VisionPro8.2 + C#_學習之路1_直線檢測
- 注
- 確定流程
- 1.旋轉影像
- 2.模板匹配—標定—坐標系定位
- 3.檢測線段
- 4.總結
本人最近剛入visionpro與C#界面編程的坑,所以準備邊學習邊在此做個記錄,并且與大家分享學習程序中遇到的困難與識訓的心得,若存在錯誤以及不足之處,請多多指教,
注
1 本次專案中并不需要在visionPro中撰寫腳本,若后續有腳本輔助,會在此提醒,
2 流程圖中的連線,最好是設定完一個工具再連下一個,這樣的話會方便自己理解,一步一個腳印
確定流程
首先,確定專案需求,需求為:檢測輸入影像中的某條線段,并且影像如何旋轉,依舊能夠檢測出該條線段,所以可以分為如下步驟實作該需求,
1.旋轉影像
2.模板匹配—標定—坐標系定位 (為了確定一個坐標系的基準,確保影像無論如何旋轉,都可以得到當前坐標系與基準坐標系的變換關系)
3.檢測線段
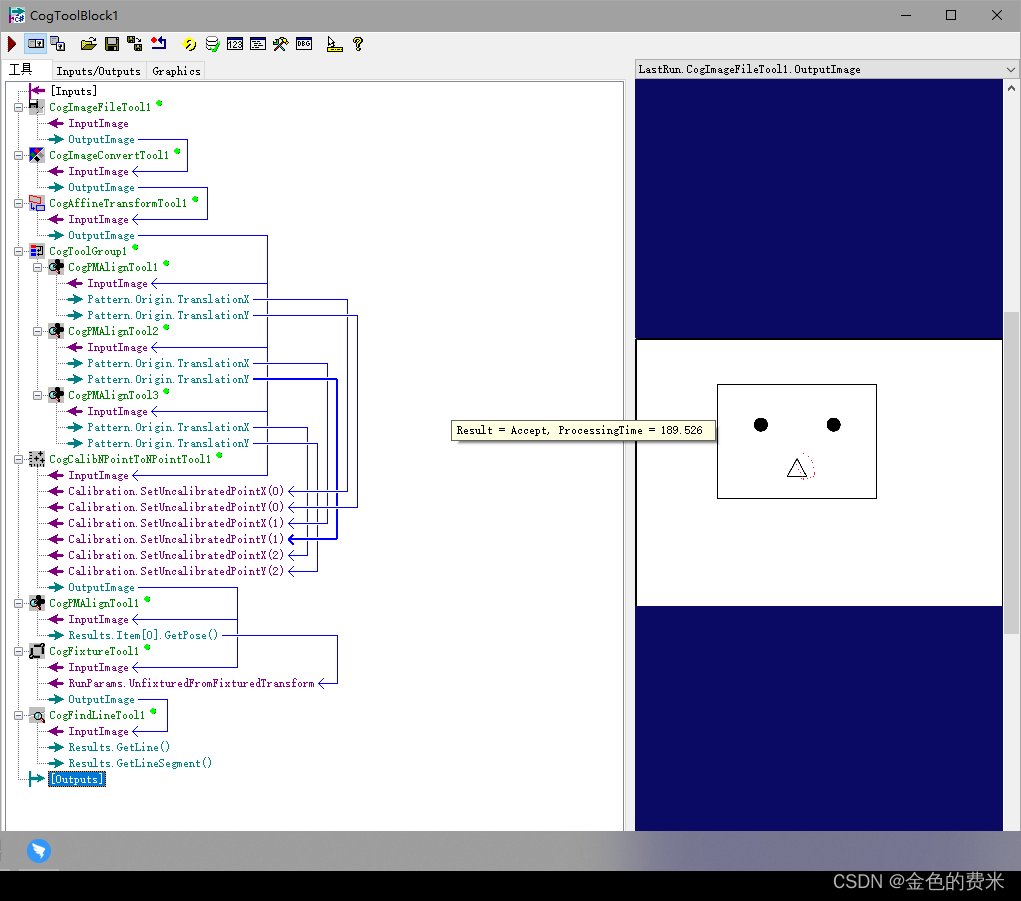
流程圖如下所示:
1.旋轉影像
影像旋轉:
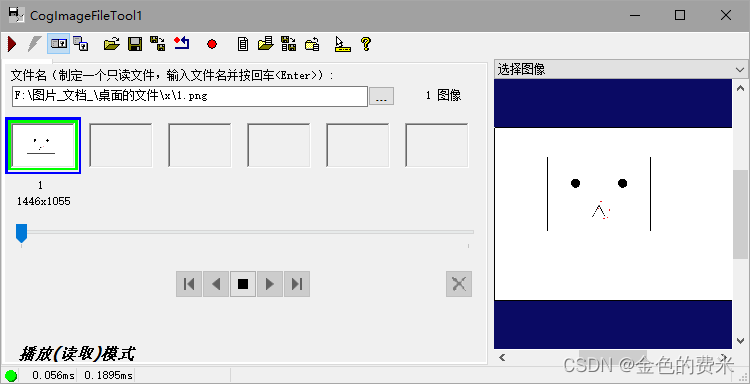
第一步:加載想要旋轉的影像,在這里用了“CogImageFileTool”工具,CogImageFileTool主要的作用就是加載本地影像或者保存最終影像至本地的某個位置,
第二步:用到了仿射變換工具“CogAffineTransformTool”,
首先設定區域形狀(就是一個包含目標影像的矩形框),我這里用的是CogRectangleAffine,作用就是框選想要進行仿射變換的區域,
因為仿射變換做旋轉,本質是對這個框做旋轉,只不過這個框在旋轉前后,在輸出影像中是看不到的(這一點我說的也有些迷糊,實際操作幾次就都明白了),反正就是框逆時針旋轉30°,對應的影像看起來是順時針旋轉了30°(就是坐標系發生了改變)
工具界面中有一個區域,名為選擇模式,注意當前選擇的是原點、中心、還是3點,我這里選擇的是中心,框的中心就是影像的中心,框的邊長就是影像的邊長,旋轉和傾斜暫時設為 0 就行,
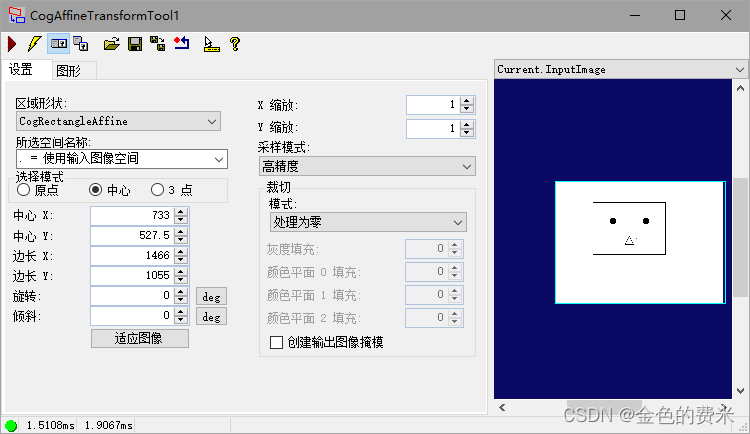
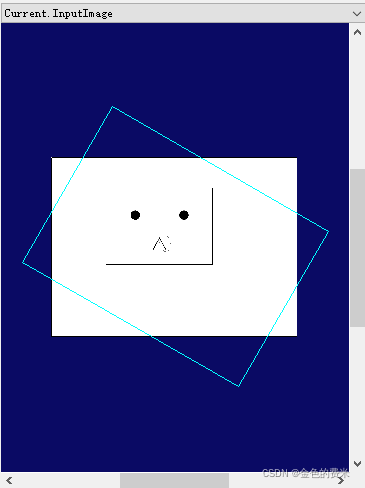
這是可以設定一下旋轉為30(deg是角度制,rad是弧度制),點擊左上角運行,可以發現右面顯示區域Current.InputImage中的框變成了這樣,
此時可以看到LastRun.OutputImage是這樣的
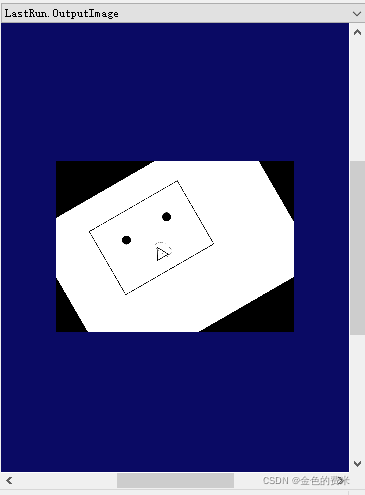
這樣就完成了影像的旋轉,
2.模板匹配—標定—坐標系定位
之前為了測驗,將CogRectangleAffine中的旋轉設為了30,現在將它設定成0,然后就不要動了,開始下面的流程了,
接下來就是模板匹配了,可以看到,影像中最有效的特征就為兩個圓形的眼睛,一個三角形的嘴,因此我們要將這三個特征標記出來,作為我們的模板,哪怕將圖旋轉后,也能夠檢測出我們的這三個特征,
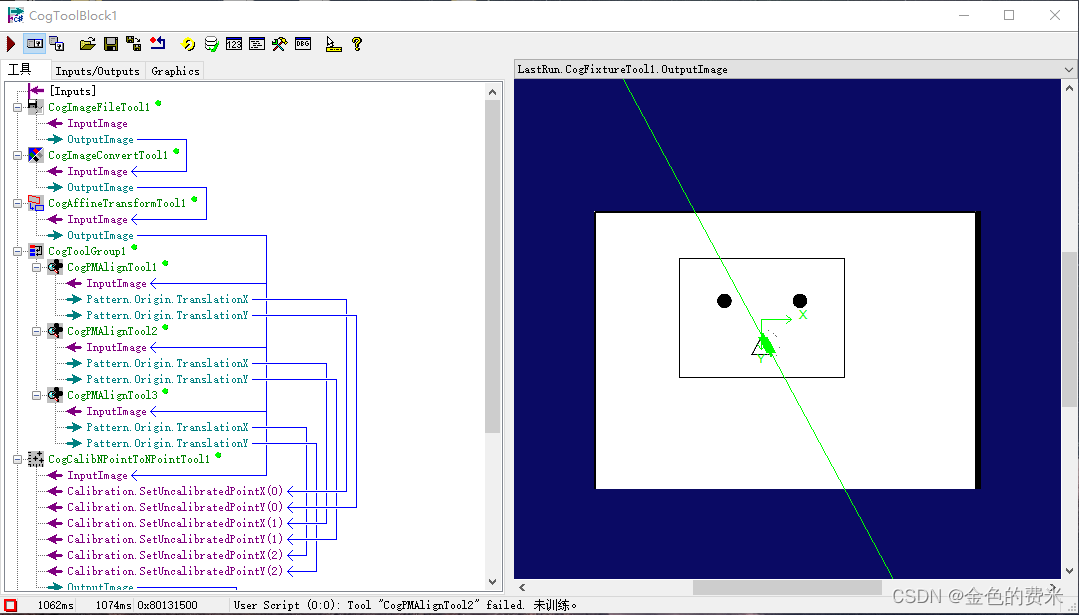
第一步:模板匹配
我首先引入了一個CogToolGroup,這個工具的作用就是分塊并不對整個流程的運行造成影響,把重復性的工具都放在這里,讓整個流程圖看起來更加簡潔,
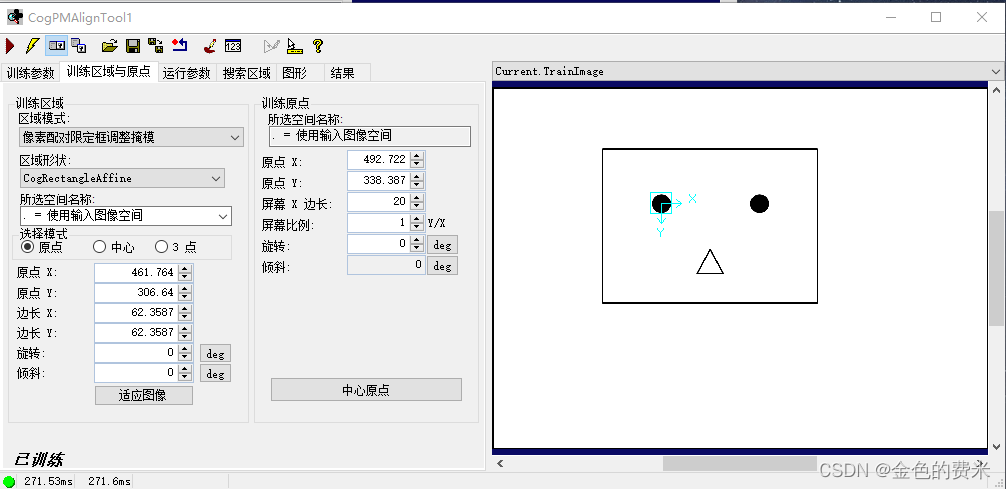
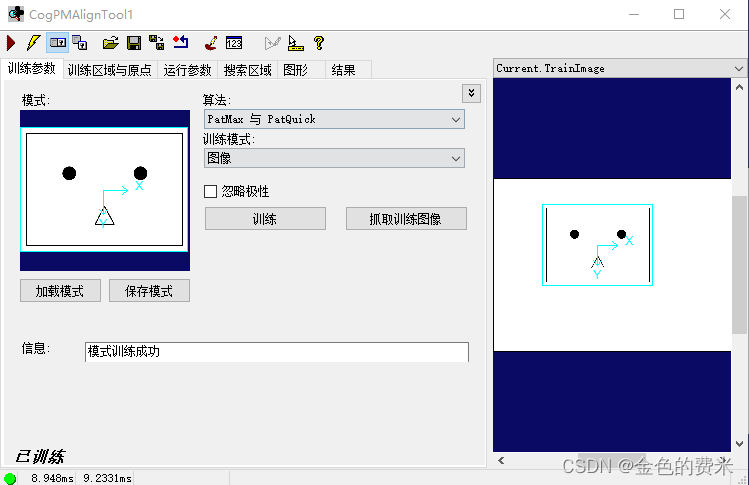
模板匹配用到的工具是CogPMAlignTool,界面是這樣的,
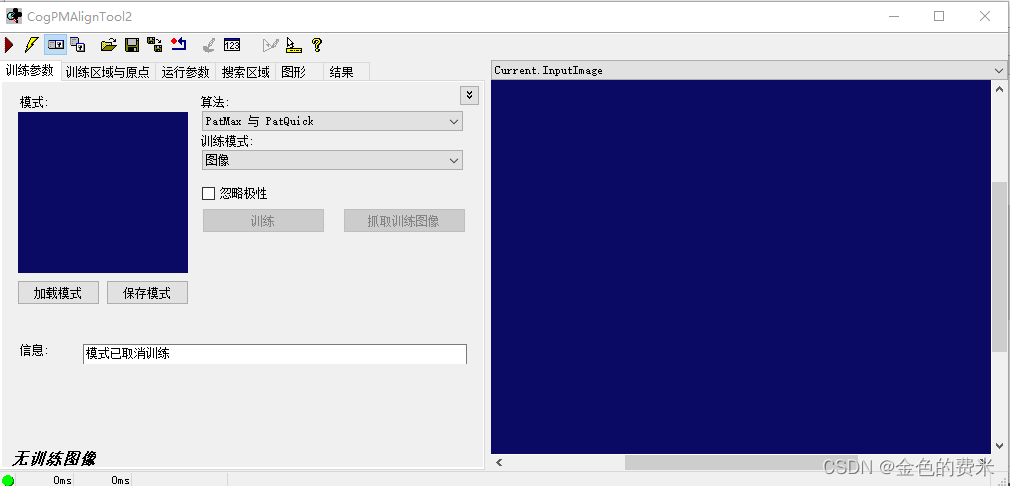
1.點擊“抓取訓練影像”,然后在右側顯示區域的下拉串列中選擇Current.TrainImage,
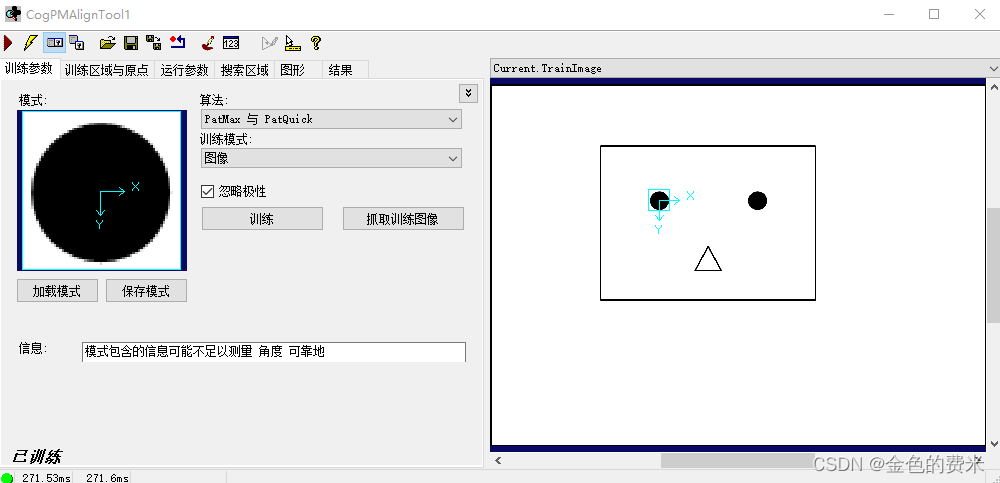
2,在工具列中選擇“訓練區域與原點”,在這里面可以看到區域模式、形狀、模式啥的,反正就用這個框,把左面的眼睛包住,然后訓練原點移到眼睛中心就行,(最初框和中心都在左上角),
3. 點工具列中的運行引數,區域中的角度默認是標稱值,我們要將其變為下限-180,上限180,因為影像后續要進行旋轉,縮放弄成0.8~1.2,
右上角的接受閾值就是先計算出目標與模板之間的一個分數,分數高于閾值的就算它是匹配上的目標,低于閾值的就被舍棄了,
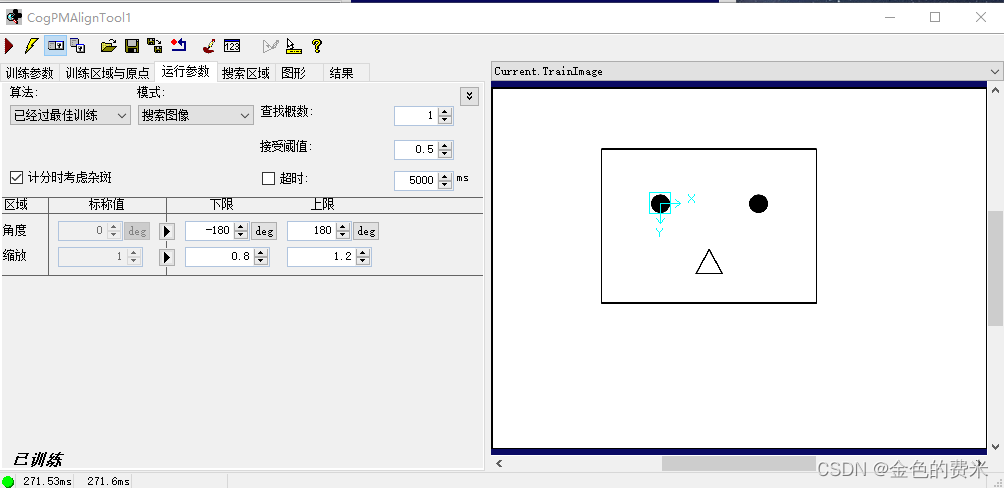
剩下的搜索區域,圖形默認就行,
一切引數設定好了后,回到“訓練引數”中,點擊“訓練”,這樣這個模板就訓練完了,
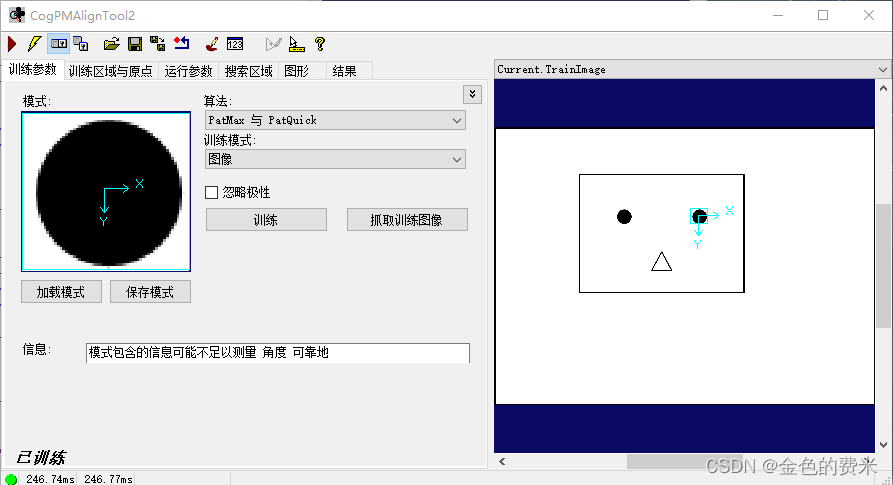
右眼和嘴的模板匹配和左眼的流程一樣,就不多說了,貼兩張圖得了,
右眼圖:
嘴的圖:
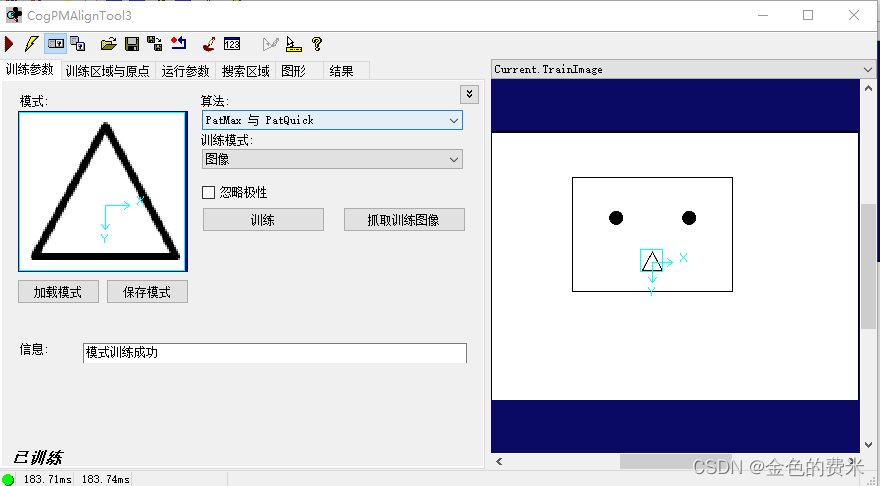
模板匹配這樣就完成了,如果檢測出了多個目標,調整接受閾值的大小就可以解決這個問題,
第二步:影像標定
利用 CogCalibPointToPointTool 工具,界面是這樣的
1 首先還是點擊“抓取校正影像”,然后:
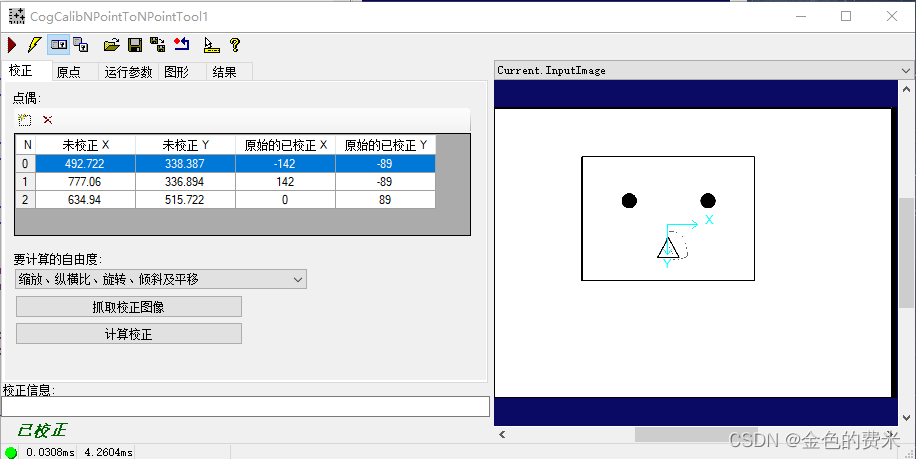
2 還記得上面模板匹配中,每個模板,都有一個框和一個中心,中心坐標為Patter.Origin.TranslationX與Patter.Origin.TranslationY(自己到終端里添加)
一共三個模板,所以有三組坐標,分別代表著左眼,右眼,嘴的中心,
將這三組坐標傳入CogCalibPointToPointTool中去,可以在界面中看到,未校正X和未校正Y中,每一行就代表著我們傳入的中心坐標,
原始的已校正的X和Y是自己算的 (這一塊我說的比較拗口,多試幾次就明白了),那究竟是怎么算的呢?未校正的X,Y,是在影像坐標系中的坐標,影像坐標系以左上角為原點(0,0),而我們現在發現,左眼右眼是水平對稱的,所以我們可以構建一個新的坐標系,令“嘴的中心” 與 “左眼右眼連線的中間點” 的中間點 為新坐標系下的(0,0)點,這樣的話,根據未校正X,Y的三個中心間的坐標關系,可以計算出當前坐標系下的三個中心的坐標,然后將其輸入至原始的已校正的X,Y中,
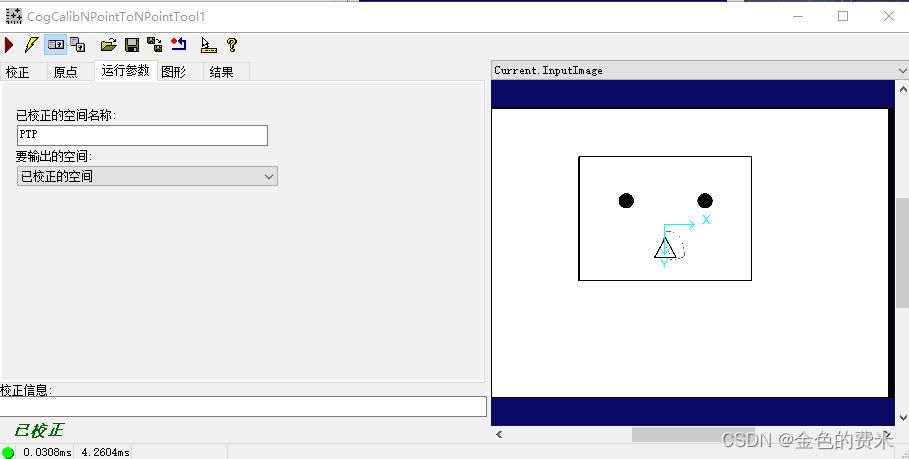
3.工具列 “運行引數”中已校正的空間名稱可以根據其起到的作用自定義,方便后續參考,我這里就起名為“PTP”
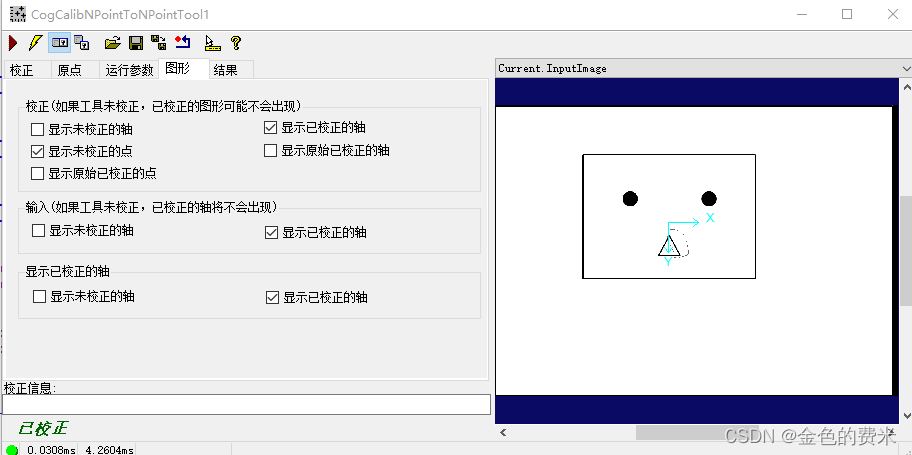
4. 工具列“圖形”中像這樣就行,
一切引數都設定好了后,點擊工具列“校正”中的計算校正,然后點擊左上角的紅色三角鍵,這樣的話就標定好了,標定的作用就是無論影像怎么旋轉,只要有三個特征目標的中心點,那么就能夠與原始的已校正的三個點對應上,進而計算出校正轉換的結果
第三步:再來一次模板匹配,這一就是將目標整體包圍進去了,和上面的模板匹配步驟一樣,只不過是這次框選的是整張臉,
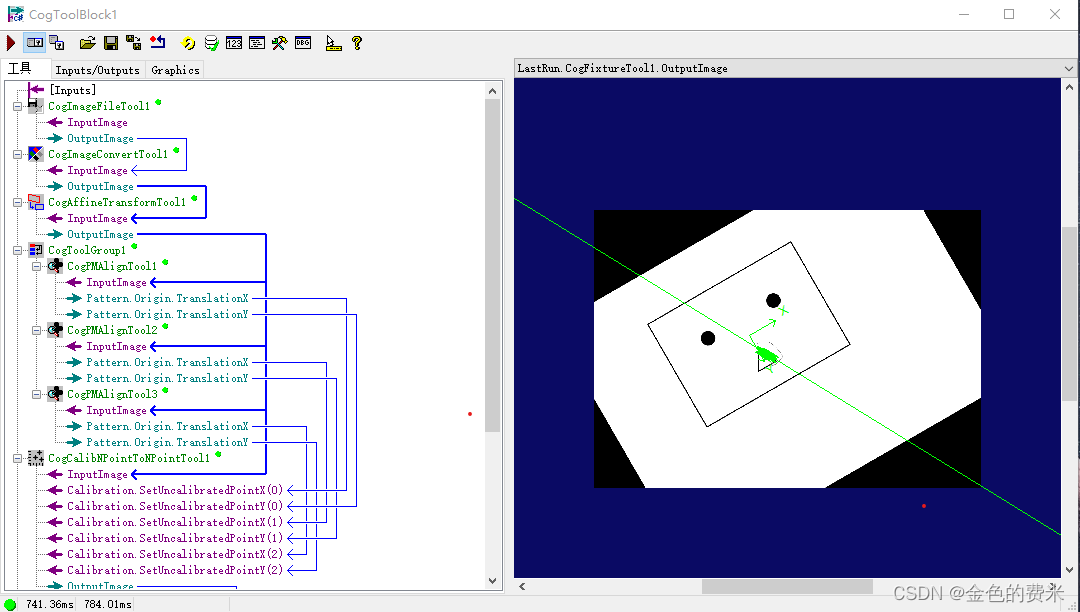
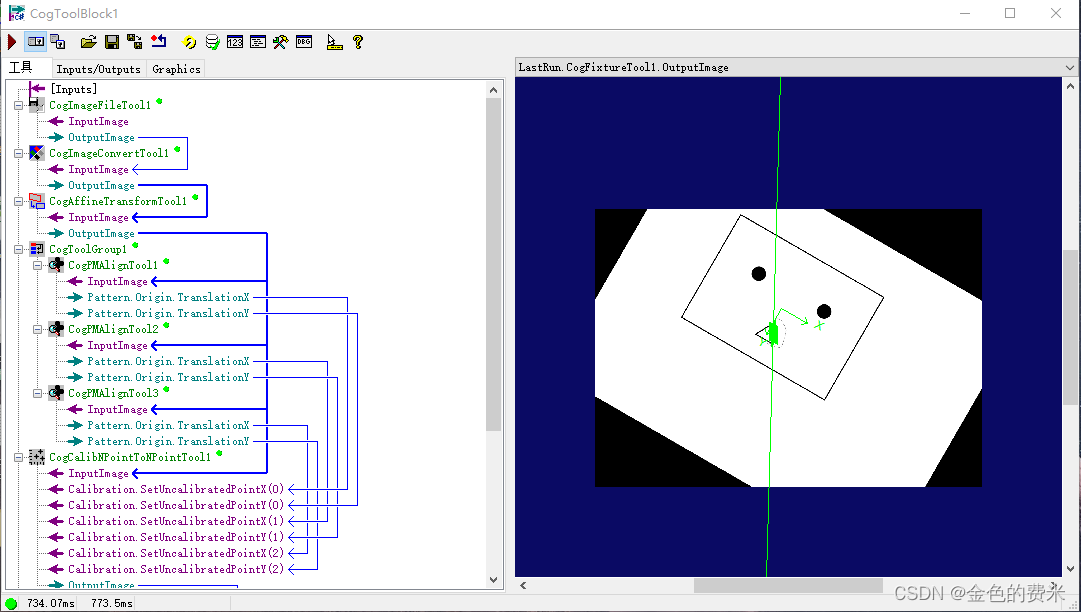
第四步:坐標點的定位
用到了CogFixtureTool
首先按流程圖連線,之后界面是這樣的,照著設定就行,
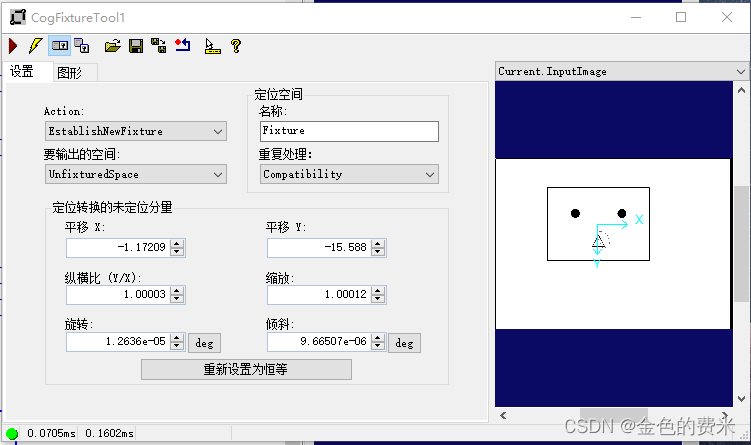
設定完了點左上角紅色三角鍵,這個的作用是定位,里面的一些引數設定我也不太理解,以后再說吧,先知道要實作某個功能,都是哪幾個工具組合就行,
經過CogFixtureTool處理后會輸出一個影像,我們就在這個影像上找線段,
3.檢測線段
利用CogFindLineTool工具可以檢測影像中的線段,但是你得先知道線段的大概位置,界面如下所示,
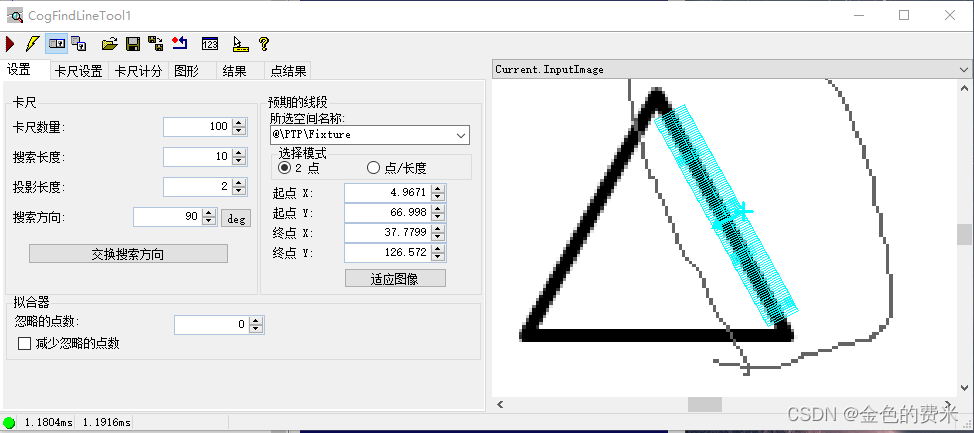
1 我這里設定了100個卡尺,搜索長度就是每個卡尺的縱向長度,投影長度就是切向長度,搜索方向就看卡尺上面的箭頭就行,無非就是從里向外搜索或者從外向里搜索,我這里是從外向里搜索,
關鍵是所選空間名稱,
還記得 “模板匹配—標定—坐標系定位” 的 第二步“影像標定” 的 第三點中,我們設定了輸出的已校正的空間名稱為PTP,所以這里就要選擇PTP\Fixture,指的就是標定再定位的空間,
2 卡尺設定中,我們想找一條線段,不用找邊緣對,所以選擇“單個邊緣”,極性選擇任何極性就行,
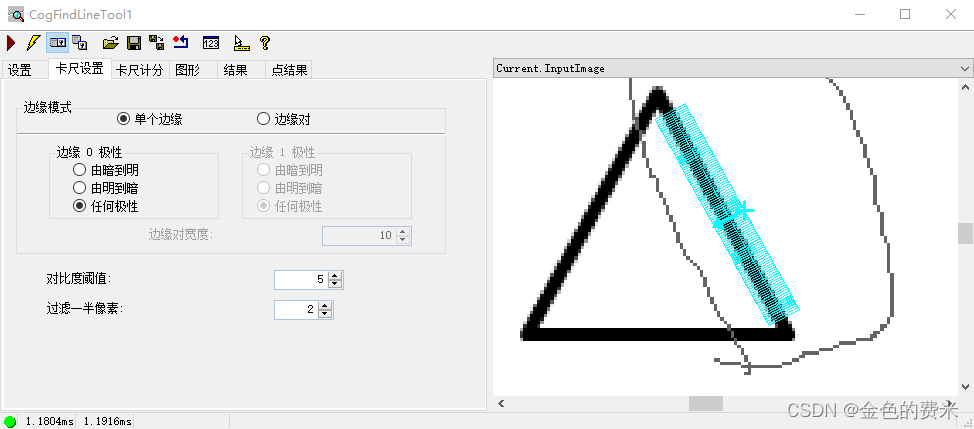
過濾一半像素主要用于邊緣篩選,其目的主要為了消除噪聲和增強峰值,具體我說不明白,可以參見這位大哥寫的文章卡尺工具原理講解
對比度閾值:實際上就是實際影像中邊緣兩側的像素差值 ,小于對比度閾值的邊會被忽略,大于對比度閾值的邊會被保留,
擬合器中忽略的點數指,舉個栗子:我用M個卡尺,假設找到了N個點(因為不能保證每個卡尺都找到符合條件的點),但是我只想用N-5個點擬合,因為我覺得有一些點擬合之后效果并不好,所以忽略的點數就要設定為5,忽略的是找到的點中分數最低的5個點,當然這只是個大白話的例子,目的就是希望大家能夠理解,
所有引數設定好了之后,就可以點擊左上角紅色三角鍵運行了
至此,所有引數都設定好了,運行一下,
旋轉0°:
旋轉30°:
旋轉 -30°
4.總結
其實這個例子很簡單,就是參照官方示例的“Calibration And Fixturing”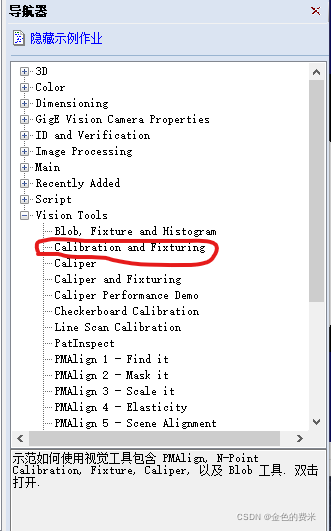
學習的意義主要是把模板匹配,標定,定位那里搞明白了就行,這幾個工具搭配起來使用的范圍還是很廣泛的,后續無論是找線還是找圓都照葫蘆畫瓢就行了,本文可能存在錯別字,有些話說的不透徹,因為我也是剛接觸這門工具,從零開始學習,希望大家能夠多多包涵,有問題一起討論,謝謝,C#的界面設計有時間再發吧,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/382145.html
標籤:其他
上一篇:計算機視覺復習