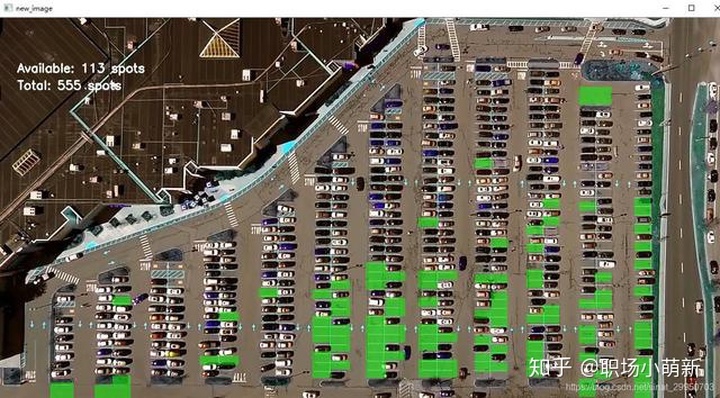
任務描述:識別這種停車場圖的 空車位 與 被占用車位
識別流程:預處理 -> 獲得車位坐標的字典 -> 訓練VGG網路進行二分類

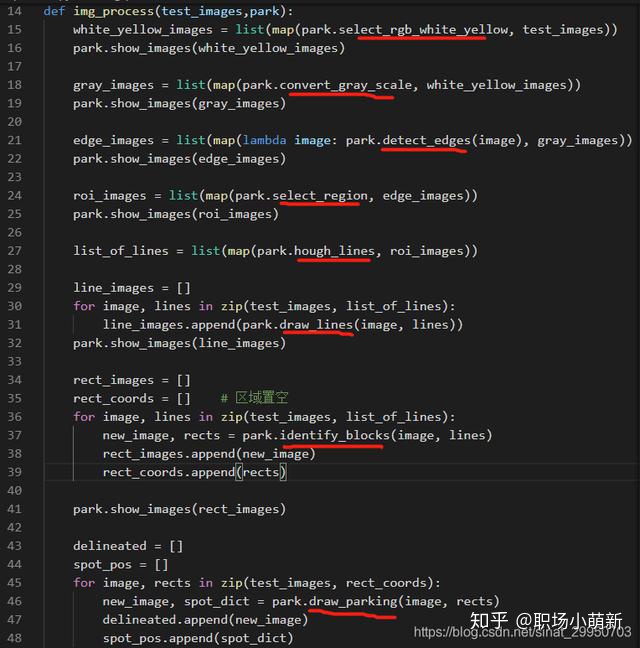
img_process 影像預處理程序
粉絲福利:領完再看!配套資料以及迪迦給大家準備的250G人工智能學習資料禮包(內含:兩大Pytorch、TensorFlow實戰框架視頻、影像識別、OpenCV、計算機視覺、深度學習與神經網路等等等視頻、代碼、PPT以及深度學習書籍)
只需要你點個關注,然后掃碼添加助手小姐姐VX即可無套路領取!
掃碼添加即可
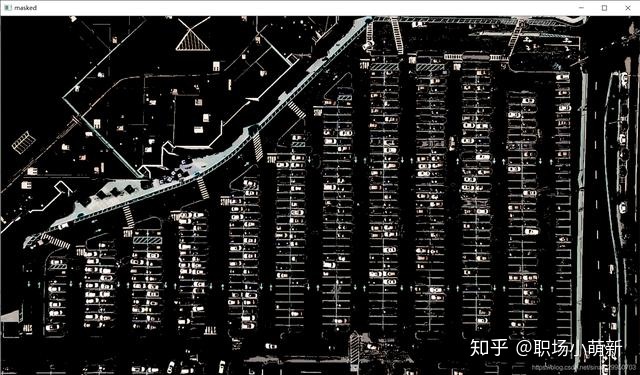
1.select_rgb_white_yellow 過濾背景(得到mask)
inRange(圖,min閾值,max閾值) 小于min(大于max)的為0,min-max的為255
dst = cv.bitwise_and(src1, src2[, dst[, mask]]
src1:圖1 src2:圖2 mask:圖1和圖2’與’操作的掩碼輸出影像
def select_rgb_white_yellow(self,image):
# 過濾掉背景
lower = np.uint8([120, 120, 120])
upper = np.uint8([255, 255, 255])
# lower_red和高于upper_red的部分分別變成0,lower_red~upper_red之間的值變成255,相當于過濾背景
white_mask = cv2.inRange(image, lower, upper)
self.cv_show('white_mask',white_mask)
masked = cv2.bitwise_and(image, image, mask = white_mask)
self.cv_show('masked',masked)
return masked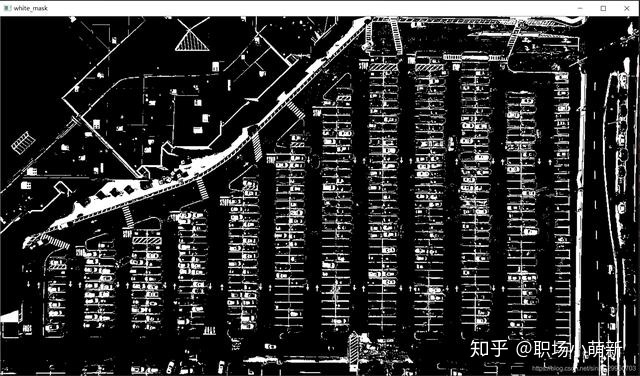
2.convert_gray_scale # rgb轉gray圖
3.detect_edges # Canny檢測
def convert_gray_scale(self,image):
return cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)
def detect_edges(self,image, low_threshold=50, high_threshold=200):
return cv2.Canny(image, low_threshold, high_threshold)4.select_region # 針對當前任務手動指定區域
cv2.circle(img,中心點(x,y),半徑r,color,粗細) 根據給定的圓心和半徑等畫圓 畫出指定點
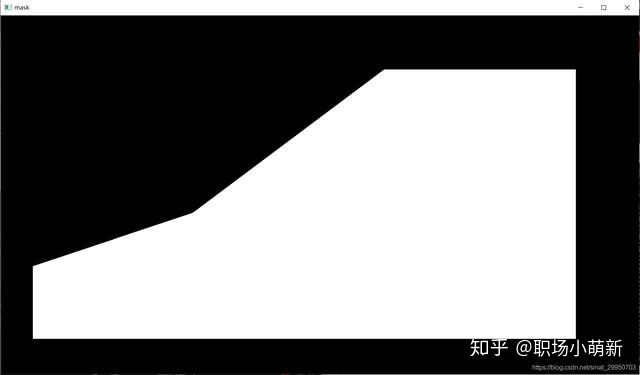
5.filter_region # 基于指定點剔除掉不需要的地方
np.zeros_like(img) # 生成一個跟img陣列一樣大小的 全0(黑)的陣列
cv2.fillPoly(mask, vertices, 255) # 在mask上畫多邊形,由這vertices的點組成的,填充為白色
cv2.bitwise_and # 只在mask為255上才能留下來其他就過濾掉了
def filter_region(self,image, vertices):
"""
剔除掉不需要的地方
"""
mask = np.zeros_like(image)
if len(mask.shape)==2:
cv2.fillPoly(mask, vertices, 255)
self.cv_show('mask', mask)
return cv2.bitwise_and(image, mask)
def select_region(self,image):
"""
手動選擇區域
"""
# first, define the polygon by vertices
rows, cols = image.shape[:2]
pt_1 = [cols*0.05, rows*0.90]
pt_2 = [cols*0.05, rows*0.70]
pt_3 = [cols*0.30, rows*0.55]
pt_4 = [cols*0.6, rows*0.15]
pt_5 = [cols*0.90, rows*0.15]
pt_6 = [cols*0.90, rows*0.90]
vertices = np.array([[pt_1, pt_2, pt_3, pt_4, pt_5, pt_6]], dtype=np.int32)
point_img = image.copy()
point_img = cv2.cvtColor(point_img, cv2.COLOR_GRAY2RGB)
for point in vertices[0]:
cv2.circle(point_img, (point[0],point[1]), 10, (0,0,255), 4)
self.cv_show('point_img',point_img)
return self.filter_region(image, vertices)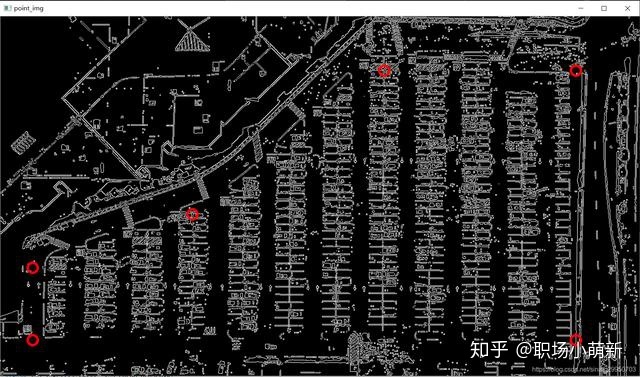
6.hough_lines # 找直線
HoughLinesP函式是統計概率霍夫線變換函式,該函式能輸出檢測到的直線的端點 (x_{0}, y_{0}, x_{1}, y_{1}),
其函式原型為:HoughLinesP(image, rho, theta, threshold[, lines[, minLineLength[, maxLineGap]]]) -> lines
cv2.HoughLinesP(邊緣檢測后的二值圖) 統計概率霍夫線變換函式
7.draw_lines # 過濾線
abs(y2-y1) <=1 不要斜線
abs(x2-x1) >=25 and abs(x2-x1) <= 55 長度太長的也不要
def hough_lines(self,image):
# 輸入的影像需要是邊緣檢測后的結果
# minLineLengh(線的最短長度,比這個短的都被忽略)和MaxLineCap(兩條直線之間的最大間隔,小于此值,認為是一條直線)
# rho距離精度,theta角度精度,threshod超過設定閾值才被檢測出線段
return cv2.HoughLinesP(image, rho=0.1, theta=np.pi/10, threshold=15, minLineLength=9, maxLineGap=4)
def draw_lines(self,image, lines, color=[255, 0, 0], thickness=2, make_copy=True):
# 過濾霍夫變換檢測到直線
if make_copy:
image = np.copy(image)
cleaned = []
for line in lines:
for x1,y1,x2,y2 in line:
if abs(y2-y1) <=1 and abs(x2-x1) >=25 and abs(x2-x1) <= 55:
cleaned.append((x1,y1,x2,y2))
cv2.line(image, (x1, y1), (x2, y2), color, thickness)
print(" No lines detected: ", len(cleaned))
return image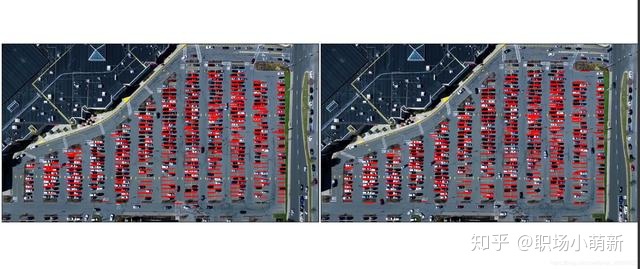
8.identify_blocks # 區域劃分
step 3: 指定行間距小于10的,劃分為不同的列,共12簇
def identify_blocks(self,image, lines, make_copy=True):
if make_copy:
new_image = np.copy(image)
#Step 1: 過濾部分直線
cleaned = []
for line in lines:
for x1,y1,x2,y2 in line:
if abs(y2-y1) <=1 and abs(x2-x1) >=25 and abs(x2-x1) <= 55:
cleaned.append((x1,y1,x2,y2))
#Step 2: 對直線按照x1進行排序
import operator
list1 = sorted(cleaned, key=operator.itemgetter(0, 1))
#Step 3: 找到多個列,相當于每列是一排車
clusters = {}
dIndex = 0
clus_dist = 10
for i in range(len(list1) - 1):
distance = abs(list1[i+1][0] - list1[i][0])
if distance <= clus_dist:
if not dIndex in clusters.keys(): clusters[dIndex] = []
clusters[dIndex].append(list1[i])
clusters[dIndex].append(list1[i + 1])
else:
dIndex += 1
#Step 4: 得到坐標
rects = {}
i = 0
for key in clusters:
all_list = clusters[key]
cleaned = list(set(all_list))
if len(cleaned) > 5:
cleaned = sorted(cleaned, key=lambda tup: tup[1])
avg_y1 = cleaned[0][1]
avg_y2 = cleaned[-1][1]
avg_x1 = 0
avg_x2 = 0
for tup in cleaned:
avg_x1 += tup[0]
avg_x2 += tup[2]
avg_x1 = avg_x1/len(cleaned)
avg_x2 = avg_x2/len(cleaned)
rects[i] = (avg_x1, avg_y1, avg_x2, avg_y2)
i += 1
print("Num Parking Lanes: ", len(rects))
#Step 5: 把列矩形畫出來
buff = 7
for key in rects:
tup_topLeft = (int(rects[key][0] - buff), int(rects[key][1]))
tup_botRight = (int(rects[key][2] + buff), int(rects[key][3]))
cv2.rectangle(new_image, tup_topLeft,tup_botRight,(0,255,0),3)
return new_image, rects
9.draw_parking
根據上一步切分的列,得到坐標,根據縱坐標的間距不斷切分停車位,車位間距gap為15.5
(y2-y1)/gap表示能停多少輛車
def draw_parking(self,image, rects, make_copy = True, color=[255, 0, 0], thickness=2, save = True):
if make_copy:
new_image = np.copy(image)
gap = 15.5
spot_dict = {} # 字典:一個車位對應一個位置
tot_spots = 0
# 微調
adj_y1 = {0: 20, 1:-10, 2:0, 3:-11, 4:28, 5:5, 6:-15, 7:-15, 8:-10, 9:-30, 10:9, 11:-32}
adj_y2 = {0: 30, 1: 50, 2:15, 3:10, 4:-15, 5:15, 6:15, 7:-20, 8:15, 9:15, 10:0, 11:30}
adj_x1 = {0: -8, 1:-15, 2:-15, 3:-15, 4:-15, 5:-15, 6:-15, 7:-15, 8:-10, 9:-10, 10:-10, 11:0}
adj_x2 = {0: 0, 1: 15, 2:15, 3:15, 4:15, 5:15, 6:15, 7:15, 8:10, 9:10, 10:10, 11:0}
# 繼續微調
for key in rects:
tup = rects[key]
x1 = int(tup[0]+ adj_x1[key])
x2 = int(tup[2]+ adj_x2[key])
y1 = int(tup[1] + adj_y1[key])
y2 = int(tup[3] + adj_y2[key])
cv2.rectangle(new_image, (x1, y1),(x2,y2),(0,255,0),2)
# (y2-y1)//gap表示能停多少輛車
num_splits = int(abs(y2-y1)//gap)
for i in range(0, num_splits+1):
y = int(y1 + i*gap)
cv2.line(new_image, (x1, y), (x2, y), color, thickness)
if key > 0 and key < len(rects) -1 :
#豎直線
x = int((x1 + x2)/2)
cv2.line(new_image, (x, y1), (x, y2), color, thickness)
# 計算數量
if key == 0 or key == (len(rects) -1):
tot_spots += num_splits +1
else:
tot_spots += 2*(num_splits +1) # 雙排的乘2
# 字典對應好
if key == 0 or key == (len(rects) -1):
for i in range(0, num_splits+1):
cur_len = len(spot_dict)
y = int(y1 + i*gap)
spot_dict[(x1, y, x2, y+gap)] = cur_len +1
else:
for i in range(0, num_splits+1):
cur_len = len(spot_dict)
y = int(y1 + i*gap)
x = int((x1 + x2)/2)
spot_dict[(x1, y, x, y+gap)] = cur_len +1
spot_dict[(x, y, x2, y+gap)] = cur_len +2
print("total parking spaces: ", tot_spots, cur_len)
if save:
filename = 'with_parking.jpg'
cv2.imwrite(filename, new_image)
return new_image, spot_dict 
save_images_for_cnn 保存所有切割出來的圖片
非必須的步驟,主要是要獲得車位坐標的字典
def save_images_for_cnn(self,image, spot_dict, folder_name ='cnn_data'):
for spot in spot_dict.keys():
(x1, y1, x2, y2) = spot
(x1, y1, x2, y2) = (int(x1), int(y1), int(x2), int(y2))
#裁剪
spot_img = image[y1:y2, x1:x2]
spot_img = cv2.resize(spot_img, (0,0), fx=2.0, fy=2.0)
spot_id = spot_dict[spot]
filename = 'spot' + str(spot_id) +'.jpg'
print(spot_img.shape, filename, (x1,x2,y1,y2))
cv2.imwrite(os.path.join(folder_name, filename), spot_img)主函式
final_spot_dict 是img_process函式 return的車位坐標字典
if __name__ == '__main__':
test_images = [plt.imread(path) for path in glob.glob('test_images/*.jpg')]
weights_path = 'car1.h5'
video_name = 'parking_video.mp4'
class_dictionary = {}
class_dictionary[0] = 'empty'
class_dictionary[1] = 'occupied'
park = Parking() # 實體化Parking物件
park.show_images(test_images)
final_spot_dict = img_process(test_images,park) # 影像處理
model = keras_model(weights_path)
img_test(test_images,final_spot_dict,model,class_dictionary)
video_test(video_name,final_spot_dict,model,class_dictionary)其中 h5檔案 是已訓練好的二分類車位的權重,呼叫即可進行分類
關于深度學習的知識就不贅述了
附:完整代碼
park.py
from __future__ import division
import matplotlib.pyplot as plt
import cv2
import os, glob
import numpy as np
from PIL import Image
from keras.applications.imagenet_utils import preprocess_input
from keras.models import load_model
from keras.preprocessing import image
from Parking import Parking
import pickle
cwd = os.getcwd()
def img_process(test_images,park):
white_yellow_images = list(map(park.select_rgb_white_yellow, test_images))
park.show_images(white_yellow_images)
gray_images = list(map(park.convert_gray_scale, white_yellow_images))
park.show_images(gray_images)
edge_images = list(map(lambda image: park.detect_edges(image), gray_images))
park.show_images(edge_images)
roi_images = list(map(park.select_region, edge_images))
park.show_images(roi_images)
list_of_lines = list(map(park.hough_lines, roi_images))
line_images = []
for image, lines in zip(test_images, list_of_lines):
line_images.append(park.draw_lines(image, lines))
park.show_images(line_images)
rect_images = []
rect_coords = [] # 區域置空
for image, lines in zip(test_images, list_of_lines):
new_image, rects = park.identify_blocks(image, lines)
rect_images.append(new_image)
rect_coords.append(rects)
park.show_images(rect_images)
delineated = []
spot_pos = []
for image, rects in zip(test_images, rect_coords):
new_image, spot_dict = park.draw_parking(image, rects)
delineated.append(new_image)
spot_pos.append(spot_dict)
park.show_images(delineated)
final_spot_dict = spot_pos[1]
print(len(final_spot_dict))
with open('spot_dict.pickle', 'wb') as handle:
pickle.dump(final_spot_dict, handle, protocol=pickle.HIGHEST_PROTOCOL)
# park.save_images_for_cnn(test_images[0],final_spot_dict)
return final_spot_dict
def keras_model(weights_path):
model = load_model(weights_path)
return model
def img_test(test_images,final_spot_dict,model,class_dictionary):
for i in range (len(test_images)):
predicted_images = park.predict_on_image(test_images[i],final_spot_dict,model,class_dictionary)
def video_test(video_name,final_spot_dict,model,class_dictionary):
name = video_name
cap = cv2.VideoCapture(name)
park.predict_on_video(name,final_spot_dict,model,class_dictionary,ret=True)
if __name__ == '__main__':
test_images = [plt.imread(path) for path in glob.glob('test_images/*.jpg')]
weights_path = 'car1.h5'
video_name = 'parking_video.mp4'
class_dictionary = {}
class_dictionary[0] = 'empty'
class_dictionary[1] = 'occupied'
park = Parking() # 實體化Parking物件
park.show_images(test_images)
final_spot_dict = img_process(test_images,park) # 影像處理
model = keras_model(weights_path)
img_test(test_images,final_spot_dict,model,class_dictionary)
# video_test(video_name,final_spot_dict,model,class_dictionary)
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081828384Parking.py
import matplotlib.pyplot as plt
import cv2
import os, glob
import numpy as np
# 要用的函式封裝在Parking中了
class Parking:
def show_images(self, images, cmap=None):
cols = 2
rows = (len(images)+1)//cols
plt.figure(figsize=(15, 12))
for i, image in enumerate(images):
plt.subplot(rows, cols, i+1)
cmap = 'gray' if len(image.shape)==2 else cmap
plt.imshow(image, cmap=cmap)
plt.xticks([])
plt.yticks([])
plt.tight_layout(pad=0, h_pad=0, w_pad=0)
plt.show()
def cv_show(self,name,img):
cv2.imshow(name, img)
cv2.waitKey(0)
cv2.destroyAllWindows()
def select_rgb_white_yellow(self,image):
# 過濾掉背景
lower = np.uint8([120, 120, 120])
upper = np.uint8([255, 255, 255])
# lower_red和高于upper_red的部分分別變成0,lower_red~upper_red之間的值變成255,相當于過濾背景
white_mask = cv2.inRange(image, lower, upper)
self.cv_show('white_mask',white_mask)
masked = cv2.bitwise_and(image, image, mask = white_mask)
self.cv_show('masked',masked)
return masked
def convert_gray_scale(self,image):
return cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)
def detect_edges(self,image, low_threshold=50, high_threshold=200):
return cv2.Canny(image, low_threshold, high_threshold)
def filter_region(self,image, vertices):
"""
剔除掉不需要的地方
"""
mask = np.zeros_like(image)
if len(mask.shape)==2:
cv2.fillPoly(mask, vertices, 255)
self.cv_show('mask', mask)
return cv2.bitwise_and(image, mask)
def select_region(self,image):
"""
手動選擇區域
"""
# first, define the polygon by vertices
rows, cols = image.shape[:2]
pt_1 = [cols*0.05, rows*0.90]
pt_2 = [cols*0.05, rows*0.70]
pt_3 = [cols*0.30, rows*0.55]
pt_4 = [cols*0.6, rows*0.15]
pt_5 = [cols*0.90, rows*0.15]
pt_6 = [cols*0.90, rows*0.90]
vertices = np.array([[pt_1, pt_2, pt_3, pt_4, pt_5, pt_6]], dtype=np.int32)
point_img = image.copy()
point_img = cv2.cvtColor(point_img, cv2.COLOR_GRAY2RGB)
for point in vertices[0]:
cv2.circle(point_img, (point[0],point[1]), 10, (0,0,255), 4)
self.cv_show('point_img',point_img)
return self.filter_region(image, vertices)
def hough_lines(self,image):
# 輸入的影像需要是邊緣檢測后的結果
# minLineLengh(線的最短長度,比這個短的都被忽略)和MaxLineCap(兩條直線之間的最大間隔,小于此值,認為是一條直線)
# rho距離精度,theta角度精度,threshod超過設定閾值才被檢測出線段
return cv2.HoughLinesP(image, rho=0.1, theta=np.pi/10, threshold=15, minLineLength=9, maxLineGap=4)
def draw_lines(self,image, lines, color=[255, 0, 0], thickness=2, make_copy=True):
# 過濾霍夫變換檢測到直線
if make_copy:
image = np.copy(image)
cleaned = []
for line in lines:
for x1,y1,x2,y2 in line:
if abs(y2-y1) <=1 and abs(x2-x1) >=25 and abs(x2-x1) <= 55:
cleaned.append((x1,y1,x2,y2))
cv2.line(image, (x1, y1), (x2, y2), color, thickness)
print(" No lines detected: ", len(cleaned))
return image
def identify_blocks(self,image, lines, make_copy=True):
if make_copy:
new_image = np.copy(image)
#Step 1: 過濾部分直線
cleaned = []
for line in lines:
for x1,y1,x2,y2 in line:
if abs(y2-y1) <=1 and abs(x2-x1) >=25 and abs(x2-x1) <= 55:
cleaned.append((x1,y1,x2,y2))
#Step 2: 對直線按照x1進行排序
import operator
list1 = sorted(cleaned, key=operator.itemgetter(0, 1))
#Step 3: 找到多個列,相當于每列是一排車
clusters = {}
dIndex = 0
clus_dist = 10
for i in range(len(list1) - 1):
distance = abs(list1[i+1][0] - list1[i][0])
if distance <= clus_dist:
if not dIndex in clusters.keys(): clusters[dIndex] = []
clusters[dIndex].append(list1[i])
clusters[dIndex].append(list1[i + 1])
else:
dIndex += 1
#Step 4: 得到坐標
rects = {}
i = 0
for key in clusters:
all_list = clusters[key]
cleaned = list(set(all_list))
if len(cleaned) > 5:
cleaned = sorted(cleaned, key=lambda tup: tup[1])
avg_y1 = cleaned[0][1]
avg_y2 = cleaned[-1][1]
avg_x1 = 0
avg_x2 = 0
for tup in cleaned:
avg_x1 += tup[0]
avg_x2 += tup[2]
avg_x1 = avg_x1/len(cleaned)
avg_x2 = avg_x2/len(cleaned)
rects[i] = (avg_x1, avg_y1, avg_x2, avg_y2)
i += 1
print("Num Parking Lanes: ", len(rects))
#Step 5: 把列矩形畫出來
buff = 7
for key in rects:
tup_topLeft = (int(rects[key][0] - buff), int(rects[key][1]))
tup_botRight = (int(rects[key][2] + buff), int(rects[key][3]))
cv2.rectangle(new_image, tup_topLeft,tup_botRight,(0,255,0),3)
return new_image, rects
def draw_parking(self,image, rects, make_copy = True, color=[255, 0, 0], thickness=2, save = True):
if make_copy:
new_image = np.copy(image)
gap = 15.5
spot_dict = {} # 字典:一個車位對應一個位置
tot_spots = 0
# 微調
adj_y1 = {0: 20, 1:-10, 2:0, 3:-11, 4:28, 5:5, 6:-15, 7:-15, 8:-10, 9:-30, 10:9, 11:-32}
adj_y2 = {0: 30, 1: 50, 2:15, 3:10, 4:-15, 5:15, 6:15, 7:-20, 8:15, 9:15, 10:0, 11:30}
adj_x1 = {0: -8, 1:-15, 2:-15, 3:-15, 4:-15, 5:-15, 6:-15, 7:-15, 8:-10, 9:-10, 10:-10, 11:0}
adj_x2 = {0: 0, 1: 15, 2:15, 3:15, 4:15, 5:15, 6:15, 7:15, 8:10, 9:10, 10:10, 11:0}
#
for key in rects:
tup = rects[key]
x1 = int(tup[0]+ adj_x1[key])
x2 = int(tup[2]+ adj_x2[key])
y1 = int(tup[1] + adj_y1[key])
y2 = int(tup[3] + adj_y2[key])
cv2.rectangle(new_image, (x1, y1),(x2,y2),(0,255,0),2)
# (y2-y1)//gap表示能停多少輛車
num_splits = int(abs(y2-y1)//gap)
for i in range(0, num_splits+1):
y = int(y1 + i*gap)
cv2.line(new_image, (x1, y), (x2, y), color, thickness)
if key > 0 and key < len(rects) -1 :
#豎直線
x = int((x1 + x2)/2)
cv2.line(new_image, (x, y1), (x, y2), color, thickness)
# 計算數量
if key == 0 or key == (len(rects) -1):
tot_spots += num_splits +1
else:
tot_spots += 2*(num_splits +1) # 雙排的乘2
# 字典對應好
if key == 0 or key == (len(rects) -1):
for i in range(0, num_splits+1):
cur_len = len(spot_dict)
y = int(y1 + i*gap)
spot_dict[(x1, y, x2, y+gap)] = cur_len +1
else:
for i in range(0, num_splits+1):
cur_len = len(spot_dict)
y = int(y1 + i*gap)
x = int((x1 + x2)/2)
spot_dict[(x1, y, x, y+gap)] = cur_len +1
spot_dict[(x, y, x2, y+gap)] = cur_len +2
print("total parking spaces: ", tot_spots, cur_len)
if save:
filename = 'with_parking.jpg'
cv2.imwrite(filename, new_image)
return new_image, spot_dict
def assign_spots_map(self,image, spot_dict, make_copy = True, color=[255, 0, 0], thickness=2):
if make_copy:
new_image = np.copy(image)
for spot in spot_dict.keys():
(x1, y1, x2, y2) = spot
cv2.rectangle(new_image, (int(x1),int(y1)), (int(x2),int(y2)), color, thickness)
return new_image
def save_images_for_cnn(self,image, spot_dict, folder_name ='cnn_data'):
for spot in spot_dict.keys():
(x1, y1, x2, y2) = spot
(x1, y1, x2, y2) = (int(x1), int(y1), int(x2), int(y2))
#裁剪
spot_img = image[y1:y2, x1:x2]
spot_img = cv2.resize(spot_img, (0,0), fx=2.0, fy=2.0)
spot_id = spot_dict[spot]
filename = 'spot' + str(spot_id) +'.jpg'
print(spot_img.shape, filename, (x1,x2,y1,y2))
cv2.imwrite(os.path.join(folder_name, filename), spot_img)
def make_prediction(self,image,model,class_dictionary):
#預處理
img = image/255.
#轉換成4D tensor
image = np.expand_dims(img, axis=0)
# 用訓練好的模型進行訓練
class_predicted = model.predict(image)
inID = np.argmax(class_predicted[0])
label = class_dictionary[inID]
return label
def predict_on_image(self,image, spot_dict , model,class_dictionary,make_copy=True, color = [0, 255, 0], alpha=0.5):
if make_copy:
new_image = np.copy(image)
overlay = np.copy(image)
self.cv_show('new_image',new_image)
cnt_empty = 0
all_spots = 0
for spot in spot_dict.keys():
all_spots += 1
(x1, y1, x2, y2) = spot
(x1, y1, x2, y2) = (int(x1), int(y1), int(x2), int(y2))
spot_img = image[y1:y2, x1:x2]
spot_img = cv2.resize(spot_img, (48, 48))
label = self.make_prediction(spot_img,model,class_dictionary)
if label == 'empty':
cv2.rectangle(overlay, (int(x1),int(y1)), (int(x2),int(y2)), color, -1)
cnt_empty += 1
cv2.addWeighted(overlay, alpha, new_image, 1 - alpha, 0, new_image)
cv2.putText(new_image, "Available: %d spots" %cnt_empty, (30, 95),
cv2.FONT_HERSHEY_SIMPLEX,
0.7, (255, 255, 255), 2)
cv2.putText(new_image, "Total: %d spots" %all_spots, (30, 125),
cv2.FONT_HERSHEY_SIMPLEX,
0.7, (255, 255, 255), 2)
save = False
if save:
filename = 'with_marking.jpg'
cv2.imwrite(filename, new_image)
self.cv_show('new_image',new_image)
return new_image
def predict_on_video(self,video_name,final_spot_dict, model,class_dictionary,ret=True):
cap = cv2.VideoCapture(video_name)
count = 0
while ret:
ret, image = cap.read()
count += 1
if count == 5:
count = 0
new_image = np.copy(image)
overlay = np.copy(image)
cnt_empty = 0
all_spots = 0
color = [0, 255, 0]
alpha=0.5
for spot in final_spot_dict.keys():
all_spots += 1
(x1, y1, x2, y2) = spot
(x1, y1, x2, y2) = (int(x1), int(y1), int(x2), int(y2))
spot_img = image[y1:y2, x1:x2]
spot_img = cv2.resize(spot_img, (48,48))
label = self.make_prediction(spot_img,model,class_dictionary)
if label == 'empty':
cv2.rectangle(overlay, (int(x1),int(y1)), (int(x2),int(y2)), color, -1)
cnt_empty += 1
cv2.addWeighted(overlay, alpha, new_image, 1 - alpha, 0, new_image)
cv2.putText(new_image, "Available: %d spots" %cnt_empty, (30, 95),
cv2.FONT_HERSHEY_SIMPLEX,
0.7, (255, 255, 255), 2)
cv2.putText(new_image, "Total: %d spots" %all_spots, (30, 125),
cv2.FONT_HERSHEY_SIMPLEX,
0.7, (255, 255, 255), 2)
cv2.imshow('frame', new_image)
if cv2.waitKey(10) & 0xFF == ord('q'):
break
cv2.destroyAllWindows()
cap.release()
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/349754.html
標籤:其他