開始語
新的博客來了,博主繼上個做完智能臺燈專案后一直想做智能小車專案,在做老師給的專案之外抽空做了一下小車;首先強調一下,這個小車只是半成品,按照我的進度只做到50%,寫這篇的博客的目的也是為了記錄做的程序中踩到的坑,其次因為我做這個車借鑒了許多網上的資源,在此衷心感謝,大家做智能小車的很多,資源也很多,但是比較雜亂,我這篇博客也是為了把思路給理清,讓大家想做智能小車的可以有一個比較清晰的思路,
小車功能(目前)
手機通過藍牙連接藍牙串口與STM32F407實作串口通信,使用藍牙對小車進行控制實作不同的行駛模式;
所用到的硬體模塊
1.STM32F407核心板,正點原子出的一款產品,引出了許多管腳,非常適合做硬體開發使用,我現在做老師的專案也是用這一款(沒有廣告費哈~)

2.小車外殼,淘寶一搜一大堆,我買的是4馬達驅動的,雙層亞克力板的,不為別的,就是覺得帥

3.L298N2路步進馬達驅動模塊,由于我有4個輪子,就買了2個

4.JDY-31藍牙轉串口模塊

開發程序
組裝小車
首先把買回來的小車馬達與輪子連好,按照商家說明書組裝應該沒有問題,這里不再贅述;
讓小車動起來
介紹一下L298N模塊
這個模塊是專門用來驅動馬達,可以調整馬達的轉速和轉向;
輸出A的2個埠直接連馬達2根線(不用在意正負,也沒有辦法深究正負);
邏輯輸入IN1和IN2可以輸入 10 01 00用來控制馬達的正轉,反轉,停止(其實這里知道這個原理即可,因為你并不知道輸出口與馬達接的正負關系,都是要在后續程式上除錯出來);
12V供電可以接7~15V的都可以,不要高于24V即可,5V供電口可以當作一個電源輸出口使用,非常方便;
通道A使能口接入PWM信號來控制馬達速度,當然1占比越多速度越快


使用MCU輸出4路的PWM信號控制4個馬達轉速和輸出8路電平信號控制馬達轉向實作小車前進左轉后退等行駛模式
按照前面的模塊說明,首先控制轉向;每個馬達需要2個邏輯電平控制轉向,4個就需要8個邏輯電平,于是使用MCU輸出8路電平信號;這個就比較容易實作了,直接找到可用的IO口復用為輸出模式即可,我這里選用了PD 0 1 3 4作為后面2個馬達的輸出控制管腳,將其與L298N的IN1 2 3 4用杜邦線連接起來;選用PE 2 3 5 6作為前置2個馬達的輸出控制管腳,組合輸出不同的邏輯電平,就可以讓每個輪子獨立的正轉、反轉或者停止,
//初始化邏輯控制口 GPIOD 0 1 3 4 對應后驅的IN 1234
void IO_Init1 (void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD, ENABLE);//使能GPIOF時鐘
//GPIOF9,F10初始化設定
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1| GPIO_Pin_3| GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//普通輸出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽輸出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOD, &GPIO_InitStructure);//初始化
}
//初始化邏輯控制口 GPIOE 2 3 5 6對應前驅的IN 1234
void IO_Init2 (void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE, ENABLE);//使能GPIOE時鐘
//GPIOF9,F10初始化設定
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_3| GPIO_Pin_5| GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//普通輸出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽輸出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOE, &GPIO_InitStructure);//初始化
}
然后輸出4路PWM信號控制4個馬達的轉速;相信使用過PWM脈寬調制信號的朋友們都知道原理,就不贅述了,我這里說一下我踩的坑,PWM的定時器TIM1可以輸出8路pwm信號,我剛開始想用TIM1輸出,但怎么都配置不對,有4路怎么都出不來信號;最后只能退而求其次選擇了TIM3,輸出4路PWM信號,代碼如下:
// TIM3 通道1234初始化 GPIOC 6789復用為PWM輸出 其中 PC6控制后驅右馬達 PC7控制后驅左馬達
//TIM3 PWM部分初始化
//PWM輸出初始化
//arr:自動重裝值
//psc:時鐘預分頻數
void TIM3_PWM_Init(u32 arr,u32 psc)
{
//此部分需手動修改IO口設定
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); //TIM3時鐘使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE); //使能PORTC時鐘
GPIO_PinAFConfig(GPIOC,GPIO_PinSource6,GPIO_AF_TIM3); //GPIOC6復用為定時器3
GPIO_PinAFConfig(GPIOC,GPIO_PinSource7,GPIO_AF_TIM3); //GPIOC7復用為定時器3
GPIO_PinAFConfig(GPIOC,GPIO_PinSource8,GPIO_AF_TIM3); //GPIOC8復用為定時器3
GPIO_PinAFConfig(GPIOC,GPIO_PinSource9,GPIO_AF_TIM3); //GPIOC9復用為定時器3
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9; //GPIOC6、7 8、9
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //復用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽復用輸出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOC,&GPIO_InitStructure); //初始化PC6、7 8、9
TIM_TimeBaseStructure.TIM_Prescaler=psc; //定時器分頻
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上計數模式
TIM_TimeBaseStructure.TIM_Period=arr; //自動重裝載值
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStructure);//初始化定時器3
//初始化TIM3 Channel1 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //選擇定時器模式:TIM脈沖寬度調制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比較輸出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //輸出極性:TIM輸出比較極性低
TIM_OC1Init(TIM3, &TIM_OCInitStructure); //根據T指定的引數初始化外設TIM1 4OC1
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM14在CCR1上的預裝載暫存器
//初始化TIM3 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //選擇定時器模式:TIM脈沖寬度調制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比較輸出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //輸出極性:TIM輸出比較極性低
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根據T指定的引數初始化外設TIM1 4OC1
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM14在CCR1上的預裝載暫存器
//初始化TIM3 Channel3 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //選擇定時器模式:TIM脈沖寬度調制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比較輸出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //輸出極性:TIM輸出比較極性低
TIM_OC3Init(TIM3, &TIM_OCInitStructure); //根據T指定的引數初始化外設TIM1 4OC1
TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM14在CCR1上的預裝載暫存器
//初始化TIM3 Channel4 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //選擇定時器模式:TIM脈沖寬度調制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比較輸出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //輸出極性:TIM輸出比較極性低
TIM_OC4Init(TIM3, &TIM_OCInitStructure); //根據T指定的引數初始化外設TIM1 4OC1
TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM14在CCR1上的預裝載暫存器
TIM_ARRPreloadConfig(TIM3,ENABLE);//ARPE使能
TIM_Cmd(TIM3, ENABLE); //使能TIM3
}
配置完TIM3輸出4路PWM后,就可以呼叫TIM_SetCompare1(TIM3,compare1)進行輸出1占比控制了,compare1越大,速度越慢,可以分別設定4個馬達的速度組合使小車有不同的行駛模式,大家可以盡情組合,還挺有意思的,我這里貼出我其中的幾種行駛模式:
//核心板與L298N連線: 后驅 ENA(右邊) - PC7 ENB(左邊) - PC6 IN1234 -PD0134
// 前驅 ENA (右邊) - PC8 ENB(左邊) — PC9 IN1234 - PE2356
void car_go_medium(void) // 中速 直行
{
GPIO_SetBits(GPIOD,GPIO_Pin_0 | GPIO_Pin_4); //輸出邏輯為1001
GPIO_ResetBits(GPIOD,GPIO_Pin_1 | GPIO_Pin_3);
GPIO_SetBits(GPIOE,GPIO_Pin_2 | GPIO_Pin_5); //輸出邏輯為1001
GPIO_ResetBits(GPIOE,GPIO_Pin_3 | GPIO_Pin_6);
//compare1 (PC6) 對應后驅右邊馬達速度
//compare2 (PC7) 對應后驅左邊馬達速度
//compare3 (PC8) 對應前驅右邊馬達速度
//compare4 (PC9) 對應前驅左邊馬達速度
TIM_SetCompare1(TIM3,250); //值越大轉速越慢
TIM_SetCompare2(TIM3,250); //值越大轉速越慢
TIM_SetCompare3(TIM3,250); //值越大轉速越慢
TIM_SetCompare4(TIM3,250); //值越大轉速越慢
}
void car_go_high(void) // 高速 直行
{
GPIO_SetBits(GPIOD,GPIO_Pin_0 | GPIO_Pin_4);
GPIO_ResetBits(GPIOD,GPIO_Pin_1 | GPIO_Pin_3);
GPIO_SetBits(GPIOE,GPIO_Pin_2 | GPIO_Pin_5);
GPIO_ResetBits(GPIOE,GPIO_Pin_3 | GPIO_Pin_6);
TIM_SetCompare1(TIM3,100); //值越大轉速越慢
TIM_SetCompare2(TIM3,100); //值越大轉速越慢
TIM_SetCompare3(TIM3,100); //值越大轉速越慢
TIM_SetCompare4(TIM3,100); //值越大轉速越慢
}
void car_back(void) //后退
{
GPIO_SetBits(GPIOD,GPIO_Pin_1 | GPIO_Pin_3);
GPIO_ResetBits(GPIOD,GPIO_Pin_0 | GPIO_Pin_4);
GPIO_SetBits(GPIOE,GPIO_Pin_3 | GPIO_Pin_6);
GPIO_ResetBits(GPIOE,GPIO_Pin_2 | GPIO_Pin_5);
TIM_SetCompare1(TIM3,300); //值越大轉速越慢
TIM_SetCompare2(TIM3,300); //值越大轉速越慢
TIM_SetCompare3(TIM3,300); //值越大轉速越慢
TIM_SetCompare4(TIM3,300); //值越大轉速越慢
}
void car_left(void) //左轉
{
GPIO_SetBits(GPIOD,GPIO_Pin_0 | GPIO_Pin_4);
GPIO_ResetBits(GPIOD,GPIO_Pin_1 | GPIO_Pin_3);
GPIO_SetBits(GPIOE,GPIO_Pin_2 | GPIO_Pin_5);
GPIO_ResetBits(GPIOE,GPIO_Pin_3 | GPIO_Pin_6);
TIM_SetCompare1(TIM3,350);
TIM_SetCompare2(TIM3,350);
TIM_SetCompare3(TIM3,100);
TIM_SetCompare4(TIM3,300);
}
至此,可以實作小車的前進,后退,左轉,右轉等基本功能,
使用藍牙串口模塊連接手機與MCU通信,使用串口中斷函式對小車控制
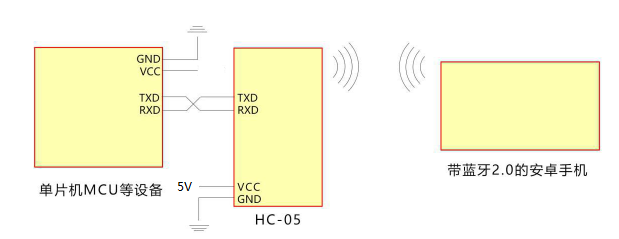
介紹一下藍牙模塊JDY-31藍牙轉串口
理解這一句話就行了,這種藍牙模塊實際上就是一個將藍牙轉成串口的工具,串口怎么用,這個工具就怎么用即可,下面這種圖是https://blog.csdn.net/qq_38410730/article/details/80368485這個博客里面的,我也是看這篇博客搞懂是怎么回事,大家有興趣可以看一下,他寫的很好
藍牙串口連接程式
這里我選擇了串口1進行與藍牙的通信,配置如下:
//初始化IO 串口1
//bound:波特率
void uart_init(u32 bound){
//GPIO埠設定
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA時鐘
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能USART1時鐘
//串口1對應引腳復用映射
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //GPIOA9復用為USART1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //GPIOA10復用為USART1
//USART1埠配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //GPIOA9與GPIOA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//復用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽復用輸出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA9,PA10
//USART1 初始化設定
USART_InitStructure.USART_BaudRate = bound;//波特率設定
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字長為8位資料格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一個停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//無奇偶校驗位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//無硬體資料流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收發模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_Cmd(USART1, ENABLE); //使能串口1
//USART_ClearFlag(USART1, USART_FLAG_TC);
#if EN_USART1_RX
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//開啟相關中斷
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中斷通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//搶占優先級3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子優先級3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根據指定的引數初始化VIC暫存器、
#endif
}
基本就是例程里面的程式,值得指出的是STM32F4的串口配置與F1的配置程式是有一些不同的,大家可以注意一下;接下來就是在串口1中斷函式里面進行對小車的控制:
void USART1_IRQHandler(void) //串口1中斷服務程式
{
u8 Res;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中斷(接收到的資料必須是0x0d 0x0a結尾)
{
USART_ClearITPendingBit(USART1,USART_IT_RXNE);
LED1=!LED1;
Res =USART_ReceiveData(USART1);//(USART1->DR); //讀取接收到的資料
if (Res == 1)
{
LED0 = !LED0;
car_left();
}
if (Res == 2)
{
LED0 = !LED0;
car_go_medium();
}
if (Res == 3)
{
LED0 = !LED0;
car_right();
}
if (Res == 4)
{
LED0 = !LED0;
car_Bigleft();
}
if (Res == 5)
{
LED0 = !LED0;
car_stop();
}
if (Res == 6)
{
LED0 = !LED0;
car_Bigright();
}
if (Res == 7)
{
LED0 = !LED0;
car_back_left();
}
if (Res == 8)
{
LED0 = !LED0;
car_back();
}
if (Res == 9)
{
LED0 = !LED0;
car_back_right();
}
if (Res == 10)
{
LED0 = !LED0;
car_Left_circle();
}
if (Res == 11)
{
LED0 = !LED0;
car_go_high();
}
if (Res == 12)
{
LED0 = !LED0;
car_Right_circle();
}
}
}
#endif
中斷程式就是接收手機通過藍牙發送的資料進行判斷,然后呼叫不同的驅動模式函式控制小車行駛;
使用手機藍牙串口工具與藍牙模塊連接發送資料
藍牙串口連接軟體網上很多,不過很多都帶廣告,我也是找了好久才找到一款比較干凈的;
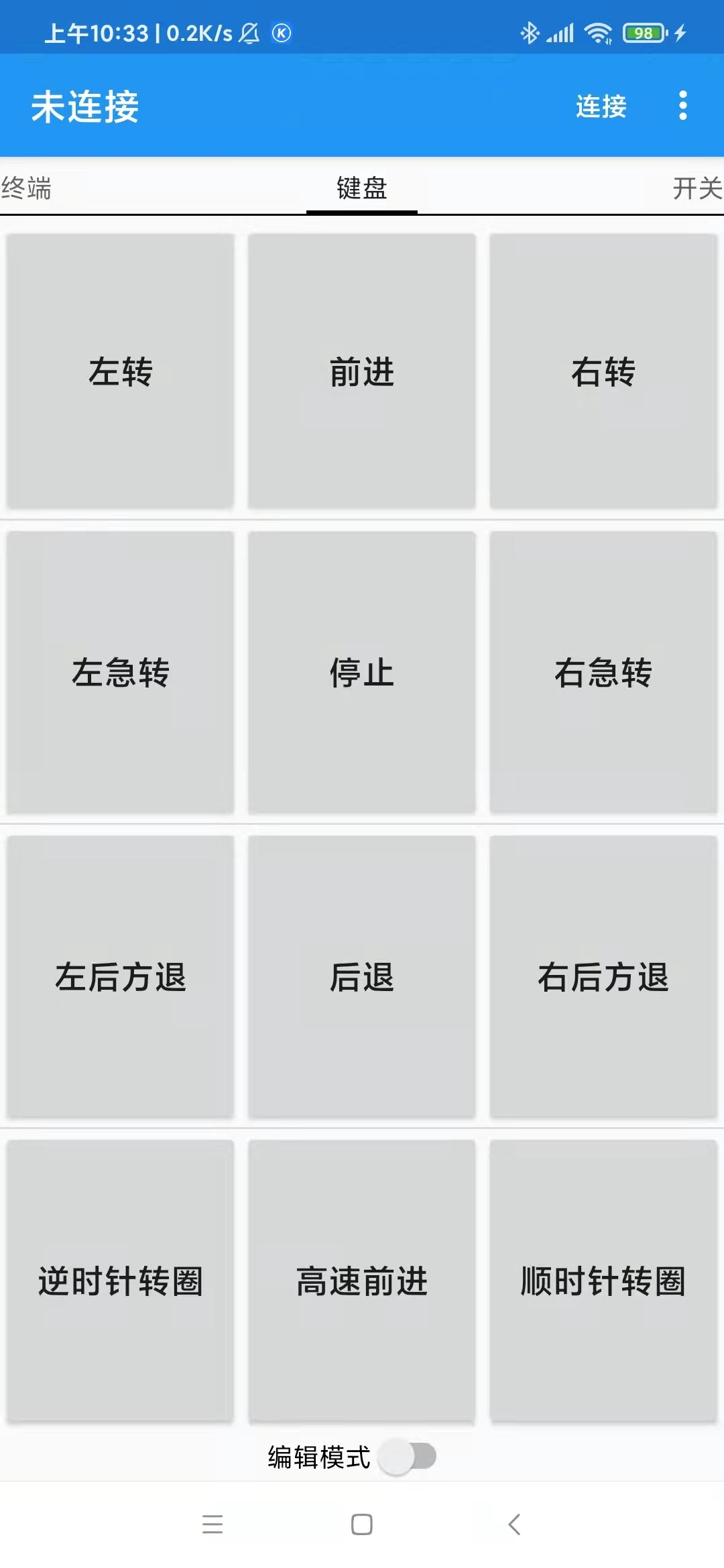
這個界面可以編輯按下按鈕就發送一個字符到MCU,MCU根據不同的字符進行驅動模式的選擇,也是和前面的中斷程式對應,
結束語
目前這個小車只能通過藍牙連接進行遙控,哈哈哈,也就是市面上常見的玩具車~我每次和女朋友說我在做這個車,她都覺得好笑
做這個車的程序中遇到很多問題,由于老師那邊的專案時間也比較緊張,實際上能給我做車的時間并不多,后續還要加上超聲波測距和循跡基本功能,明年有機會的話就去和本科生一起參加比賽,
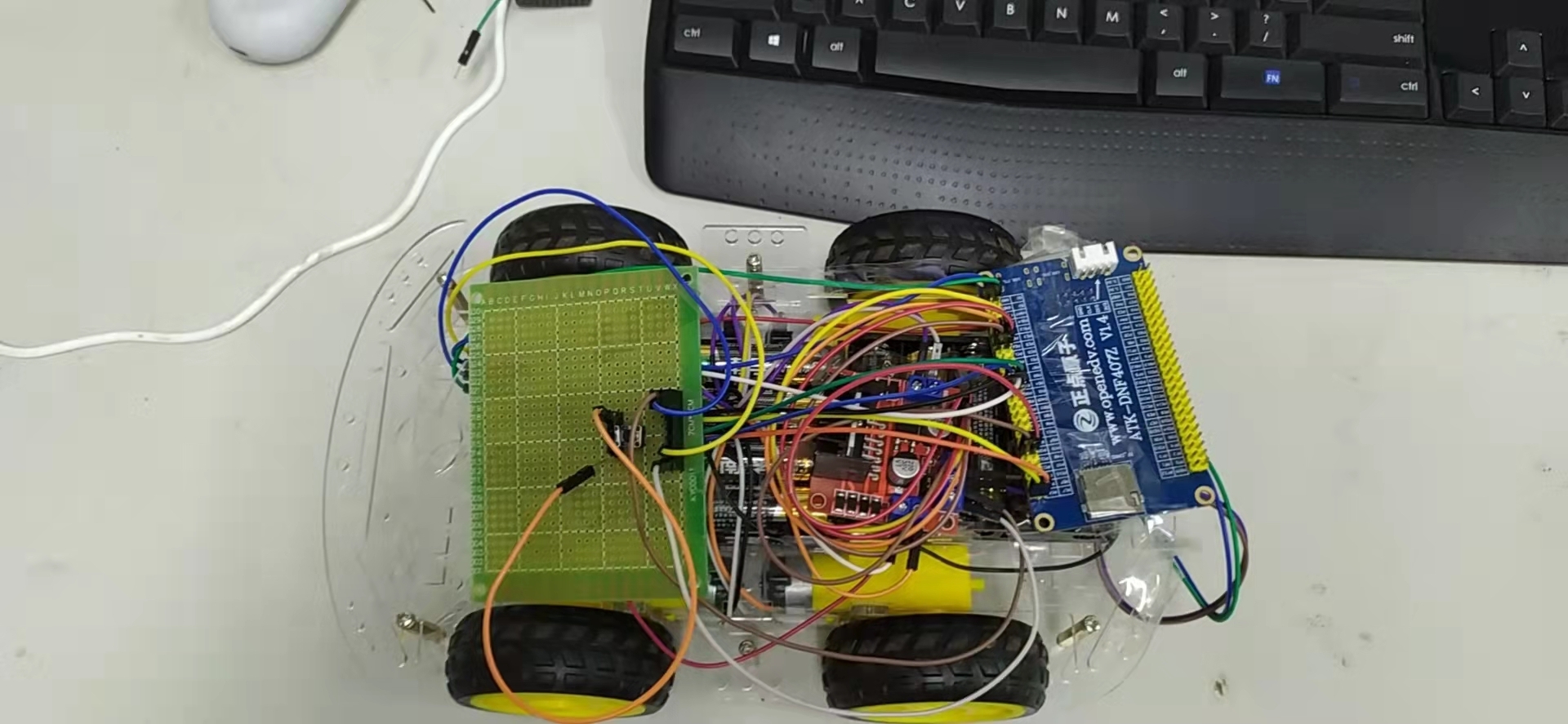
最后放一張實物圖,大家有什么問題歡迎評論區提問討論,一起學習一起進步~
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/384407.html
標籤:其他