傳感網應用開發知識點總結
- 1+X職業技能等級證書-傳感網應用開發
- 一、資料采集
- 1.模擬量資料采集
- 2.數字量傳感器資料采集
- 3.開關量傳感器資料采集
- 二、STM32微控制器基本外設應用開發
- 1、基礎知識
- 三、RS-485總線通訊應用
- 四、CAN總線通訊應用
- 1.CAN基礎知識
- 2.CAN通信幀型別
- 五、基于BasicRf的無線通信應用
- 1.BasicRf基礎知識
- 六、Wi-Fi資料通信
- 七、NB-IOT聯網通信
- 八、LoRa通信應用開發
- 三級目錄
1+X職業技能等級證書-傳感網應用開發
一、資料采集
1.模擬量資料采集
- 模擬量是指在時間上和數值上都是連續的物理量;
- 光電傳感器的理論基礎為光電效應,光電效應可以分為外光電效應、內光電效應和光生伏特效應,
- 外光電效應:在光線的作用下,物體內的電子逸出物體表面向外發射;
- 內光電效應:在光線的作用下,電子吸收光子能量從鍵合狀態過渡到自由狀態,又稱光導效應,例如光敏電阻器件;
- 光生伏特效應:在光線的作用下,能夠產生一定方向的電動勢,例如光敏二極管型器件;
- 光敏電阻的主要引數有:
- 光電流、亮電阻:在一定外加電壓和光照下,流過的電流為光電流,外加電壓和光電流之比為亮電阻,常用“100lx”表示,
- 暗電流、暗電阻:在一定外加電壓和沒有光照下,流過的電流為暗電流,外加電壓和光電流之比為暗電阻,常用“0lx”表示,
- 靈敏度
- 光譜特性
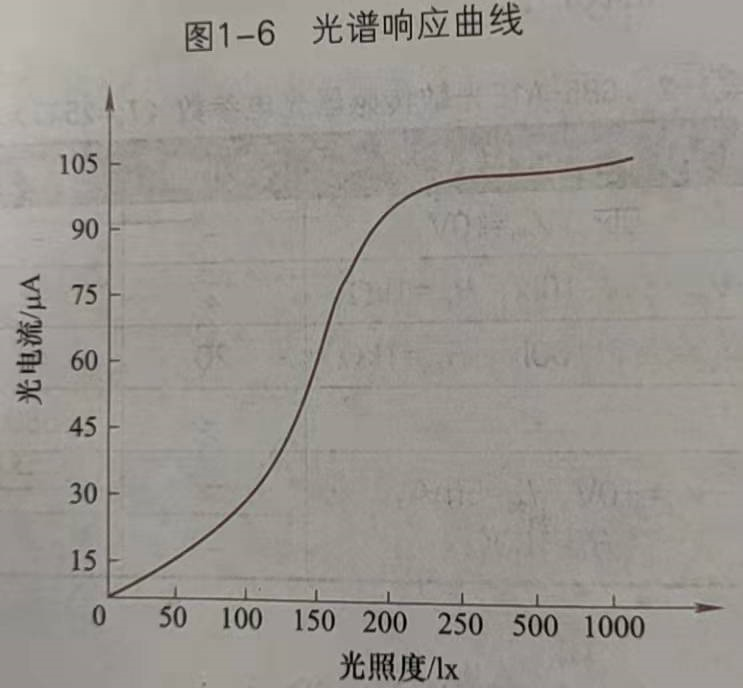
- 光照特性
- GB5-A1E光敏傳感器,光照特性曲線顯示,當光線逐漸增強是,光電流值先迅速變大,再緩慢變大,
- 氣敏傳感器分為電阻型氣敏器件和非電阻型氣敏器件:
作用原理:主要是半導體與氣體相互作用是產生表面吸附或反應,引起載流子運動為特征的電導率或伏安特性或表面電位的變化,
- 電阻型氣敏器件按結構可以分為燒結型、薄膜型、厚膜型三種;
- 燒結型氣敏器件通常使用直熱式和旁熱式兩類工藝;
- 典型氣敏器件TGS813可燃氣體傳感器(輕微發燙)、MQ-135和TGS2602空氣質量傳感器,
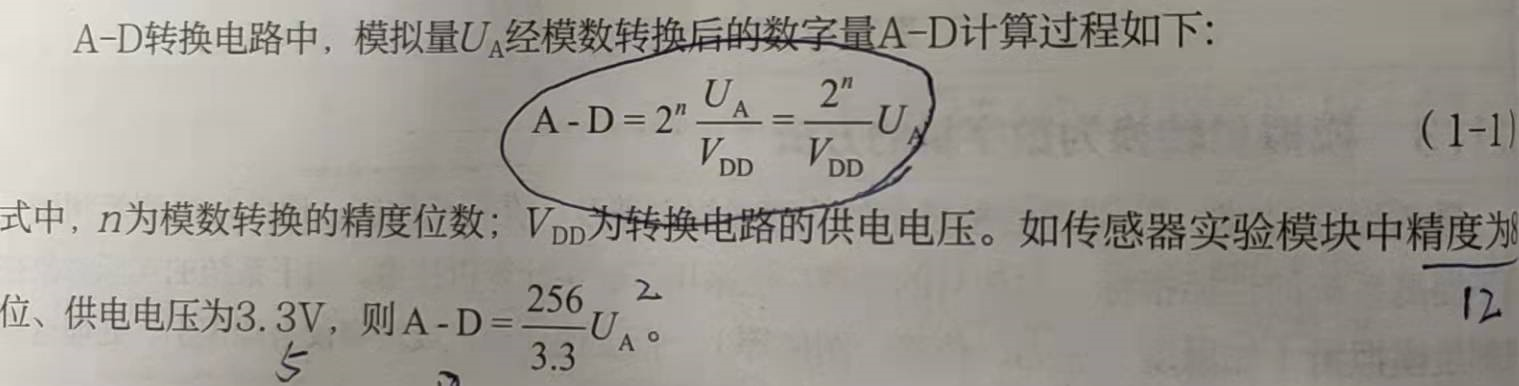
- 將模擬量轉換為數字量的器件,稱為模-數轉換器(ADC),將數字信號轉換為模擬信號的電路稱為數-模轉換器(DAC),
模數轉換程序中包括采樣、保持、量化和編碼四個程序
A-D轉換器的主要性能指標:
- 解析度:一般來說A-D位數越多,其解析度越高;
- 量化誤差
- 轉換時間:完成轉換需要的時間,有高速、中速、低速;
- 絕對精度
- 相對精度
轉換公式:
2.數字量傳感器資料采集
- 數字量是在時間和數值上都是不連續的(離散),其數值有一串0和1組成的二進制代碼串,
- 溫度傳感器可以按體積熱膨脹、電阻變化、溫差電現象、磁導率變化、壓電效應、超聲波傳播速度、晶體管特性變化、晶閘管動作特性變化、熱和光輻射9個作業原理分類,
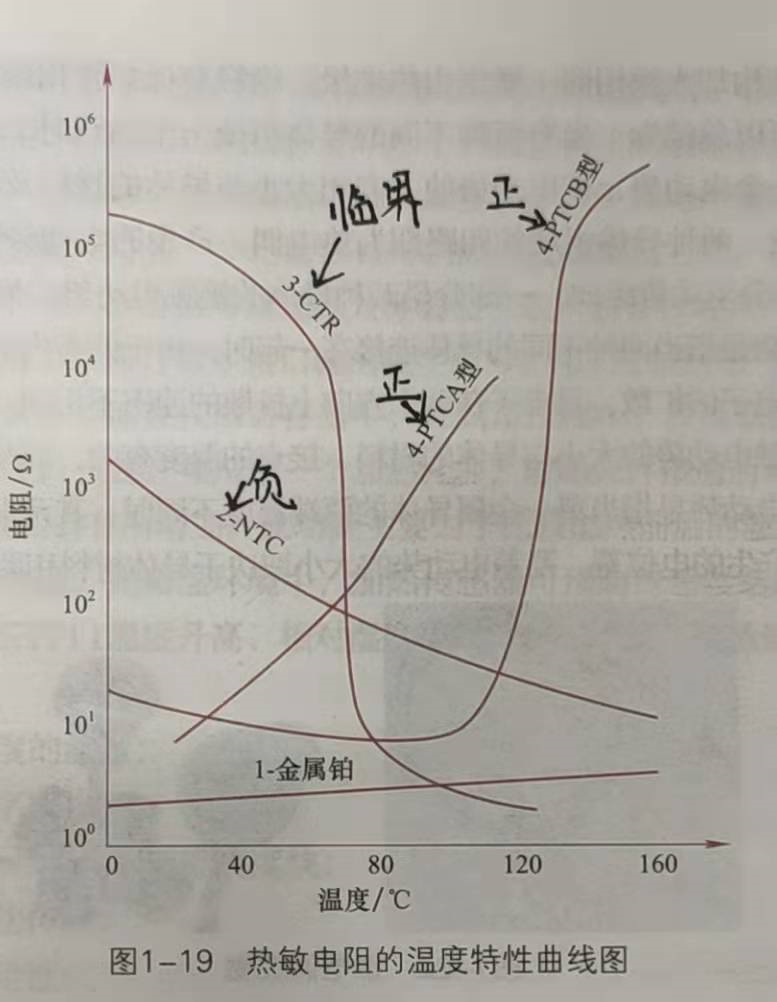
- 熱敏電阻按電阻溫度特性分為負溫度系數熱敏電阻、正溫度系數熱敏電阻和臨界溫度熱敏電阻三大類,
- 負溫度系數熱敏電阻(NTC):電阻值隨著溫度的升高呈線性減小;
- 正溫度系數熱敏電阻(PTC):超出一定溫度時,電阻值隨著溫度的升高呈階躍性的增高;
- 臨界溫度熱敏電阻(CTR):電阻值隨溫度的增加急劇減小,具有很大的負溫度系數;
- 熱電偶可以直接測量溫度,并把溫度信號轉換為熱電動勢信號,通過電氣儀表轉換成被測介質的溫度,
熱電偶原理:當有兩個不同的導體組一個回路時,只要兩節點處的溫度不同,回路中就產生一個熱電動勢,該電動勢的大小和方向與導體的材料及兩接點的溫度有關,并稱為熱電效應,
- 常用補償導線法、冷端溫度校正法、冷端恒溫法、自動補償法這四種方法對冷端進行溫度補償;
- SHT11溫濕度傳感器通過二線數字串行介面(2-wire)來傳輸資料,與I2C協議不兼容,
3.開關量傳感器資料采集
- 開關量傳感器資料可以對應于模擬量傳感資料的“有”和“無”,也可以對應于數字量傳感資料的“1”和“0”兩種狀態,
- 紅外信號資料采集的有紅外光電傳感器、人體感應型紅外傳感器;
- 人體感應型紅外傳感器可以探測人體紅外熱輻射,主要由透鏡、紅外熱輻射感應器、感光電路組成(不包括控制電路)
- Flame-1000-D火焰傳感器能夠探測波長為700~1100nm的短波近紅外線,
- 數字輸出:當檢測到火焰輸出高電平,沒有檢測到火焰時輸出 低電平;
- 模擬輸出:輸出端電壓隨著火焰強度變化而改變;
- 常用的聲傳感器按原理分電容式、壓電式和電動式三種型別,
- MP9767型號是聲音傳感器直接輸出開關量信號,
- 聲音信號采集器件的性能通常還與其尺寸有關,尺寸大的一般不具有較寬頻率范圍,
二、STM32微控制器基本外設應用開發
1、基礎知識
- STM32微控制器基于ARM Cortex-M0,M0+,M3,M4和M7內核,這些內核是專為高性能、低成本和低功耗的嵌入式應用開發的,
- STM32微控制器的命名規則:
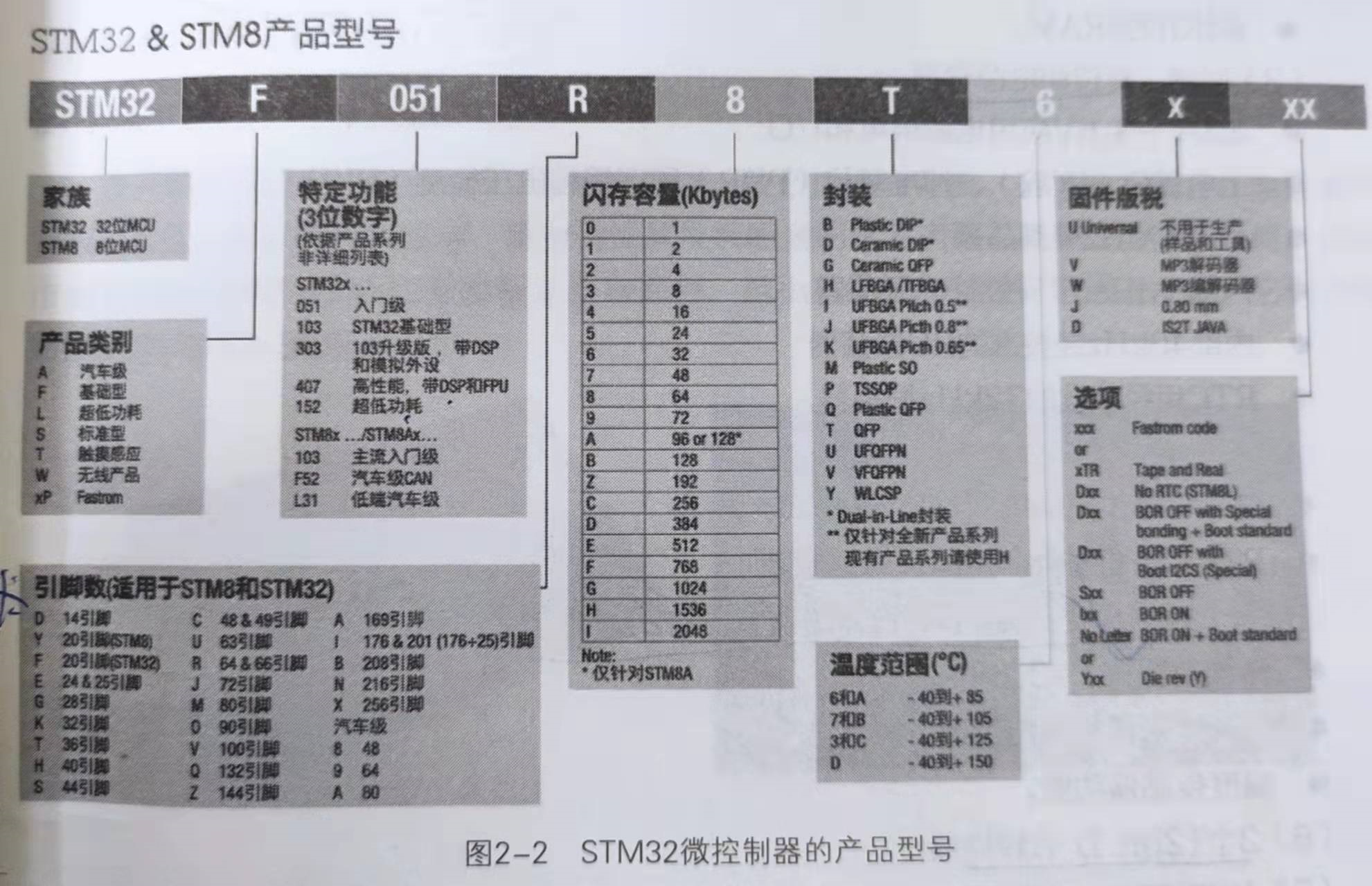
- STM32F103VET6 微控制的主要特性:
- 32位ARM Cortex-M3內核CPU,采用v7架構;
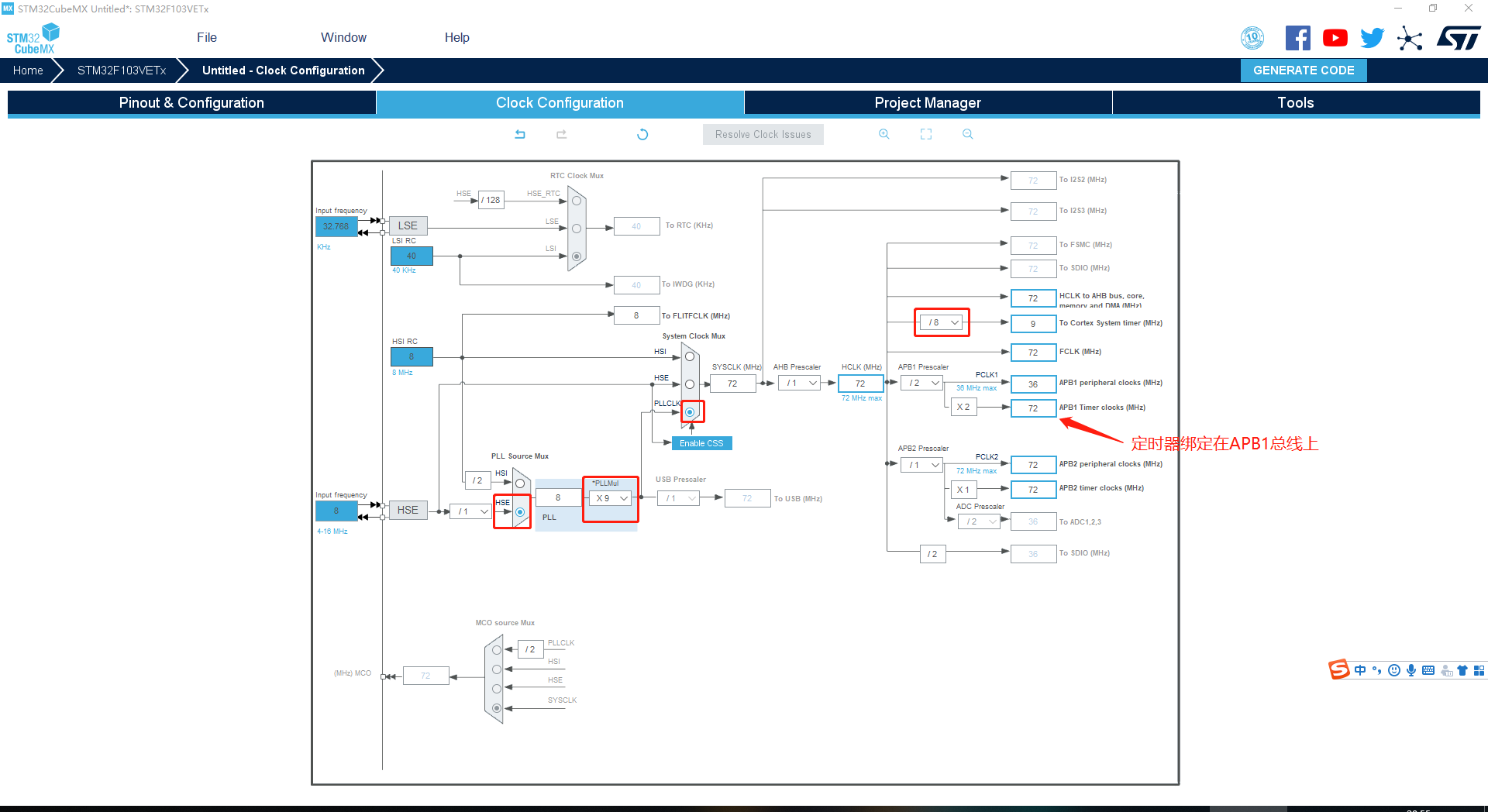
- 最大作業頻率為72MHz,其APB2總線的時鐘頻率為72MHz,APB1總線的頻率為32MHz;
- 具有3個12位的A-D轉換器;
- 支持10個系統例外中斷和60個可屏蔽中斷,具有16級可編程中斷優先級;
- 外部中斷、事件控制器(EXTI)支持19個中斷/事件請求;
- 處理中斷的設備為NVIC,中斷優先級分為搶占優先級和子優先級,中斷優先級數值越大,則優先級越高;
- 具有11個定時器,其中TIM1、TIM8為高級定時器具備輸入捕獲、輸出計較通道功能同時具有互補輸出功能,TIM6不具備輸入捕獲、輸出計較通道功能;
- STM32有基于暫存器、標準外設庫、STM32Cube的HAL庫三種開發模式,
- GPIO被分成5組A-E,每組有16個引腳,每個引腳可以對應一個EXTI中斷,但必須設定為輸入模式才能使用,
- GPIO_Mode_Out_PP 推挽輸出(帶上拉或者下拉): IO 輸出 0-接 GND, IO 輸出 1 -接 VCC,
- GPIO_Mode_AF_PP 推挽復用輸出(帶上拉或者下拉):
- GPIO_Mode_Out_OD 開漏輸出(帶上拉或者下拉):要得到高電平狀態需要上拉電阻才行,可以作為電流型驅動
- GPIO_Mode_AF_OD 開漏復用輸出(帶上拉或者下拉):復用功能,不只是單純的作為輸入輸出,可以作為其他功能的引腳:串口、I2C、SPI,要得到高電平狀態需要上拉電阻才行
- GPIO_Mode_IPU 上拉輸入: 將IO口作為通用輸入介面,只能輸入0或者1,強制下拉,一般是為了輸入強高電平
- GPIO_Mode_IN_FLOATING 浮空輸入 :復位上電的時候,引腳不確定電平的高低
- GPIO_Mode_AIN 模擬輸入:將IO口作為模擬輸入介面,輸入的可能是變化的值,接收外部的模擬信號輸入
- GPIO四種最大輸出速度:2MHZ、25MHZ、50MHZ、100MHZ
- 定時器的計數器主要由TIMx_CNT計數暫存器和TIMx_PSC預分頻器暫存器組成:
-
STM32Cube配置時鐘樹如下:
-
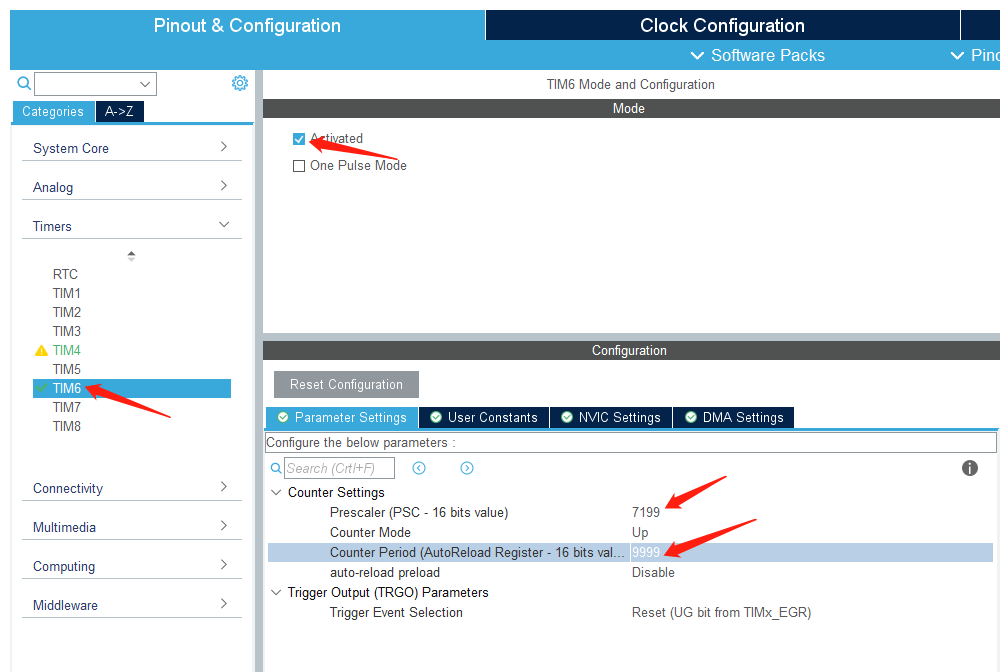
配置定時器定時為1s的計算公式:
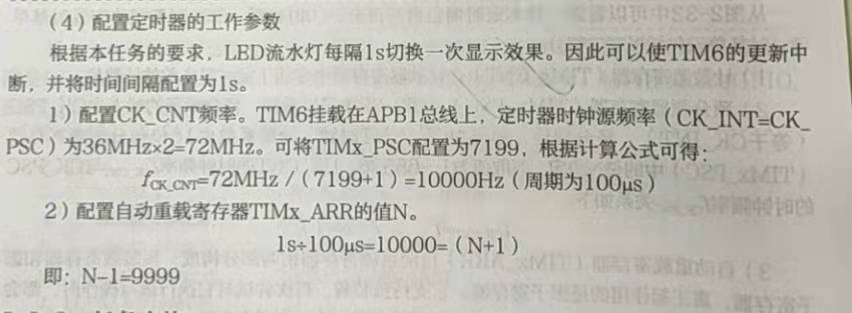
1s = 1 * 10^6 us = 72*10^6 / (PSC+1) * (N+1) ,設定PSC為7199算出來的時間為100us,所以N設定為9999.
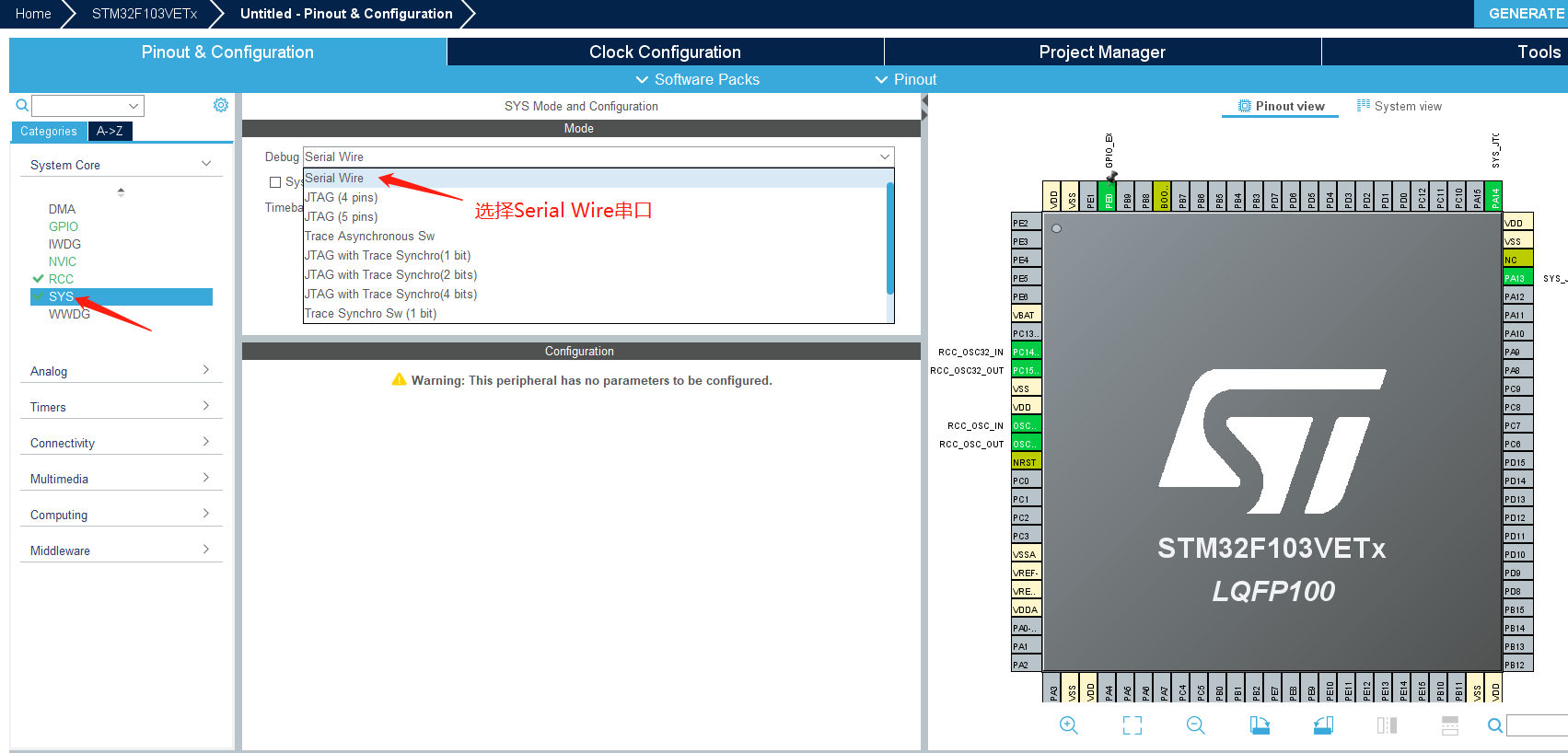
- STM32Cube配置流程:
-
M3模塊選擇STM32VETx芯片,LoRa選擇STM32l151c8Tx芯片
-
配置時鐘
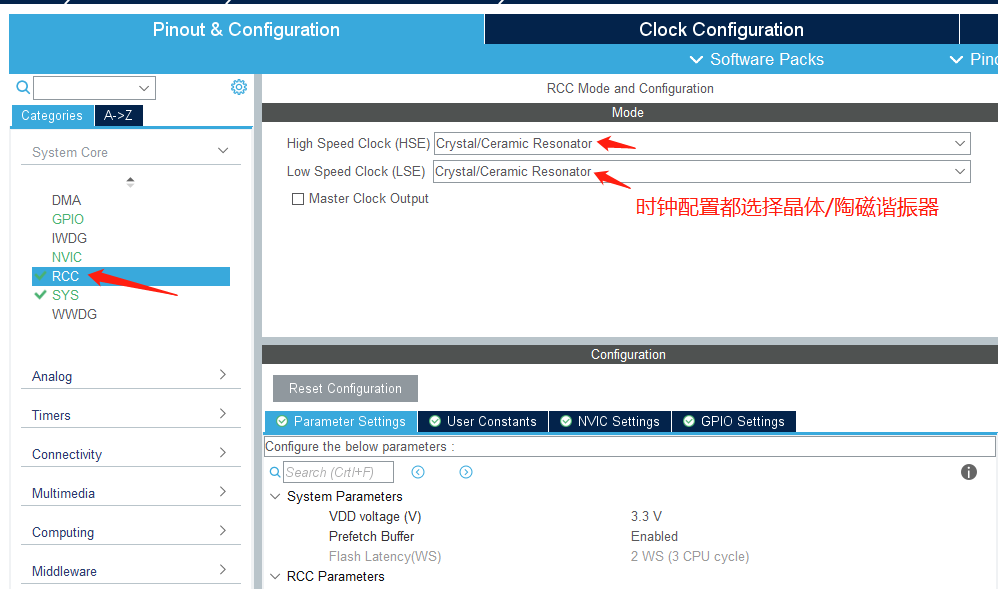
-
開始中斷,配置搶占優先級和子優先級:
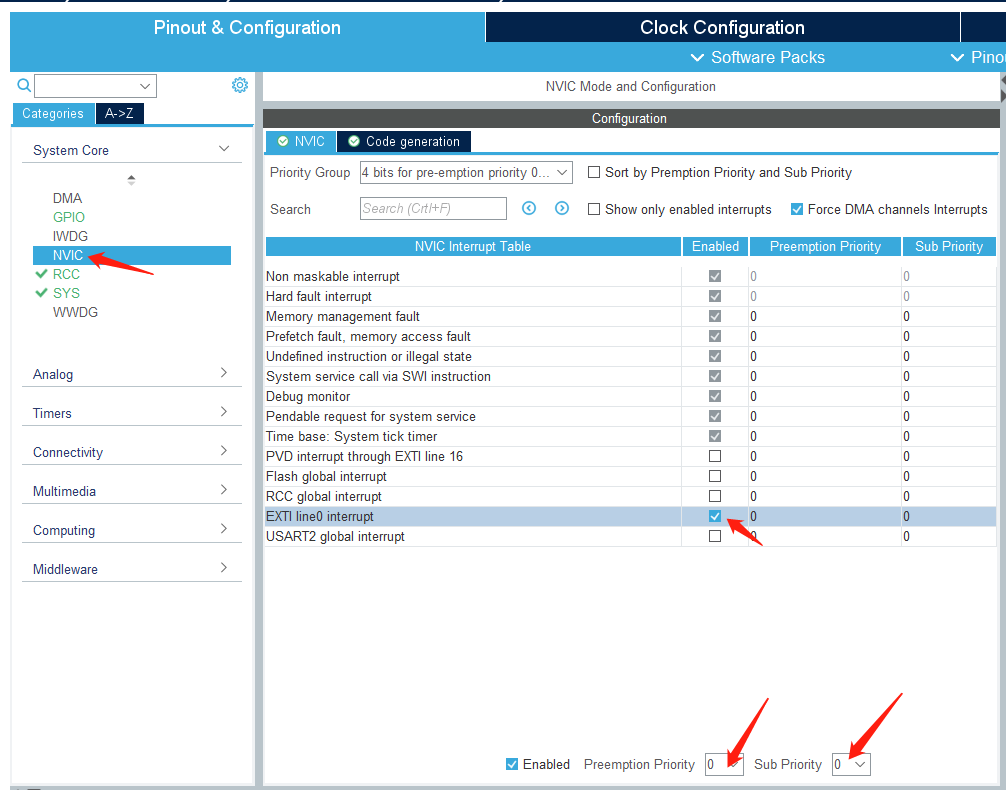
-
如果需要配置串口USART2為異步通信,波特率為115200如下圖
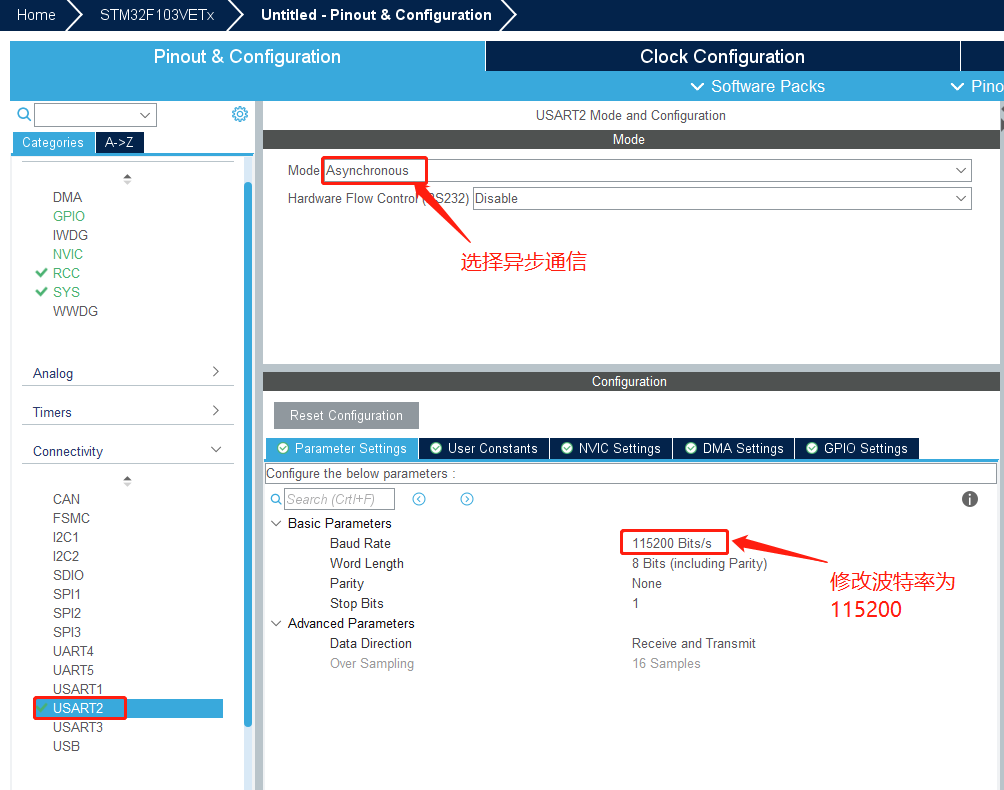
-
配置TIM6定時為1s:
注意:1、使用STM32CubeMX時,軟體提示更新不要更新資源包,因為下載的資源包服務器在外國,下載很慢并可能軟體出現宕機;2、創建工程時,不要出現中文路徑和命名,易出現玄學的問題!
三、RS-485總線通訊應用
四、CAN總線通訊應用
1.CAN基礎知識
- CAN(控制局域網)由德國Bosch公司于1983年開發出來的,
主要特性:資料傳輸距離遠(遠達10km),資料傳輸速率達1Mbit/s具備資料自動重發功能和錯誤檢測和處理功能, - 現有ISO 11519標準的低速通信應用場景(125kbit/s以下),ISO 11898標準的高速通信應用場景(125kbit/s ~1Mbit/s),均屬于應用層協議,
- 資料鏈路層,兩個協議定義的內容一樣;
- 物理層,兩個協議定義的內容不同;
- ISO 11519和ISO 11898均使用差分信號進行傳輸資料;
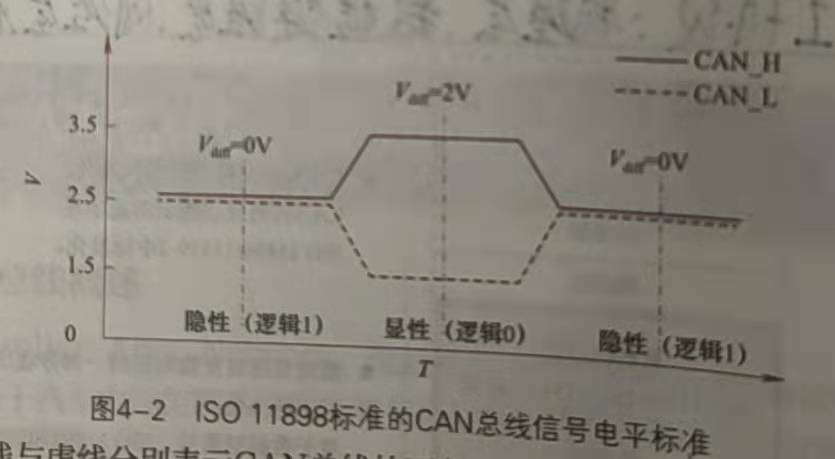
- ISO 11898 高速標準應用于汽車與傳動系統,它是倍訓網路,最大長度為40m,要求兩端有一個120Ω的電阻;ISO 11519低速標準應用于汽車車身系統,它的兩根總線是獨立的,不形成倍訓,要求每根線各串聯一個2.2kΩ的電阻
- 靜態時兩條線差分電壓為0v時,表示邏輯1(隱性電平),差分電壓為2v時,表示邏輯0(顯性電平)
- CAN常用雙絞線、同軸電纜和光纖作為傳輸介質,
- 在總線仲裁時,“顯性”狀態可以支配“隱性”狀態,說明顯性具有優先權,
- 光纖CAN網路可拓撲的網路結構有總線型、環形、星型,
2.CAN通信幀型別
- 資料幀
- 遙控幀
- 錯誤幀
- 過載幀
- 幀間隔
五、基于BasicRf的無線通信應用
1.BasicRf基礎知識
- 基于CC253x芯片的BasicRf軟體包,包括硬體層、硬體抽象層、基本無線傳輸層和應用層,不包括資料互動層,ZigBee技術體系不包括傳輸層,
- 兩個通信模塊的“網路ID”和“通信信道”要一致,否則無法通信,
- 自己創建CC250的IAR工程時,需要三步走才能成功編譯,右擊專案option配置General Options、Linker、Debugger,如需要移植驅動配置工程路徑:
- P R O J D I R PROJ_DIR PROJD?IR\ 代表當前工程檔案說真的workspace;
- …\ 表示對應目錄的上一層;
- 創建模塊更容易工程的管理;
- CC2530總共有21個I/O引腳,具有P0、P1、P2這3個8位引腳,P2僅有5位可以使用:
- 初始化引腳的功能是需要設定PxSEL功能暫存器(0代表GPIO,1代表外設I/O)、PxDIR方向暫存器(0:輸入,1:輸出)默認所有位為0;
- PxINP暫存器設定引腳的輸入模式(0為上拉/下拉(再通過P2INP暫存器0為上拉,1為下拉),1位三態);
- 有5個定時器,作業模式有自由運行模式、模模式、正計數/倒計數三種作業模式,與定時器有關的暫存器有TxCTL、TIMIF…
- 12位解析度的A-D轉換器,ADC相關的暫存器有ADCL、ADCH、ADCCON1、ADCCON2、ADCCON3、APCFG、ATEST;
- 兩個串行通信介面,能夠應用于異步和同步模式,相關暫存器有UxCSR(控制和狀態暫存器)、UxUCR(UART控制暫存器)、UxGCR(通用暫存器)、UxDBUF(緩沖暫存器)、UxBAUD(波特率控制暫存器),x為編號
設定波特率為UxBAUD暫存器,UxGCR暫存器
例如設定USART0波特率為115200 ,U0BAUD = 216;U0GCR = 11;
參考下表:
- CC2530只有P0_0、P0_1有20mA驅動能力,其它引腳都是4mA的驅動能力,
- 中斷向量是中斷處理函式的入口地址,進入后要手動清除中斷標志位,
- CC2530單片機串口引腳輸出信號為TTL信號,
六、Wi-Fi資料通信
七、NB-IOT聯網通信
八、LoRa通信應用開發
三級目錄
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/392254.html
標籤:其他
下一篇:HAL庫控制PS2手柄