您是否知道 OpenCV 具有執行行人檢測的內置方法?
OpenCV 附帶一個預訓練的 HOG + 線性 SVM 模型,可用于在影像和視頻流中執行行人檢測,
今天我們使用Opencv自帶的模型實作對視頻流中的行人檢測,只需打開一個新檔案,將其命名為 detect.py ,然后加入代碼:
# import the necessary packages
from __future__ import print_function
import numpy as np
import argparse
import cv2
import os
匯入需要的包,然后定義專案需要的方法,
def nms(boxes, probs=None, overlapThresh=0.3):
# if there are no boxes, return an empty list
if len(boxes) == 0:
return []
# if the bounding boxes are integers, convert them to floats -- this
# is important since we'll be doing a bunch of divisions
if boxes.dtype.kind == "i":
boxes = boxes.astype("float")
# initialize the list of picked indexes
pick = []
# grab the coordinates of the bounding boxes
x1 = boxes[:, 0]
y1 = boxes[:, 1]
x2 = boxes[:, 2]
y2 = boxes[:, 3]
# compute the area of the bounding boxes and grab the indexes to sort
# (in the case that no probabilities are provided, simply sort on the
# bottom-left y-coordinate)
area = (x2 - x1 + 1) * (y2 - y1 + 1)
idxs = y2
# if probabilities are provided, sort on them instead
if probs is not None:
idxs = probs
# sort the indexes
idxs = np.argsort(idxs)
# keep looping while some indexes still remain in the indexes list
while len(idxs) > 0:
# grab the last index in the indexes list and add the index value
# to the list of picked indexes
last = len(idxs) - 1
i = idxs[last]
pick.append(i)
# find the largest (x, y) coordinates for the start of the bounding
# box and the smallest (x, y) coordinates for the end of the bounding
# box
xx1 = np.maximum(x1[i], x1[idxs[:last]])
yy1 = np.maximum(y1[i], y1[idxs[:last]])
xx2 = np.minimum(x2[i], x2[idxs[:last]])
yy2 = np.minimum(y2[i], y2[idxs[:last]])
# compute the width and height of the bounding box
w = np.maximum(0, xx2 - xx1 + 1)
h = np.maximum(0, yy2 - yy1 + 1)
# compute the ratio of overlap
overlap = (w * h) / area[idxs[:last]]
# delete all indexes from the index list that have overlap greater
# than the provided overlap threshold
idxs = np.delete(idxs, np.concatenate(([last],
np.where(overlap > overlapThresh)[0])))
# return only the bounding boxes that were picked
return boxes[pick].astype("int")
image_types = (".jpg", ".jpeg", ".png", ".bmp", ".tif", ".tiff")
def list_images(basePath, contains=None):
# return the set of files that are valid
return list_files(basePath, validExts=image_types, contains=contains)
def list_files(basePath, validExts=None, contains=None):
# loop over the directory structure
for (rootDir, dirNames, filenames) in os.walk(basePath):
# loop over the filenames in the current directory
for filename in filenames:
# if the contains string is not none and the filename does not contain
# the supplied string, then ignore the file
if contains is not None and filename.find(contains) == -1:
continue
# determine the file extension of the current file
ext = filename[filename.rfind("."):].lower()
# check to see if the file is an image and should be processed
if validExts is None or ext.endswith(validExts):
# construct the path to the image and yield it
imagePath = os.path.join(rootDir, filename)
yield imagePath
def resize(image, width=None, height=None, inter=cv2.INTER_AREA):
dim = None
(h, w) = image.shape[:2]
# 如果高和寬為None則直接回傳
if width is None and height is None:
return image
# 檢查寬是否是None
if width is None:
# 計算高度的比例并并按照比例計算寬度
r = height / float(h)
dim = (int(w * r), height)
# 高為None
else:
# 計算寬度比例,并計算高度
r = width / float(w)
dim = (width, int(h * r))
resized = cv2.resize(image, dim, interpolation=inter)
# return the resized image
return resized
nms函式:非極大值抑制,
list_images:讀取圖片,
resize:等比例改變大小,
# construct the argument parse and parse the arguments
ap = argparse.ArgumentParser()
ap.add_argument("-i", "--images", default='test1', help="path to images directory")
args = vars(ap.parse_args())
# 初始化 HOG 描述符/人物檢測器
hog = cv2.HOGDescriptor()
hog.setSVMDetector(cv2.HOGDescriptor_getDefaultPeopleDetector())
定義輸入圖片的檔案夾路徑,
初始化HOG檢測器,
# loop over the image paths
for imagePath in list_images(args["images"]):
# 加載影像并調整其大小以
# (1)減少檢測時間
# (2)提高檢測精度
image = cv2.imread(imagePath)
image = resize(image, width=min(400, image.shape[1]))
orig = image.copy()
print(image)
# detect people in the image
(rects, weights) = hog.detectMultiScale(image, winStride=(4, 4),
padding=(8, 8), scale=1.05)
# draw the original bounding boxes
print(rects)
for (x, y, w, h) in rects:
cv2.rectangle(orig, (x, y), (x + w, y + h), (0, 0, 255), 2)
# 使用相當大的重疊閾值對邊界框應用非極大值抑制,以嘗試保持仍然是人的重疊框
rects = np.array([[x, y, x + w, y + h] for (x, y, w, h) in rects])
pick = nms(rects, probs=None, overlapThresh=0.65)
# draw the final bounding boxes
for (xA, yA, xB, yB) in pick:
cv2.rectangle(image, (xA, yA), (xB, yB), (0, 255, 0), 2)
# show some information on the number of bounding boxes
filename = imagePath[imagePath.rfind("/") + 1:]
print("[INFO] {}: {} original boxes, {} after suppression".format(
filename, len(rects), len(pick)))
# show the output images
cv2.imshow("Before NMS", orig)
cv2.imshow("After NMS", image)
cv2.waitKey(0)
遍歷 --images 目錄中的影像,
然后,將影像調整為最大寬度為 400 像素,嘗試減少影像尺寸的原因有兩個:
- 減小影像大小可確保需要評估影像金字塔中的滑動視窗更少(即從線性 SVM 中提取 HOG 特征,然后將其傳遞給線性 SVM),從而減少檢測時間(并提高整體檢測吞吐量),
- 調整我們的影像大小也提高了我們行人檢測的整體準確性(即更少的誤報),
通過呼叫 hog 描述符的 detectMultiScale 方法,檢測影像中的行人, detectMultiScale 方法構造了一個比例為1.05 的影像金字塔,滑動視窗步長分別為x 和y 方向的(4, 4) 個像素,
滑動視窗的大小固定為 64 x 128 像素,正如開創性的 Dalal 和 Triggs 論文《用于人體檢測的定向梯度直方圖》所建議的那樣, detectMultiScale 函式回傳 rects 的 2 元組,或影像中每個人的邊界框 (x, y) 坐標和 weights ,SVM 為每次檢測回傳的置信度值,
較大的尺度大小將評估影像金字塔中的較少層,這可以使演算法運行得更快,然而,規模太大(即影像金字塔中的層數較少)會導致行人無法被檢測到,同樣,過小的比例尺會顯著增加需要評估的影像金字塔層的數量,這不僅會造成計算上的浪費,還會顯著增加行人檢測器檢測到的誤報數量,也就是說,在執行行人檢測時,比例是要調整的最重要的引數之一,我將在以后的博客文章中對每個引數進行更徹底的審查以檢測到多尺度,
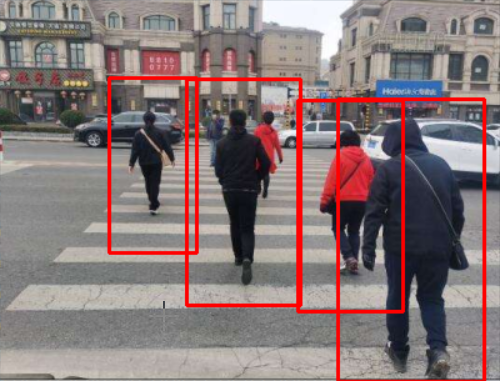
獲取初始邊界框并將它們繪制在影像上,
但是,對于某些影像,您會注意到每個人檢測到多個重疊的邊界框,
在這種情況下,我們有兩個選擇,我們可以檢測一個邊界框是否完全包含在另一個邊界框內,或者我們可以應用非最大值抑制并抑制與重要閾值重疊的邊界框,
應用非極大值抑制后,得到最終的邊界框,然后輸出影像,
運行結果:
nms前:
nms后:
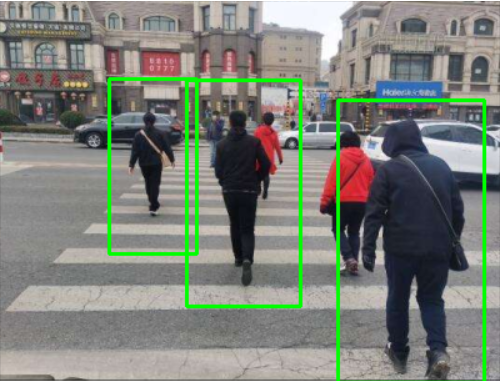
結論:
相比現在的深度學習方法,機器學習的精度低了很多,
完整代碼:
https://download.csdn.net/download/hhhhhhhhhhwwwwwwwwww/67160136
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/389018.html
標籤:其他
上一篇:opencv演算法+人臉檢測