一、代碼
close all;
clc;
% 讀取影像資訊(原圖為灰度圖)
img = imread('lena.bmp');
[m,n] = size(img);
% 先在原圖外圍擴展一圈
tmp = zeros(m+2,n+2);
tmp(2:m+1,2:n+1) = img;
% 初始化各一階偏導矩陣
Ix = zeros(m+2,n+2);
Iy = zeros(m+2,n+2);
E = zeros(m+2,n+2);
% 求偏導
Ix(:,2:n) = tmp(:,3:n+1) - tmp(:,1:n-1);
Iy(2:m,:) = tmp(3:m+1,:) - tmp(1:m-1,:);
Ix2 = Ix(2:m+1,2:n+1) .^ 2;
Iy2 = Iy(2:m+1,2:n+1) .^ 2;
Ixy = Ix(2:m+1,2:n+1) .* Iy(2:m+1,2:n+1);
%生成高斯卷積核,便于對Ix2、Iy2、Ixy進行平滑
% sigma = 2
h = fspecial('gaussian',[3 3],2);
Ix2 = filter2(h,Ix2);
Iy2 = filter2(h,Iy2);
Ixy = filter2(h,Ixy);
% 初始化Rmax
Rmax = 0;
R = zeros(m,n);
for i = 1 : m
for j = 1 : n
M = [Ix2(i,j) Ixy(i,j);
Ixy(i,j) Iy2(i,j)];
R(i,j) = det(M) - 0.06 * (trace(M))^2;
if R(i,j) > Rmax
Rmax = R(i,j);
end
end
end
% 顯示影像
imshow(img);
title('角點檢測');
hold on;
% 求角點
tmp(2:m+1,2:n+1) = R;
result = zeros(m+2,n+2);
result(2:m+1,2:n+1) = img;
for i = 2 : m + 1
for j = 2 : n + 1
% 閾值為0.02*Rmax
% 認為R值大于閾值的點為角點
% 求當前像素點的鄰域
current = [tmp(i-1,j-1) tmp(i-1,j) tmp(i-1,j+1);
tmp(i,j-1) tmp(i,j) tmp(i,j+1);
tmp(i+1,j-1) tmp(i+1,j) tmp(i+1,j+1)];
% 若當前像素點的R值大于閾值且它是其八鄰域中R值最大的點,則它為角點
if tmp(i,j) >= 0.02 * Rmax && tmp(i,j) >= max(max(current))
result(i,j) = 255;
% plot繪制點的時候是以左上角為原點,水平向右為x正半軸軸,豎直向下為y正半軸
% 這和我們對于影像矩陣坐標的直觀印象恰好相反
plot(j,i,'go')
end
end
end
% 這是測驗plot繪制點的代碼
% for i = 1 : m
% for j = 1 : n
% plot(i,j,'b+');
% pause;
% end
% end
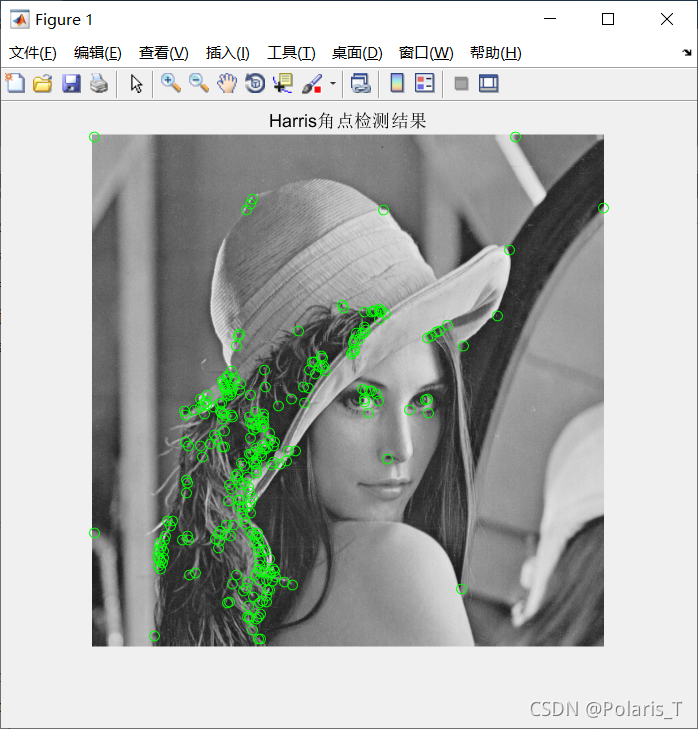
二、結果
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/333522.html
標籤:其他
上一篇:opencv人臉識別