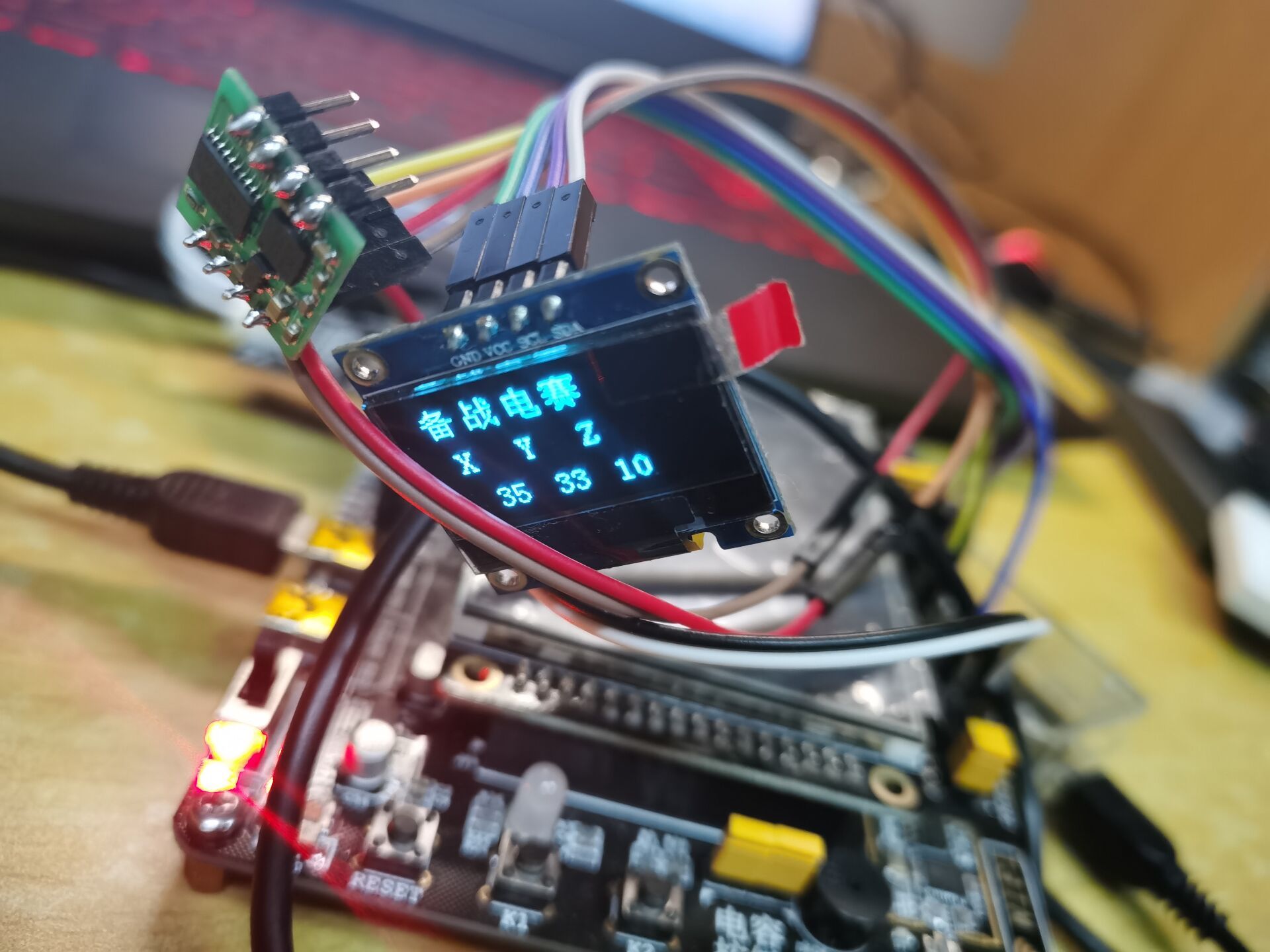
之前學習I2C時嘗試實作OLED顯示電機速度以觀測pid的功能,但受困于難以在OLED上實時更新數字,最終只能做到顯示一些圖片或漢字,今天結合野火和正點原子的資料,融合二者的代碼,實作了在0.96i2c四針螢屏上實時顯示JY61反饋角度的功能,
有點懶,還是先記一下代碼,過幾天空閑了添加解讀,方便以后復習,
主函式:
/**
******************************************************************************
* @author YCHEN
* @version V1.5
* @date 2021-10-24
* @brief 備戰電賽
******************************************************************************
*
* 型號 :STM32F103VET6
* 博客 :https://blog.csdn.net/YANGCHEN144?spm=1000.2115.3001.5343
* 參考資料 :野火教程
* 程式功能 :
1.LED燈
2.配置了USART1,USART2,USART3,其中1用來與JY61通信,2用來監視串口
3.200ms的定時
4.兩個按鍵中斷
5.加入了OLED顯示角度系統
******************************************************************************
*/
#include "stm32f10x.h"
#include "bsp_led.h"
#include "./usart/bsp_usart.h"
#include <string.h>
#include <stdio.h>
#include "./JY61/JY61.h"
#include "./TimBase/bsp_TiMbase.h"
#include "./EXTI/bsp_exti.h"
#include "./SysTick/bsp_SysTick.h"
//#include "./oled/OLED_I2C.h"
#include "./sys/sys.h"
#include "./oled/oled.h"
#define SOFT_DELAY Delay(0x00FFFF);
void Delay(__IO u32 nCount);
struct SAcc stcAcc;
struct SGyro stcGyro;
struct SAngle stcAngle;
//用串口1給JY模塊發送指令
void sendcmd(char cmd[])
{
char i;
for(i=0;i<3;i++)
UART1_Put_Char(cmd[i]);
}
void sendcmd5(char cmd[])
{
char i;
for(i=0;i<10;i++)
UART1_Put_Char(cmd[i]);
}
//CopeSerialData為串口2中斷呼叫函式,串口每收到一個資料,呼叫一次這個函式,
void CopeSerial2Data(unsigned char ucData)
{
static unsigned char ucRxBuffer[250];
static unsigned char ucRxCnt = 0;
//Usart_SendByte( DEBUG_USARTx2, ucData);
//printf("歡迎使用\n\n");
ucRxBuffer[ucRxCnt++]=ucData; //將收到的資料存入緩沖區中
if (ucRxBuffer[0]!=0x55) //資料頭不對,則重新開始尋找0x55資料頭
{
ucRxCnt=0;
return;
}
if (ucRxCnt<11) {return;}//資料不滿11個,則回傳
else
{
switch(ucRxBuffer[1])//判斷資料是哪種資料,然后將其拷貝到對應的結構體中,有些資料包需要通過上位機打開對應的輸出后,才能接收到這個資料包的資料
{
//memcpy為編譯器自帶的記憶體拷貝函式,需參考"string.h",將接識訓沖區的字符拷貝到資料結構體里面,從而實作資料的決議,
case 0x51: memcpy(&stcAcc,&ucRxBuffer[2],8);break;
case 0x52: memcpy(&stcGyro,&ucRxBuffer[2],8);break;
case 0x53: memcpy(&stcAngle,&ucRxBuffer[2],8);break;
}
ucRxCnt=0;//清空快取區
}
}
int main(void)
{
unsigned char i = 0;
float X=0.0,Y=0.0,Z=0.0;
//--------------------------------------------------------------------------------
/* 初始化 */
//--------------------------------------------------------------------------------
LED_GPIO_Config();
USART_Config1();
USART_Config2();
BASIC_TIM_Init();
EXTI_Key_Config();
SysTick_Init(); /* 配置SysTick 為10us中斷一次 */
OLED_Init(); //初始化OLED
OLED_Clear(0) ;
//--------------------------------------------------------------------------------
/*setup*/
//--------------------------------------------------------------------------------
//LED1_ON;
printf("YCHEN\n");
printf("正在進行加速度校準\r\n");
sendcmd(ACCCMD);//等待模塊內部自動校準好,模塊內部會自動計算需要一定的時間
printf("加速度校準完成\r\n");
SOFT_DELAY;
printf("進行Z軸角度清零\r\n");
sendcmd(YAWCMD);
printf("Z軸角度清零完成\r\n");
//---------------------------------------------------------------------------------
OLED_Clear(0);
OLED_ShowCHinese(6,0,0);//備
OLED_ShowCHinese(26,0,1);//戰
OLED_ShowCHinese(46,0,2);//電
OLED_ShowCHinese(66,0,3);//賽
//OLED_ShowCHinese(86,0,4);//技
//OLED_ShowCHinese(106,0,5);//術
//OLED_ShowString(4,3,"V1.5\" YCHEN144",16);
OLED_ShowString(12,3,"X",16);
OLED_ShowString(43,3,"Y",16);
OLED_ShowString(73,3,"Z",16);
//OLED_ShowString(63,6,"CODE:",16);
//OLED_ShowChar(48,6,t,16);//顯示ASCII字符
// while(1)
// {
// t++;
// if(t>'~')t=' ';
// OLED_ShowNum(53,6,t,3,16);//顯示ASCII字符的碼值
// SysTick_Delay_Ms( 500 );
// }
while(1)
{
SysTick_Delay_Ms( 100 );
/*下面這一塊不推薦使用*/
// i++;
// if(i>10)
// {
// i = 0;
// printf("正在進行加速度校準\r\n");
// sendcmd(ACCCMD);//等待模塊內部自動校準好,模塊內部會自動計算需要一定的時間
// printf("加速度校準完成\r\n");
// SOFT_DELAY;
// printf("進行Z軸角度清零\r\n");
// sendcmd(YAWCMD);
// printf("Z軸角度清零完成\r\n");
// }
printf("-----------------------------------\r\n");
//輸出加速度
//串口接受到的資料已經拷貝到對應的結構體的變數中了,根據說明書的協議,以加速度為例 stcAcc.a[0]/32768*16就是X軸的加速度,
//printf("Acc:%.3f %.3f %.3f\r\n",(float)stcAcc.a[0]/32768*16,(float)stcAcc.a[1]/32768*16,(float)stcAcc.a[2]/32768*16);
//SOFT_DELAY;
//輸出角速度
//printf("Gyro:%.3f %.3f %.3f\r\n",(float)stcGyro.w[0]/32768*2000,(float)stcGyro.w[1]/32768*2000,(float)stcGyro.w[2]/32768*2000);
//SOFT_DELAY;
//輸出角度
//printf("Angle:%.3f %.3f %.3f\r\n",(float)stcAngle.Angle[0]/32768*180,(float)stcAngle.Angle[1]/32768*180,(float)stcAngle.Angle[2]/32768*180);
Y=(float)stcAngle.Angle[0]/32768*180;
printf("Y:%.3f\r\n",Y);
X=(float)stcAngle.Angle[1]/32768*180;
printf("X:%.3f\r\n",X);
Z=(float)stcAngle.Angle[2]/32768*180;
printf("Z:%.3f\r\n",Z);
OLED_ShowNum(13,6,X,3,16);//顯示ASCII字符的碼值
OLED_ShowNum(43,6,Y,3,16);//顯示ASCII字符的碼值
OLED_ShowNum(73,6,Z,3,16);//顯示ASCII字符的碼值
if(X>30)LED1_ON;
if(Y>30)LED2_ON;
if(Z>30)LED3_ON;
SysTick_Delay_Ms( 10 );//等待傳輸完成
}
}
void Delay(__IO uint32_t nCount) //簡單的延時函式
{
for(; nCount != 0; nCount--);
}
/*********************************************END OF FILE**********************/
OLED配置:
#include "./oled/oled.h"
#include "stdlib.h"
#include "./oled/oledfont.h"
void IIC_Start()
{
OLED_SCLK_Set() ;
OLED_SDIN_Set();
OLED_SDIN_Clr();
OLED_SCLK_Clr();
}
void IIC_Stop()
{
OLED_SCLK_Set() ;
// OLED_SCLK_Clr();
OLED_SDIN_Clr();
OLED_SDIN_Set();
}
void IIC_Wait_Ack()
{
//GPIOB->CRH &= 0XFFF0FFFF; //設定PB12為上拉輸入模式
//GPIOB->CRH |= 0x00080000;
// OLED_SDA = 1;
// delay_us(1);
//OLED_SCL = 1;
//delay_us(50000);
/* while(1)
{
if(!OLED_SDA) //判斷是否接收到OLED 應答信號
{
//GPIOB->CRH &= 0XFFF0FFFF; //設定PB12為通用推免輸出模式
//GPIOB->CRH |= 0x00030000;
return;
}
}
*/
OLED_SCLK_Set() ;
OLED_SCLK_Clr();
}
void Write_IIC_Byte(unsigned char IIC_Byte)
{
unsigned char i;
unsigned char m,da;
da=IIC_Byte;
OLED_SCLK_Clr();
for(i=0;i<8;i++)
{
m=da;
// OLED_SCLK_Clr();
m=m&0x80;
if(m==0x80)
{OLED_SDIN_Set();}
else OLED_SDIN_Clr();
da=da<<1;
OLED_SCLK_Set();
OLED_SCLK_Clr();
}
}
void Write_IIC_Command(unsigned char IIC_Command)
{
IIC_Start();
Write_IIC_Byte(IIC_SLAVE_ADDR); //Slave address,SA0=0
IIC_Wait_Ack();
Write_IIC_Byte(0x00); //write command
IIC_Wait_Ack();
Write_IIC_Byte(IIC_Command);
IIC_Wait_Ack();
IIC_Stop();
}
void Write_IIC_Data(unsigned char IIC_Data)
{
IIC_Start();
Write_IIC_Byte(IIC_SLAVE_ADDR); //D/C#=0; R/W#=0
IIC_Wait_Ack();
Write_IIC_Byte(0x40); //write data
IIC_Wait_Ack();
Write_IIC_Byte(IIC_Data);
IIC_Wait_Ack();
IIC_Stop();
}
void OLED_WR_Byte(unsigned dat,unsigned cmd)
{
if(cmd)
{
Write_IIC_Data(dat);
}
else {
Write_IIC_Command(dat);
}
}
void fill_picture(unsigned char fill_Data)
{
unsigned char m,n;
for(m=0;m<8;m++)
{
OLED_WR_Byte(0xb0+m,0); //page0-page1
OLED_WR_Byte(0x00,0); //low column start address
OLED_WR_Byte(0x10,0); //high column start address
for(n=0;n<128;n++)
{
OLED_WR_Byte(fill_Data,1);
}
}
}
void Delay_50ms(unsigned int Del_50ms)
{
unsigned int m;
for(;Del_50ms>0;Del_50ms--)
for(m=6245;m>0;m--);
}
void Delay_1ms(unsigned int Del_1ms)
{
unsigned char j;
while(Del_1ms--)
{
for(j=0;j<123;j++);
}
}
void OLED_Set_Pos(unsigned char x, unsigned char y)
{ OLED_WR_Byte(0xb0+y,OLED_CMD);
OLED_WR_Byte(((x&0xf0)>>4)|0x10,OLED_CMD);
OLED_WR_Byte((x&0x0f),OLED_CMD);
}
void OLED_Display_On(void)
{
OLED_WR_Byte(0X8D,OLED_CMD); //SET DCDC命令
OLED_WR_Byte(0X14,OLED_CMD); //DCDC ON
OLED_WR_Byte(0XAF,OLED_CMD); //DISPLAY ON
}
void OLED_Display_Off(void)
{
OLED_WR_Byte(0X8D,OLED_CMD); //SET DCDC命令
OLED_WR_Byte(0X10,OLED_CMD); //DCDC OFF
OLED_WR_Byte(0XAE,OLED_CMD); //DISPLAY OFF
}
void OLED_Clear(unsigned dat)
{
u8 i,n;
for(i=0;i<8;i++)
{
OLED_WR_Byte (0xb0+i,OLED_CMD); //設定頁地址(0~7)
OLED_WR_Byte (0x00,OLED_CMD); //設定顯示位置—列低地址
OLED_WR_Byte (0x10,OLED_CMD); //設定顯示位置—列高地址
for(n=0;n<128;n++)OLED_WR_Byte(dat,OLED_DATA);
} //更新顯示
}
void OLED_On(void)
{
u8 i,n;
for(i=0;i<8;i++)
{
OLED_WR_Byte (0xb0+i,OLED_CMD); //設定頁地址(0~7)
OLED_WR_Byte (0x00,OLED_CMD); //設定顯示位置—列低地址
OLED_WR_Byte (0x10,OLED_CMD); //設定顯示位置—列高地址
for(n=0;n<128;n++)OLED_WR_Byte(1,OLED_DATA);
} //更新顯示
}
void OLED_ShowChar(u8 x,u8 y,u8 chr,u8 Char_Size)
{
unsigned char c=0,i=0;
c=chr-' ';//得到偏移后的值
if(x>Max_Column-1){x=0;y=y+2;}
if(Char_Size ==16)
{
OLED_Set_Pos(x,y);
for(i=0;i<8;i++)
OLED_WR_Byte(F8X16[c*16+i],OLED_DATA);
OLED_Set_Pos(x,y+1);
for(i=0;i<8;i++)
OLED_WR_Byte(F8X16[c*16+i+8],OLED_DATA);
}
else {
OLED_Set_Pos(x,y);
for(i=0;i<6;i++)
OLED_WR_Byte(F6x8[c][i],OLED_DATA);
}
}
u32 oled_pow(u8 m,u8 n)
{
u32 result=1;
while(n--)result*=m;
return result;
}
void OLED_ShowNum(u8 x,u8 y,u32 num,u8 len,u8 size2)
{
u8 t,temp;
u8 enshow=0;
for(t=0;t<len;t++)
{
temp=(num/oled_pow(10,len-t-1))%10;
if(enshow==0&&t<(len-1))
{
if(temp==0)
{
OLED_ShowChar(x+(size2/2)*t,y,' ',size2);
continue;
}else enshow=1;
}
OLED_ShowChar(x+(size2/2)*t,y,temp+'0',size2);
}
}
void OLED_ShowString(u8 x,u8 y,u8 *chr,u8 Char_Size)
{
unsigned char j=0;
while (chr[j]!='\0')
{ OLED_ShowChar(x,y,chr[j],Char_Size);
x+=8;
if(x>120){x=0;y+=2;}
j++;
}
}
void OLED_ShowCHinese(u8 x,u8 y,u8 no)
{
u8 t,adder=0;
OLED_Set_Pos(x,y);
for(t=0;t<16;t++)
{
OLED_WR_Byte(Hzk[2*no][t],OLED_DATA);
adder+=1;
}
OLED_Set_Pos(x,y+1);
for(t=0;t<16;t++)
{
OLED_WR_Byte(Hzk[2*no+1][t],OLED_DATA);
adder+=1;
}
}
void OLED_DrawBMP(unsigned char x0, unsigned char y0,unsigned char x1, unsigned char y1,unsigned char BMP[])
{
unsigned int j=0;
unsigned char x,y;
if(y1%8==0) y=y1/8;
else y=y1/8+1;
for(y=y0;y<y1;y++)
{
OLED_Set_Pos(x0,y);
for(x=x0;x<x1;x++)
{
OLED_WR_Byte(BMP[j++],OLED_DATA);
}
}
}
void OLED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PB埠時鐘
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13|GPIO_Pin_14; //PB13,PB14推挽輸出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽輸出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//速度50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化GPIOB13,14
GPIO_SetBits(GPIOB,GPIO_Pin_13|GPIO_Pin_14); //PB13,PB14 輸出高
SysTick_Delay_Ms( 200 );
OLED_WR_Byte(0xAE,OLED_CMD);//--display off
OLED_WR_Byte(0x00,OLED_CMD);//---set low column address
OLED_WR_Byte(0x10,OLED_CMD);//---set high column address
OLED_WR_Byte(0x40,OLED_CMD);//--set start line address
OLED_WR_Byte(0xB0,OLED_CMD);//--set page address
OLED_WR_Byte(0x81,OLED_CMD); // contract control
OLED_WR_Byte(0xFF,OLED_CMD);//--128
OLED_WR_Byte(0xA1,OLED_CMD);//set segment remap
OLED_WR_Byte(0xA6,OLED_CMD);//--normal / reverse
OLED_WR_Byte(0xA8,OLED_CMD);//--set multiplex ratio(1 to 64)
OLED_WR_Byte(0x3F,OLED_CMD);//--1/32 duty
OLED_WR_Byte(0xC8,OLED_CMD);//Com scan direction
OLED_WR_Byte(0xD3,OLED_CMD);//-set display offset
OLED_WR_Byte(0x00,OLED_CMD);//
OLED_WR_Byte(0xD5,OLED_CMD);//set osc division
OLED_WR_Byte(0x80,OLED_CMD);//
OLED_WR_Byte(0xD8,OLED_CMD);//set area color mode off
OLED_WR_Byte(0x05,OLED_CMD);//
OLED_WR_Byte(0xD9,OLED_CMD);//Set Pre-Charge Period
OLED_WR_Byte(0xF1,OLED_CMD);//
OLED_WR_Byte(0xDA,OLED_CMD);//set com pin configuartion
OLED_WR_Byte(0x12,OLED_CMD);//
OLED_WR_Byte(0xDB,OLED_CMD);//set Vcomh
OLED_WR_Byte(0x30,OLED_CMD);//
OLED_WR_Byte(0x8D,OLED_CMD);//set charge pump enable
OLED_WR_Byte(0x14,OLED_CMD);//
OLED_WR_Byte(0xAF,OLED_CMD);//--turn on oled panel
}
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/335294.html
標籤:其他