一個攝像頭無法獲取深度資訊,兩個攝像頭雙目標定可以實作雙目測距,
但是我現在只有一個攝像頭,如果想實作測量尺寸,我的思路:選一張固定尺寸的背景,例如一張A4紙,從影像中提取A4紙并進行透視變換進行影像矯正,A4紙的尺寸我可以確定,那么也可以確定影像中的物體長寬資訊(高度忽略不計的情況,例如:卡片),當攝像頭距離目標物距離L,此時像素所占面積為S,那么理論上來說,目標物影像變化后的面積為S1,則距離L1=(L/S)*S1,假定目標物上面貼有很多個面積為1平方厘米的正方形貼紙,那么獲取四個角點和四條邊的資訊通過演算法可以獲取出物體在深度方向上的偏移量,有想法就實踐,
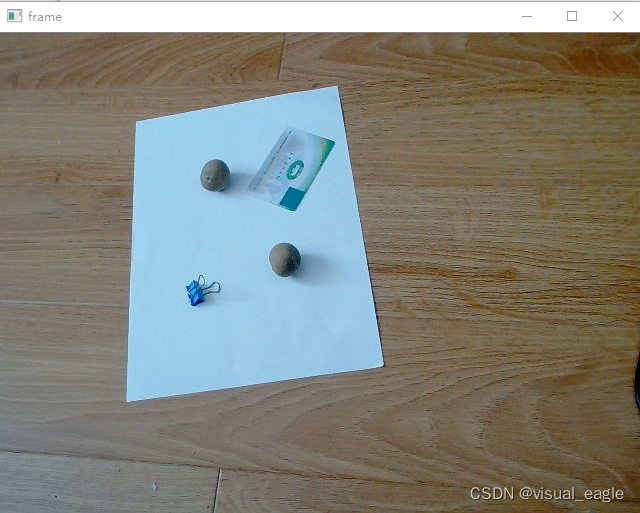
1.在地板上放一張A4紙隨便放一些物體,利用opencv打開攝像頭獲取影像并顯示,
2.轉灰度影像
3.如果直接使用canny的畫周圍地板的線條不好去除,所以先二值化分割,

4.觀察影像中存在噪點,使用中值濾波處理

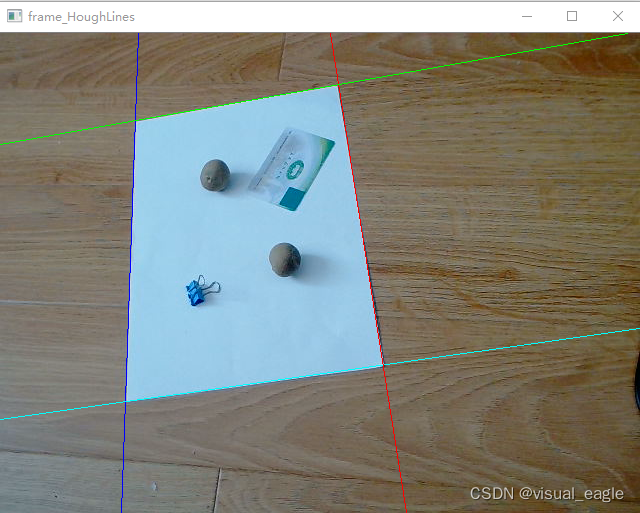
5.使用canny進行邊緣檢測

6.使用累加器方法進行直線擬合
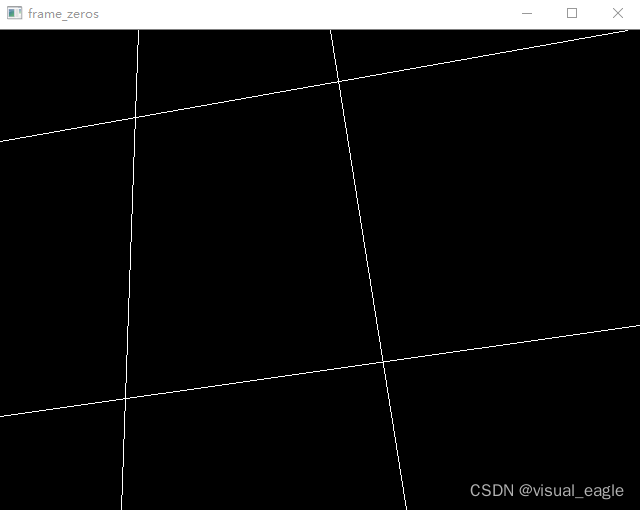
7.得到了四條線段,此時可以求交點,但是我這里為了方便直接角點檢測
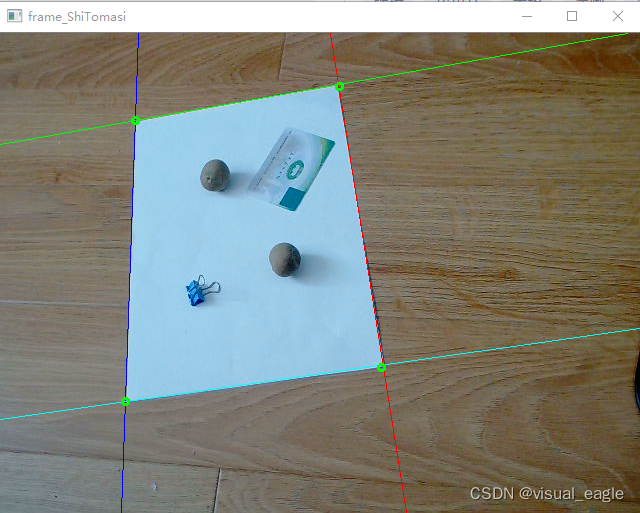 8.得到角點排序后進行透視變換
8.得到角點排序后進行透視變換

實作1-8效果代碼:
#include<opencv2/opencv.hpp>
using namespace cv;
using namespace std;
double x_1[4];
double y_1[4];
double x_2[4];
double y_2[4];
double line_k[4];
double line_b[4];
int line_number=0;
// 獲取交點
//void getCross()
//{
// for (int i = 0; i <line_number; i++)
// {
// for(int j=i+1;j<line_number;j++)
// {
// if(int(abs(line_k[i]))==0&&int(abs(line_k[j]))==0)
// {
// cout<<"i:"<<i<<" j:"<<j<<" is "<<" true"<<endl;
// }
// }
// }
//}
void drawLine(Mat &img, //要標記直線的影像
vector<Vec2f> lines, //檢測的直線資料
double rows, //原影像的行數(高)
double cols, //原影像的列數(寬)
Scalar scalar, //繪制直線的顏色
int n //繪制直線的線寬
)
{
int image_channels=img.channels();
Point pt1, pt2;
for (size_t i = 0; i < lines.size(); i++)
{
float rho = lines[i][0]; //直線距離坐標原點的距離
float theta = lines[i][1]; //直線過坐標原點垂線與x軸夾角
double a = cos(theta); //夾角的余弦值
double b = sin(theta); //夾角的正弦值
double x0 = a*rho, y0 = b*rho; //直線與過坐標原點的垂線的交點
double length = max(rows, cols); //影像高寬的最大值
//計算直線上的一點
pt1.x = cvRound(x0 + length * (-b));
pt1.y = cvRound(y0 + length * (a));
//計算直線上另一點
pt2.x = cvRound(x0 - length * (-b));
pt2.y = cvRound(y0 - length * (a));
//兩點繪制一條直線
if(i==0&&image_channels!=1)
{
scalar=Scalar(255,0,0);//blue
}
else if(i==1&&image_channels!=1)
{
scalar=Scalar(255,255,0);//yellow
}
else if(i==2&&image_channels!=1)
{
scalar=Scalar(0,0,255);//red
}
else if(i==3&&image_channels!=1)
{
scalar=Scalar(0,255,0);//green
}
else;
if(image_channels==1)
{
scalar=Scalar(255,255,255);
}
line(img, pt1, pt2, scalar, n);
//計算直線方程
x_1[i]=pt1.x;
y_1[i]=pt1.y;
x_2[i]=pt2.x;
y_2[i]=pt2.y;
line_k[i]=(y_2[i]-y_1[i])/(x_2[i]-x_1[i]);
line_b[i]=y_1[i]-line_k[i]*x_1[i];
cout<<i+1<<":"<<"y="<<line_k[i]<<"*x+"<<line_b[i]<<endl;
}
cout<<"lines_number:"<<lines.size()<<endl;
line_number=lines.size();
// getCross();
}
int main(int argc, char *argv[])
{
VideoCapture cap;
cap.open(0);
Mat frame;
Mat src;
while(line_number!=4)
{
cap>>frame;
src=frame;
imshow("frame",frame);
Mat frame_gray;
cvtColor(frame,frame_gray,COLOR_BGR2GRAY);
imshow("frame_gray",frame_gray);
Mat frame_threshold;
threshold(frame_gray,frame_threshold,160,255,THRESH_BINARY);//frame_gray(x,y)>160 frame_threshold(x,y)=255 else 0
imshow("frame_threshold",frame_threshold);
Mat frame_medianBlur;
medianBlur(frame_threshold, frame_medianBlur, 3);
imshow("frame_medianBlur",frame_medianBlur);
Mat frame_Canny;
Canny(frame_medianBlur, frame_Canny, 10, 180, 3, false);
imshow("frame_Canny",frame_Canny);
//累加器進行檢測直線
vector<Vec2f> lines;
HoughLines(frame_Canny, lines, 1, CV_PI / 180, 100, 0, 0);
Mat frame_HoughLines=frame;
drawLine(frame_HoughLines, lines, frame_HoughLines.rows, frame_HoughLines.cols, Scalar(0,0,0), 1);
imshow("frame_HoughLines",frame_HoughLines);
Mat frame_zeros = Mat::zeros(frame_HoughLines.rows, frame_HoughLines.cols, CV_8UC1);
drawLine(frame_zeros, lines, frame_HoughLines.rows, frame_HoughLines.cols, Scalar(0,0,0), 1);
imshow("frame_zeros",frame_zeros);
vector<Point2f> conners;//檢測到的角點
int maxConers = 4;//檢測角點上限
double qualityLevel = 0.1;//最小特征值
double minDistance = 20;//最小距離
Mat frame_ShiTomasi=frame;
goodFeaturesToTrack(frame_zeros, conners, maxConers, qualityLevel, minDistance);
cout<<"Shi-Tomasi(x,y):"<<conners<<endl;
//角點繪制
for (int i = 0; i < conners.size(); i++)
{
// string text=to_string(i)+"(x,y):"+"("+to_string((int)conners[i].x)+","+to_string((int)conners[i].y)+")";
// cv::putText(frame_ShiTomasi, text, conners[i], FONT_HERSHEY_COMPLEX, 0.6, cv::Scalar(0, 0, 0), 1.4, 8, 0);
circle(frame_ShiTomasi, conners[i], 3, Scalar(0,255,0), 2, 8, 0);
}
//分割四個坐標
int width_flag=frame_HoughLines.cols/2;
int height_flag=frame_HoughLines.rows/2;
vector<Point2f>srcpoint(4);//存放變換前四頂點
for (int i = 0; i < conners.size(); i++)
{
if(conners[i].x<width_flag&&conners[i].y<height_flag)
{
// cv::putText(frame_ShiTomasi, "left1", conners[i], FONT_HERSHEY_COMPLEX, 0.6, cv::Scalar(0, 0, 0), 1.4, 8, 0);
srcpoint[0]=conners[i];
}
else if(conners[i].x>width_flag&&conners[i].y<height_flag)
{
// cv::putText(frame_ShiTomasi, "right1", conners[i], FONT_HERSHEY_COMPLEX, 0.6, cv::Scalar(0, 0, 0), 1.4, 8, 0);
srcpoint[1]=conners[i];
}
else if(conners[i].x<width_flag&&conners[i].y>height_flag)
{
// cv::putText(frame_ShiTomasi, "left2", conners[i], FONT_HERSHEY_COMPLEX, 0.6, cv::Scalar(0, 0, 0), 1.4, 8, 0);
srcpoint[2]=conners[i];
}
else if(conners[i].x>width_flag&&conners[i].y>height_flag)
{
// cv::putText(frame_ShiTomasi, "right2", conners[i], FONT_HERSHEY_COMPLEX, 0.6, cv::Scalar(0, 0, 0), 1.4, 8, 0);
srcpoint[3]=conners[i];
}
else;
}
imshow("frame_ShiTomasi",frame_ShiTomasi);
waitKey(30);
//透視變換
vector<Point2f>dstpoint(4);//存放變換后四頂點
//mm
float a4_width=2100/4;
float a4_height=2970/4;
Mat result = Mat::zeros(a4_width, a4_height,frame.type());
//定義矯正后四頂點
dstpoint[0] = Point2f(0, result.rows);
dstpoint[1] = Point2f(0, 0);
dstpoint[2] = Point2f(result.cols, result.rows);
dstpoint[3] = Point2f(result.cols, 0);
Mat M = getPerspectiveTransform(srcpoint, dstpoint);
Mat frame_result=src;
imshow("1",frame_result);
warpPerspective(frame_result, result, M, result.size());
imshow("result", result);
}
cap.release();
waitKey(0);
return 0;
}
9.進行尺寸估計(將矯正后影像傳入,最小外接矩形,然后閾值劃分,取出區域求長寬,按照比例關系估計最后的長寬比)下面代碼僅僅實作了找出最小矩形和輸出一些點資訊,由于時間有限,計算距離演算法部分后續更新,
void get_dist(Mat src)
{
cvtColor(src,src,COLOR_BGR2GRAY);
threshold(src,src,160,255,THRESH_BINARY);//frame_gray(x,y)>160 frame_threshold(x,y)=255 else 0
medianBlur(src, src, 3);
Canny(src, src, 10, 180, 3, false);
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
findContours(src, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_NONE, Point());
vector<Rect> boundRect(contours.size());
Mat drawingPicture = Mat::zeros(src.size(), CV_8UC1); //最小外接矩形畫布
int width_i=2100/8;
int height_i=2970/8;
for (int i = 0; i < contours.size(); i++)
{
//繪制輪廓的最小外結矩形
RotatedRect rect = minAreaRect(contours[i]);
Point2f P[4];
rect.points(P);
for (int j = 0; j <= 3; j++)
{
line(src, P[j], P[(j + 1) % 4], Scalar(255), 1);
cout<<"P[j],P[(j + 1) % 4]:"<<P[j]<<","<< P[(j + 1) % 4]<<endl;
}
}
imshow("dist",src);
}
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/400395.html
標籤:其他