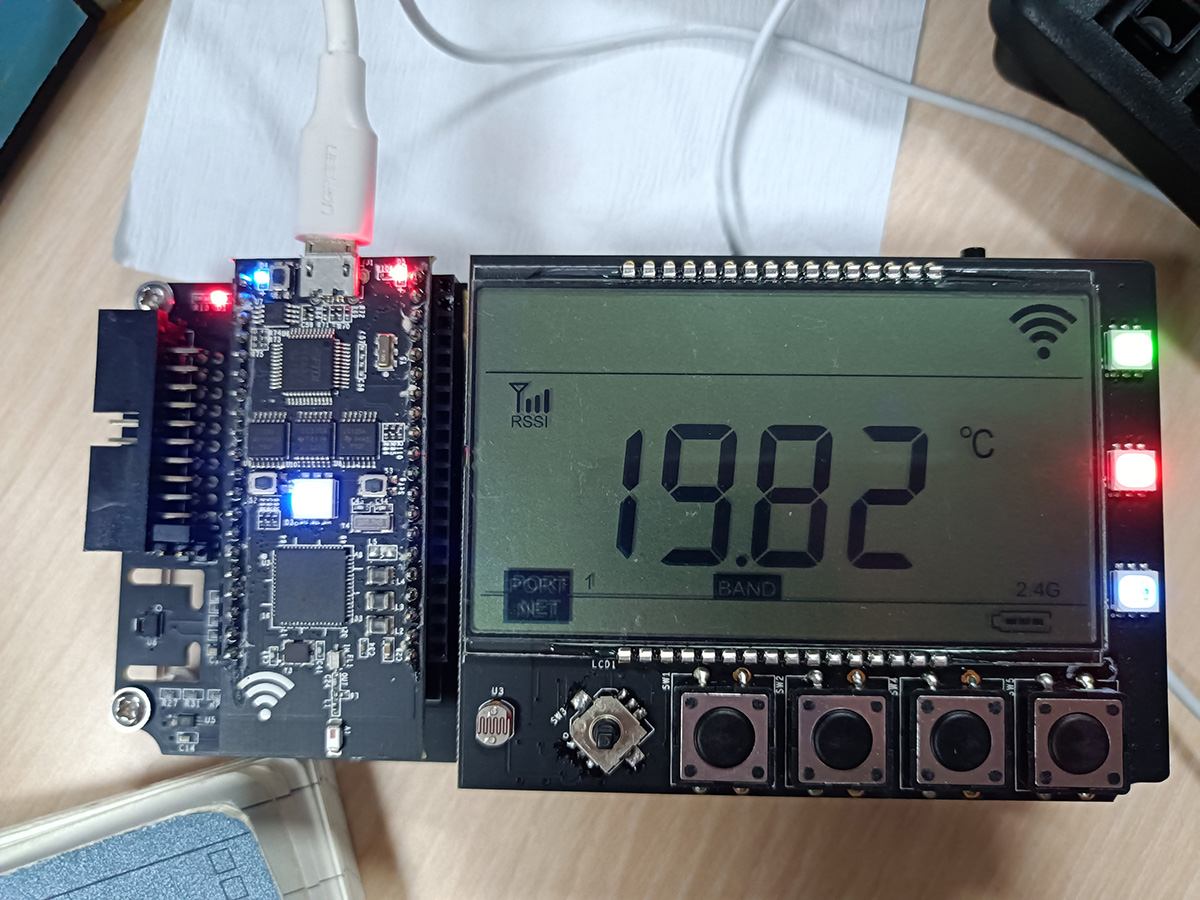
四年前圣誕節,我抽獎抽中一塊CC3200的開發板,并且寫了一篇博客,然后就擱置了…主要原因是,雖然這是一塊外設齊全的板子,通過底板擴展配了溫濕度計、氣壓計、光強傳感器、段式液晶甚至五向開關,但是卻只給了核心板的例程,于是外設板就一直無法上手,
最近意外的有了一點時間,仔細看了看底板的原理圖,發現擴展板所有的外設,都是用I2C總線控制的,I2C也是我的“老朋友”了,之前我用STM8的時候,就調過硬體I2C,并且被其復雜的中斷機制困擾不已,事實上,很多時候,使用GPIO模擬I2C,可能都比用單片機的硬體I2C外設方便(GPIO模擬I2C也已經夠麻煩了),
TI-RTOS對這種硬體外設問題的解決方案是,提供一套封裝了底層驅動,API與芯片無關的驅動庫(Driverlib)供用戶使用,這樣我們就可以只根據使用的需求來寫代碼,無需關注底層實作,這對于I2C這樣復雜的通信協議來說真的是很方便的(雖然可能要付出代碼效率的代價)比起四年前,我現在也比較熟悉RTOS了,因此用TI-RTOS的Driverlib開拓這塊評估板的額外功能也就成了順理成章的事情,我這次先操作兩個簡單的外設:PCA9539控制LED,以及氣壓溫度計BMP180,
一、TI-RTOS Driverlib傳輸模式簡述
TI-RTOS Driverlib的I2C驅動提供了幾乎完全面向資料傳輸的封裝:傳輸模式分為I2C_MODE_BLOCKING和I2C_MODE_CALLBACK兩種,分別指在傳輸時阻塞呼叫傳輸API的執行緒直到傳輸完成,或者是在傳輸后運行一個回呼函式,對我們這個簡單的應用來說,BLOCKING模式已經足夠了,
I2C的傳輸又被分為寫模式(Write),讀模式(Read)和寫讀模式(Write/Read),不管哪種模式,I2C外設在開始傳輸后,都要由單片機作為Master傳輸I2C硬體地址選擇相應的芯片,寫模式在傳輸完地址后接著把寫快取writeBuf中的資料傳輸出去,讀模式在傳輸完地址后就開始從芯片讀數到讀快取readBuf;寫讀模式則是為那些片內還有地址的芯片(比如我們要用的BMP180)準備的,寫讀模式在傳輸完I2C地址后,會先從writeBuf讀數輸出給芯片,然后才從芯片讀數回readBuf,使用這三種模式無需專門設定,只要給Driverlib的I2C傳輸結構體(I2C_Transaction)中的writeCount和readCount賦值,writeCount為0是讀模式,readCount為0是寫模式,都不為0就是寫讀模式,
在編程時,我們可以在初始化階段完成對I2C外設的配置:
I2C_Params i2cParams;
I2C_Params_init(&i2cParams);
i2cParams.transferMode = I2C_MODE_BLOCKING;
i2cParams.bitRate = I2C_100kHz;
i2cParams.transferCallbackFxn = NULL;
i2c = I2C_open(Board_I2C0, &i2cParams);
if (i2c == NULL) {
System_abort("Error opening the I2C");
}
二、PCA9539的控制
PCA9539是一個用I2C擴展2×8路IO的介面芯片,每路都可以用作輸入或者輸出,單片機從I2C讀取即可,PCA9539還提供一個中斷介面,這樣類似GPIO的外部中斷功能也能實作,
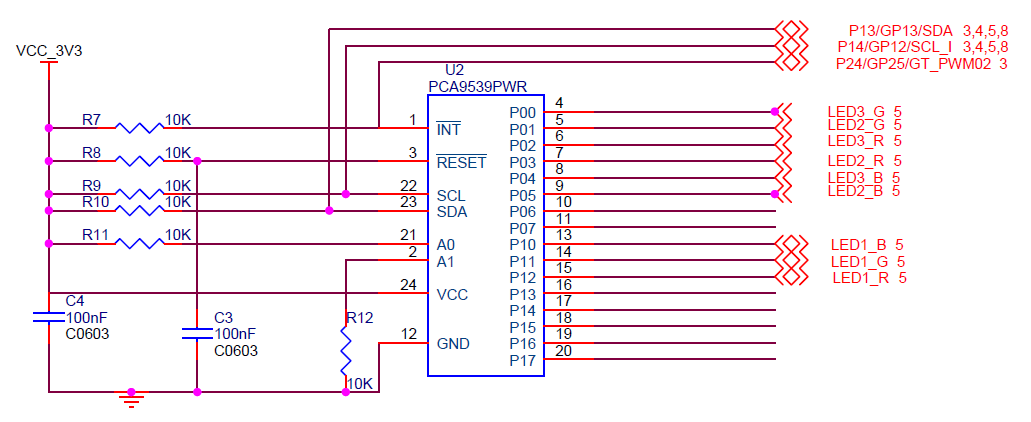 我們要實作的功能其實相對簡單,操控LED只需要輸出,所以我們也只要在I2C上寫資料資料就好了,該芯片的7位地址是0x75,第一個輸出地址是0x02,這些LED都是共陽極接法,我想點亮LED3_G、LED2_R和LED1_B,要寫入該芯片的資料就是以下i2c_led_data的內容:
我們要實作的功能其實相對簡單,操控LED只需要輸出,所以我們也只要在I2C上寫資料資料就好了,該芯片的7位地址是0x75,第一個輸出地址是0x02,這些LED都是共陽極接法,我想點亮LED3_G、LED2_R和LED1_B,要寫入該芯片的資料就是以下i2c_led_data的內容:
const uint8_t i2c_led_addr = 0x75;
uint8_t i2c_led_data[] = {0x02,~(0x01+0x08),~(0x01)};
Void I2C_led_test(void)
{
I2C_Transaction i2cTransaction;
bool transferFlag;
i2cTransaction.slaveAddress = i2c_led_addr;
i2cTransaction.writeBuf = i2c_led_data;
i2cTransaction.writeCount = 3;
i2cTransaction.readBuf = NULL;
i2cTransaction.readCount = 0;
i2cTransaction.arg = NULL;
i2cTransaction.nextPtr = NULL;
transferFlag = I2C_transfer(i2c, &i2cTransaction);
if (transferFlag == NULL){
System_abort("Error in I2C Transaction");
}
}
需要注意的是,I2C_transfer函式必須在task中運行,這段代碼我只想運行一次,因此把這整個函式都放在了一個執行緒的死回圈之前執行,
三、從BMP180讀取溫度資料
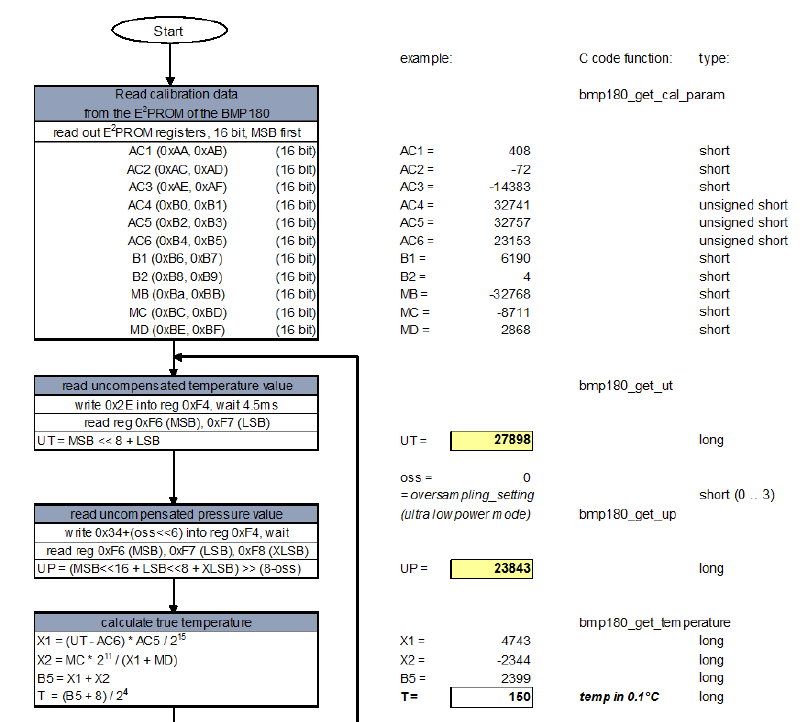
BMP180同時有氣壓和溫度的傳感器,因為我這次只是驗證,所以只讀取溫度,與我之前更常用的LM75不同,BMP180并不是直接給出溫度值,它的溫度或者氣壓都要從一堆變數常量中計算出來(AC5,AC6,MC,MD,UT),這些在BMP180的手冊里都有詳細說明,我們先要讀取常量,然后寫入啟動溫度傳感的指令,等待傳感完成,再進行計算:
 我將溫度傳感的資料整理成一個字串,通過串口上傳驗證I2C傳輸結果,對BMP180的操作寫成一個task,代碼如下:
我將溫度傳感的資料整理成一個字串,通過串口上傳驗證I2C傳輸結果,對BMP180的操作寫成一個task,代碼如下:
uint8_t i2c_bmp180_addr = 0x77;
uint8_t bmp180_start_cmd[] = {0xf4,0x2e};
uint8_t bmp180_read_cmd[] = {0x00};
uint8_t bmp180_read_buf[] = {0x00,0x00};
uint8_t bmp180_e2prom_buf[] = {0x00,0x00};
#define AC5_ADDR 0xb2
#define AC6_ADDR 0xb4
#define MC_ADDR 0xbc
#define MD_ADDR 0xbe
#define TMP_ADDR 0xf6
Void bmp180Fxn(UArg arg0, UArg arg1)
{
I2C_Transaction i2cTransaction;
bool transferFlag;
volatile uint16_t AC5,AC6,MC_pre,MD_pre,UT;
volatile int16_t MC, MD;
volatile int X1, X2, B5, T;
uint8_t tmp_str[] = {0x00,0x00,'.',0x00,'\n'};
i2cTransaction.slaveAddress = i2c_bmp180_addr;
// 讀取bmp180的常數
bmp180_read_cmd[0] = AC5_ADDR;
i2cTransaction.writeBuf = bmp180_read_cmd;
i2cTransaction.writeCount = 1;
i2cTransaction.readBuf = bmp180_read_buf;
i2cTransaction.readCount = 2;
transferFlag = I2C_transfer(i2c, &i2cTransaction);
AC5 = bmp180_read_buf[0]; AC5 <<= 8; AC5 += bmp180_read_buf[1];
bmp180_read_cmd[0] = AC6_ADDR;
i2cTransaction.writeBuf = bmp180_read_cmd;
i2cTransaction.writeCount = 1;
i2cTransaction.readBuf = bmp180_read_buf;
i2cTransaction.readCount = 2;
transferFlag = I2C_transfer(i2c, &i2cTransaction);
AC6 = bmp180_read_buf[0]; AC6 <<= 8; AC6 += bmp180_read_buf[1];
bmp180_read_cmd[0] = MC_ADDR;
i2cTransaction.writeBuf = bmp180_read_cmd;
i2cTransaction.writeCount = 1;
i2cTransaction.readBuf = bmp180_read_buf;
i2cTransaction.readCount = 2;
transferFlag = I2C_transfer(i2c, &i2cTransaction);
MC_pre = bmp180_read_buf[0]; MC_pre <<= 8; MC_pre += bmp180_read_buf[1];
if (MC_pre<=32767) MC = MC_pre;
else MC = -65536 + MC_pre;
bmp180_read_cmd[0] = MD_ADDR;
i2cTransaction.writeBuf = bmp180_read_cmd;
i2cTransaction.writeCount = 1;
i2cTransaction.readBuf = bmp180_read_buf;
i2cTransaction.readCount = 2;
transferFlag = I2C_transfer(i2c, &i2cTransaction);
MD_pre = bmp180_read_buf[0]; MD_pre <<= 8; MD_pre += bmp180_read_buf[1];
if (MD_pre<=32767) MD = MD_pre;
else MD = -65536 + MD_pre;
while(1){
i2cTransaction.writeBuf = bmp180_start_cmd;
i2cTransaction.writeCount = 2;
i2cTransaction.readBuf = NULL;
i2cTransaction.readCount = 0;
i2cTransaction.arg = NULL;
i2cTransaction.nextPtr = NULL;
transferFlag = I2C_transfer(i2c, &i2cTransaction);
if (transferFlag == NULL){
System_abort("Error in BMP180 Write");
}
Task_sleep(5);
bmp180_read_cmd[0] = TMP_ADDR;
i2cTransaction.writeBuf = bmp180_read_cmd;
i2cTransaction.writeCount = 1;
i2cTransaction.readBuf = bmp180_read_buf;
i2cTransaction.readCount = 2;
i2cTransaction.arg = NULL;
i2cTransaction.nextPtr = NULL;
transferFlag = I2C_transfer(i2c, &i2cTransaction);
if (transferFlag == NULL){
System_abort("Error in BMP180 Read");
}
UT = bmp180_read_buf[0];
UT <<= 8;
UT += bmp180_read_buf[1];
X1 = ((UT-AC6)*AC5)>>15;
X2 = (MC<<11)/(X1+MD);
B5 = X1 + X2;
T = ((B5+8) >> 4);
tmp_str[0] = (T/100) + '0';
T = T % 100;
tmp_str[1] = (T/10) + '0';
T = T % 10;
tmp_str[3] = T + '0';
// 串口上傳,串口的初始化程式各種例程都有
UART_write( uart, tmp_str, 5);
Task_sleep(arg0 - 10);
}
}
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/394069.html
標籤:其他