一、單目標定
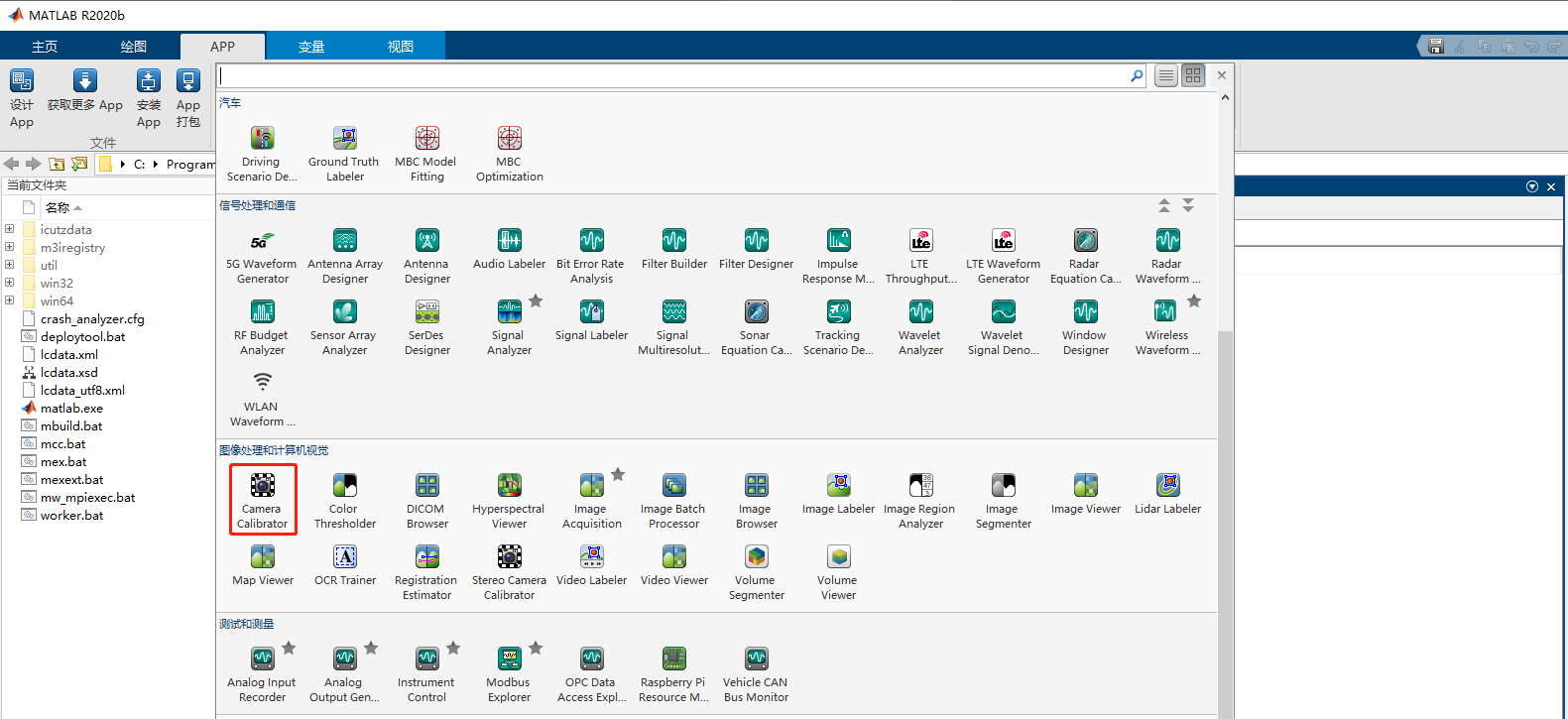
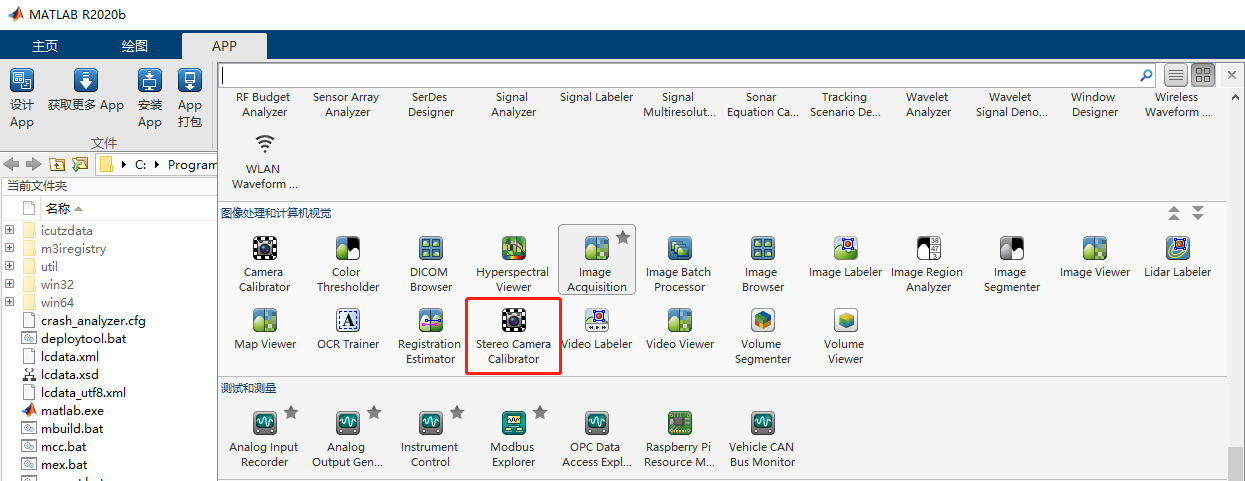
1、打開MATLAB,選擇APP,選擇Camera Calibrator
2、點擊添加圖片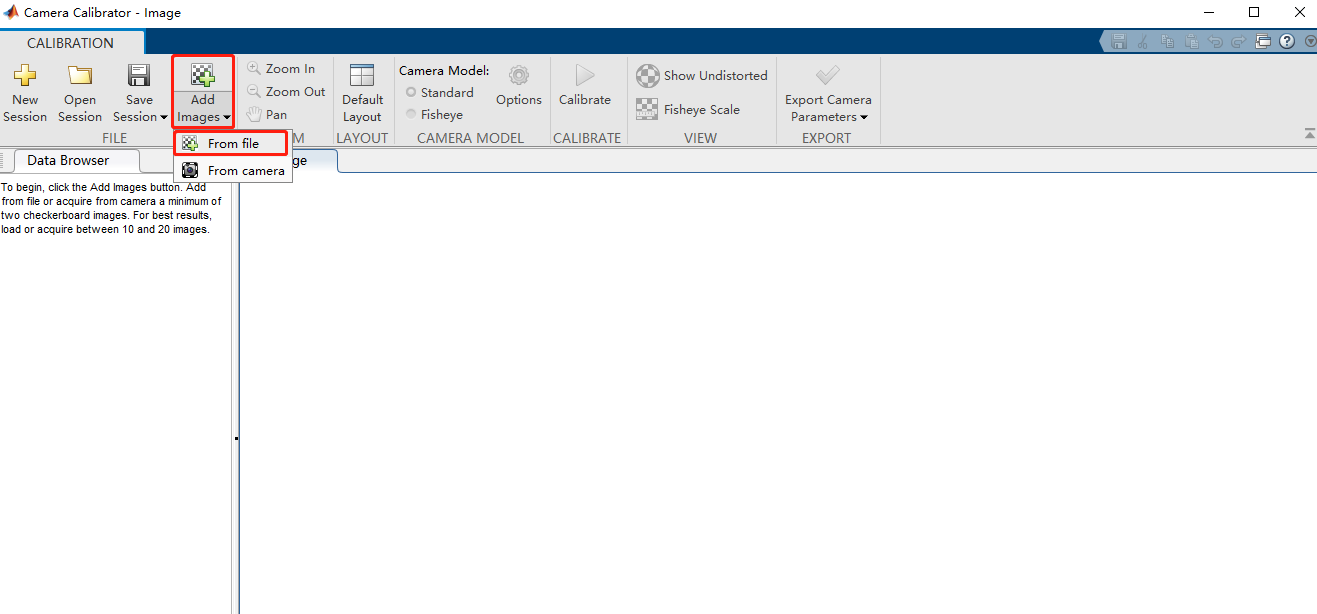
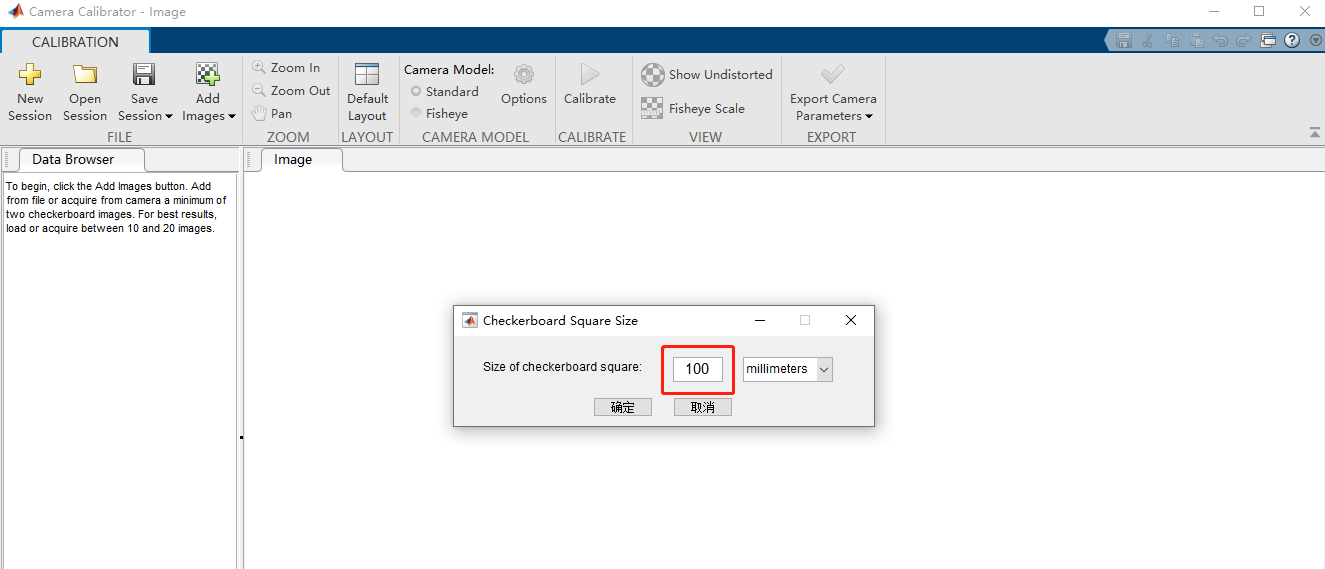
3、確定每一個棋盤格子的真實長度
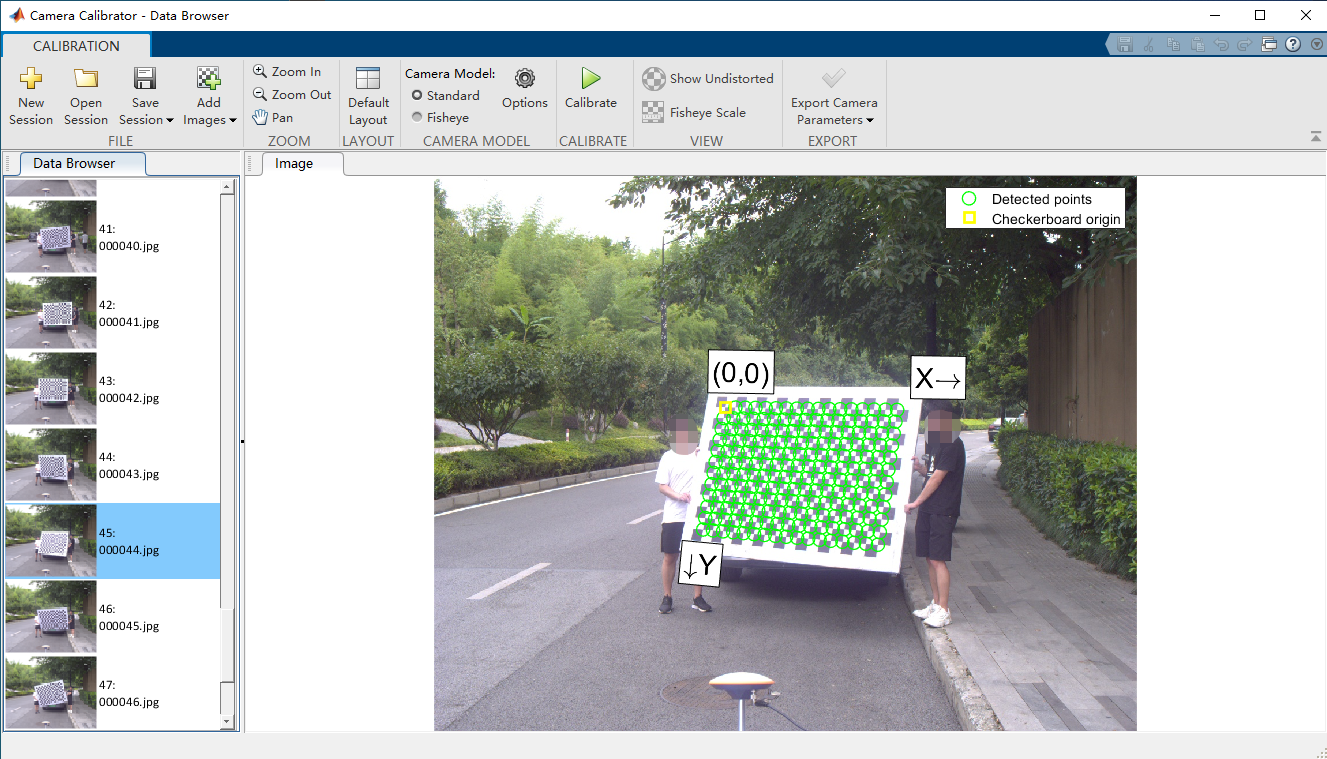
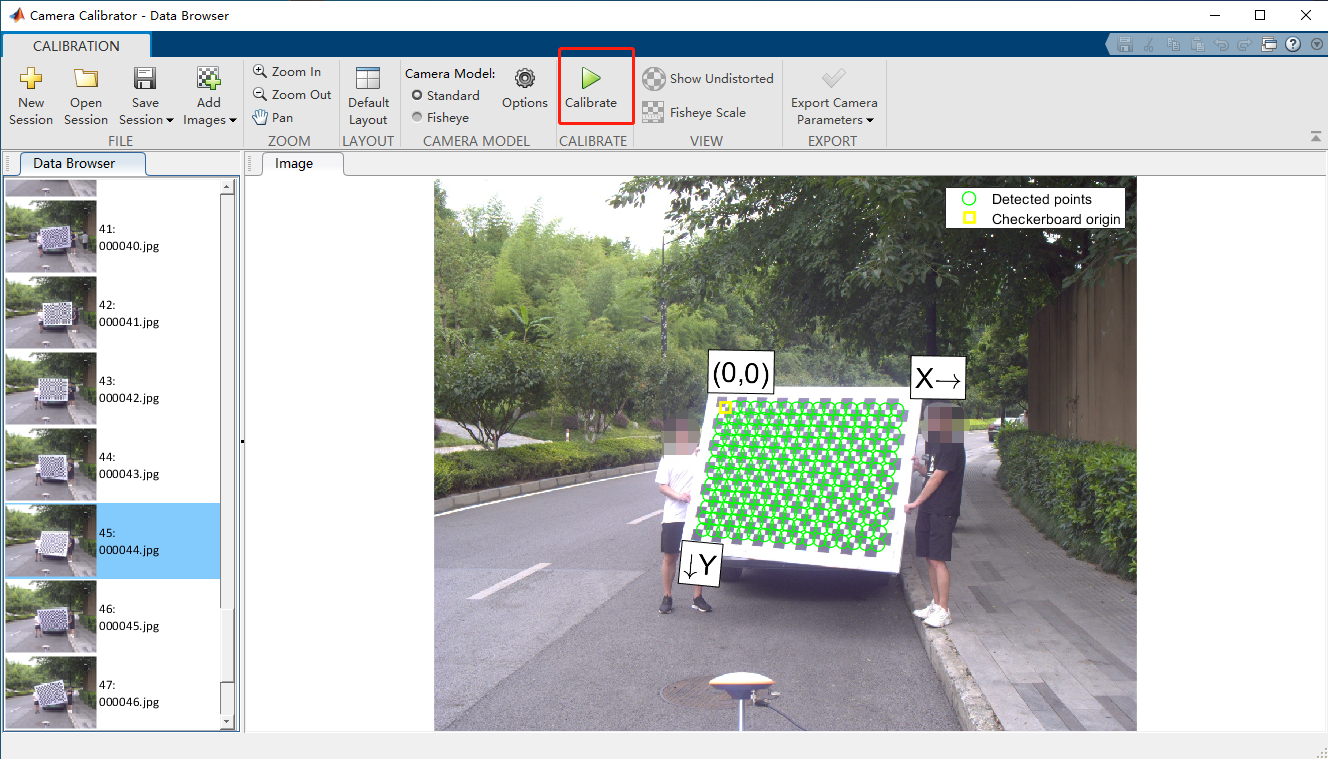
4、點擊確定后,出現下圖
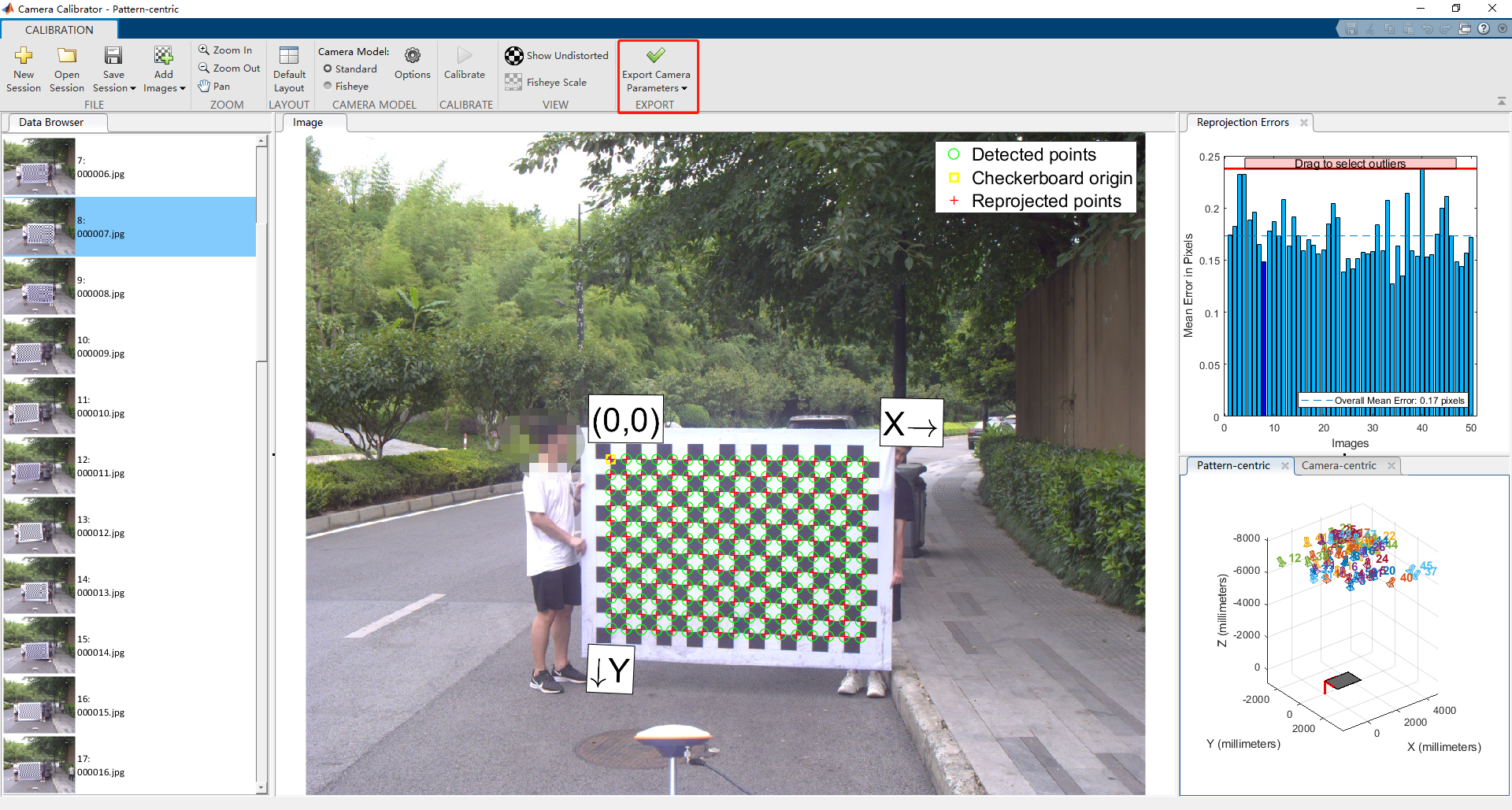
5、點擊 Calibrator,開始標定
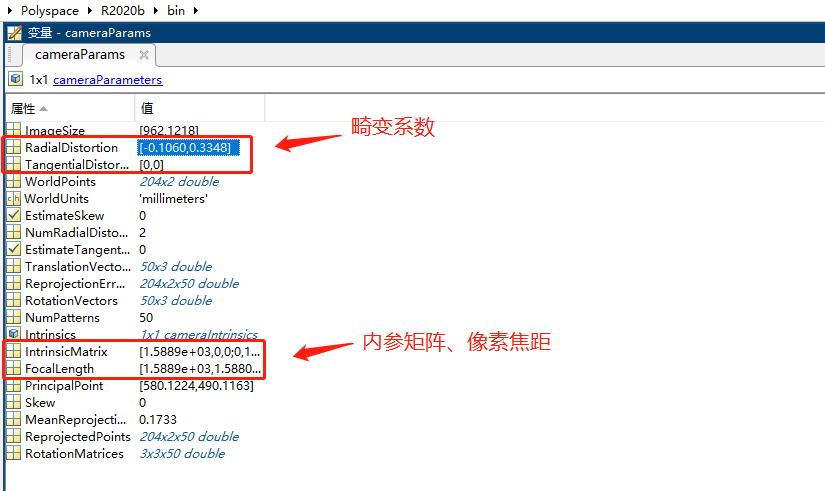
6、匯出引數
7、相機引數如下
以上就完成了單目相機的標定,具體的標定引數及使用說明,可以參見:三維視覺 | 02 雙目標定程序、引數說明
二、雙目標定
1、選擇APP下的立體相機標定工具
2、添加圖片路徑,并設定棋盤格實際邊長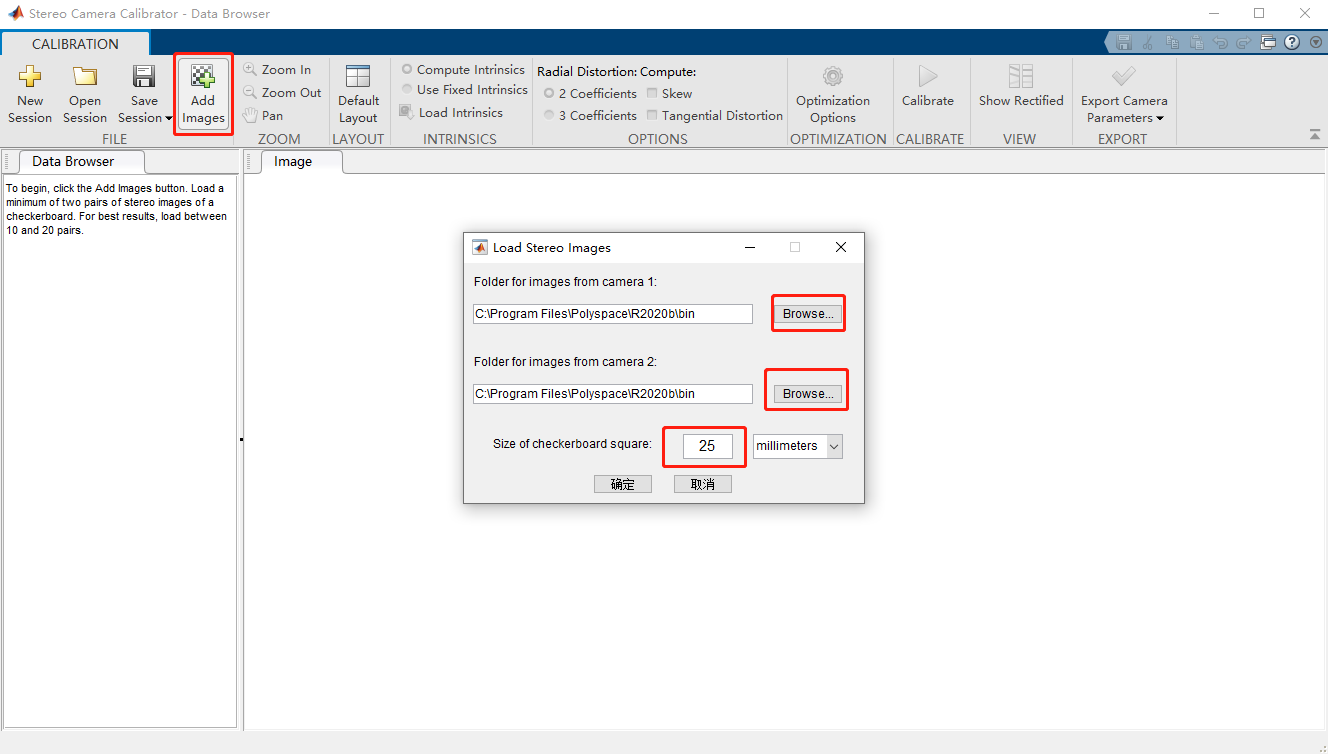
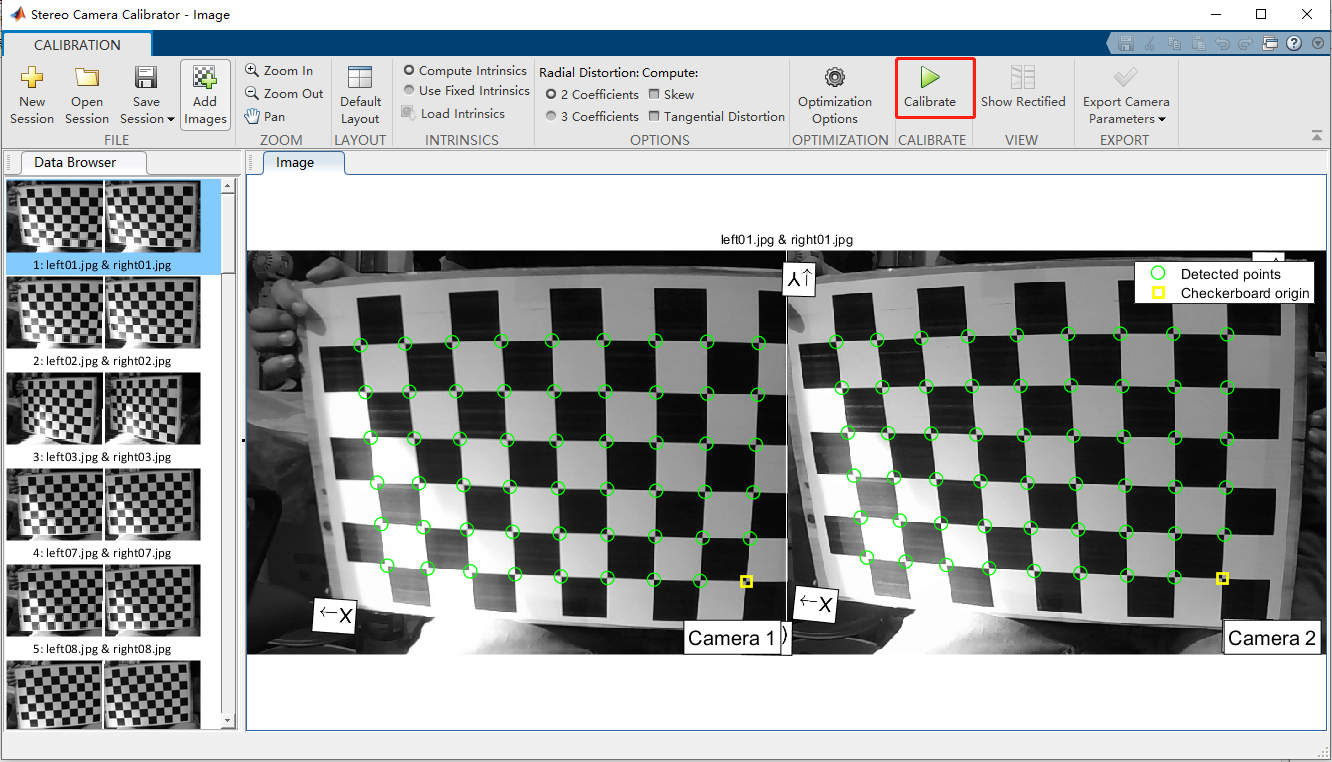
3、開始標定
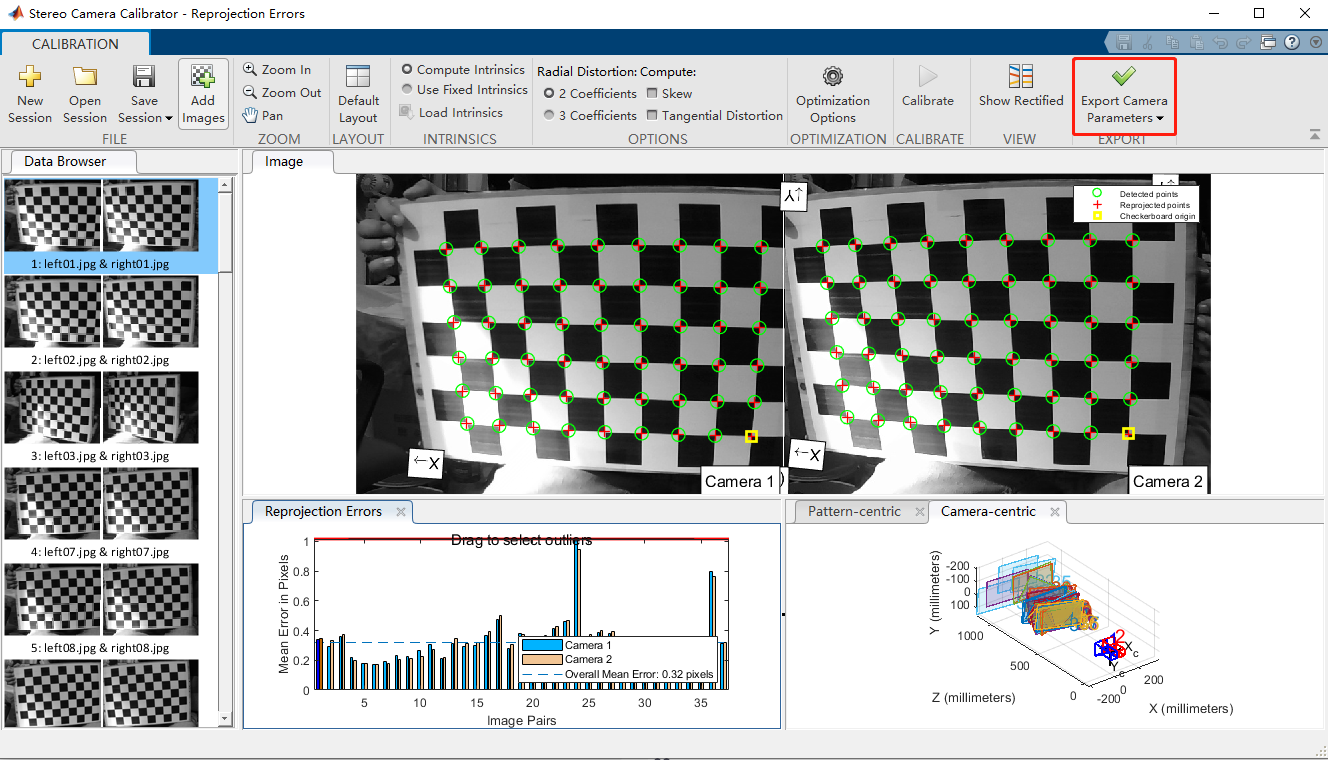
4、匯出標定引數
5、標定引數說明
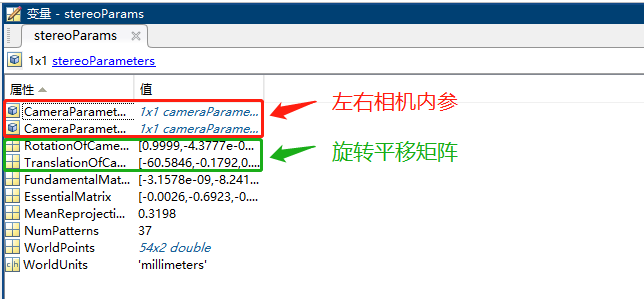
以上就完成了雙目相機的標定,具體的標定引數及使用說明,可以參見:三維視覺 | 02 雙目標定程序、引數說明

又到了一年一度的【博客之星】評選,各位家人們,記得給個五星好評哦,你的鼓勵將是我創作的做大動力!
拉到文末,點擊五星好評即可:2021年「博客之星」參賽博主:AI 菌

轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/397515.html
標籤:其他
上一篇:【機器視覺案例】(5) AI視覺,手勢調節物體尺寸,附python完整代碼
下一篇:詳解坐標變換矩陣