文章目錄
- 前言
- 一、MIPI的專業名詞解釋
- 二、MIPI傳輸原理
- 三、MIPI資料電平標準
- 四、控制模式下各模式的傳輸程序
- 總結
前言
??MIPI(Mobile Industry Processor Interface)是由ARM, ST ,TI等公司成立的一個聯盟,目的是確定并推動移動應用處理器介面的開放性標準,為移動應用處理器的標準硬體和軟體界面確立規范,減少設計的復雜度,提高設計的靈活性,就如我們比較常見的攝像頭介面CSI、顯示介面DSI、射頻介面DigRF、麥克風/喇叭介面等,MIPI作為一個介面標準,它包括應用層,協議層,物理層,下面主要總結關于MIPI物理層(D-PHY)的一些知識點,
一、MIPI的專業名詞解釋
??1.CSI(Camera Serial Interface):主要指攝像模塊(影像傳感器等)的MIPI介面,
??2.DSI(Display Serial Interface):主要指顯示模塊(顯示屏等)的MIPI介面,
??3.lane:MIPI里面的基本資訊傳輸單元,兩塊使用MIPI連接的芯片,中間使用差分信號對進行連接,收發端各有一個Lane模塊,完成資料收發,有時我們經常說的幾個lane傳輸資料,可理解成幾對差分對傳輸資料,注意:lane并不是差分對,它是收發器里面的一個模塊,它包括低功耗發射器(LP-TX),低功耗接收器(LP-RX),高速發射器(HS-TX),高速接收器(HS-RX),低功耗競爭檢測器(LP-CD),
??4.C-PHY:C-PHY主要時為了提高傳輸的帶寬,C-PHY沒有同步時鐘,時鐘時嵌套在資料中,其中物理層和D-PHY完全不同,線路上采用A/B/C三線系統等等,
??5.D-PHY:提供了對DSI (串行顯示介面)和CSI(串行攝像頭介面)在物理層上的定義,采用一個差分時鐘和1-4對差分資料線來傳輸資料,D-PHY的物理層支持HS(High Speed)和LP(Low Power)兩種作業模式,HS模式下采用低壓差分信號,用于傳輸影像信號,資料傳輸采用DDR方式,即在時鐘的上下邊沿都有資料傳輸,資料傳輸速率為80M~2.5Gbps,功耗較高,LP模式下采用單端信號(LVCMOS信號),用于傳輸初始化控制信號,資料速率小于10Mbps,功耗較低,目前MIPI中運用的最多,
二、MIPI傳輸原理
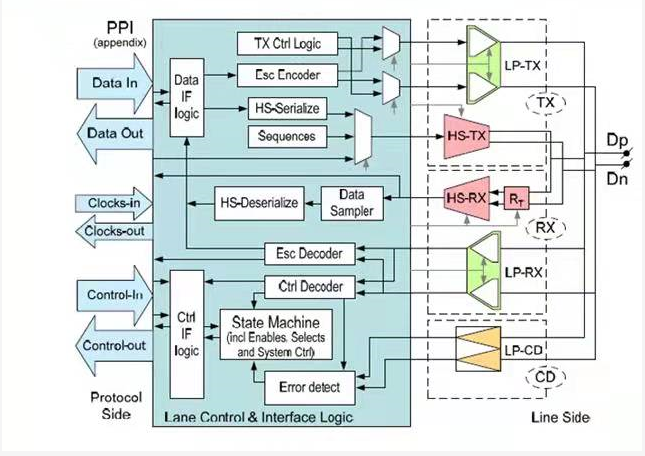
??1.MIPI的D-PHY組成:由下圖可知1lane由功耗發射器(LP-TX),低功耗接收器(LP-RX),高速發射器(HS-TX),高速接收器(HS-RX),低功耗競爭檢測器(LP-CD)組成,MIPI信號可以由一對差分時鐘和任意對差分資料組成資料傳輸通道,(1lane CLK+1lane DATA,1lane CLK+2lane DATA,1lane CLK+3lane DATA等),
下圖為MIPI的D-PHY結構組成圖
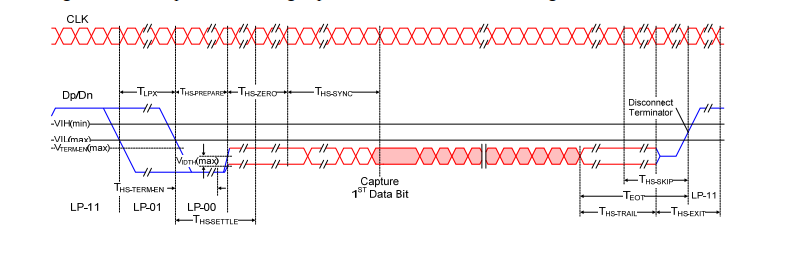
??2.MIPI的資料傳輸:MIPI信號的傳輸分為兩個模式,①控制模式:在控制模式下,高電平典型幅值為1.2V,此時P和N上的信號不是差分信號而是相互獨立的單端信號,當P為1.2V,N也為1.2V時,MIPI協議定義狀態為LP11,同理,當P為1.2V,N為0V時,定義狀態為LP10,依此類推,控制模式下可以組成LP11,LP10,LP01,LP00四個不同的狀態組成,控制模式下這4個不同狀態組成的不同時序代表著將要進入或者退出高速模式等;如下圖可知:控制信號經過LP11-LP01-LP00后,進入高速模式,用于傳輸影像資訊,此時資料通過差分信號(±200mV)進行資料的傳輸,
下圖為MIPI信號傳輸圖
三、MIPI資料電平標準
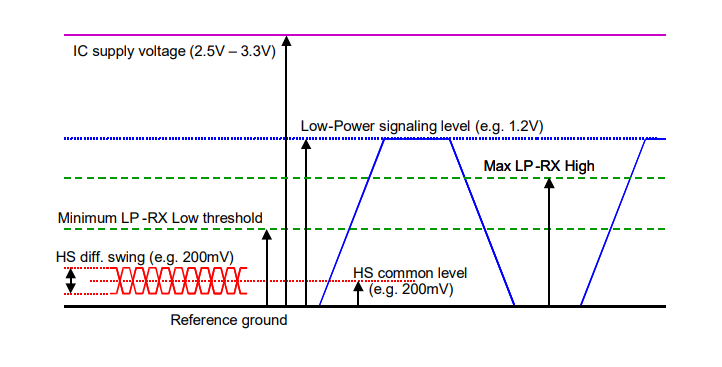
??控制模式:單端信號,幅度為1.2V,通過PN電平可構成LP11,LP10,LP01,LP00四個狀態,從而通過這四個狀態可以組成不同的控制模式,資料傳輸速率小于10MHz,
??高速模式:差分信號(SLVS),直流分量200mV,差分擺幅為±200mV,資料傳輸速率為80M~2.5Gbps,
四、控制模式下各模式的傳輸程序
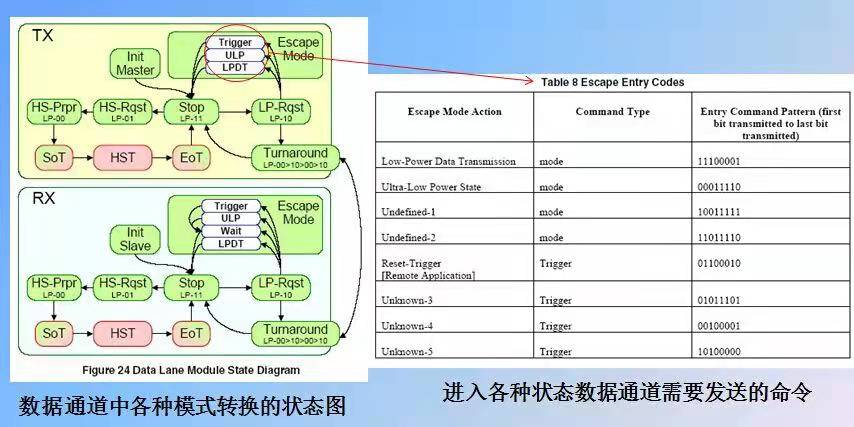
1.進入Escape模式的程序:LP-11—>LP-10—>LP-00—>LP-01—>LP-00—>Entry Code—>LPD,(10MHz)
2.退出Escape模式的程序:LP-10—>LP-11,(10MHz)
3.進入高速模式的程序:LP-11—>LP-01—>LP-00—>SOT(00011101)—>HDS,(80MHz—1GHz)
4.退出高速模式:EOT—>LP-11,
5.控制模式到BAT傳輸程序:LP-11—>LP-10—>LP-00—>LP-01—>LP-00,
6.控制模式到BAT接受程序:LP-00—>LP-10—>LP-11,
下圖為各種模式的狀態轉化圖
??
總結
??我們知道MIPI信號是以包的形式傳輸,在MIPI的CSI和DSI中,盡管他們的物理層都是采用D-PHY,但是它們的應用場景是完全不一樣的,在協議層它們的短包行同步頭,場同步頭和封包的方式都是不一樣的,所以我們在電路設計的時候需要注意器件支持的是DSI還是CSI,如果它們接錯則會導致信號的決議錯誤等問題,影響資料傳輸錯誤,盡管MIPI的傳輸有單端控制模式,但MIPI的影像資料傳輸是SLVS的差分信號,即我們在設計的時候需要嚴格按照差分信號進行設計,傳輸線路也需要100Ω的阻抗匹配,MIPI的信號傳輸分為高速和低速,高速傳輸的是直流分量為200mV,擺幅為±200mV的差分信號,低速幅值為1.2V的LVCMOS信號,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/401463.html
標籤:其他