目錄
- 1. 概述
- 2. 原理
- 2.1. 光源型別
- 2.2. 反射型別
- 2.2.1. 環境反射(enviroment/ambient reflection)
- 2.2.2. 漫反射(diffuse reflection)
- 2.2.3. 綜合
- 3. 實體
- 3.1. 具體代碼
- 3.2. 改動詳解
- 3.2.1. 設定日照
- 3.2.2. 著色器光照設定
- 4. 結果
- 5. 參考
1. 概述
在上一篇教程《WebGL簡易教程(九):綜合實體:地形的繪制》中,實作了對一個地形場景的渲染,在這篇教程中,就給這個地形場景加上光照,讓其更加真實,立體感更強,
2. 原理
2.1. 光源型別
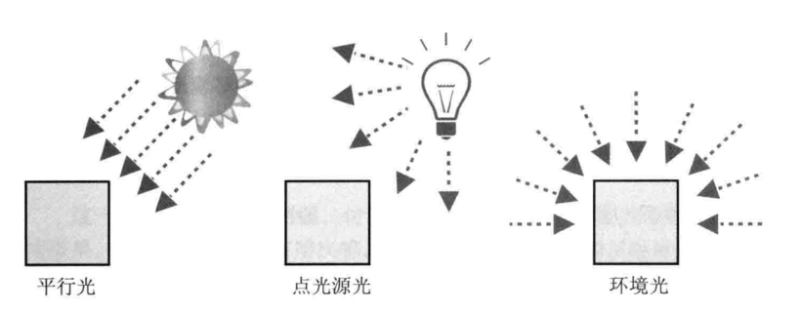
在現實中,即使是一個純白色的物體,你也能很容易識別物體的輪廓,事實上,這是因為光照的產生的陰暗差異給了其立體感,類似于現實,WebGL有三種基本型別的光:
- 點光源光:一個點向周圍發出的光,如燈泡、火焰等,定義一個點光源光需要光源的位置、光線方向以及顏色,根據照射點的位置不同,光線的方向也不同,
- 平行光:平行光可以看成是無限遠處的光源發出的光,如太陽光,因為離光源的位置特別遠,所以到達被照物體時可以認為光線是平行的,只需要用一個方向和顏色來定義即可,
- 環境光:環境光也就是間接光,指的是那些光源發出后,經過其他物體各種發射,然后照到物體表面上的光線,比如說夜間打開冰箱的門,這個廚房產生的亮光,因為經過多次反射后,強度差距已經非常小,沒有必要精確計算光線強度,所以一般認為環境光是均勻照射到物體表面的,只需要一個顏色來定義,
如圖所示:
2.2. 反射型別
由于物體最終顯示的顏色也就是光線反射造成的顏色,由兩部分因素決定:入射光和物體表面的型別,入射光資訊包括入射光的方向和顏色,而物體表面的資訊包含基底色和反射特性,根據物體反射光線的方式有環境反射(enviroment/ambient reflection)和漫反射(diffuse reflection)兩種型別的光:
2.2.1. 環境反射(enviroment/ambient reflection)
環境反射是針對環境光而言的,在環境反射中,環境光照射物體是各方面均勻、強度相等的,反射的方向可以認為就是入射光的反方向,也就是最終物體的顏色只跟入射光顏色和基底色有關,那么可以這樣定義環境反射光顏色:
\[<環境反射光顏色>=<入射光顏色>×<表面基底色>\tag{1} \]
注意在式子中,這個乘法操作指的是顏色矢量上逐分量相乘,
2.2.2. 漫反射(diffuse reflection)
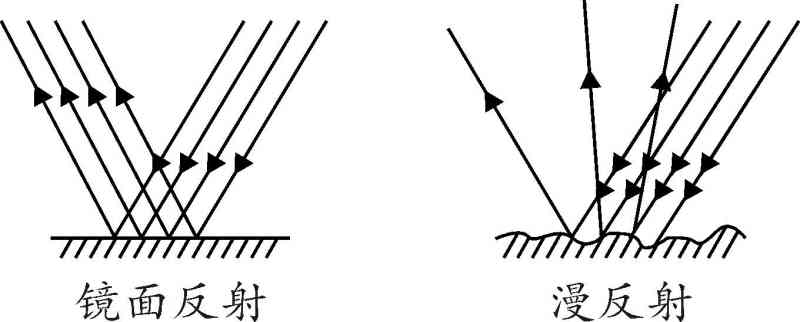
漫反射是針對平行光和點光源光而言的,相信在初中物理的時候就已經接觸過鏡面反射和漫反射,如果物體表面像鏡子一樣平滑,那么光線就會以特定的角度反射過去,從視覺效果來說就是刺眼的反光效果;如果物體表面是凹凸不平的,反射光就會以不固定的角度發射出去,在現實中大多數的物體表面都是粗糙的,所以才能看清各種各樣的物體,如圖所示:
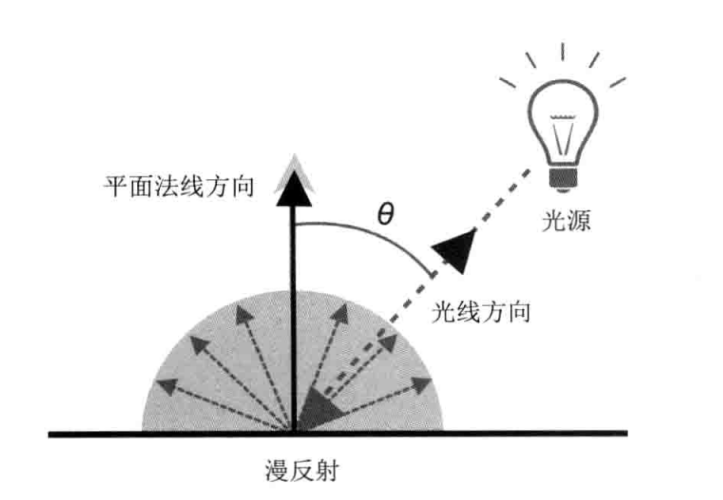
漫反射中,反射光的顏色除了取決于入射光的顏色、表面的基底色,還有入射光與物體表面的法向量形成的入射角,令入射角為θ,漫反射光的顏色可以根據下式計算:
\[<漫反射光顏色>=<入射光顏色>×<表面基底色>×cosθ\tag{2} \]
入射角θ可以通過矢量的點積來計算:
\[<光線方向>·<法線方向> = |光線方向|*|法線方向|*cosθ \]
如果光線方向和法線方向都是歸一化的,那么向量的模(長度)就為1,則有:
\[<漫反射光顏色>=<入射光顏色>×<表面基底色>×(<光線方向>·<法線方向>) \]
注意,這里的“光線方向”,實際上指的是入射方向的反方向,即從入射點指向光源方向,如圖所示:
2.2.3. 綜合
當漫反射和環境反射同時存在時,將兩者加起來,就會得到物體最終被觀察到的顏色:
\[<表面的反射光顏色> = <漫反射光顏色>+<環境反射光顏色>\tag{3} \]
3. 實體
3.1. 具體代碼
改進上一篇教程的JS代碼如下:
// 頂點著色器程式
var VSHADER_SOURCE =
'attribute vec4 a_Position;\n' + //位置
'attribute vec4 a_Color;\n' + //顏色
'attribute vec4 a_Normal;\n' + //法向量
'uniform mat4 u_MvpMatrix;\n' +
'varying vec4 v_Color;\n' +
'varying vec4 v_Normal;\n' +
'void main() {\n' +
' gl_Position = u_MvpMatrix * a_Position;\n' + //設定頂點的坐標
' v_Color = a_Color;\n' +
' v_Normal = a_Normal;\n' +
'}\n';
// 片元著色器程式
var FSHADER_SOURCE =
'precision mediump float;\n' +
'uniform vec3 u_DiffuseLight;\n' + // 漫反射光顏色
'uniform vec3 u_LightDirection;\n' + // 漫反射光的方向
'uniform vec3 u_AmbientLight;\n' + // 環境光顏色
'varying vec4 v_Color;\n' +
'varying vec4 v_Normal;\n' +
'void main() {\n' +
//對法向量歸一化
' vec3 normal = normalize(v_Normal.xyz);\n' +
//計算光線向量與法向量的點積
' float nDotL = max(dot(u_LightDirection, normal), 0.0);\n' +
//計算漫發射光的顏色
' vec3 diffuse = u_DiffuseLight * v_Color.rgb * nDotL;\n' +
//計算環境光的顏色
' vec3 ambient = u_AmbientLight * v_Color.rgb;\n' +
' gl_FragColor = vec4(diffuse+ambient, v_Color.a);\n' +
'}\n';
//定義一個矩形體:混合建構式原型模式
function Cuboid(minX, maxX, minY, maxY, minZ, maxZ) {
this.minX = minX;
this.maxX = maxX;
this.minY = minY;
this.maxY = maxY;
this.minZ = minZ;
this.maxZ = maxZ;
}
Cuboid.prototype = {
constructor: Cuboid,
CenterX: function () {
return (this.minX + this.maxX) / 2.0;
},
CenterY: function () {
return (this.minY + this.maxY) / 2.0;
},
CenterZ: function () {
return (this.minZ + this.maxZ) / 2.0;
},
LengthX: function () {
return (this.maxX - this.minX);
},
LengthY: function () {
return (this.maxY - this.minY);
}
}
//定義DEM
function Terrain() {}
Terrain.prototype = {
constructor: Terrain,
setWH: function (col, row) {
this.col = col;
this.row = row;
}
}
var currentAngle = [0.0, 0.0]; // 繞X軸Y軸的旋轉角度 ([x-axis, y-axis])
var curScale = 1.0; //當前的縮放比例
function main() {
var demFile = document.getElementById('demFile');
if (!demFile) {
console.log("Failed to get demFile element!");
return;
}
demFile.addEventListener("change", function (event) {
//判斷瀏覽器是否支持FileReader介面
if (typeof FileReader == 'undefined') {
console.log("你的瀏覽器不支持FileReader介面!");
return;
}
var input = event.target;
var reader = new FileReader();
reader.onload = function () {
if (reader.result) {
//讀取
var terrain = new Terrain();
if (!readDEMFile(reader.result, terrain)) {
console.log("檔案格式有誤,不能讀取該檔案!");
}
//繪制
onDraw(gl, canvas, terrain);
}
}
reader.readAsText(input.files[0]);
});
// 獲取 <canvas> 元素
var canvas = document.getElementById('webgl');
// 獲取WebGL渲染背景關系
var gl = getWebGLContext(canvas);
if (!gl) {
console.log('Failed to get the rendering context for WebGL');
return;
}
// 初始化著色器
if (!initShaders(gl, VSHADER_SOURCE, FSHADER_SOURCE)) {
console.log('Failed to intialize shaders.');
return;
}
// 指定清空<canvas>的顏色
gl.clearColor(0.0, 0.0, 0.0, 1.0);
// 開啟深度測驗
gl.enable(gl.DEPTH_TEST);
//清空顏色和深度緩沖區
gl.clear(gl.COLOR_BUFFER_BIT | gl.DEPTH_BUFFER_BIT);
}
//繪制函式
function onDraw(gl, canvas, terrain) {
// 設定頂點位置
var n = initVertexBuffers(gl, terrain);
if (n < 0) {
console.log('Failed to set the positions of the vertices');
return;
}
//注冊滑鼠事件
initEventHandlers(canvas);
//設定燈光
setLight(gl);
//繪制函式
var tick = function () {
//設定MVP矩陣
setMVPMatrix(gl, canvas, terrain.cuboid);
//清空顏色和深度緩沖區
gl.clear(gl.COLOR_BUFFER_BIT | gl.DEPTH_BUFFER_BIT);
//繪制矩形體
gl.drawElements(gl.TRIANGLES, n, gl.UNSIGNED_SHORT, 0);
//請求瀏覽器呼叫tick
requestAnimationFrame(tick);
};
//開始繪制
tick();
}
//設定燈光
function setLight(gl) {
var u_AmbientLight = gl.getUniformLocation(gl.program, 'u_AmbientLight');
var u_DiffuseLight = gl.getUniformLocation(gl.program, 'u_DiffuseLight');
var u_LightDirection = gl.getUniformLocation(gl.program, 'u_LightDirection');
if (!u_DiffuseLight || !u_LightDirection || !u_AmbientLight) {
console.log('Failed to get the storage location');
return;
}
//設定漫反射光
gl.uniform3f(u_DiffuseLight, 1.0, 1.0, 1.0);
// 設定光線方向(世界坐標系下的)
var solarAltitude = 45.0;
var solarAzimuth = 315.0;
var fAltitude = solarAltitude * Math.PI / 180; //光源高度角
var fAzimuth = solarAzimuth * Math.PI / 180; //光源方位角
var arrayvectorX = Math.cos(fAltitude) * Math.cos(fAzimuth);
var arrayvectorY = Math.cos(fAltitude) * Math.sin(fAzimuth);
var arrayvectorZ = Math.sin(fAltitude);
var lightDirection = new Vector3([arrayvectorX, arrayvectorY, arrayvectorZ]);
lightDirection.normalize(); // Normalize
gl.uniform3fv(u_LightDirection, lightDirection.elements);
//設定環境光
gl.uniform3f(u_AmbientLight, 0.2, 0.2, 0.2);
}
//讀取DEM函式
function readDEMFile(result, terrain) {
var stringlines = result.split("\n");
if (!stringlines || stringlines.length <= 0) {
return false;
}
//讀取頭資訊
var subline = stringlines[0].split("\t");
if (subline.length != 6) {
return false;
}
var col = parseInt(subline[4]); //DEM寬
var row = parseInt(subline[5]); //DEM高
var verticeNum = col * row;
if (verticeNum + 1 > stringlines.length) {
return false;
}
terrain.setWH(col, row);
//讀取點資訊
var ci = 0;
var pSize = 9;
terrain.verticesColors = new Float32Array(verticeNum * pSize);
for (var i = 1; i < stringlines.length; i++) {
if (!stringlines[i]) {
continue;
}
var subline = stringlines[i].split(',');
if (subline.length != pSize) {
continue;
}
for (var j = 0; j < pSize; j++) {
terrain.verticesColors[ci] = parseFloat(subline[j]);
ci++;
}
}
if (ci !== verticeNum * pSize) {
return false;
}
//包圍盒
var minX = terrain.verticesColors[0];
var maxX = terrain.verticesColors[0];
var minY = terrain.verticesColors[1];
var maxY = terrain.verticesColors[1];
var minZ = terrain.verticesColors[2];
var maxZ = terrain.verticesColors[2];
for (var i = 0; i < verticeNum; i++) {
minX = Math.min(minX, terrain.verticesColors[i * pSize]);
maxX = Math.max(maxX, terrain.verticesColors[i * pSize]);
minY = Math.min(minY, terrain.verticesColors[i * pSize + 1]);
maxY = Math.max(maxY, terrain.verticesColors[i * pSize + 1]);
minZ = Math.min(minZ, terrain.verticesColors[i * pSize + 2]);
maxZ = Math.max(maxZ, terrain.verticesColors[i * pSize + 2]);
}
terrain.cuboid = new Cuboid(minX, maxX, minY, maxY, minZ, maxZ);
return true;
}
//注冊滑鼠事件
function initEventHandlers(canvas) {
var dragging = false; // Dragging or not
var lastX = -1,
lastY = -1; // Last position of the mouse
//滑鼠按下
canvas.onmousedown = function (ev) {
var x = ev.clientX;
var y = ev.clientY;
// Start dragging if a moue is in <canvas>
var rect = ev.target.getBoundingClientRect();
if (rect.left <= x && x < rect.right && rect.top <= y && y < rect.bottom) {
lastX = x;
lastY = y;
dragging = true;
}
};
//滑鼠離開時
canvas.onmouseleave = function (ev) {
dragging = false;
};
//滑鼠釋放
canvas.onmouseup = function (ev) {
dragging = false;
};
//滑鼠移動
canvas.onmousemove = function (ev) {
var x = ev.clientX;
var y = ev.clientY;
if (dragging) {
var factor = 100 / canvas.height; // The rotation ratio
var dx = factor * (x - lastX);
var dy = factor * (y - lastY);
currentAngle[0] = currentAngle[0] + dy;
currentAngle[1] = currentAngle[1] + dx;
}
lastX = x, lastY = y;
};
//滑鼠縮放
canvas.onmousewheel = function (event) {
if (event.wheelDelta > 0) {
curScale = curScale * 1.1;
} else {
curScale = curScale * 0.9;
}
};
}
//設定MVP矩陣
function setMVPMatrix(gl, canvas, cuboid) {
// Get the storage location of u_MvpMatrix
var u_MvpMatrix = gl.getUniformLocation(gl.program, 'u_MvpMatrix');
if (!u_MvpMatrix) {
console.log('Failed to get the storage location of u_MvpMatrix');
return;
}
//模型矩陣
var modelMatrix = new Matrix4();
modelMatrix.scale(curScale, curScale, curScale);
modelMatrix.rotate(currentAngle[0], 1.0, 0.0, 0.0); // Rotation around x-axis
modelMatrix.rotate(currentAngle[1], 0.0, 1.0, 0.0); // Rotation around y-axis
modelMatrix.translate(-cuboid.CenterX(), -cuboid.CenterY(), -cuboid.CenterZ());
//投影矩陣
var fovy = 60;
var near = 1;
var projMatrix = new Matrix4();
projMatrix.setPerspective(fovy, canvas.width / canvas.height, 1, 10000);
//計算lookAt()函式初始視點的高度
var angle = fovy / 2 * Math.PI / 180.0;
var eyeHight = (cuboid.LengthY() * 1.2) / 2.0 / angle;
//視圖矩陣
var viewMatrix = new Matrix4(); // View matrix
viewMatrix.lookAt(0, 0, eyeHight, 0, 0, 0, 0, 1, 0);
//MVP矩陣
var mvpMatrix = new Matrix4();
mvpMatrix.set(projMatrix).multiply(viewMatrix).multiply(modelMatrix);
//將MVP矩陣傳輸到著色器的uniform變數u_MvpMatrix
gl.uniformMatrix4fv(u_MvpMatrix, false, mvpMatrix.elements);
}
//
function initVertexBuffers(gl, terrain) {
//DEM的一個網格是由兩個三角形組成的
// 0------1 1
// | |
// | |
// col col------col+1
var col = terrain.col;
var row = terrain.row;
var indices = new Uint16Array((row - 1) * (col - 1) * 6);
var ci = 0;
for (var yi = 0; yi < row - 1; yi++) {
//for (var yi = 0; yi < 10; yi++) {
for (var xi = 0; xi < col - 1; xi++) {
indices[ci * 6] = yi * col + xi;
indices[ci * 6 + 1] = (yi + 1) * col + xi;
indices[ci * 6 + 2] = yi * col + xi + 1;
indices[ci * 6 + 3] = (yi + 1) * col + xi;
indices[ci * 6 + 4] = (yi + 1) * col + xi + 1;
indices[ci * 6 + 5] = yi * col + xi + 1;
ci++;
}
}
//
var verticesColors = terrain.verticesColors;
var FSIZE = verticesColors.BYTES_PER_ELEMENT; //陣列中每個元素的位元組數
// 創建緩沖區物件
var vertexColorBuffer = gl.createBuffer();
var indexBuffer = gl.createBuffer();
if (!vertexColorBuffer || !indexBuffer) {
console.log('Failed to create the buffer object');
return -1;
}
// 將緩沖區物件系結到目標
gl.bindBuffer(gl.ARRAY_BUFFER, vertexColorBuffer);
// 向緩沖區物件寫入資料
gl.bufferData(gl.ARRAY_BUFFER, verticesColors, gl.STATIC_DRAW);
//獲取著色器中attribute變數a_Position的地址
var a_Position = gl.getAttribLocation(gl.program, 'a_Position');
if (a_Position < 0) {
console.log('Failed to get the storage location of a_Position');
return -1;
}
// 將緩沖區物件分配給a_Position變數
gl.vertexAttribPointer(a_Position, 3, gl.FLOAT, false, FSIZE * 9, 0);
// 連接a_Position變數與分配給它的緩沖區物件
gl.enableVertexAttribArray(a_Position);
//獲取著色器中attribute變數a_Color的地址
var a_Color = gl.getAttribLocation(gl.program, 'a_Color');
if (a_Color < 0) {
console.log('Failed to get the storage location of a_Color');
return -1;
}
// 將緩沖區物件分配給a_Color變數
gl.vertexAttribPointer(a_Color, 3, gl.FLOAT, false, FSIZE * 9, FSIZE * 3);
// 連接a_Color變數與分配給它的緩沖區物件
gl.enableVertexAttribArray(a_Color);
// 向緩沖區物件分配a_Normal變數,傳入的這個變數要在著色器使用才行
var a_Normal = gl.getAttribLocation(gl.program, 'a_Normal');
if (a_Normal < 0) {
console.log('Failed to get the storage location of a_Normal');
return -1;
}
gl.vertexAttribPointer(a_Normal, 3, gl.FLOAT, false, FSIZE * 9, FSIZE * 6);
//開啟a_Normal變數
gl.enableVertexAttribArray(a_Normal);
// 將頂點索引寫入到緩沖區物件
gl.bindBuffer(gl.ELEMENT_ARRAY_BUFFER, indexBuffer);
gl.bufferData(gl.ELEMENT_ARRAY_BUFFER, indices, gl.STATIC_DRAW);
return indices.length;
}
3.2. 改動詳解
3.2.1. 設定日照
主要改動是在繪制函式onDraw()中添加了一個設定光照的函式setLight():
//繪制函式
function onDraw(gl, canvas, terrain) {
//...
//注冊滑鼠事件
initEventHandlers(canvas);
//設定燈光
setLight(gl);
//繪制函式
var tick = function () {
//...
};
//開始繪制
tick();
}
具體展開這個函式,可以看到這段代碼主要是給著色器傳入了環境光顏色u_AmbientLight、漫反射光顏色u_DiffuseLight、漫反射光方向u_LightDirection這三個引數,環境光顏色是由其他物體反射照成的,所以環境光強度較弱,設定為(0.2,0.2,0.2),這里用漫反射光顏色來模擬太陽光,可以設為最強(1.0,1.0,1.0):
//設定燈光
function setLight(gl) {
var u_AmbientLight = gl.getUniformLocation(gl.program, 'u_AmbientLight');
var u_DiffuseLight = gl.getUniformLocation(gl.program, 'u_DiffuseLight');
var u_LightDirection = gl.getUniformLocation(gl.program, 'u_LightDirection');
if (!u_DiffuseLight || !u_LightDirection || !u_AmbientLight) {
console.log('Failed to get the storage location');
return;
}
//設定漫反射光
gl.uniform3f(u_DiffuseLight, 1.0, 1.0, 1.0);
//...
gl.uniform3fv(u_LightDirection, lightDirection.elements);
//設定環境光
gl.uniform3f(u_AmbientLight, 0.2, 0.2, 0.2);
}
前面提到過,太陽光是一種平行光,所以只需要設定方向就行了,這個方向的計算與兩個地理學引數太陽高度角solarAltitude和太陽方位角solarAzimuth有關,可以暫時不用去關注其具體的推算細節(可參看我的另外一篇博文通過OSG實作對模型的日照模擬第二節和第四節),只需要知道這里的漫反射方向不是隨意指定,是根據實際情況引數計算出來的,
function setLight(gl) {
{
//...
// 設定光線方向(世界坐標系下的)
var solarAltitude = 45.0;
var solarAzimuth = 315.0;
var fAltitude = solarAltitude * Math.PI / 180; //光源高度角
var fAzimuth = solarAzimuth * Math.PI / 180; //光源方位角
var arrayvectorX = Math.cos(fAltitude) * Math.cos(fAzimuth);
var arrayvectorY = Math.cos(fAltitude) * Math.sin(fAzimuth);
var arrayvectorZ = Math.sin(fAltitude);
var lightDirection = new Vector3([arrayvectorX, arrayvectorY, arrayvectorZ]);
lightDirection.normalize(); // Normalize
//...
}
3.2.2. 著色器光照設定
這里頂點著色器中并沒有用到傳入的光照引數,而是把頂點緩沖區物件的顏色值和法向量值保存為varying變數,用來傳入片元緩沖區:
// 頂點著色器程式
var VSHADER_SOURCE =
'attribute vec4 a_Position;\n' + //位置
'attribute vec4 a_Color;\n' + //顏色
'attribute vec4 a_Normal;\n' + //法向量
'uniform mat4 u_MvpMatrix;\n' +
'varying vec4 v_Color;\n' +
'varying vec4 v_Normal;\n' +
'void main() {\n' +
' gl_Position = u_MvpMatrix * a_Position;\n' + //設定頂點的坐標
' v_Color = a_Color;\n' +
' v_Normal = a_Normal;\n' +
'}\n';
在片元緩沖區中,傳入到片元緩沖區的顏色值和法向量值都經過了內插,變成了每個片元的基底色和法向量值,將該法向量歸一化,與傳入的漫反射方向做點積,得到漫反射入射角,漫反射入射角與傳入的漫反射光強度以及片元基底色,根據公式(2)計算漫反射光顏色,片元基底色與傳入的環境光顏色,根據公式(1)計算環境反射光顏色,根據公式(3)將兩者相加,得到最終顯示的片元顏色,
// 片元著色器程式
var FSHADER_SOURCE =
'precision mediump float;\n' +
'uniform vec3 u_DiffuseLight;\n' + // 漫反射光顏色
'uniform vec3 u_LightDirection;\n' + // 漫反射光的方向
'uniform vec3 u_AmbientLight;\n' + // 環境光顏色
'varying vec4 v_Color;\n' +
'varying vec4 v_Normal;\n' +
'void main() {\n' +
//對法向量歸一化
' vec3 normal = normalize(v_Normal.xyz);\n' +
//計算光線向量與法向量的點積
' float nDotL = max(dot(u_LightDirection, normal), 0.0);\n' +
//計算漫發射光的顏色
' vec3 diffuse = u_DiffuseLight * v_Color.rgb * nDotL;\n' +
//計算環境光的顏色
' vec3 ambient = u_AmbientLight * v_Color.rgb;\n' +
' gl_FragColor = vec4(diffuse+ambient, v_Color.a);\n' +
'}\n';
4. 結果
瀏覽器最終顯示的結果如下:
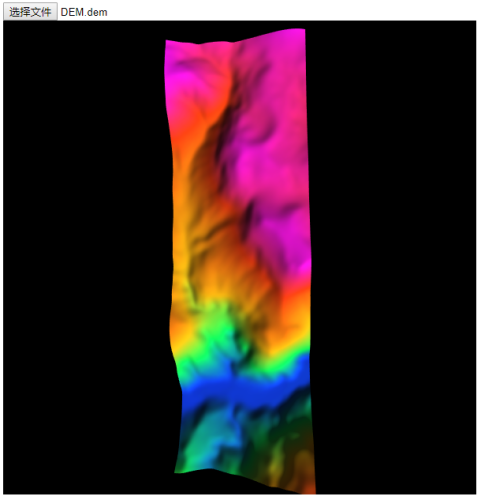
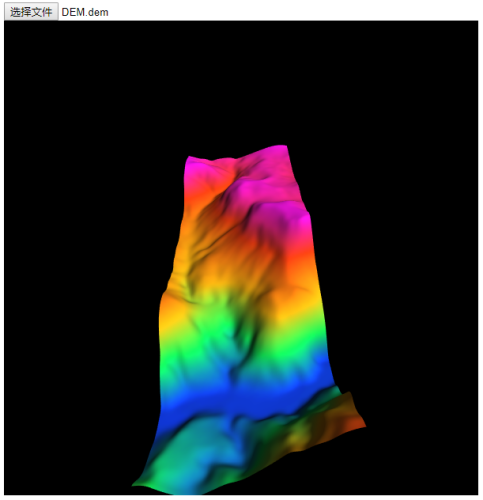
相比上一篇教程的渲染效果,可以明顯發現立體感增強,能夠清楚看到地形的起伏情況,
5. 參考
本來部分代碼和插圖來自《WebGL編程指南》,源代碼鏈接:地址 ,會在此共享目錄中持續更新后續的內容,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/3807.html
標籤:其他