隨著自動控制原理課程的結課,這時候應該做一個該課程系統的學習總結了,半個學期過去了,雖然自控老師是一位頗具經驗的老教授但無奈自己實在搶不著教室有限的座位,于是就開始了大學里日常的自學之旅(大學大學大不了自己學😀),希望通過寫文章這種方式,既能夠總結知識展示給他人,分享一下我對這門課的一些見解和想法,也是一個很好的平臺與各位志同道合的朋友交流學習,
一、什么是自動控制?
自動控制就是在沒人直接參與的條件下 ,利用控制器使被控物件的被控變數自動地按照預定的規律運行,
1. 控制器
外加的設備比較元件、放大元件、校正元件合稱為控制器,
2. 被控物件
被控物件是控制系統要進行控制的受控客體,通俗點說就是咱們直接控制的物體,比如說我們要撰寫程式來控制機器人跳舞那么機器人就是被控物件,
3. 被控變數
被控變數是一種被測量和被控制的量值或狀態,被控變數其實是一些聲光熱力電物理量,
比如上面說的編程控制機器人跳舞,機器人是咱們的被控物件,我們編程控制機器人的關節的角度發生改變從而讓機器人完成我們期望的動作,這里機器人關節的角度就是咱們的被控變數,
二、自動控制系統的作業原理
1.開環控制系統
控制器控制被控物件的被控變數,但只有順向作用,而被控變數不會影響到控制器的控制,這樣的系統就叫做開環控制系統,開環控制是一種結構簡單、成本低的控制方式,一般用于受干擾影響不大、控制精度要求不高的場合,比如電風扇、自動售歡訓、自動洗衣機,等等,
2.倍訓控制系統
開環系統雖然在一定程度上能夠對目標變數起到一定的控制作用,但當系統受到較大干擾時,比如電風扇當受阻力風速減小時,葉片轉速減慢,此時如果我們想維持原先的轉速就必須調整風速開關,但當阻力減小時,葉片轉速又會比之前的大,很難做到維持變數恒定,
但如果引入反饋,系統就不需要人為的控制就能維持變數恒定,比如在電風扇內部裝一個轉速傳感器,當傳感器測得的值與給定預期值更小時,系統便會發出信號,加大電機的電流,從而使轉速自動提高,這樣引入反饋的系統便能夠實作自動控制的功能了,而這種系統就叫做倍訓控制系統,在自動控制原理課程中,我們主要分析的時倍訓控制系統,在此之前,我們有必要先了解倍訓控制系統中的一些信號以及他們的符號,
(1)倍訓控制系統的信號
①輸出信號,也就是系統的被控變數——c(t)
②輸入信號,也就是系統的參考輸入——r(t)
③反饋信號,被控變數的測量結果
④偏差信號,輸入信號與反饋信號的差——e(r)
⑤誤差信號,期望的輸出與實際的輸出信號的差——e'(t)
⑥干擾信號,讓被控變數產生不應有變化的信號——n(t)
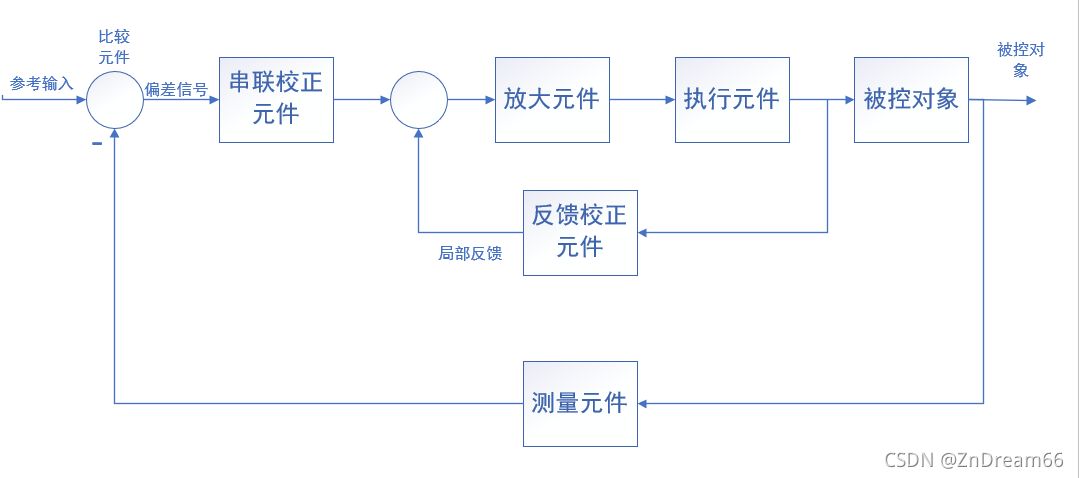
(2)倍訓控制系統的元部件
①測量元件,檢測被控變數實際值,
②給定元件,給出與期望的被控變數相對應的系統輸入量,
③放大元件,放大比較元件的偏差信號,用來推動執行元件去控制被控物件,
④執行元件,直接推動被控物件,使被控變數發生變化,
⑤比較元件,比較測量元件檢測的被控變數實際值與給定元件給出的輸入量并求出二者誤差
⑥校正元件,結構和引數易于調整,用串聯或者反饋的形式改善系統的性能,
三、自動控制系統時域上的性能指標
1.穩定性
穩定性是系統受到短暫的擾動后其運動性能從偏離平衡點恢復到原來平衡狀態的能力,控制系統中一般含有儲能元件或慣性元件,比如電容或電感,當他們的引數選取不合適時,系統容易發生振蕩和發散而無法正常作業,穩定性是所有自動控制系統必須滿足的最基本要求,
2.動態性能
當系統的參考輸入改變或有外界擾動時,系統會偏離平衡狀態,由于系統記憶體在能量不能發生突變的儲能元件和慣性元件,所以系統不可能瞬間跳變到新的平衡狀態或者恢復到原來的平衡狀態,而是通過一個動態的穩態程序,這個程序就是瞬態回應從而達到穩態,
描述動態程序的性能可以用平穩性和快速性來衡量,系統如果具有較小的超調量和振蕩性那么他具有平穩性;如果系統由新狀態經歷較短的時間就能達到新的平衡那么它具有快速性,
3.穩態誤差
穩態誤差時系統完成過渡后,實際的穩態輸出量與期望的穩態輸出量之差,系統的穩態誤差越小,系統的精度越高,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/357238.html
標籤:AI