一、邊緣檢測
1.1 什么是邊緣檢測?
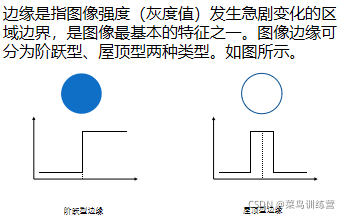
邊緣檢測是影像處理中重要的一步,在傳統的邊緣檢測中,都是把邊緣定義為顏色急劇變化的區域,邊緣檢測的目的就是找到影像中亮度變化劇烈的像素點構成的集合,表現出來的往往是輪廓,
1.2 邊緣檢測方法
- 微分算子法、最優算子法、擬合法,經典的邊緣檢測方法.
- 全域提取方法
- 以小波變換、數學形態學、模糊數學,分形理論等以高新技術為基礎的影像邊緣提取方法,
- 其他的邊緣檢測方法不做敘述
1.21 一階微分邊緣算子
一階微分邊緣算子也稱為梯度邊緣算子,它是利用影像在邊緣處的階躍性,即影像梯度在邊緣取得極大值的特性進行邊緣檢測,
梯度算子利用灰度一階導數的資訊完成影像邊緣的檢測,計算一階梯度,選取閾值,灰度梯度幅值大于閾值處點作為階躍狀邊緣點檢出,
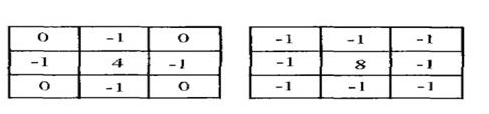
常見的一階微分模板:

二階微分Laplacian算子模板:
二.蟻群演算法
1.蟻群演算法基本原理
蟻群演算法是一項基于蟻群特點的群智能技術,最早由Marco Dorigo等人于1992年提出,稱之為螞蟻系統(ant system,AS),用于解決在圖中尋找最優路徑問題,即旅行商問題(TSP) ,
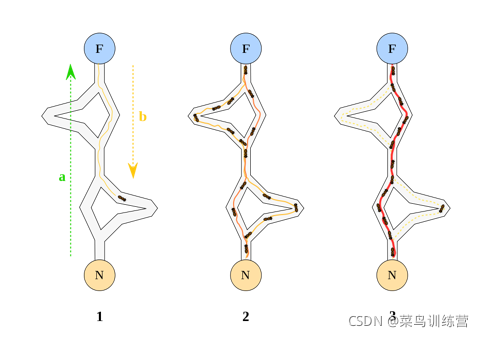
蟻群演算法模擬了自然界螞蟻的覓食程序,它們起初隨機地移動,當找到食物后,在回傳蟻群的途中分泌一種資訊素(pheromone),吸引其他螞蟻趨向于選擇該路徑,從而對路徑進行鞏固和加強,
這樣,當一只螞蟻在蟻群與食物之間找到了一條最佳(最短)路徑,其他螞蟻也隨之選擇同樣的路徑,這種正反饋機制使得蟻群最侄訓趨向于一條路徑,蟻群演算法正是模擬了這種群體行為來解決多種多樣的問題,
2.蟻群演算法的基本特征
正反饋性:螞蟻個體趨向于選擇最優路徑,從而最優路徑上將積累更多的資訊素,而高濃度的資訊素又會吸引更多的螞蟻,正反饋程序引導整個系統向最優解的方向進化,
分布式計算:每只人工螞蟻在問題空間的多個點同時開始相互獨立地構造問題解,而整個問題的求解不會因為某只人工螞蟻無法成功獲得解而受到影響,
魯棒性:相對于其它演算法,蟻群演算法對初始路線要求不高,即蟻群演算法的求解結果不依賴于初始路線的選擇,而且在搜索程序中不需要進行人工的調整,(魯棒性指的是系統的健壯性),
并行性:蟻群演算法中螞蟻個體搜索的程序彼此獨立,僅通過資訊素進行通信,因此演算法可看作是一個分布式多Agent系統,它在問題空間的多點同時開始獨立的解搜索,不僅增加了演算法的可靠性,也使得演算法具有較強的全域搜索能力,
自組織性:螞蟻個體作用簡單,而個體之間的協作作用特別明顯,因而可以將蟻群當做一個整體,甚至可以看做一個獨立生物體來研究,
三、基于蟻群演算法影像邊緣檢測的流程
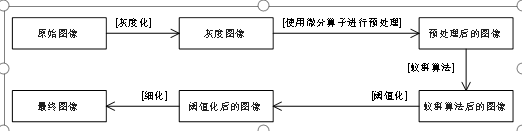
首先,我們對原始影像(真彩色)進行灰度化處理,得到單通道的灰度影像;
其次,選用一種微分算子對灰度化后的影像進行預處理;預處理后我們就可以將影像灰度值看作資訊素量而將蟻群按照一定規則分布其中,進行足夠次迭代后得到結果;
最后,需要對其進行閾值化,即根據設定的閾值,將影像按照每個像素的灰度值大小轉換為二值影像,經過這步我們便已經得到邊緣結果圖;
根據需要,可進一步使用細化演算法對其進行細化(這一步是可選的),
四 、展望
在研究程序中,我們也意識到了蟻群演算法客觀存在的缺陷,蟻群演算法屬于群智能演算法的一種,而群智能演算法是一種基于概率計算的隨機搜索進化演算法,在現階段仍然存在著一些問題:
演算法的數學理論基礎相對薄弱,關于此類的研究發展相對緩慢;同時,關于引數的設定現階段并沒有確切的理論依據,對具體問題與應用環境存在著很大的依賴性;
時間性能差,演算法的收斂速度較慢;
與其他演算法的比較性研究不足,缺乏合適的性能評估標準和測驗方法;
因為演算法本身基于概率,因此不具備絕對可信性,應用時或多或少地存在著一些風險,
其中,時間性能在現階段是蟻群演算法最大的缺陷之一,如何改善演算法的收斂速度,仍是未來的研究方向之一,不過,蟻群演算法作為一種群智能演算法,與并行計算的結合,會大大提高演算法的性能和運行效率,隨著并行計算和云計算的發展,蟻群演算法的先天優勢可以很好地適應于并行計算和云計算,因此,對蟻群演算法的進一步研究,仍具有很大的理論意義和實踐意義,
五、為什么要在影像分割中參考蟻群演算法
1. 原理
蟻群演算法應用于邊緣檢測的原理是將圖抽象成一無向圖,然后將一群螞蟻放置到圖中,各個螞蟻將根據頂點資訊激素強度和啟發式引導函式求得的概率從其領域頂點中選擇一個作為下一步目的的位置,通過多次回圈迭代最終使大多數螞蟻聚集到影像邊緣上,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/335321.html
標籤:其他
上一篇:天池競賽-地表建筑物識別
下一篇:2021-10-24