在高級駕駛輔助系統(ADAS)領域,存在多種常用的坐標系:LiDAR坐標系、車輛坐標系、相機坐標系、影像坐標系等,在筆者最近的實習程序中,和這些坐標系頻繁打交道,作為第一次在CSDN發文,本文將詳細總結坐標變換矩陣,
目錄
1. 何為坐標變換矩陣 (Transformation Matrix)
2. 旋轉變換矩陣(Rotation Matrix)
3. 縮放變換矩陣(Scale Matrix)
4. 平移變換矩陣(Translation Matrix)
5. 綜合變換
6. 小結
1. 何為坐標變換矩陣 (Transformation Matrix)
首先要回答一個問題,何為坐標變換矩陣呢?
“橫看成嶺側成峰,遠近高低各不同”,這說明了參照系的選取對我們觀察事物的重要性,在以上所舉例的坐標系變換的語境下,點是客觀存在的,而坐標系則是根據不同的應用場景人為選擇的,處理pcd點云資料時,需要三維的LiDAR坐標系;查看影像時,需要二維的影像坐標系(通常為1920*1080等尺寸),即:
“點不變,坐標系進行變換,”
而坐標變換矩陣,就是在這種變換坐標系的前后,點的數值的變換映射關系矩陣,注意,點不動,坐標系動,下文討論三種變換矩陣:旋轉變換矩陣、縮放變換矩陣和平移變換矩陣,
2. 旋轉變換矩陣(Rotation Matrix)
2.1 二維情形
如圖1所示,在二維平面xoy上,由綠色坐標系逆時針旋轉θ°到藍色坐標系,可以看到,點A是沒有移動的,變化的是點A分別在前后兩個坐標系中的坐標,即從變換到了
,
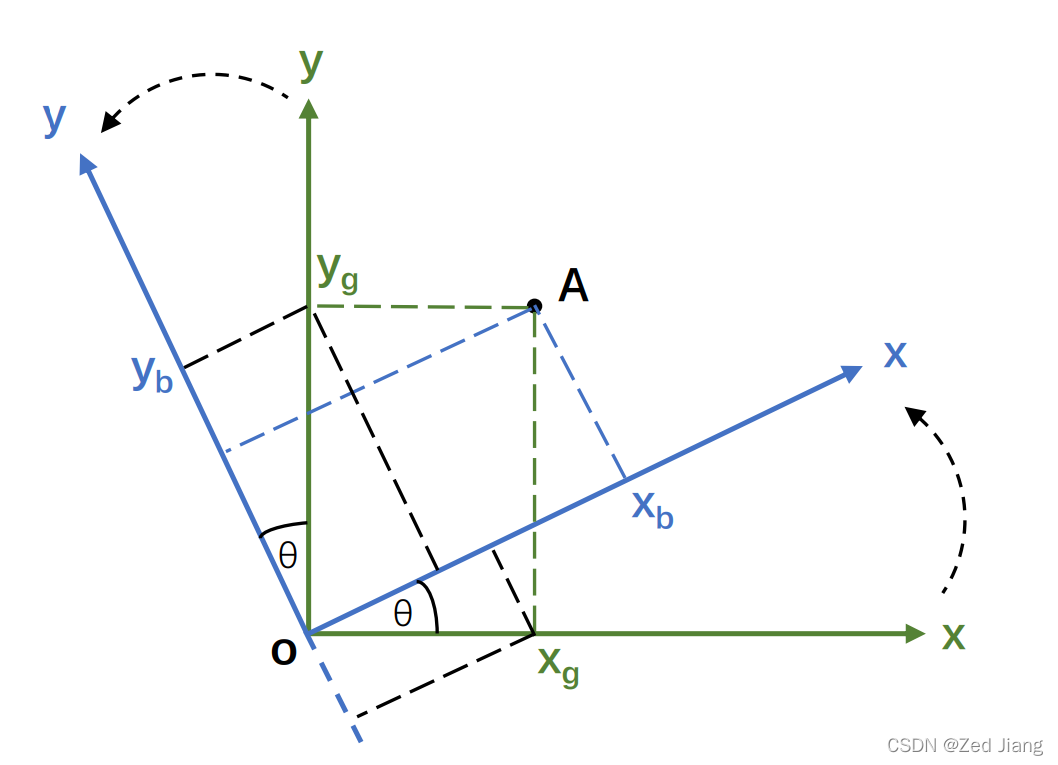
如圖1中黑色虛線的分解方式所示,通過矢量分解(類似于物理中力、速度等矢量的分解),將綠色坐標系中的分別分解到藍色坐標系的x軸和y軸上,可以得到:
用矩陣表示為:
其中R則為二維情形下的旋轉變換矩陣,它表示了A點在前后坐標系中的值的映射關系,
2.2 三維情形
有了上述在二維平面旋轉的基礎,三維空間的旋轉矩陣也就不難得出了,
即繞x軸,y軸,z軸分別進行旋轉,最后將這三個旋轉變換矩陣相乘,就能得到在三維空間任意角度的旋轉變換矩陣了,(xyz軸滿足右手系關系)
在繞x軸旋轉的時候,可以看作在yoz二維平面上的旋轉,此時x的值不變,
在繞y軸旋轉的時候,可以看作在zox二維平面上的旋轉,此時y的值不變,
在繞z軸旋轉的時候,可以看作在xoy二維平面上的旋轉,此時z的值不變,
最終的三維旋轉變換矩陣就是上面三個矩陣相乘,意為三維坐標系分別繞x軸、y軸和z軸旋轉相應的角度,
2.3 順時針?逆時針?
在筆者初次接觸旋轉概念之時,常常對何時順時針,何時逆時針十分頭疼,
高中就接觸到點的旋轉矩陣R(rotation matrix of a point),在這種情況下是坐標系不變,點繞坐標原點順時針旋轉 θ°,
而在本文的情形下,旋轉變換矩陣的形式完全一致,但是方向卻相反了——變成了逆時針!究其原因,還是上文老生常談的那點,高中的矩陣是點動系不動,而本文是系動點不動,因此方向正好相反了,
回到本文的系動點不動,此時再從兩種角度推匯出順時針旋轉的公式,
1)θ變為-θ:此時就是選擇了相反的旋轉角度,變成順時針,
2)求原矩陣的逆矩陣:先逆時針,再順時針,相當于回到原系,也就是坐標和單位矩陣相乘,
可以得到,坐標系順時針旋轉θ°的旋轉變換矩陣為:
3. 縮放變換矩陣(Scale Matrix)
除了旋轉變換,還有坐標數值的純粹放大縮小變換,即縮放變換,下面直接給出縮放變換的公式:
上式中點的x, y, z坐標值分別擴大(縮小)了Scale.x, Scale.y, Scale.z倍,
縮放矩陣同樣存在“系動點不動”還是“點動系不動”的問題,如果是“點動系不動”,那么S矩陣中的Scale.x, Scale.y, Scale.z就是單純的點x, y, z的擴大(縮小)倍數,
如果是本文重點探討的“系動點不動”,那么S矩陣中的Scale.x, Scale.y, Scale.z就是坐標系的x, y, z軸的單位擴大(縮小)倍數的倒數,換言之,如果坐標軸單位放大Scale倍,那么點x, y, z的值就要縮小Scale倍,可以用千米和米的轉換來思考這個問題,如果單位是m,一個物體長1000m,當單位變為km后,這個物體就長1km了,單位擴大的同時,數值上從1000縮小為了1,
4. 平移變換矩陣(Translation Matrix)
坐標系的旋轉和縮放可以通過3*3的變換矩陣完成,但是平移就需要將3*3擴展到4*4,引入齊次變換矩陣,下面直接給出平移變換矩陣的公式:
具體程序即:
平移矩陣同樣存在“系動點不動”還是“點動系不動”的問題,
如果是本文重點探討的“系動點不動”,如果系向左(x軸負方向)/后(y軸負方向)/下(z軸負方向)平移,那么T矩陣中的Translation.x, Translation.y, Translation.z為正;如果系向右(x軸正方向)/前(y軸正方向)/上(z軸正方向)平移,那么T矩陣中的Translation.x, Translation.y, Translation.z為負,可以借助爬樓梯來理解,小明在地面抬頭看著5樓,五樓相當于+5,當小明爬到5樓的時候,此時五樓相當于0了,小明爬到10樓的時候,此時五樓就相當于-5了,小明就是坐標系的原點,5樓就是不動的一個點,
5. 綜合變換
將變換矩陣和點向量全部齊次化:
那么此時,對于不動點,如果按照“旋轉-縮放-平移”的順序變換坐標系后,此點的值產生如下變換:
6. 小結
ADAS中涉及多種坐標系的變換,點的坐標會隨著坐標系的變換而變化,坐標變換矩陣就是在坐標系變換前后,點的數值的映射關系矩陣,主要有旋轉變換矩陣、縮放變換矩陣和平移變換矩陣等,極其重要和容易混淆的是,在具體的應用場景中,是什么在變,什么不變,是系還是點,矩陣的具體實作可以采用python中的numpy模塊,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/397518.html
標籤:其他