.0461, -0.0461]],
[[-1.8145, -1.8145, -1.8145, ..., -1.1215, -1.1215, -1.1215],
[-1.8145, -1.8145, -1.8145, ..., -1.1215, -1.1215, -1.1215],
[-1.8145, -1.8145, -1.8145, ..., -1.1215, -1.1215, -1.1215],
...,
[-0.3710, -0.3710, -0.3710, ..., -0.8807, -0.8807, -0.8807],
[-0.3710, -0.3710, -0.3710, ..., -0.8807, -0.8807, -0.8807],
[-0.3710, -0.3710, -0.3710, ..., -0.8807, -0.8807, -0.8807]],
...,
[[ 0.6499, 0.6499, 0.6499, ..., -0.0127, -0.0127, -0.0127],
[ 0.6499, 0.6499, 0.6499, ..., -0.0127, -0.0127, -0.0127],
[ 0.6499, 0.6499, 0.6499, ..., -0.0127, -0.0127, -0.0127],
...,
[ 0.6200, 0.6200, 0.6200, ..., 0.3854, 0.3854, 0.3854],
[ 0.6200, 0.6200, 0.6200, ..., 0.3854, 0.3854, 0.3854],
[ 0.6200, 0.6200, 0.6200, ..., 0.3854, 0.3854, 0.3854]],
[[-0.6026, -0.6026, -0.6026, ..., 1.1884, 1.1884, 1.1884],
[-0.6026, -0.6026, -0.6026, ..., 1.1884, 1.1884, 1.1884],
[-0.6026, -0.6026, -0.6026, ..., 1.1884, 1.1884, 1.1884],
...,
[-0.8764, -0.8764, -0.8764, ..., 0.7393, 0.7393, 0.7393],
[-0.8764, -0.8764, -0.8764, ..., 0.7393, 0.7393, 0.7393],
[-0.8764, -0.8764, -0.8764, ..., 0.7393, 0.7393, 0.7393]],
[[ 1.3283, 1.3283, 1.3283, ..., 1.2738, 1.2738, 1.2738],
[ 1.3283, 1.3283, 1.3283, ..., 1.2738, 1.2738, 1.2738],
[ 1.3283, 1.3283, 1.3283, ..., 1.2738, 1.2738, 1.2738],
...,
[-0.7884, -0.7884, -0.7884, ..., -0.2274, -0.2274, -0.2274],
[-0.7884, -0.7884, -0.7884, ..., -0.2274, -0.2274, -0.2274],
[-0.7884, -0.7884, -0.7884, ..., -0.2274, -0.2274, -0.2274]]]],
grad_fn=<UpsampleBilinear2DBackward1>))])
pred['out'].shape, pred['aux'].shape
(torch.Size([1, 21, 298, 500]), torch.Size([1, 21, 298, 500]))
output = pred['out'].squeeze()
output.shape
torch.Size([21, 298, 500])
# 獲取21類中自信度最高的哪一類,作為像素點的類; 從而實作將3維矩陣變換為二維矩陣
# 現在該二維矩陣中每個取值均代表影像中對應位置像素點的預測類別
outputarg = torch.argmax(output, dim=0).numpy()
outputarg.shape
(298, 500)
# 將像素值的每個預測類別分別編碼為不同的顏色,然后將影像可視化
def decode_segmaps(image, label_colors, nc=21):
# 函式將輸出的2D影像,會將不同類編碼為不同的顏色
r = np.zeros_like(image).astype(np.uint8)
g = np.zeros_like(image).astype(np.uint8)
b = np.zeros_like(image).astype(np.uint8)
print(r.shape, g.shape, b.shape) # (298, 500) (298, 500) (298, 500)
for cls in range(0, nc):
idx = (image==cls)
print("cls:{}, idx.shape:{}".format(cls, idx.shape))
r[idx] = label_colors[cls][0]
g[idx] = label_colors[cls][1]
b[idx] = label_colors[cls][2]
rgbimage = np.stack([r,g,b], axis=2)
return rgbimage
# 指定顏色編碼
label_colors = np.array([
(0,0,0),
(128,0,0),(0,128,0),(128,128,0),(0,0,128),(128,0,128),
(0,128,128),(128,128,128),(64,0,0),(192,0,0),(64,128,0),
(192,128,0),(64,0,128),(192,0,128),(64,128,128),(192,128,128),
(0,64,64),(128,64,0),(0,192,0),(128,192,0),(0,64,128)
])
outputrgb = decode_segmaps(outputarg, label_colors)
outputrgb.shape
(298, 500) (298, 500) (298, 500)
(298, 500, 3)
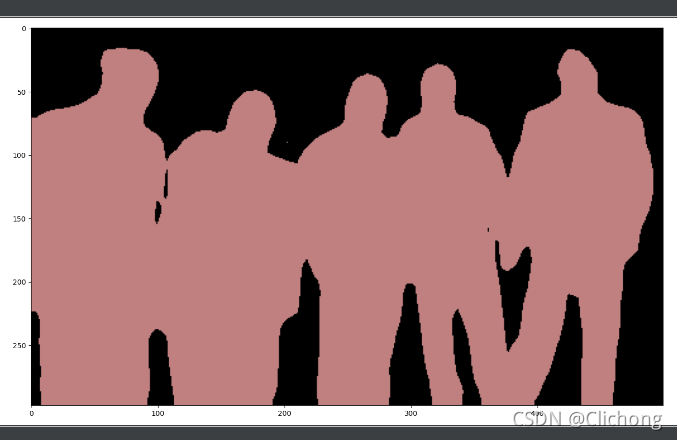
plt.figure(figsize=(20,8))
plt.subplot(1,1,1)
plt.imshow(outputrgb)
<matplotlib.image.AxesImage at 0x154ee811848>

2.1 完整代碼
import numpy as np
import torchvision
import torch
import torchvision.transforms as transforms
from PIL import Image, ImageDraw
import matplotlib.pyplot as plt
# 指定顏色編碼:一共21類,每一類對應一個顏色編碼
label_colors = np.array([
(0,0,0),
(128,0,0),(0,128,0),(128,128,0),(0,0,128),(128,0,128),
(0,128,128),(128,128,128),(64,0,0),(192,0,0),(64,128,0),
(192,128,0),(64,0,128),(192,0,128),(64,128,128),(192,128,128),
(0,64,64),(128,64,0),(0,192,0),(128,192,0),(0,64,128)
])
# 將像素值的每個預測類別分別編碼為不同的顏色,然后將影像可視化
def decode_segmaps(image, label_colors, nc=21):
# 函式將輸出的2D影像,會將不同類編碼為不同的顏色
r = np.zeros_like(image).astype(np.uint8)
g = np.zeros_like(image).astype(np.uint8)
b = np.zeros_like(image).astype(np.uint8)
# print(r.shape, g.shape, b.shape) # (298, 500) (298, 500) (298, 500)
# 回圈遍歷每一層(一共21層),當第cls類出現在image的某些像素值時,這些點索引為idx
for cls in range(0, nc):
idx = (image == cls)
# print("cls:{}, idx.shape:{}".format(cls, idx.shape))
# 構造rgb三通道:本來是一個類別點變成一個像素(3通道)
r[idx] = label_colors[cls][0]
g[idx] = label_colors[cls][1]
b[idx] = label_colors[cls][2]
# 三個通道拼接獲取彩色影像
rgbimage = np.stack([r, g, b], axis=2)
return rgbimage
# 功能: 輸入影像路徑,輸出分割影像
def Semantic_Segmentation(model, imagepath, label_colors):
# 獲取圖片
image = Image.open(imagepath)
# 對影像進行變換
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225])
])
image_t = transform(image)
# 增維
image_t = image_t.unsqueeze(0)
pred = model(image_t)
# pred['out'].shape, pred['aux'].shape
# (torch.Size([1, 21, 298, 500]), torch.Size([1, 21, 298, 500]))
# 獲取像素點值并降維
output = pred['out'].squeeze()
# 獲取21類中自信度最高的哪一類,作為像素點的類; 從而實作將3維矩陣變換為二維矩陣
# 現在該二維矩陣中每個取值均代表影像中對應位置像素點的預測類別
outputarg = torch.argmax(output, dim=0).numpy()
# 類別通道轉換成顏色通道,轉換成一張rgb影像
outputrgb = decode_segmaps(outputarg, label_colors)
# 繪制影像
plt.figure(figsize=(20, 8))
plt.subplot(1, 1, 1)
plt.imshow(outputrgb)
plt.show()
# 測驗
if __name__ == '__main__':
# 加載模型
model = torchvision.models.segmentation.fcn_resnet101(pretrained=True)
model.eval()
imagepath = 'E:\學習\機器學習\資料集\VOC2012\VOCdevkit\VOC2012\JPEGImages\\2007_001526.jpg'
Semantic_Segmentation(model, imagepath, label_colors)
結果輸出:
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/301376.html
標籤:其他