考試要點:
第1章 緒論——填空選擇題
什么是計算機圖形學?
計算機圖形學是研究通過計算機將資料轉化為圖形,并在專門顯示設備上顯示的原理、方法和技術的學科,
簡單來說,計算機圖形學是研究怎樣用計算機生成、處理和顯示圖形的一門學科,
什么是圖形?
計算機圖形學的研究物件是圖形,主要研究物件是數學方法描述的圖形,
廣義上的圖形,是指能夠在人的視覺系統中形成視覺印象的客觀物件,它包括人眼所見的景
物,來自各種輸入媒體的圖片、圖案、影像,人工繪畫,還包括用數學方法描述的圖形以及
其他各種圖形,
計算機圖形學所研究的圖形早就超出了用數學方法描述的圖形,它不僅具有形狀等幾何資訊,還具有顏色、材質等非幾何資訊,所以它更具體,更直觀,更接近于所表示的客觀物件,
幾何要素:刻畫輪廓、形狀的點、線、面、體等
非幾何要素:反映物體表面屬性和材質的明暗、灰度、色彩、紋理、透明性、線型、線寬等,
圖形的表示有哪兩大類,包含的資訊有哪些?
(1)引數法:用圖形的形狀引數和屬性引數來表示圖形,形狀引數是指描述圖形的方程或分
析運算式的引數、線段或多邊形的端點坐標等幾何屬性,而屬性引數包括灰度、顏色和線型
等非幾何屬性,——簡稱圖形(Graphics)
(2)點陣法:通過列舉出圖形所有的點的灰度或顏色資訊來表示圖形,點陣法強調的是圖形
由哪些點組成,這些點具有什么灰度或顏色,——影像(Image)
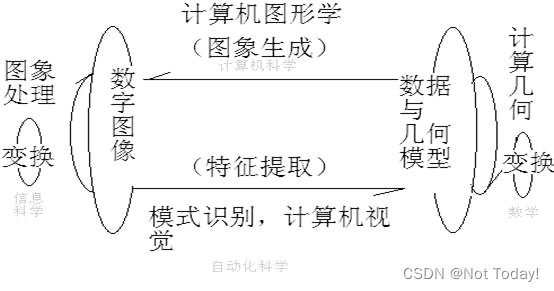
圖形學的相關學科有哪些,各自的研究內容?
?數字影像處理(Digital Image Processing)
研究影像采樣、量化、影像變換、影像去噪、影像壓縮、影像增強、邊緣處理等,
?計算幾何(Computer Aided Geometrical Design,CAGD)
研究幾何模型和及其數學模型、存盤和管理等,
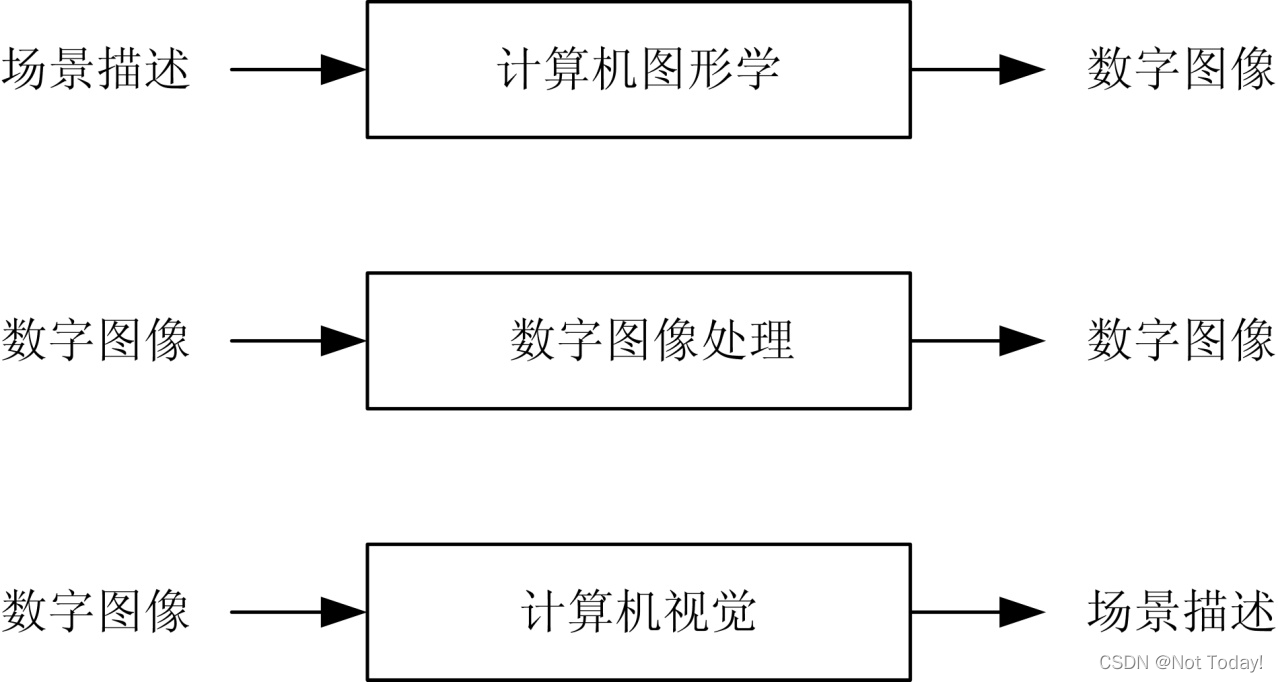
?計算機視覺(Computer Vision)與模式識別(Pattern Recognition)
模式識別進行的是計算機圖形學的逆向作業,研究如何對輸入的影像進行分析和識別,找出所輸入的影像的內在聯系或者抽象模型
?幾個學科相互聯系又相互區別
計算機圖形學著重討論怎樣將資料和幾何模型變成圖形,影像處理著重研究影像的壓縮存盤和去除噪音問題,而模式識別則重點討論如何從影像中提取資料和模型,計算幾何則著重研究幾何形體的計算機表示,分析和識別,
計算機圖形學的研究內容、發展階段和應用領域要做了解
發展動態
?1.造型技術
幾何造型技術、基于物理的造型技術、
?2.真實感圖形繪制技術
區域光照明模型、光線跟蹤方法、輻射度方法
基于影像的繪制方法(Image-based Redering)
?3.人機互動技術
GUI-WMIP,三維互動、多通道技術
?4.計算機影片
?5.地理資訊系統GIS(Geographic Information System)
研究內容
?光柵掃描圖形生成(點、線、面的離散表示)
?圖形變換(幾何變換、平行投影、透視投影)
?真實感圖形生成
(隱藏線/面去除法、Z緩沖器演算法、簡單光照模型、光線追蹤、輻射度、陰影、透明、紋理)
?幾何建模(線框模型、面模型、體模型)
?曲線與曲面生成演算法
(Furguson引數曲線/面Bézier 均勻B樣條非均勻B樣條)
?圖形學應用演算法
(與具體應用領域的演算法相結合)
發展階段
?醞釀期(50年代)
1950年麻省理工學院(MIT),旋風(Whirlwind I) I號,采用CRT圖形顯示幕;
1958年Calcomp公司將數字記錄儀發展成滾筒式繪圖儀,GerBer公司基于數控機床研制出平板式繪圖儀
?萌芽期(60年代)
1963年MIT的Ivan E. Sutherland在他的博士論文“Sketchpad:一個人-機通信的圖形系統”中首次提出“Computer Graphics (計算機圖形學)”,使用陰極射線管顯示幕和游標,可互動式地生成簡單圖形;
Coons1962年提出Coons曲面方法,CAD
?發展期(70年代)
如MIT、Bell Lab、通用汽車公司、劍橋大學等
飛機、汽車( CAD和工程分析)
?普及期(80年代)
帶有光柵圖形顯示幕的個人計算機和作業站
教育、科研、藝術、管理、游戲、以致家庭
?提高贈強蓬勃發展期(90年代及以后)
科學計算可視化、虛擬現實技術等的發展對計算機圖形學在真實性、實時性、互動性方面提出更高的要求
圖形硬體、圖形軟體、圖形演算法、圖形標準、圖形資料結構等逐漸成熟并投入使用,使計算機圖形學成為一門成熟的學科,
總體特征:技術發展、需求驅動
應用領域
?計算機輔助設計
計算機圖形學中最重要的一個應用領域就是計算機輔助設計(CAD:Computer Aided Design)計算機輔助制造(CAM),
主要包括機械、電子、建筑、航空航天等方面,用戶利用互動式圖形技術設計機械、電子設備和工程建筑等,
?圖形用戶介面
人機界面(HCI:Human Computer Interface)
圖形用戶界面(GUI:Graphical User
Interface)
?資料可視化
資訊可視化
科學計算可視化、工程計算可視化
?計算機藝術
書法
計算機繪畫
分形藝術
平面合成藝術
計算機數字影像合成
?計算機影片、廣告及娛樂
?教學與培訓、控制
?圖示圖形
?地理資訊系統
?虛擬現實環境
相關開發技術
?OpenGL技術
?DirectX技術
?Web3D技術
X3D技術
VRML技術
WebGL技術
Java3D技術
?ACIS技術
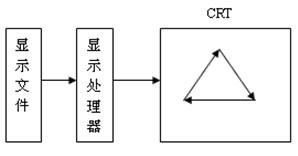
第2章 互動式計算機圖形學處理系統——主要考概念和計算
該系統組成——結構和功能等
功能:計算、存盤、對話、輸入和輸出五方面的功能
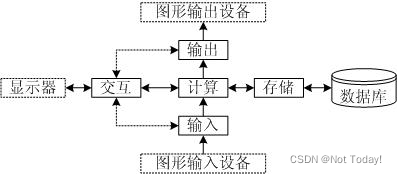
組成: 圖形軟體與圖形硬體兩部分組成
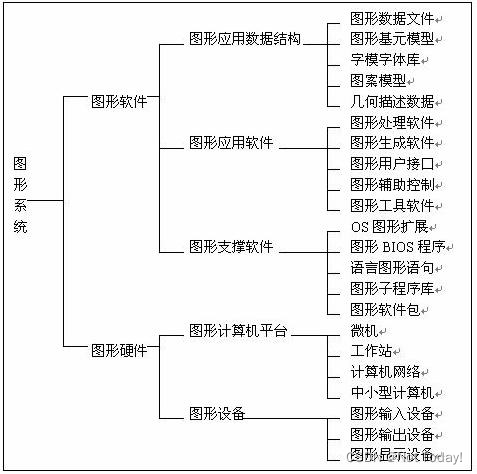
圖形硬體:包括圖形計算機系統和圖形設備兩類
圖形設備的分類(輸入、顯示、繪制)
圖形輸入設備
鍵盤(Keyboard)
滑鼠器(mouse)
游標(light pen)
觸摸屏(touch screen)
觸摸板(touch panel)
操縱桿(joystick)
手柄
跟蹤球(trackball)和空間球(spacegall)
資料手套(data glove)
數字化儀(digitizer)
圖象掃描儀(scaner)
聲頻輸入系統
視頻輸入系統
圖形顯示設備
陰極射線管(CRT)顯示幕
彩色CRT顯示幕
隨機掃描顯示幕
光柵掃描顯示幕
平板顯示幕
三維顯示系統
圖形繪制設備
列印機
繪圖儀
邏輯的輸入輸出和對輸入的處理的三種方式(采樣、事件等)——參考CG05教案
六種邏輯輸入設備:即定位設備、筆劃設備、字串設備、定值設備、選擇設備、拾取設備,
? 定位設備(Locator Device)
輸入一個位置坐標(x,y)
滑鼠、操縱桿、軌跡球、拇指輪、轉盤、數字化儀的觸筆以及其他游標定位設備
數字鍵輸入坐標值、游標
?筆劃設備(Stroke Device)
輸入一系列坐標位置
滑鼠、跟蹤球、操縱桿、數字化儀
?字串設備(String Device)
輸入一串字符
鍵盤,手寫輸入板及語音輸入
?定值設備(Valuator Device)
向圖形系統輸入數值
數字鍵、數字化儀、滑鼠、操縱桿
出標尺、刻度盤、滑桿、按鈕、選單等輔助工具
?選擇設備(Choice Device)
從一個選擇集中挑選出一個元素
功能鍵、定位設備
鍵盤和語音輸入
?拾取設備(Pick Device)
拾取螢屏上的一些圖形物件
游標
定位設備+拾取鍵
輸入模式
圖形程式和設備如何進行互動,即如何管理、控制多種圖形輸入設備進行作業
請求輸入模式、取樣輸入模式和事件輸入模式
?請求(Request)方式
程式發出從某設備輸入資料的請求,接著便等待用戶輸入資料,得到“允許從該設備輸入”的
回答后再將資料讀入,
?采樣(Sample)方式
應用程式和輸入設備同時作業,當輸入設備作業時,存盤輸入資料,不斷更新當前資料,當
程式要求輸入時,程式則對當前資料值采樣,
?事件(Event)方式
應用程式和設備將同時、各自獨立地作業,從設備輸入的資料或事件都存放在事件佇列里,
應用程式隨時可以檢查這個事件佇列,處理佇列中的事件,或洗掉佇列中的事件,事件輸入方式避免了請求方式和采樣方式中存在輸入資料丟失的問題,
重點:CRT顯示幕的構成,解析度、點距、重繪、重繪頻率、幀緩沖存盤器、顏色的概念,幀緩沖存盤器存盤資訊的兩種存盤方式,幀緩沖存盤器的容量的計算
?陰極射線管(CRT) Cathode Ray Tube
組成:包括電子槍、聚焦系統、加速電極、偏轉系統、熒光屏
?結構:
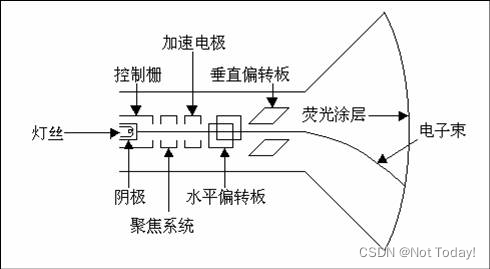
?作業原理:電子槍發射電子束,經過聚焦系統、加速電極、偏轉系統,轟擊到熒光屏的不同部位,被其內表面的熒光物質吸收,發光產生可見的光點,
解析度:CRT在水平或豎直方向單位長度上能識別的最大光點個數(物理解析度),單位通常為dpi(dots per inch),在假定螢屏尺寸一定的情況下,也可用整個螢屏所能容納的光點個數描述(邏輯解析度),如640*480,800*600,1024*768,1280*1024等等,
點距:兩個相鄰光點中心的距離
顯示速度:每秒鐘可顯示矢量線段的條數,與偏轉系統速度、矢量發生器的速度、計算機發送顯示命令的速度有關,
重繪(Refresh):為了讓熒光物質保持一個穩定的亮度值,需要控制電子束反復地重復顯示圖形,
重繪頻率:每秒鐘重繪螢屏的次數,一般50-100HZ
顏色:一般光柵掃描系統可以提供多種顏色,通常用整數值表示不同顏色,
產生彩色的常用方法:
射線穿透法
影孔板法(蔭罩法常用于光柵掃描系統)
像素位置上分布著呈三角形排列的三個熒光彩色點,三個熒光點分別發射紅光、綠光和藍光,
紅、綠、藍三基色(RGB顏色模型)
三色熒光點(很小并充分靠近--〉像素)
三支電子槍
幀緩沖存盤器(Frame Buffer)
作用:存盤螢屏上像素的顏色值
也稱重繪存盤器(Refreshing Buffer)
簡稱幀緩沖器,俗稱顯存
幀快取中單元數目與顯示幕上像素的數目相同
單元與像素一一對應
各單元的數值決定了其對應像素的顏色,
顯示顏色的種類與幀快取中每個單元的位數有關,
計算機中的幀快取(顯存)可用存放:
各像素顏色值(直接顏色值或顏色索引值)- 顏色快取
各像素深度值(三維圖形時考慮景深)- 深度快取
累積快取,用于生成運動模糊等效果
模板快取
紋理存盤
雙快取技術、三快取技術
一個快取用來重繪的同時,另一個寫入資料資訊,而后這兩個快取可互換角色,這種方式稱為雙快取,
螢屏上一個象素點就對應幀快取中的一組資訊:
組合像素法(Packed Pixel Method):一個圖形象素點的全部資訊被編碼成一個資料位元組,按照一定方式存盤到幀快取中,編碼位元組的長度與點的屬性(如顏色、灰度等)有關,
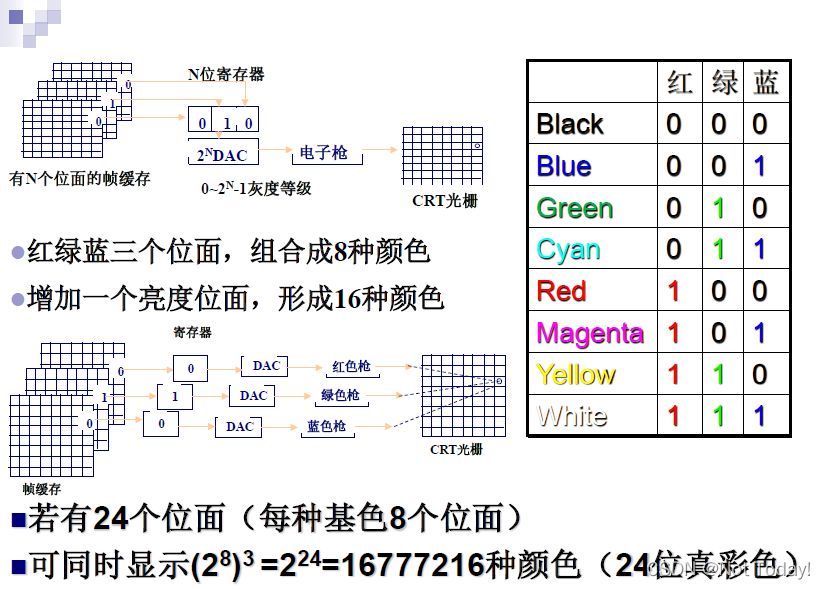
顏色位面法(Color Plane Method):
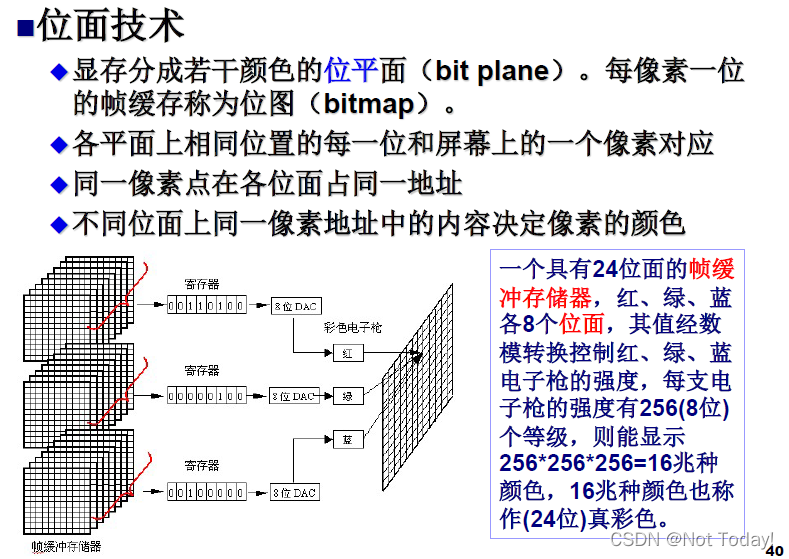
幀快取中存像素顏色資訊的兩種方式總結:
像素顏色值
組合像素法
顏色位面法
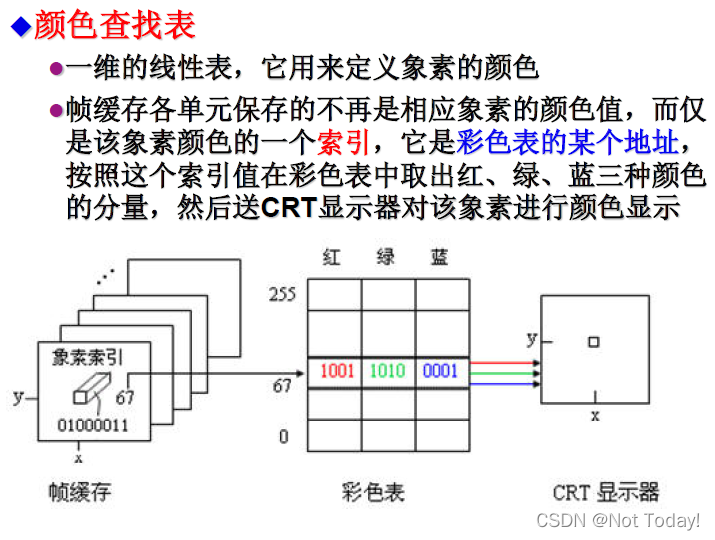
像素顏色在查色表中的索引值
光柵掃描顯示系統和隨機掃描系統的原理和優缺點
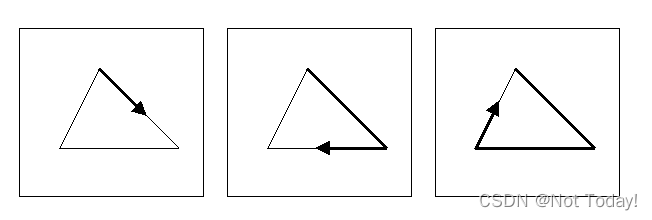
隨機掃描顯示幕(也稱矢量顯示幕)
筆劃顯示幕、筆跡顯示幕
資料表示:矢量表示,只有端點資訊,無線段中間點
掃描方式:電子束像一支快速移動的畫筆,可隨意移動(定位和偏轉),只掃描熒屏上要顯示的部分,類似示波器作業原理
顯示圖形:幾何屬性(geometric attribute)為主,線架圖
重繪顯示檔案稱為顯示串列、重繪顯示檔案、向量檔案或顯示程式,
系統周期性按顯示檔案中的命令依次畫出組成線條,
優點:掃描速度快,解析度高,線條質量好,易修改,互動性好,動態性能好
缺點:價格貴,只能顯示線畫圖形,不能顯示逼真場景
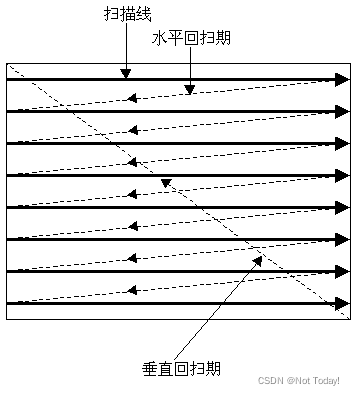
光柵掃描顯示幕
掃描方式:電子束依照固定的掃描線和規定的掃描順序進行掃描,電子束先從熒光屏左上角開始,向右掃一條水平線,然后迅速地回掃到左邊偏下一點的位置(水平回掃),再掃第二條水平線,照此固定的路徑及順序掃下去,直到最后一條水平線,即完成了整個螢屏的掃描,然后垂直回掃開始下一幀,

期中相關題目

課后習題
以上題目的答案上面都可以找到,不贅述,
第3章 基本圖形生成演算法——重點
圖形掃描轉換的概念
圖形的掃描轉換(光柵化Rasterization)
光柵掃描顯示幕的圖形顯示螢屏可以看作是一個像素矩陣, 每個像素有其位置和顏色
確定一個最佳逼近于所顯示圖形的像素集合,并用指定屬性(如顏色)寫像素的程序稱為圖形的掃描轉換或生成,也稱光柵化
直線段掃描轉換的要求
直線的掃描轉換的要求
·(1)所繪直線要直,最接近數學上的直線;
·(2)沿著線段分布的像素應均勻且連續,不出現斷裂;
·(3)直線生成的速度要快,
每一種掃描轉換演算法都要掌握原理、演算法步驟、優缺點、特點
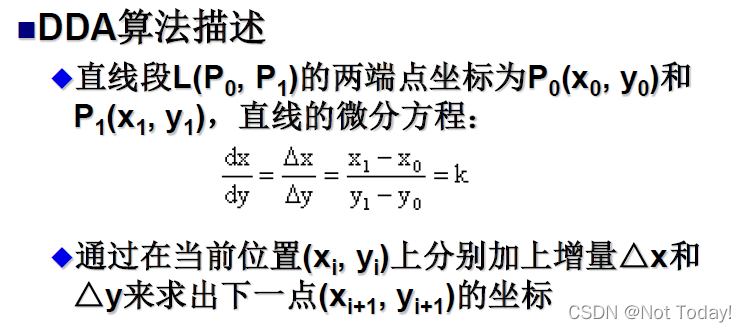
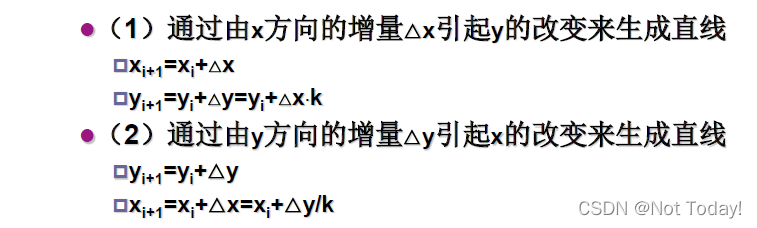
數值微分法(DDA,Digital Differential Analyzer)
——基于直線的微分方程生成直線的方法
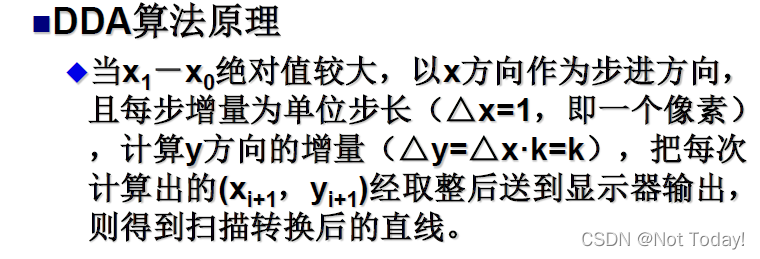
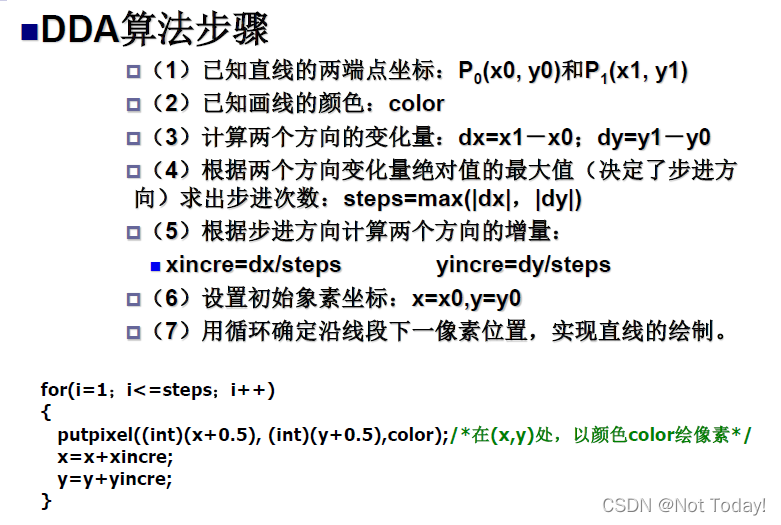
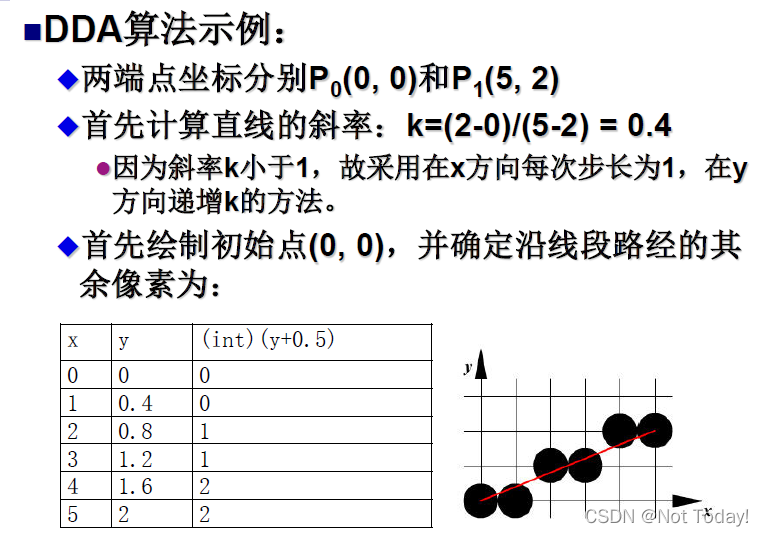
注:(int)(y+0.5)的含義是對y進行向上取整,
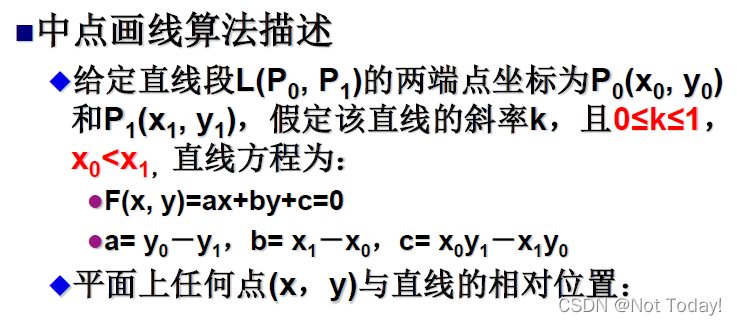
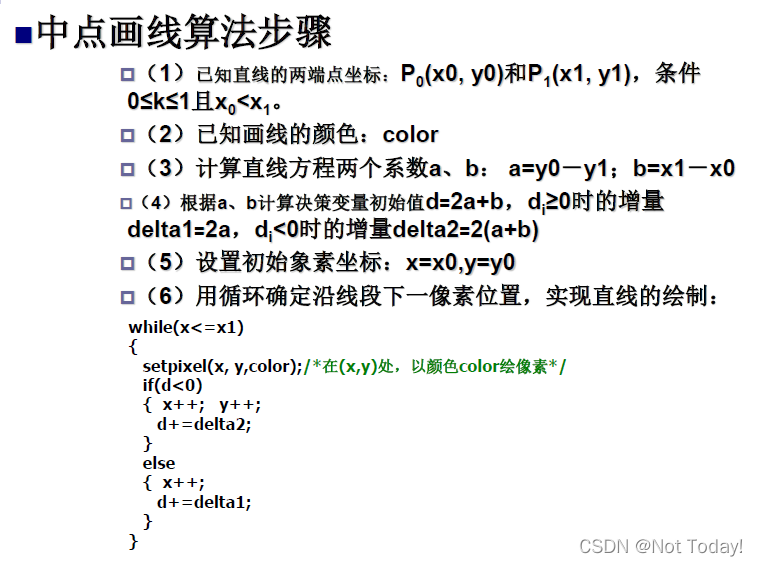
中點畫線演算法(Midpoint Line Drawing Algorithm)
——通過在每列像素中確定與理想直線最佳逼近的像素來進行掃描轉換

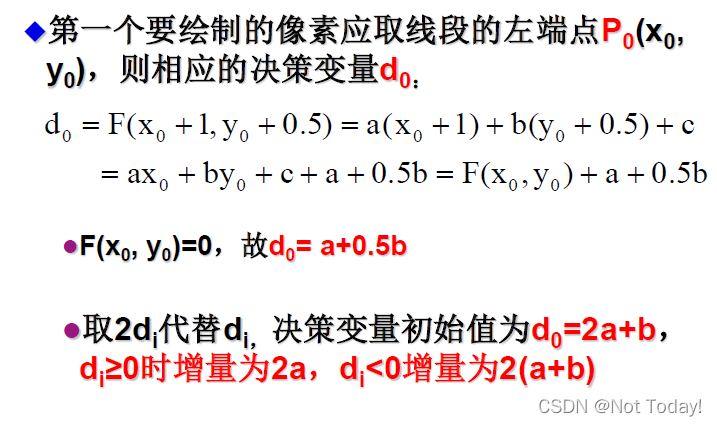
注:去2di代替di的原因是0.5b要進行浮點數運算,故通過取2di代替di,來消除小數運算,
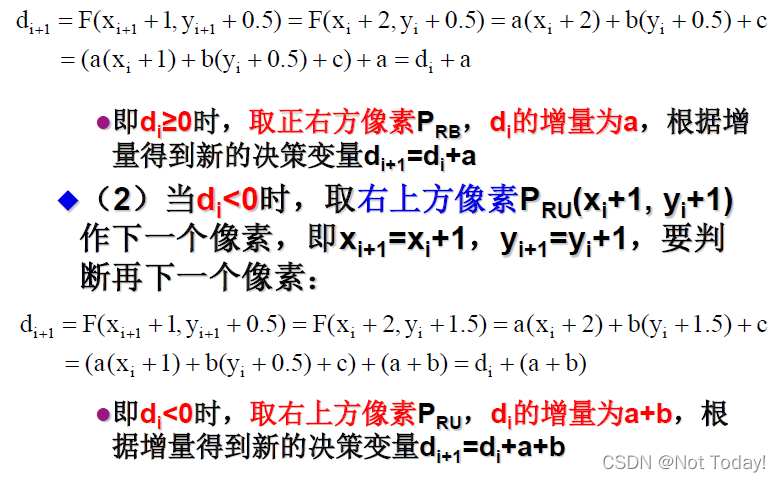
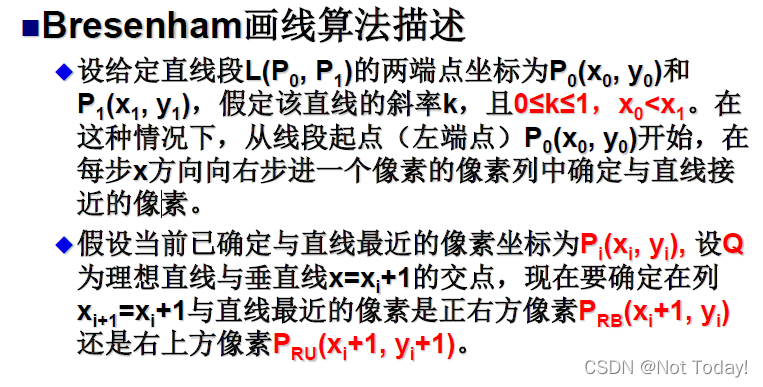
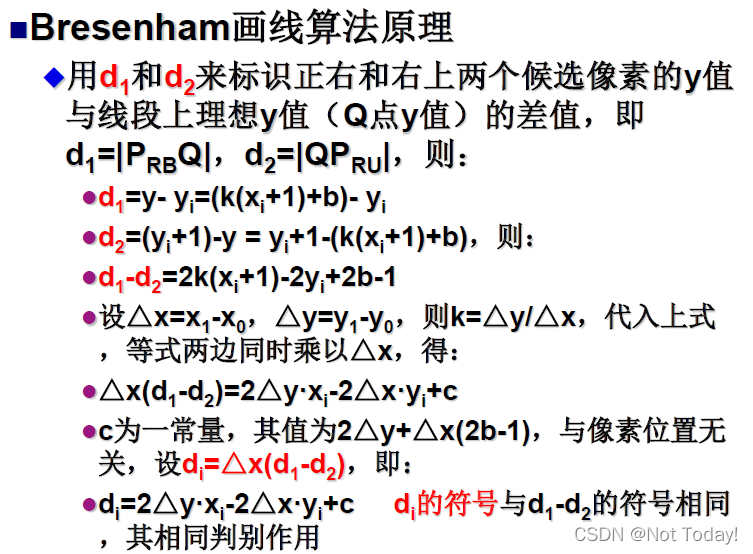
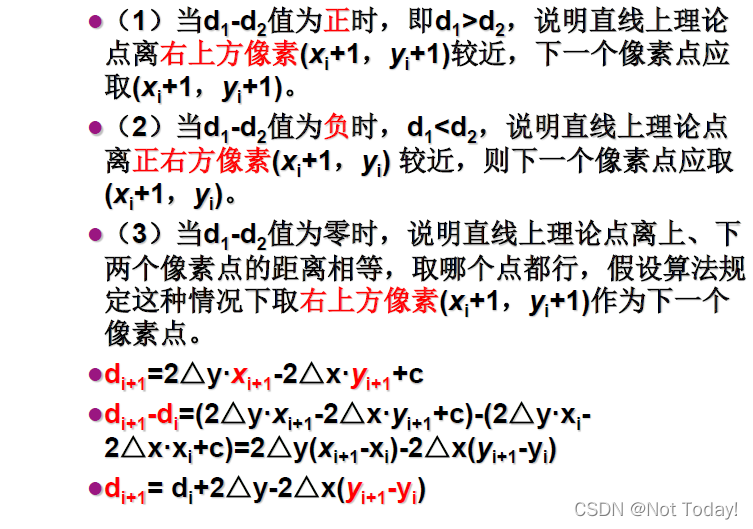
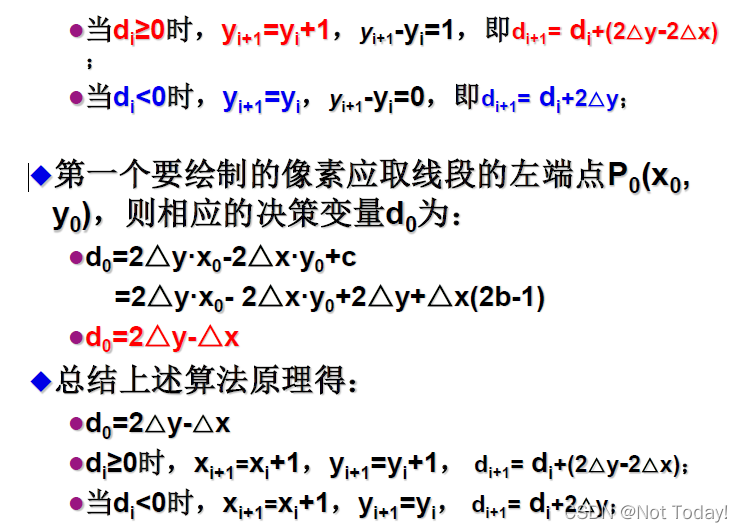
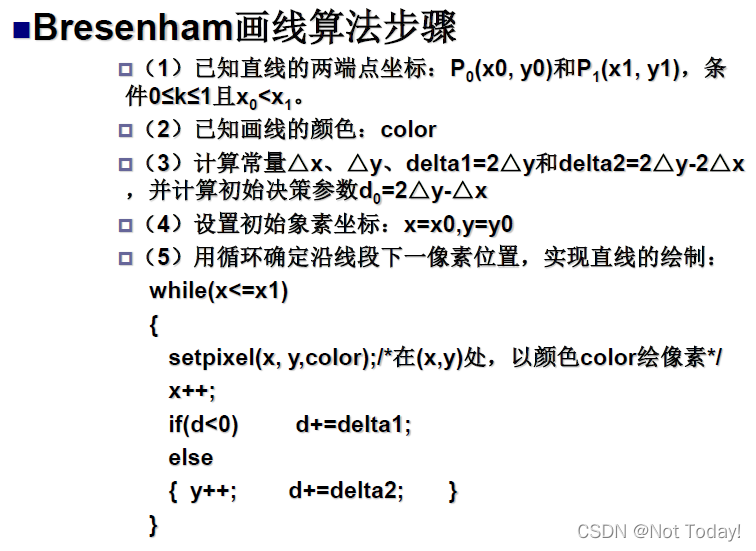
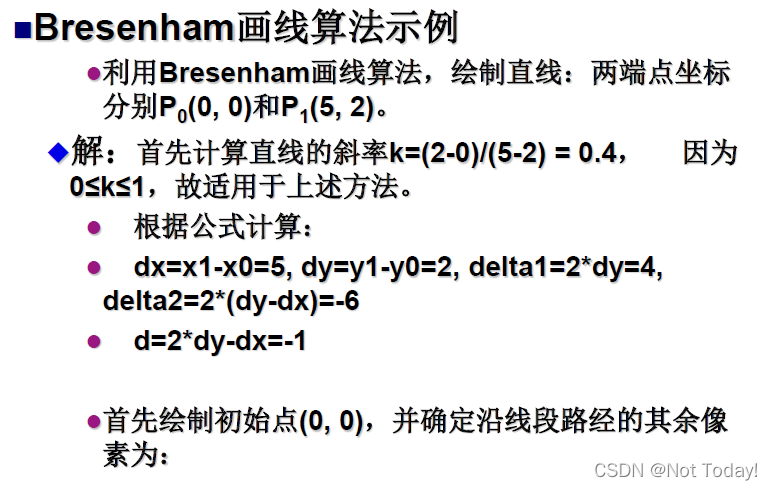
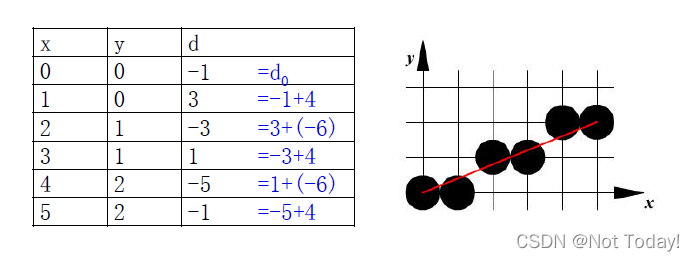
Bresenham畫線演算法
——通過在每列像素中選擇與理想直線最佳逼近的像素來完成掃描轉換
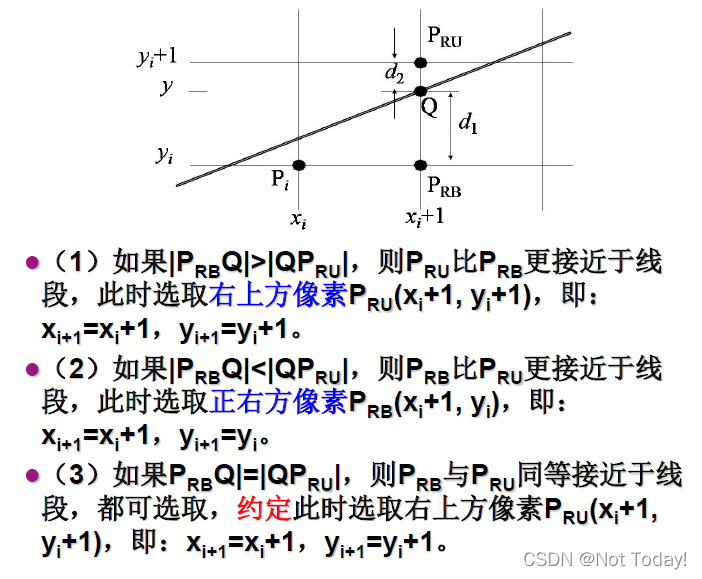
糾錯:倒數第2行的2△x·xi應改為2△x·yi
推導提示:xi+1-xi = 1
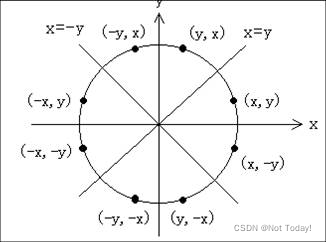
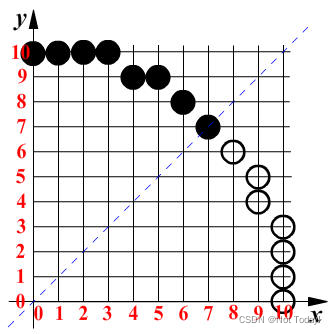
圓的八分對稱性
——圓心位于坐標原點的圓有四條對稱軸:x=0,y=0,x=y和x=-y
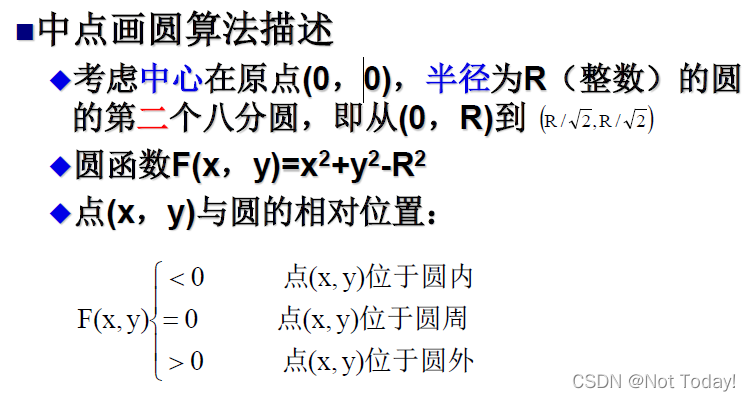
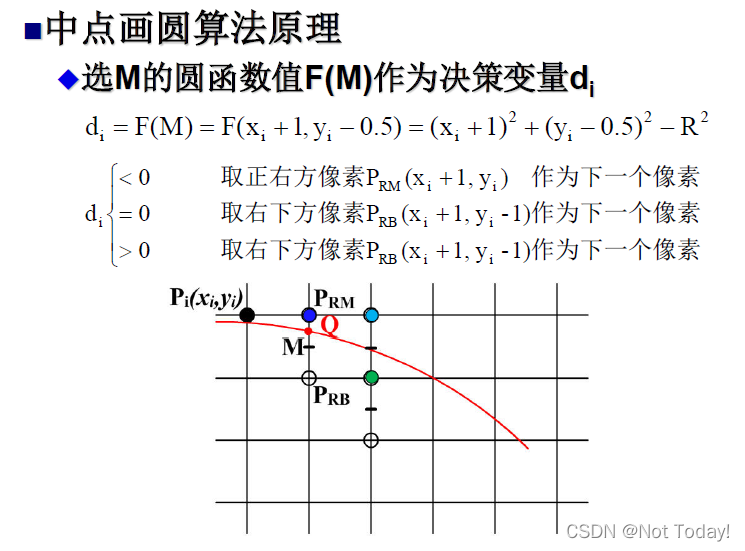
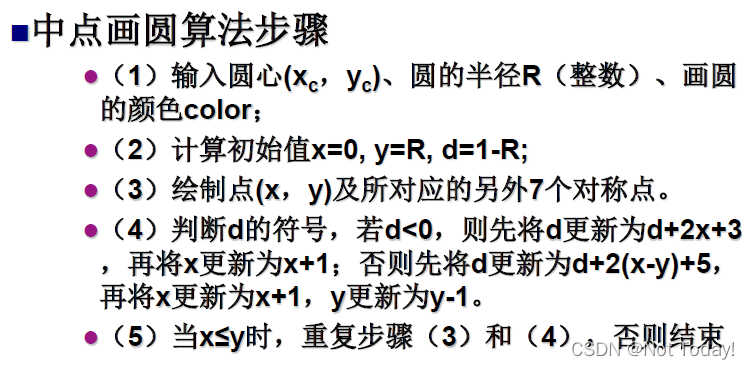
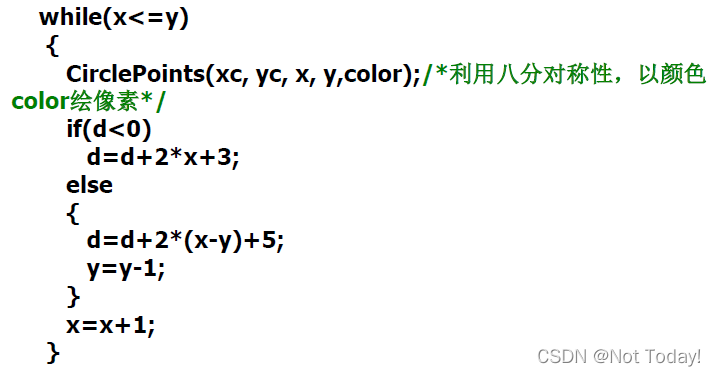
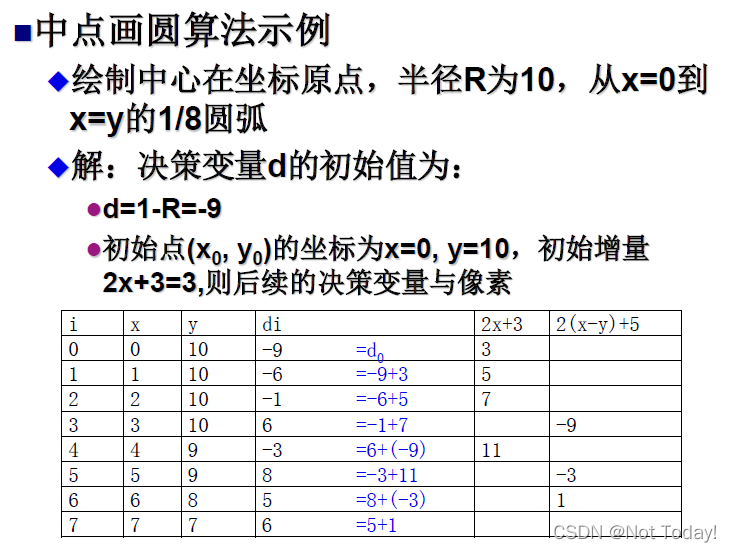
中點畫圓演算法
——在一個方向上單位步長步進,在另一個方向根據兩個候選像素的中點與理想圓的關系來確定選擇哪個像素

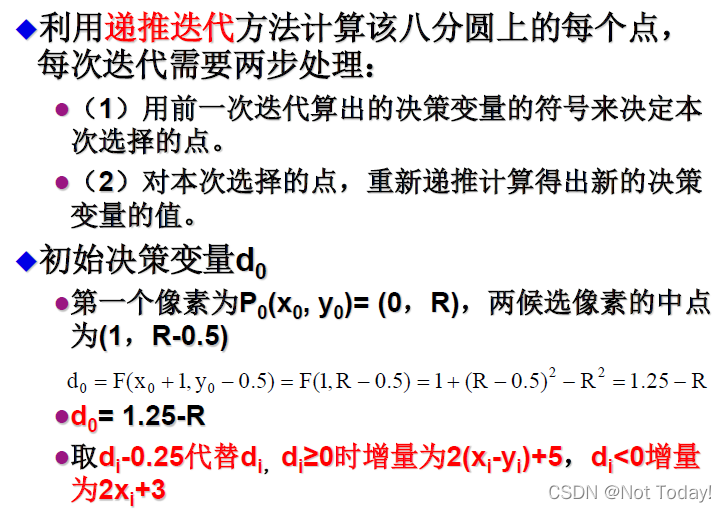
注意:用 (di-0.25) 代替 di 后,d0 = 1..25 - R - 0.25 = 1 - R
中點畫圓演算法原理可參考如下簡述:
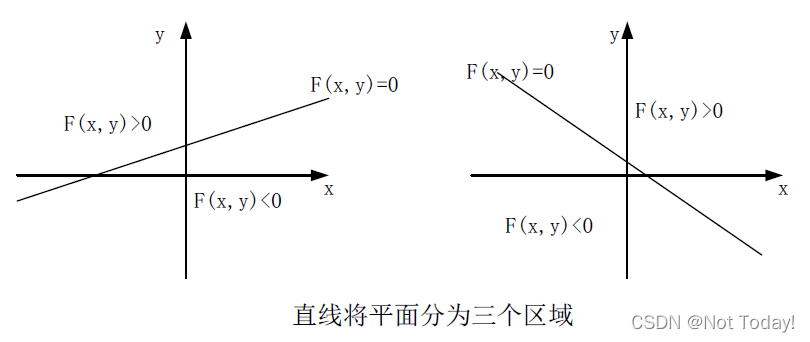
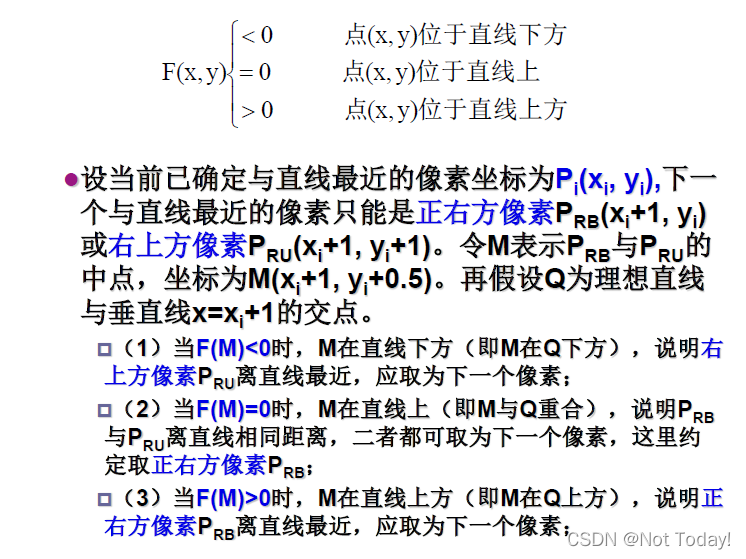
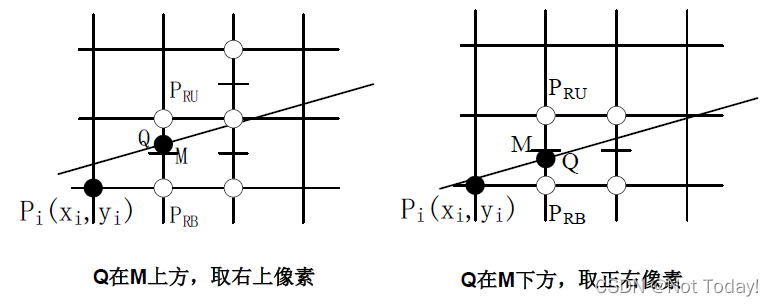
考慮中心在原點(0,0),半徑為R(整數)的圓的第二個八分圓,采用最大位移方向為步進方向,即x 方向每確定一個像素,y 方向上減1 或減0,假設當前已確定與圓弧最近的像素坐標為Pi(xi, yi),下一個與直線最近的像素只能是正右方像素PRM(xi+1, yi)或右下方像素PRB(xi+1, yi-1),令M 表示PRM 與PRB 的中點,坐標為M(xi+1,yi-0.5),再假設Q 為理想圓弧與垂直線x=xi+1 的交點,則對于圓函式F(x,y)=x2+y2-R2,M 對應函式值F(M),
(1)當F(M)<0 時,M 在圓弧內,說明正右方像素PRM 離圓弧更近,應取為下一個像素;
(2)當F(M)=0 時,M 在圓弧上(即與Q 重合),說明PRM與PRU離圓弧相同距離,二者都可取為下一個像素,
這里約定取右下方像素PRB;
(3)當F(M)>0 時,M 在圓弧外,說明右下方像素PRB 離直線最近,應取為下一個像素;
對于圓心(xc,yc),半徑為r 的圓,先計算圓心在原點,半徑為r 的圓周上的點,利用八分
之一對稱性及平移法可得對應八個點,
初始點(x0,y0)=(0,r)
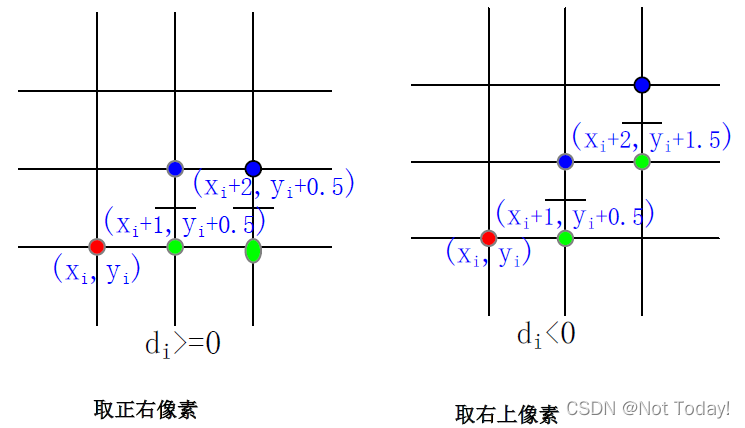
初始決策引數F0 =1-r
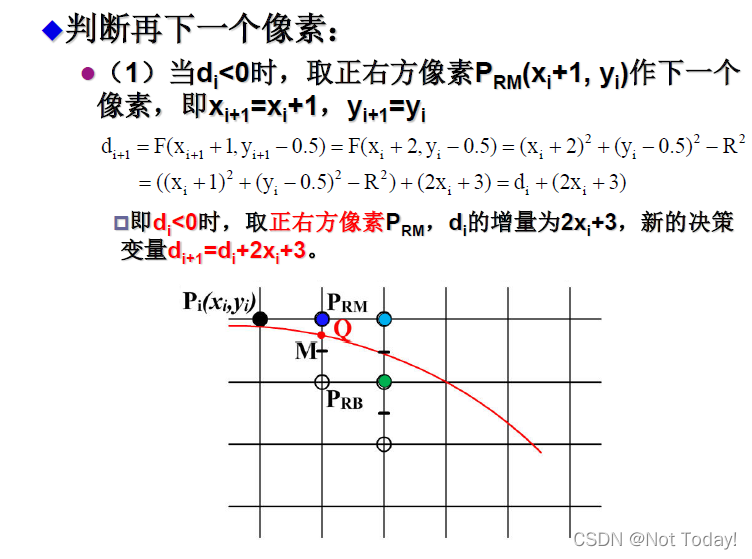
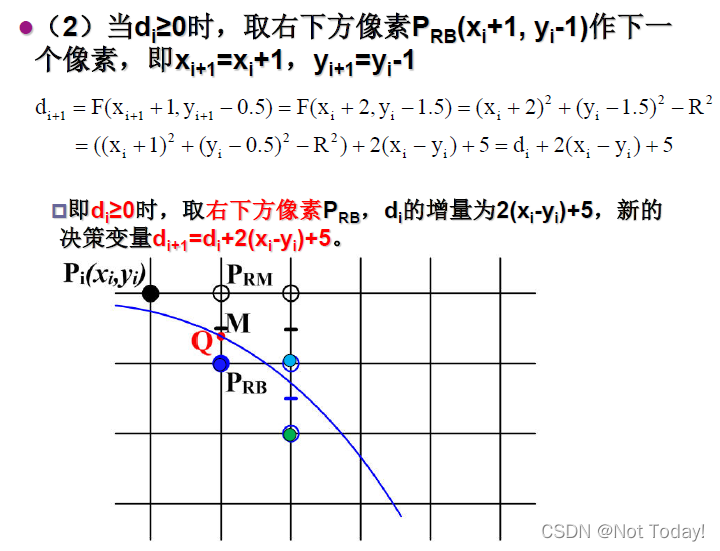
對于已確定的(xi,yi),若Fi <0,則(xi+1,yi+1)取為右方像素(xi+1,yi),且Fi+1 增量2xi+1+1 = 2xi+3;否則, Fi >=0 (xi+1,yi+1)取為右下方像素(xi+1,yi-1),且Fi+1 增量2xi+1-2yi+1+1 = 2(xi-yi)+5,其中2xi+1 =2xi+2,2yi+1 =2yi-2
對于計算出的像素位置(x,y),根據對稱性并且平移到圓心為(xc,yc)的圓的軌跡上,可得對應
的八個點:(xc+x,yc+y)(xc-x,yc+y)(xc+x,yc-y)(xc-x,yc-y)(xc+y,yc+x)(xc-y,yc+x)(xc+y,yc-x)(xc-y,yc-x),
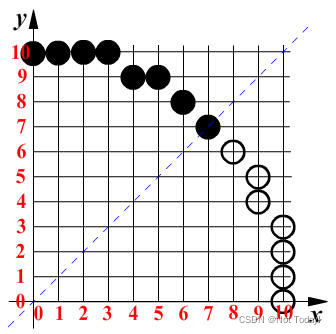
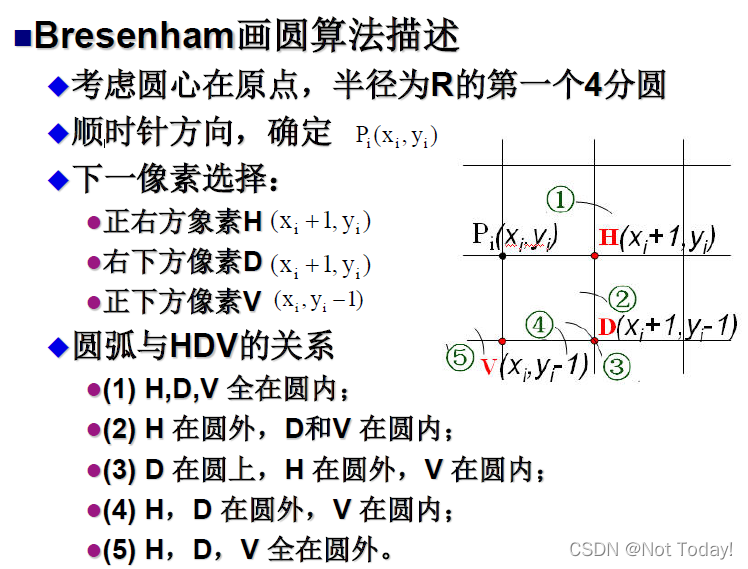
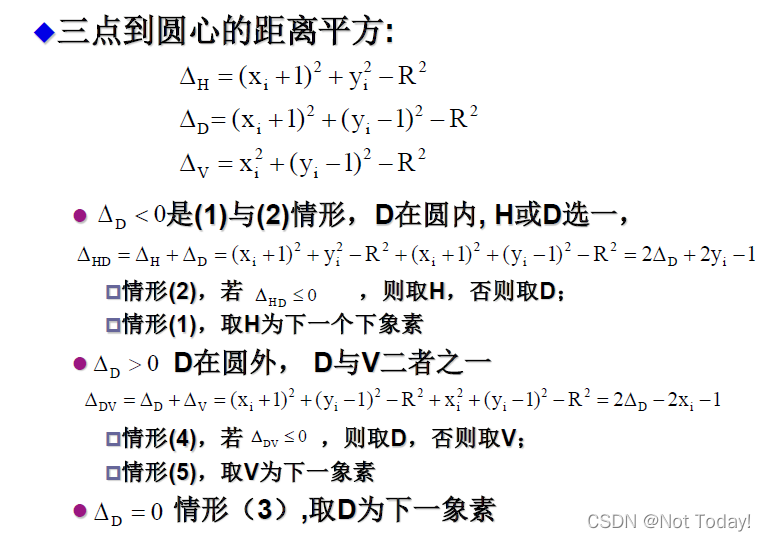
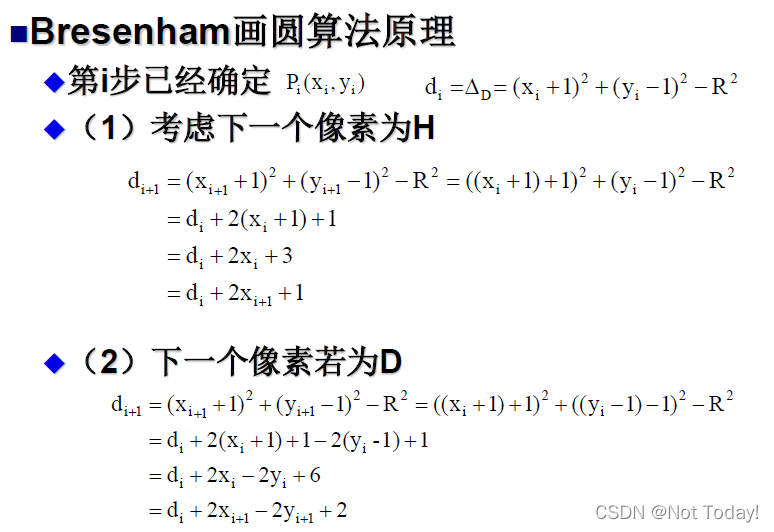
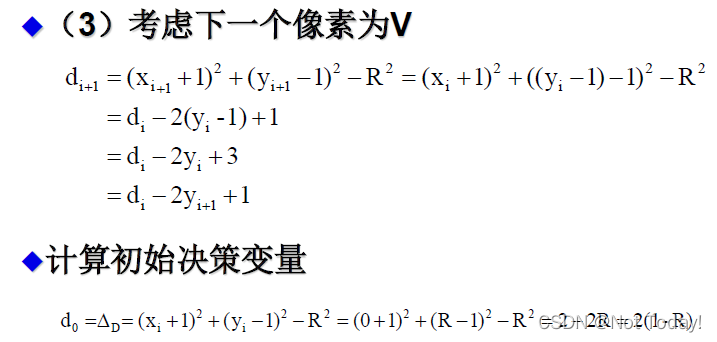
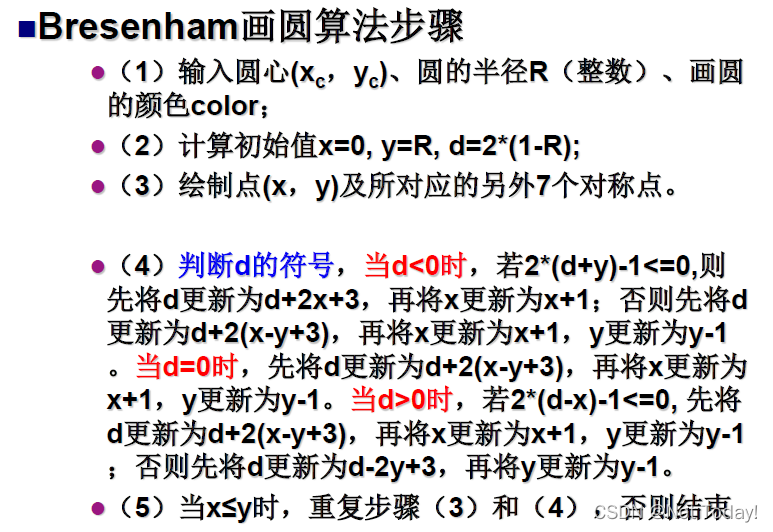
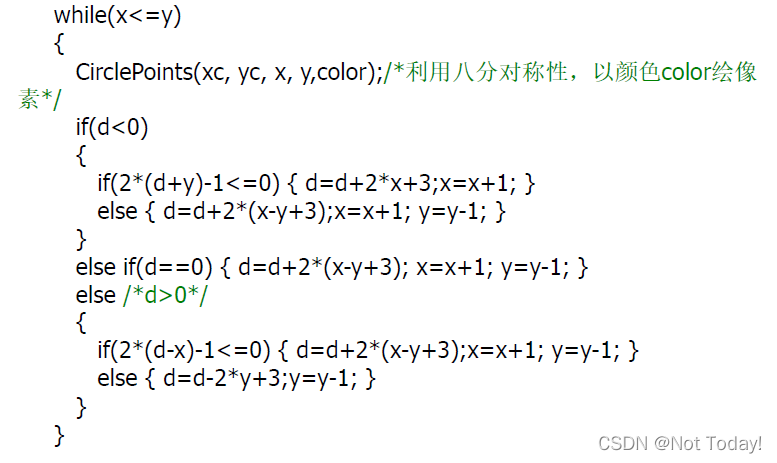
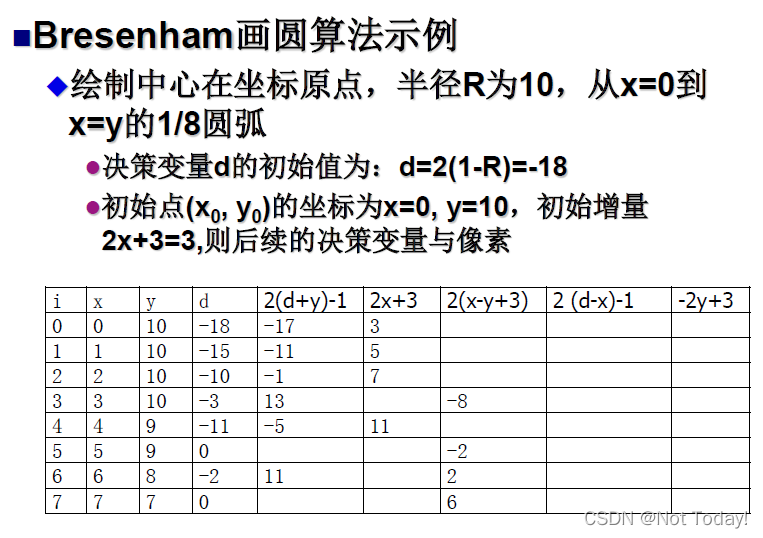
Bresenham畫圓演算法
——考慮圓心在原點,半徑為R的第一個4分圓
屬性控制——線型和線寬
線型處理
——線型包括實線、虛線和點線等,一般是通過設定沿線路徑實線段的長度和間距來達到實作各種線型的目的,
虛線,可通過在實線段之間插入一定長度的空白段來實作,
點線,可通過生成很短的劃線和等于或大于劃線大小的空白段來顯示
在掃描轉換演算法中可通過像素段方法來實作,即對于各種劃線、點線、點劃線樣式,畫執行緒式沿線路徑輸出一些連續像素段,在每兩個實線段之間有一個定長的空白中間段,實線段和中間空白段的長度可用像素模板(pixel mask)指定,像素模板是由數字0和1組成的串,
線寬處理
——設備能產生的最小直線寬度(通常認為是1個光點寬度、繪圖示的畫線寬度,或是1個像素的寬
度)作為基本寬度,
(1)線刷子處理線寬
直線斜率在[-1,1]之間時,把刷子置成與x軸垂直的方向
當直線斜率不在[-1,1]之間時,把刷子置成與x軸平行的方向
線刷子的優缺點:
1)實作簡單、效率高,
2)斜線與水平(或垂直)線不一樣粗,
3)當線寬為偶數個象素時,線的中心將偏移半個象素,
4)利用線刷子生成線的始末端總是水平或垂直的,不自然
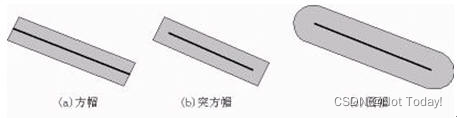
添加“線帽(line cap)”的方式來調整線端的形狀
線帽常有方帽、凸方帽和圓帽
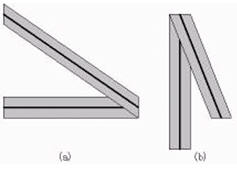
利用線刷子生成折線的考慮
斜角連接(miter join)通過延伸兩條線的外邊界直到它們相交;
圓連接(round join)通過用直徑等于線寬的圓弧邊界將兩線段連接而成;
斜切連接(bevel join)則通過用方帽和在兩線段相交處的三角形間隙中填充來生成,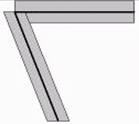

(2)方刷子處理線寬
方刷子是正方形像素矩陣,也稱像素模板,它通過把邊長為指定線寬的正方形的中心沿直線作平行移動
方刷子的特點:
1)方刷子繪制的線條(斜線)比用線刷子所繪制的線條要粗一些
2)方刷子繪制的斜線與水平(或垂直)線不一樣粗
3)方刷子繪制的線條自然地帶有一個“方線帽”
(3)利用區域填充法處理線寬
區域填充先算出線條各角點,再用直線把相鄰角點連接起來,最后呼叫多邊形填充演算法把得到的四邊形進行填充,即得到具有寬度的線條
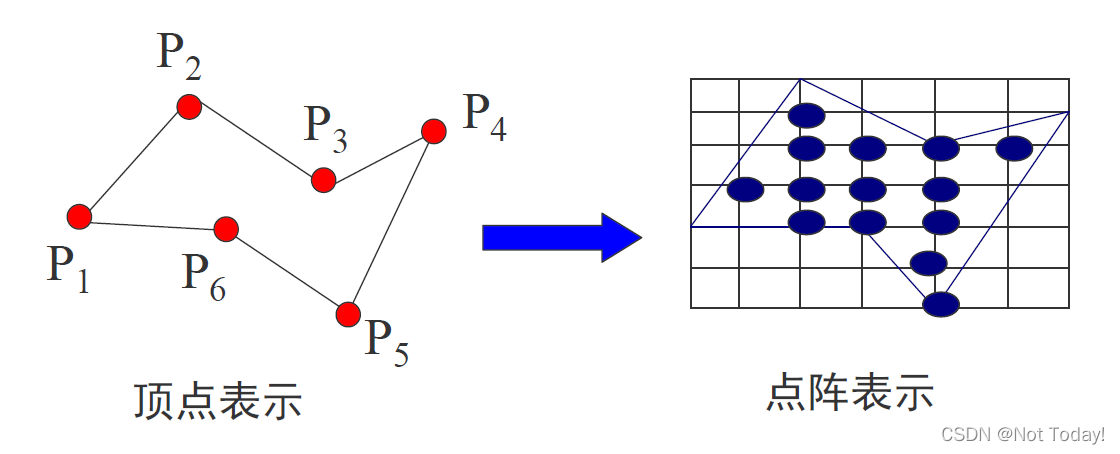
區域填充:區域的描述方法(頂點表示和點陣表示)
頂點表示
是用多邊形的頂點序列來表示區域
直觀、幾何意義強、占記憶體少,易于幾何轉換
沒有明確指出哪些像素在多邊形內
點陣表示
用位于多邊形內的像素集合來表示
丟失了幾何資訊,便于填充顯示
內點表示和邊界表示
內點表示
區域內所有像素具有同一顏色,區域邊界上的像素具有不同于區域內像素的顏色
邊界表示
區域邊界上所有像素具有同一顏色(可以是填充色),在區域以內的所有像素具有不同于邊界像素的顏色
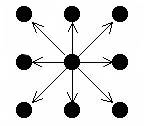
區域連通性
分為四連通區域和八連通區域
四連通區域
是指從區域內某一點出發,可通過上、下、左、右4個方向移動,在不越出區域的前提下到達區域內的任意像素,

八連通區域
是指從區域內某一點出發,可通過上、下、左、右、左上、右上、左下、右下8個方向移動,在不越出區域的前提下到達區域內的任意像素
掃描線多邊形填充演算法;多邊形填充的一般程序和重點要解決的問題
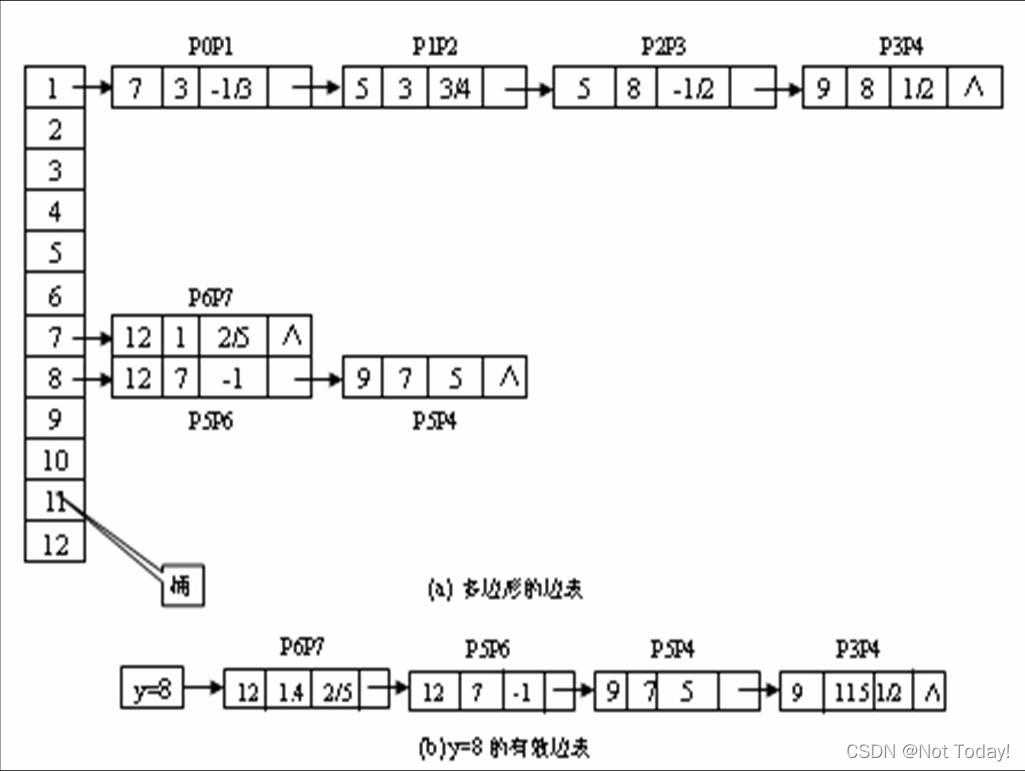
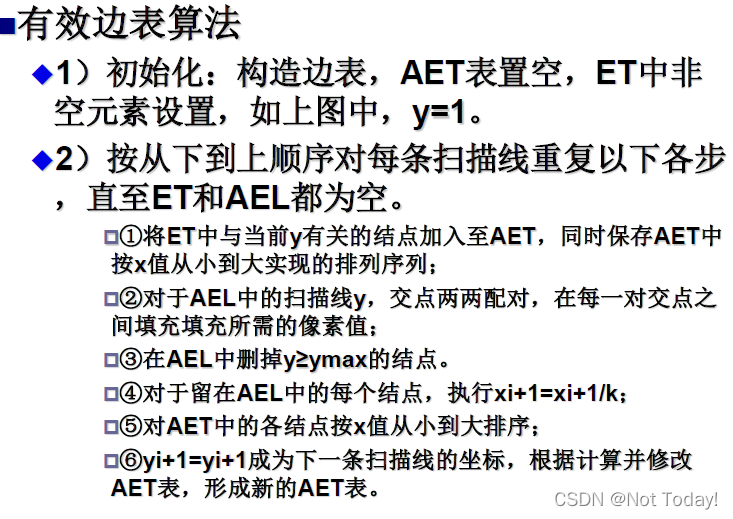
有效邊表掃描線填充演算法
有效邊表
與當前掃描線相交的邊稱為有效邊(Active Edge,AE),也稱為活性邊,并把它們按與掃描線交點的x坐標遞增的順序放在一個鏈表中,稱此鏈表為有效邊表(Active Edge Table,AET)或活性邊表
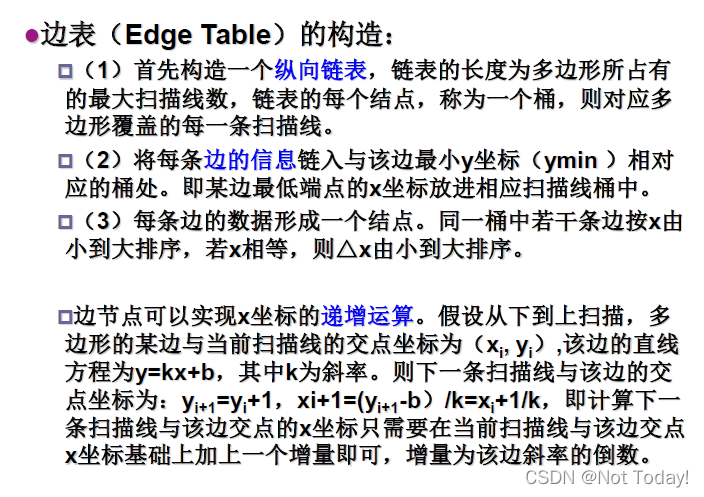
邊表(Edge Tabe,ET)
![]()
存放多邊形中除水平邊以外的所有邊的資訊
ymax:邊的上端點的y坐標;
x:在ET中表示邊的下端點的x坐標,在AET中表示邊與掃描線的交點的x坐標;
1/k:邊的斜率的倒數;
next:指向下一條邊的指標
種子填充演算法的原理方法
邊界表示的四連通區域種子填充演算法
基本思想:從多邊形內部任一點像素出發,按照“左上右下”的順序判斷相鄰像素,若不是邊
界像素且沒有被填充過,則對其填充,并重復上述程序,直到所有像素填充完畢,
(1)堆疊頂像素出堆疊;
(2)將出堆疊像素置成多邊形填充的顏色;
(3)按“左上右下”的順序檢查與出堆疊像素相鄰的四個像素,若其中某個像素不在邊界上且未置成多邊形色,則把該像素入堆疊,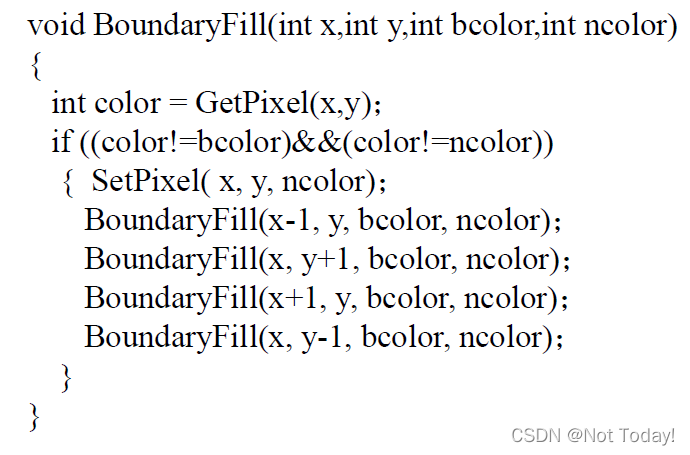
內點表示的四連通區域種子填充演算法
基本思想:從多邊形內部任一點像素出發,按照“左上右下”的順序判斷相鄰像素,如果是區域內的像素,則對其填充,并重復上述程序,直到所有像素填充完畢,常稱為漫水法
(1)堆疊頂像素出堆疊;
(2)將出堆疊像素置成多邊形填充的顏色;
(3)按“左上右下”的順序檢查與出堆疊像素相鄰的四個像素,若其中某個像素不在邊界上且未置成多邊形色,則把該像素入堆疊,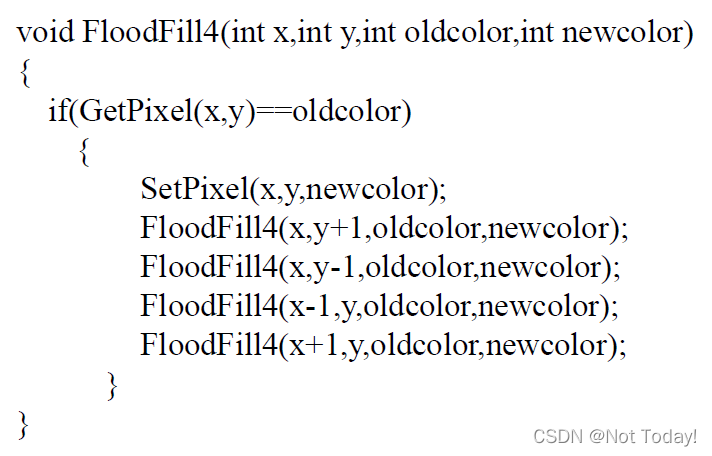
反走樣的概念
光柵圖形的走樣現象
階梯形走樣
狹小圖形遺失
細節失真
運動圖形閃爍
區域采樣的反走樣
螢屏直線段看成有寬度的線:
將每個像素亮度設定成與線條部分重疊的區域面積成正比,可以完成對直線的區域取樣,
根據直線的斜率k和直線的精確起點位置算出重疊區域的面積:

求相交區域的近似面積的離散計算方法:
(1)將螢屏象素分割成n個更小的子象素,
(2)計算中心落在直線段內的子象素的個數m
(3)m/n為線段與象素相交區域面積的近似值
簡單的區域取樣具有兩個特點:
一是直線段對一個象素亮度的貢獻與兩者重疊區域的面積成正比,從而和直線與象素中心點
的距離成正比,
二是相同面積的重疊區域物件素貢獻相同,而與這個重疊區域落在象素內的位置無關,這會
導致走樣現象,
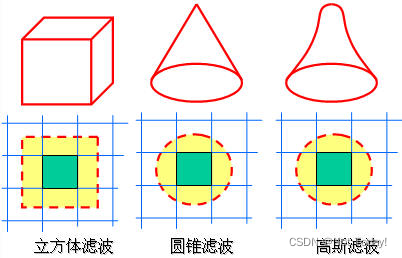
加權區域采樣的反走樣
加權模板的過取樣方法
連續的加權曲面(或濾波函式)覆寫象素
如切割所得到的三維物體的體積
第4章 自由曲線和曲面——掌握曲線曲面的概念
Bezier曲線、B樣條相關部分要知道這些樣條是什么樣條,有哪些樣條就行,性質、推導不用管
曲線曲面的表示要求
唯一性
幾何不變性
易于定界
統一性
易于實作光滑連接
幾何直觀
曲線曲面的表示
引數法表示:p = p(t) t ∈[0,1]
引數法表示的優點:
點動成線
通常總是能夠選取那些具有幾何不變性的引數曲線曲面表示形式,
用對引數求導來代替斜率,避免無窮大斜率
t∈[0,1] ,使其相應的幾何分量是有界的,
可對引數方程直接進行仿射和投影變換,
引數變化對各因變數的影響可以明顯地表示出來,
插值與逼近
采用模線樣板法表示和傳遞自由曲線曲面的形狀稱為樣條,
樣條曲線是指由多項式曲線段連接而成的曲線,在每段的邊界處滿足特定的連續條件,
樣條曲面則可以用兩組正交樣條曲線來描述,
曲線曲面的擬合:當用一組型值點來指定曲線曲面的形狀時,形狀完全通過給定的型值點列,
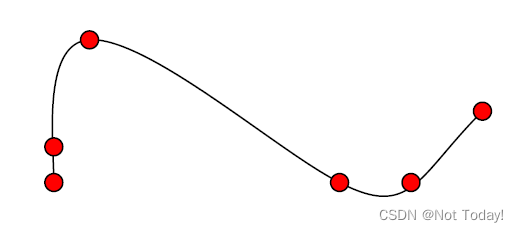
曲線曲面的逼近:當用一組控制點來指定曲線曲面的形狀時,求出的形狀不必通過控制點列,
求給定型值點之間曲線上的點稱為曲線的插值,
將連接有一定次序控制點的直線序列稱為控制多邊形或特征多邊形,
連續性條件
假定引數曲線段pi以引數形式進行描述:

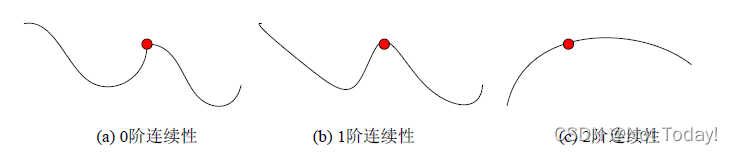
引數連續性
0階引數連續性,記作C0連續性,是指曲線的幾何位置連接,即
1階引數連續性
記作C1連續性,指代表兩個相鄰曲線段的方程在相交點處有相同的一階導數:
2階引數連續性
記作C2連續性,指兩個相鄰曲線段的方程在相交點處具有相同的一階和二階導數,
幾何連續性
0階幾何連續性
記作G0連續性,與0階引數連續性的定義相同,滿足:
1階幾何連續性
記作G1連續性,指一階導數在相鄰段的交點處成比例
2階幾何連續性
記作G2連續性,指相鄰曲線段在交點處其一階和二階導數均成比例,
樣條描述
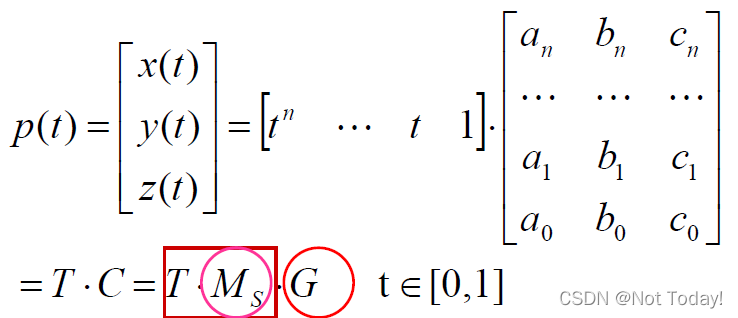
T:冪次矩陣,C:系數矩陣,G:幾何約束矩陣,M:基矩陣
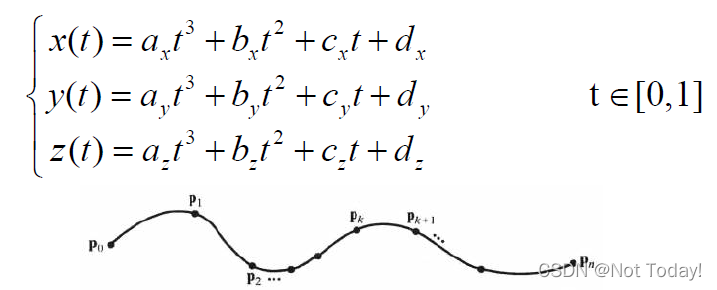
三次樣條
給定n+1個點,可得到通過每個點的分段三次多項式曲線:
自然三次樣條
定義:給定n+1個型值點,現通過這些點列構造一條自然三次引數樣條曲線,要求在所有曲線段的公共連接處均具有位置、一階和二階導數的連續性,即自然三次樣條具有C2連續性,
還需要兩個附加條件才能解出方程組,
特點
只適用于型值點分布比較均勻的場合
· 不能“區域控制”
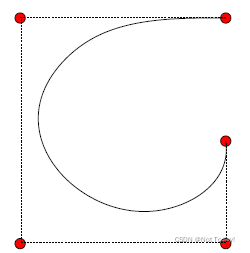
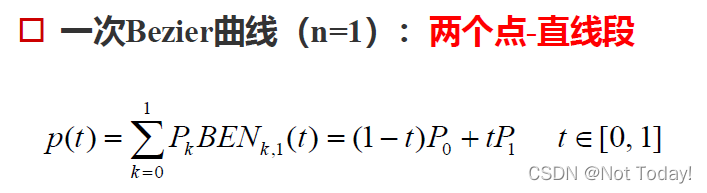
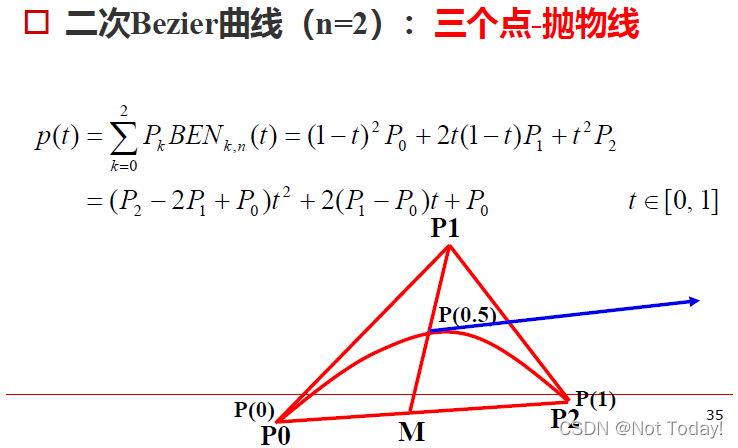
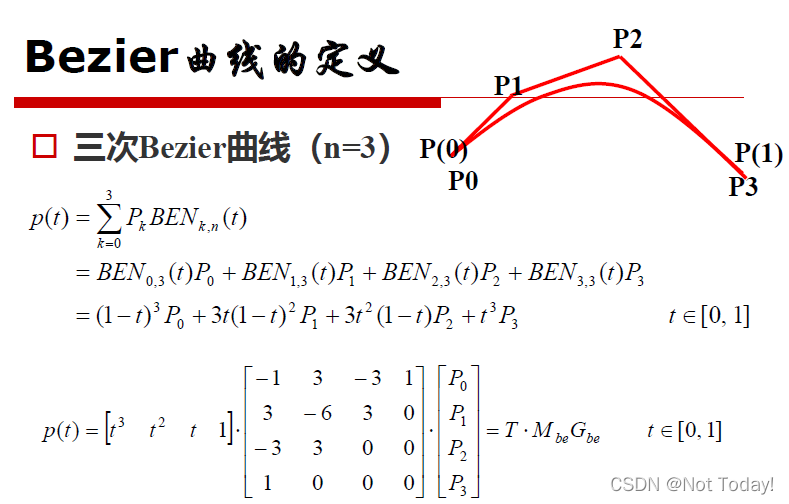
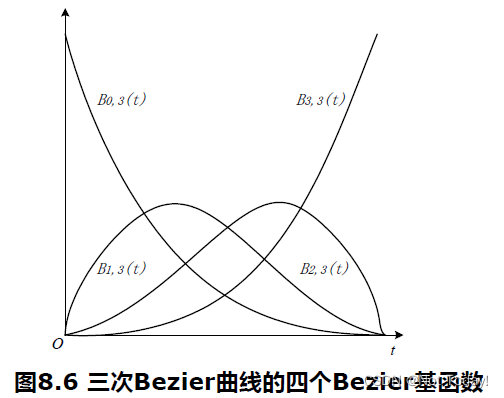
Bezier曲線
定義:
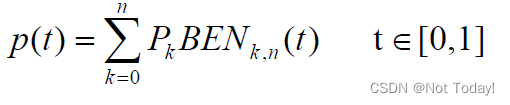
Bernstein基函式具有如下形式:
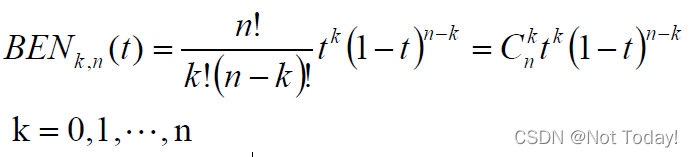
注意:![]()
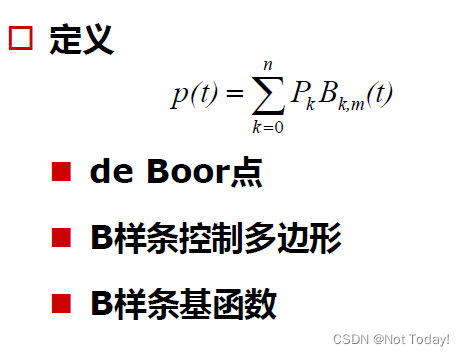
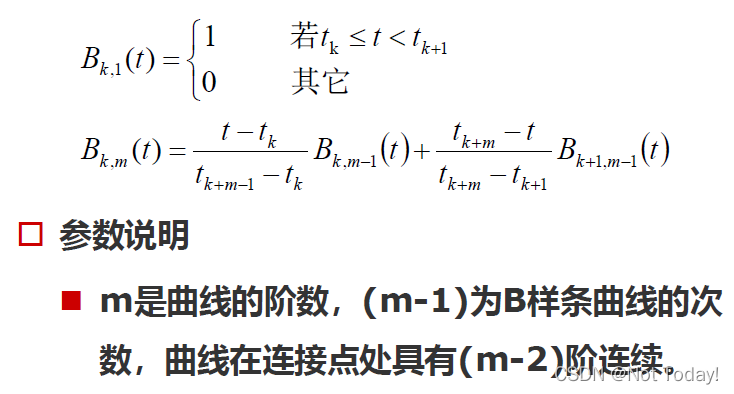
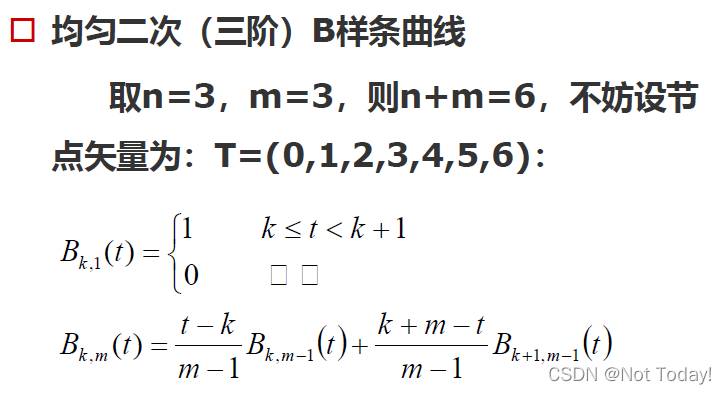
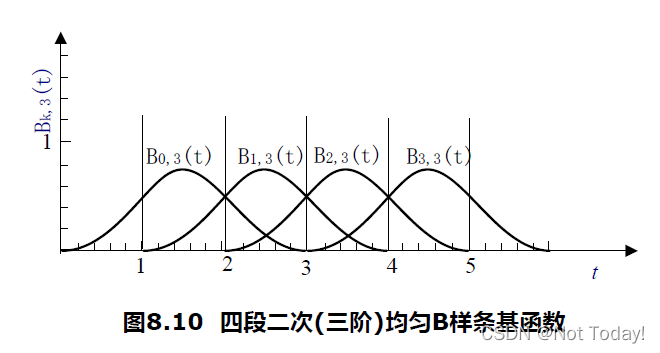
B樣條曲線曲面
第5章 圖形變換與裁剪——重點
一定注意列向量形式的表達和行向量形式的表達,會影響整道題
參考自己的作業3、作業4進行復習即可,
第6章 物體幾何造型基礎
可參考自己的作業五復習,
線框模型、表面模型和物體模型
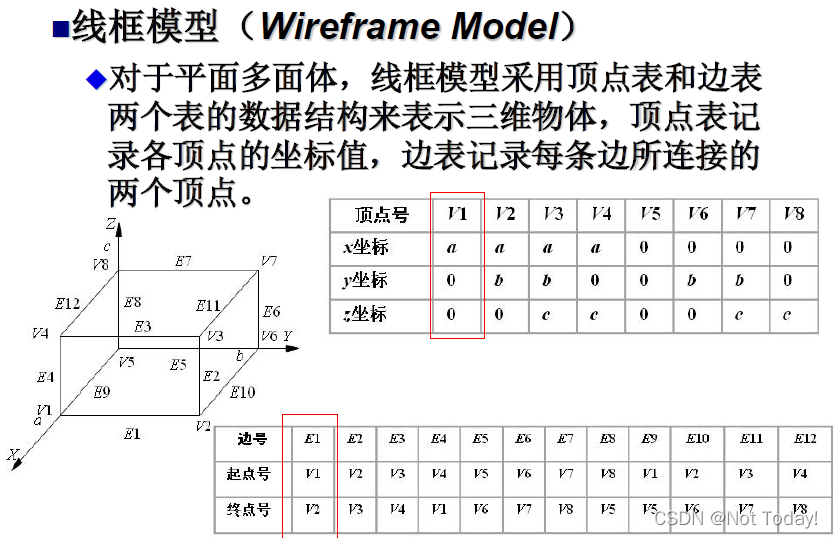
線框模型(Wireframe Model)
對于平面多面體,線框模型采用頂點表和邊表兩個表的資料結構來表示三維物體,頂點表記錄各頂點的坐標值,邊表記錄每條邊所連接的兩個頂點,
線框模型的優點
可以產生任意視圖,視圖間能保持正確的投影關系
能生成任意視點或視向的透視圖及軸測圖
操作簡便,在CPU時間及存盤方面開銷低
線框模型的缺點
二義性,容易構造出無效形體
不能消除隱藏線,不能作任意剖切,不能計算物性,不能進行兩個面的求交,無法生成數控加工刀具軌跡,不能自動劃分有限元網格,不能檢查物體間碰撞、干涉等
表面模型(Surface Model)

表面模型的優點
能實作以下功能:消隱、著色、表面積計算、二曲面求交、數控刀具軌跡生成、有限元網格劃分等,
擅長于構造復雜的曲面物體,如模具、汽車、飛機等表面,
表面模型的缺點
有時會產生對物體二義性理解,
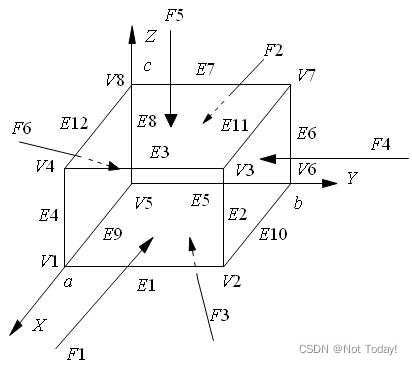
物體模型
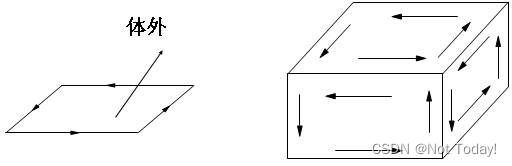
確定了表面的哪一側存在物體
有向邊的右手法則確定所在面的外法線的方向

物體模型的優點:
消隱、剖切、有限元網格劃分、直到NC刀具軌跡生成都能順利地實作,
著色、光照及紋理處理等
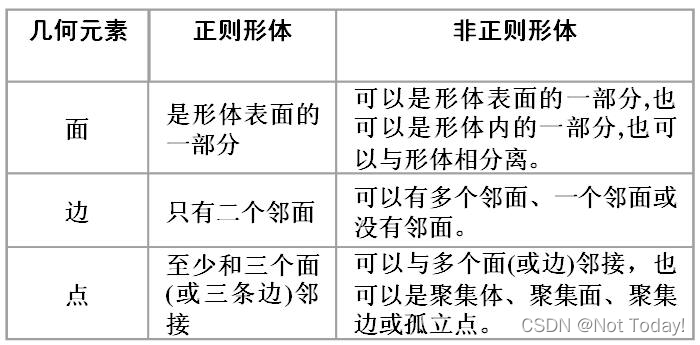
正則的結合運算、歐拉公式
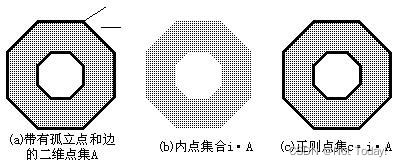
點集的正則運算
r?A=c?i?A
i為取內點運算,c取閉包運算,A為一個點集,那么,i?A即為A的全體內點組成的集合,稱為A的內部,它是一個開集,c?i?A為A的內部閉包,是i?A與其邊界點的、并集,它本身是一個閉集,
正則運算即為:先對物體取內點,再取閉包的運算
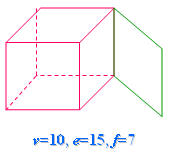
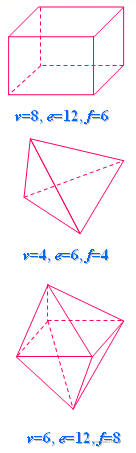
歐拉公式
v-e+f=2
v,e,f分別是多面體的頂點數、邊數和面數
簡單多面體的必要條件
不是充分條件
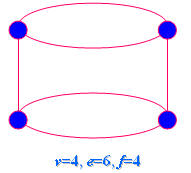
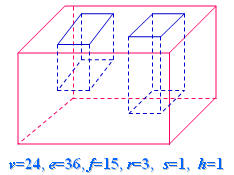
廣義歐拉公式
v-e+f-r=2(s-h)
r為多面體表面上孔的個數;h為貫穿多面體的孔洞的個數;s為相互分離的多面體數
多面體否為物體的必要條件
物體的幾種表示法——原理、方法和優缺點、
物體的分解表示
也稱為空間分割表示,是將形體按某種規則分解為小的、更易于描述的部分,每一小部分又
可分為更小的部分,這種分解程序直至每一小部分都能夠直接描述為止,
常用的常用的空間分割表示方法有三種:空間位置列舉表示、八叉樹表示、單元分解表示,
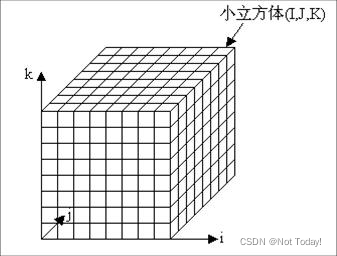
空間位置列舉表示
選擇一個包含物體的立方體作為考慮的空間;將立方體劃分為均勻的小立方體,小立方體的
邊長為Δ;建立三維陣列C[I][J][K],使得陣列中的每一元素C[i][j][k]與左下角點坐標為(i·Δ,j·Δ,k·Δ)的小立方體對應
形體占有的空間,存盤單元中記為1;其余空間記為0
優點是簡單,可以表示任何物體;容易實作物體間的交、并、差集合計算;容易計算物體的
整體性質,如體積等,缺點是物體的非精確表示;占用的存盤量太大
物體的邊界面沒有顯式的決議運算式,不適于圖形顯示;對物體進行幾何變換困難,不便于
運算等,實際上很少采用,
八叉樹表示
對空間進行自適應劃分
分解成八個子立方體
滿(該立方體充滿形體)或為空(沒有形體在其中),則該子立方體可停止分解;否則,需要對該立方體作進一步分解,再一分為八個子立方體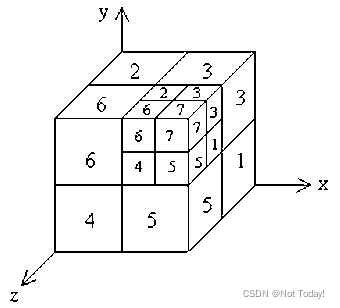
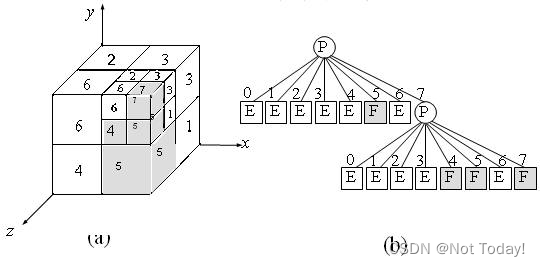
八叉樹建立程序
1)八叉樹的根節點對應整個物體空間;
2)如果它完全被物體占據,將該節點標記為F(Full),演算法結束;
3)如果它內部沒有物體,將該節點標記為E(Empty),演算法結束;
4)如果它被物體部分占據,將該節點標記為P(Partial),并將它分割成8個子立方體,對每一個子立方體進行同樣的處理,
八叉樹表示法優點
(1)可以表示任何物體,資料結構簡單,
(2)簡化了形體的集合運算,對形體執行交、并、差運算時,只需同時遍歷參加集合運算的兩形體相應的八叉樹,無需進行復雜的求交運算,
(3)簡化了隱藏線(或面)的消除,因為在八叉樹表示中,形體上各元素已按空間位置排成了一定的順序,
(4)容易計算物體的整體性質,如體積等,
(5)較空間位置列舉表示占用的存貯空間少,
(6)分析演算法適合于并行處理,
八叉樹表示的缺點
(1)雖然較空間位置列舉表示占用的存貯空間少,但仍然相對較多;
(2)是物體的非精確表示,只能近似表示形體;
(3)沒有邊界資訊,不易獲取形體的邊界資訊,不適于圖形顯示;
(4)對物體進行幾何變換困難等,
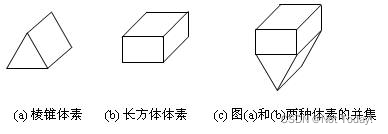
單元分解表示
以不同型別的基本體素(而不是單一的立方體)通過“粘合”運算來構造新的物體
單元分解表示的優點:
表示簡單,基本體素可以按需選擇,表示范圍較廣,可以精確表示物體,容易實作幾何變換,
單元分解表示的缺點:
同一物體可具有多種表示形式,表示不具有唯一性,不過都無二義性,物體的有效性難以保證,空間位置列舉表示法與八叉樹表示法中的物體有效性是自動得到保證,
物體的構造表示
是按照生成程序來定義形體的方法,構造表示通常有掃描表示、構造物體幾何表示和特征表
示三種,
掃描表示
是基于一個基體(一般是一個封閉的平面輪廓)沿某一路徑運動而產生形體
兩個分量:被運動的基體,基體運動的路徑
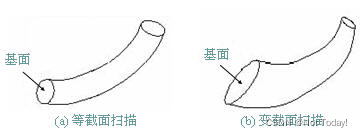
如果是變截面的掃描,還要給出截面的變化規律,
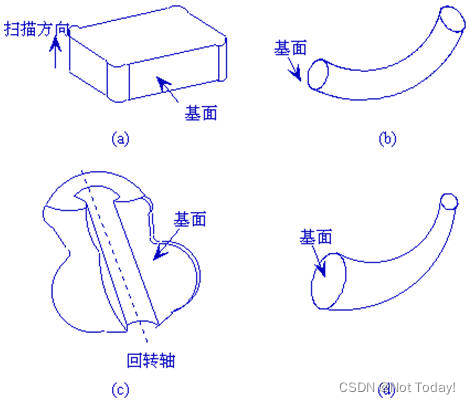
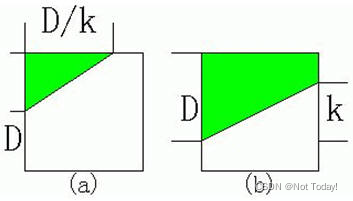
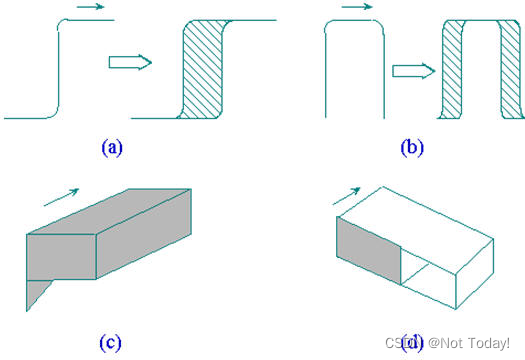
平移sweep:
一個二維區域沿著一個矢量方向(線性路徑)推移
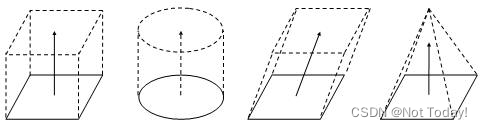
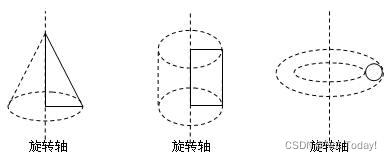
旋轉sweep
將一個二維區域繞旋轉軸旋轉一特定角度(如一周)
廣義sweep
將任意剖面沿著任意軌跡掃描指定的距離,掃描路徑可以用曲線函式來描述,并且可以沿掃描路徑變化剖面的形狀和大小,或者當移動該形狀通過某空間時變化剖面相對于掃描路徑的方向
掃描表示的優點:
表示簡單、直觀,適合做圖形輸入手段,
掃描表示的缺點:
對物體作幾何變換困難,不能直接獲取形體的邊界資訊,表示形體的覆寫域非常有限,另外也可能出現維數不一致的問題,
構造物體幾何表示
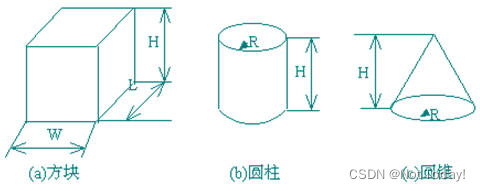
通過對體素定義運算而得到新的形體的一種表示方法,體素可以是立方體、圓柱、圓錐等,也可以是半空間,其運算為變換或正則集合運算并、交、差,
CSG表示可看成是一棵有序的二叉樹-CSG樹
終端節點(葉子節點)或是體素、或是形體變換引數
非終端結點(中間節點)或是正則的集合運算,或是變換(平移和/或旋轉)操作
根節點表示了最終的形體,這里的體素和中間形體都是合法邊界的形體
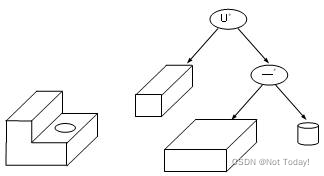
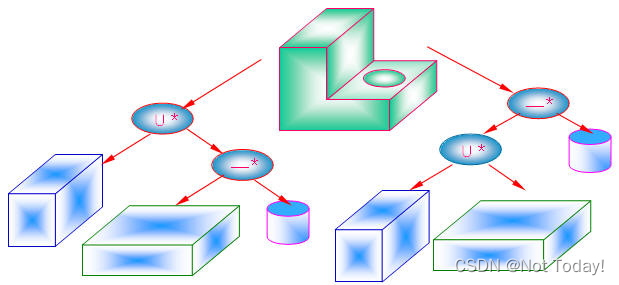
CSG樹是無二義性的,但不是唯一的
CSG表示的優點:
1)資料結構比較簡單、直觀,無二義性,資料量比較小,內部資料的管理比較容易;
2)CSG表示可方便地轉換成邊界(Brep)表示;
3)CSG方法表示的形體的形狀,比較容易修改,可用作圖形輸入的一種手段;
4)容易計算物體的整體性質(如重心、體積等);
5)物體的有效性自動得到保證,
CSG表示的缺點:
1)對形體的表示受體素的種類和對體素操作的種類的限制,也就是說,CSG方法表示形體的覆寫域有較大的局限性,
2)對形體的區域操作不易實作,例如,不能對基本體素的交線倒圓角;
3)由于形體的邊界幾何元素(點、邊、面)是隱含地表示在CSG中,故顯示與繪制CSG表示的形體需要較長的時間,求交計算麻煩;
4)表示物體的CSG樹不唯一,
特征表示
特征的形狀常用若干個引數來定義
用戶輸入形體非常方便
缺點:用戶不能根據特征引數直接獲取特征的幾何元素資訊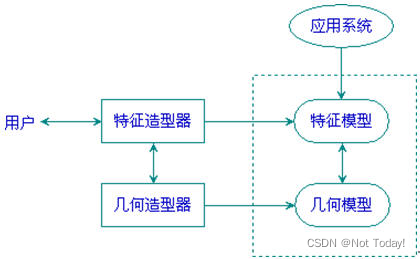
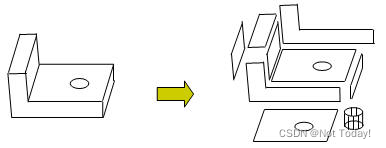
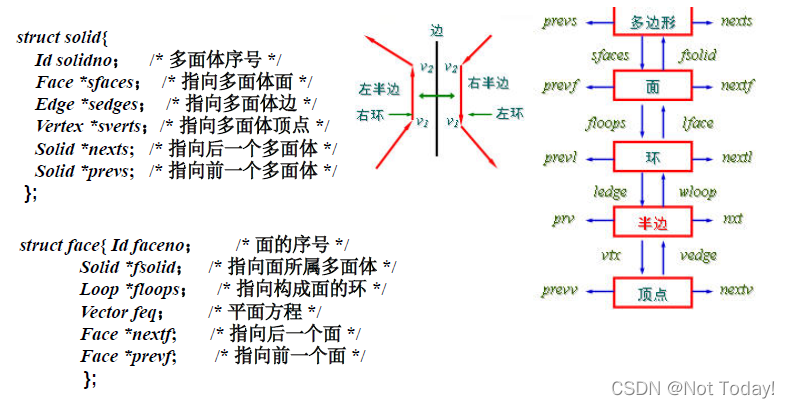
物體的邊界表示
物體的邊界通常是由面的并集來表示
描述幾何資訊(Geometry)和拓撲資訊(Topology)兩個方面
邊界表示按照體-面-環-邊-點的層次
邊界表示的資料結構
頂點坐標、頂點索引
拓撲資訊
v→{v},v→{e},v→{f},e→{v},e→{e},e→{f},f→{v},f→{e},f→{f}
半邊資料結構
以邊為核心
將一條邊表示成拓撲意義上相反的兩條“半邊”
各種表示方法的比較
精確性
指一種表示方法是否具有精確性是指它能否精確地表示物體,
特征表示能夠精確表示一個物體,構造物體幾何表示能否精確表示物體依賴于它采用的基本體素,如果基本體素足夠豐富(如具有曲面邊界),則它一般能精確描述較大范圍內的物體,對于邊界表示,如果以平面多面體表示物體,則它僅是一種近似表示,如果允許曲面邊界,則它也可以精確表示物體,推移表示的情況類似,空間分割表示法只能近似地表示一個物體,
封閉性
對一種表示方法來說,如果其表示域內的物體經過某種運算(如正則集合運算、幾何變換)后,結果物體仍落在表示域之內,則稱這種表示方法對該運算是封閉的(具封閉性),
特征表示的物體之間不能進行集合運算;
不封閉的表示方法為:簡單推移表示(平移與旋轉);單元分解表示,邊界表示雖然對正則集合運算不封閉(導致表面為非二維流形的物體產生),可以附加約束條件加以避免,
封閉的表示方法為:空間位置列舉表示;八叉樹表示;CSG表示,
有效性
在表示法應具備的各種性質中,有效性是較為重要的而又難以驗證的,
邊界表示(包括推移表示)物體的有效性最難以檢驗,其中不僅頂點、邊、面的拓撲關系可能不一致,而且相互之間可能相交,特征表示的物體的有效性自動得到保證;其它表示方法的有效性驗證也較為簡單,
簡潔性
物體的表示應該是簡潔的,目的是節約存盤空間,
空間分割表示占用大量的空間;
特征表示、推移表示、CSG表示較為簡潔;
邊界表示介于其間,值得注意的是:簡潔性不應該被獨立地考察,例如,在邊界表示的半邊資料結構中,雖然保存了大量的資訊,需要較多的存盤空間,但它同時給多種操作帶來方便,事實上,常用保存冗余資訊換取更快的系統回應速度,
第7章 自然景物模擬與分形技術——掌味訓本概念
了解自然景物或非均勻非規則形體建模當中有哪些方法
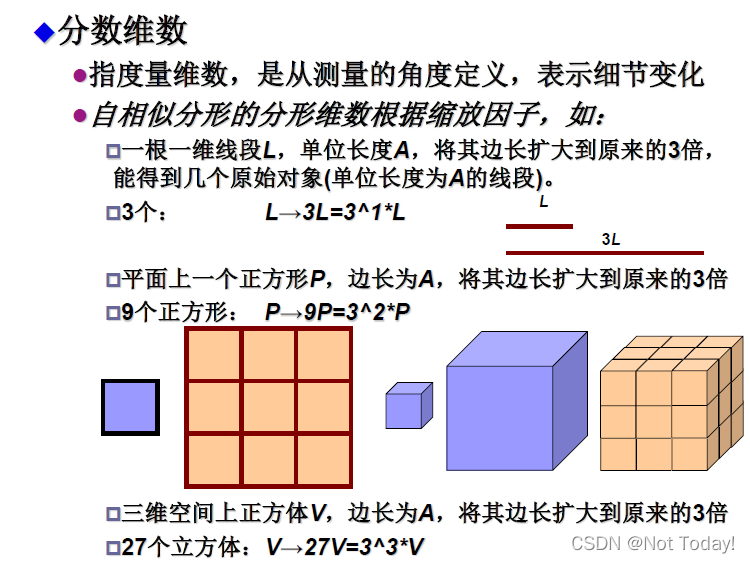
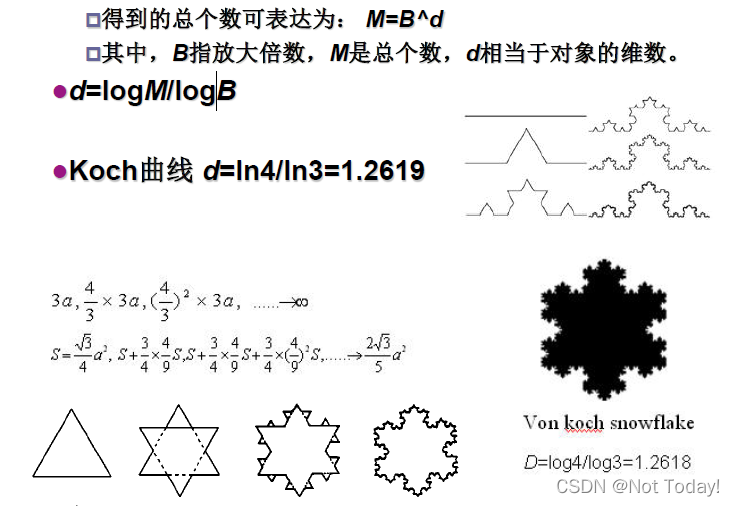
分形幾何
——使用程序對具有不規則幾何形態的物體(如自然景物)建模
分行幾何方法
(1)基于程序,表示不規則、粗糙的形狀,
(2)分形物件:整體與區域的自相似性,無限細節
基于物理的建模方法
主要思想是將物體的物理特性加入到其幾何模型中,通過數值計算對其進行仿真,物體的行
為由仿真程序自動確定
物體的物理特性包括:
1)物體所具有的一組物理參量
2)不同參量之間的關系
3)物理參量與物體幾何特性及運動狀態之間的關系,
4)不同物體的物理參量之間的關系,
要掌握粒子系統的基本概念和構成,分形的概念和一般的方法
粒子系統(particle systems)
是一個隨機模型,用大量的粒子圖元來描述景物,粒子會隨時間推移發生位置和形態變化
模擬動態自然景物的程序:
1)生成新的粒子,分別賦予不同的屬性以及生命周期;
2)將新粒子加到系統中;
3)刪去系統中老的已經死亡(超過生命周期)的粒子;
4)根據粒子的動態屬性,按適當的運動模型或規則,對余下的存活粒子的運動進行控制(Transformation);粒子運動的模擬方式:隨機程序模擬、運動路徑模擬、力學模擬;
5)根據粒子屬性繪制當前系統中存活的所有粒子,
第8章 真實感圖形顯示
沒講整體光照模型、紋理、光線跟蹤技術,主要講了光照模型等一些內容
取景變換
場景坐標系
場景的區域坐標系
完成物體的造型
場景的世界坐標系(整體坐標系)
放入待繪制的場景,定義物體之間的相互位置
如果物體被設定了影片
影片系統將提供一個隨時間變化的變換矩陣
逐幀把物體變換到世界坐標系中
觀察坐標系
也稱攝像機坐標系,或者視點坐標系
完成取景變換所需建立的第一個坐標系
建立觀察坐標系的步驟
(1)確定觀察參考點,即視點位置
可以設在任何位置
通常選在靠近或在物體的表面
將視點位置取為視點坐標系的原點
(2)確定觀察方向,即視線方向
一般取深度坐標軸,即ze軸的正向
為簡便起見,視線方向設為總是指向場景坐標系的原點
(3)確定觀察平面,即視平面位置
一般取過視點且垂直于視線方向的平面,即xeye平面
場景坐標系
一般取右手坐標系
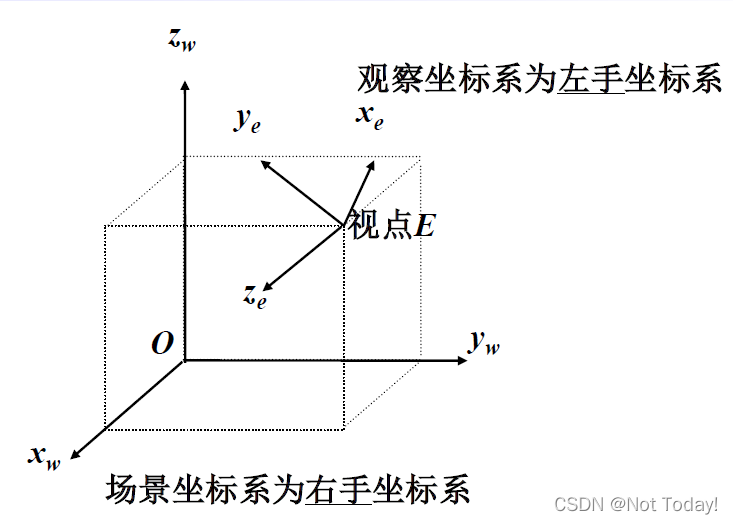
觀察坐標系
通常取左手坐標系
符合人們的觀察習慣
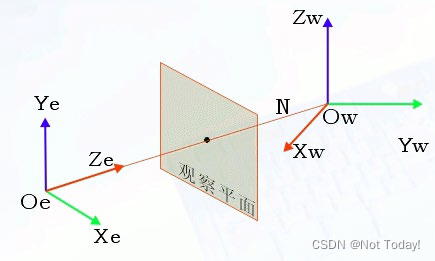
將物體投影到觀察平面之前,必須將場景坐標系中的點轉換到觀察坐標系中,這一程序稱為取景變換,也稱視向變換,包括平移和旋轉的一系列幾何變換的級聯
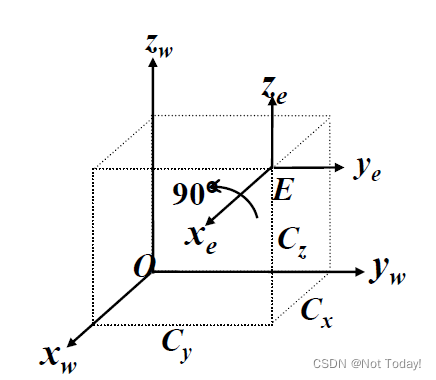
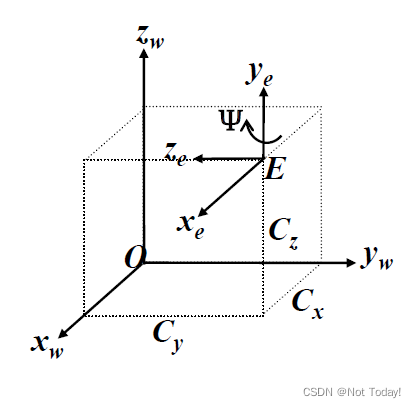
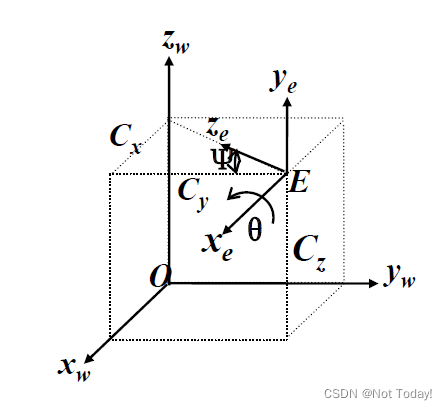
取景變換矩陣

1. 場景坐標系原點平移到視點位置E(Cx,Cy,Cz)
2.繞xe軸逆時針旋轉90o
3.繞ye軸順時針旋轉Ψ角
4.繞xe軸逆時針旋轉θ角
5.調整x軸指向
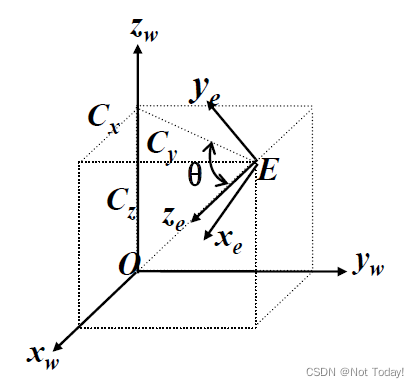
6.對x軸作對稱變換
隱藏面消除的方法——幀緩沖器演算法和畫家演算法的原理、方法和優缺點
消隱演算法分類
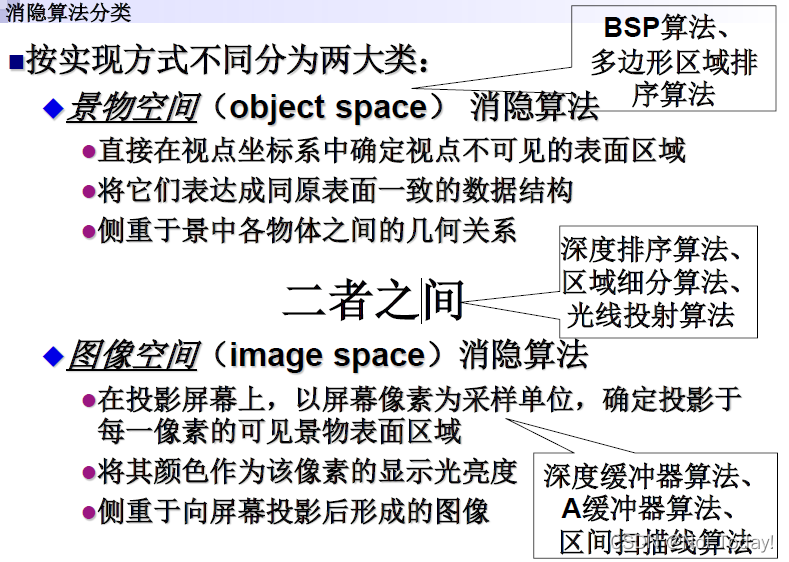
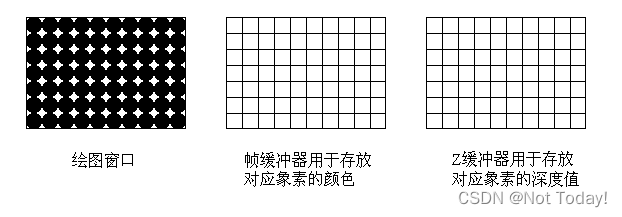
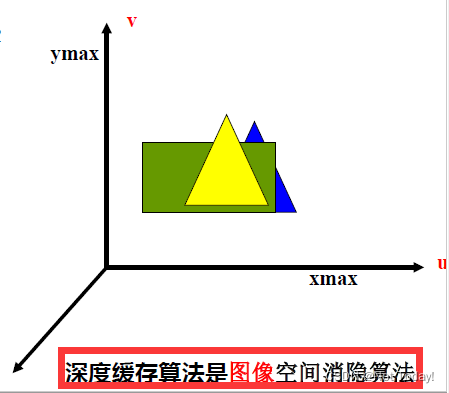
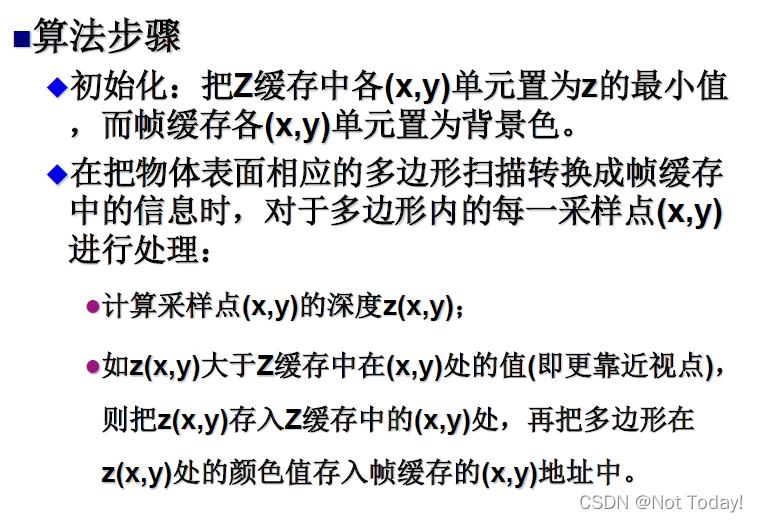
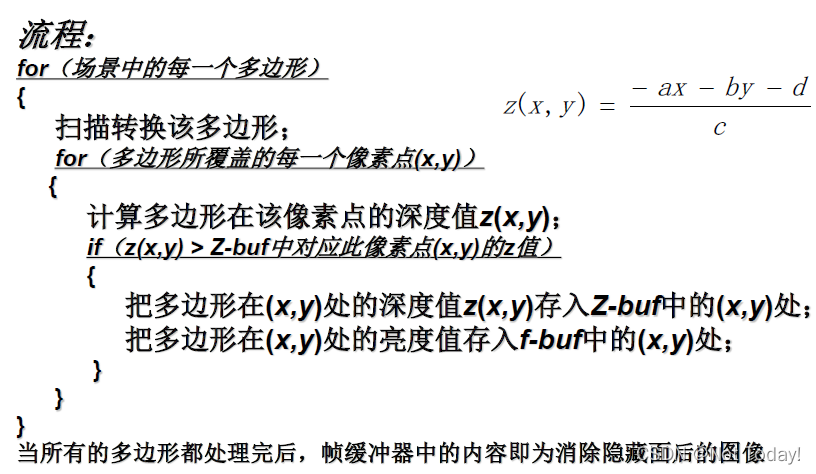
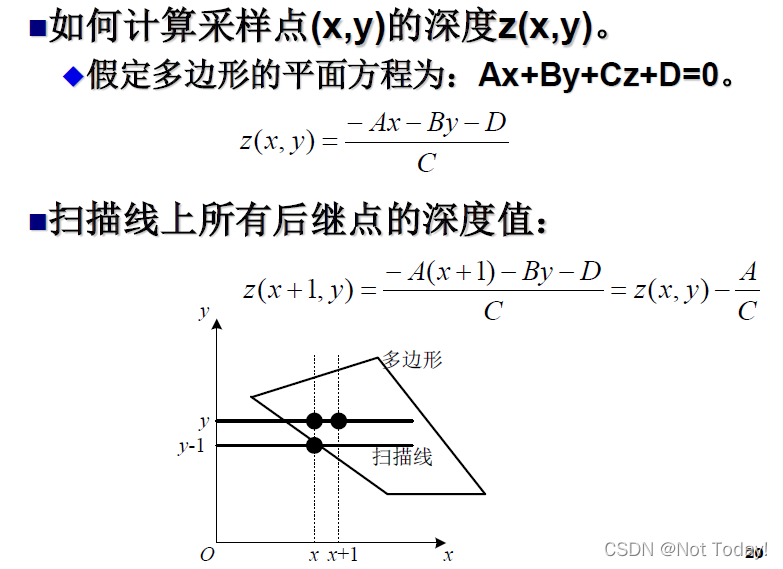
深度快取器演算法
基本原理
顏色快取:保存各點的顏色,
深度快取(Z-Buffer):保存螢屏坐標系上各象素點所對應的深度值,
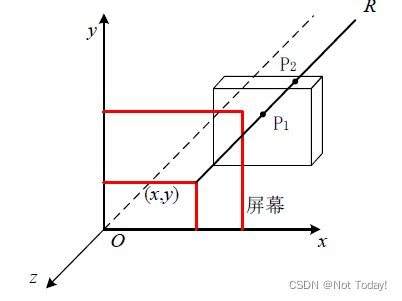

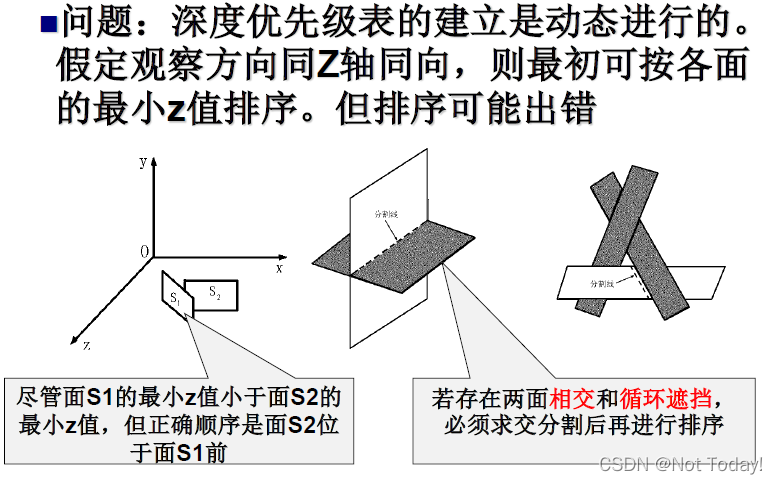
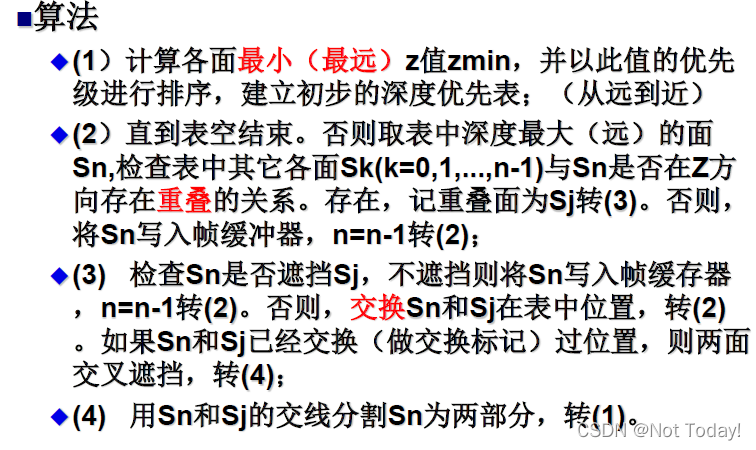
深度排序演算法(畫家演算法)
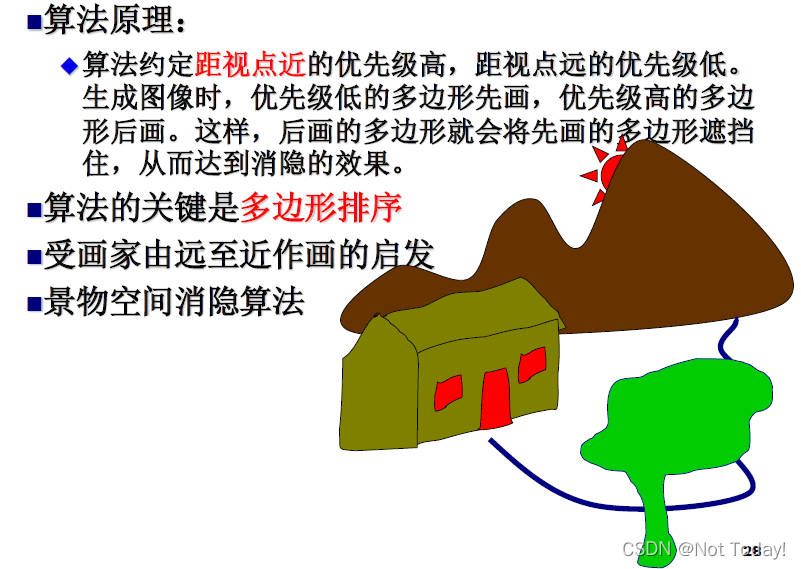
光照模型——基本光照模型和整體光照模型的區別
簡單光照模型
基于經驗,只考慮光源直接照射在景物表面所產生的光照效果(只考慮反射光的作用),
假定物體表面是理想光滑的,均勻反射率
高光顏色與材料無關
區域光照模型
以實際物體表面的微平面理論為基礎,反映表面的粗糙度對反射光強的影響
根據材料的物理性質決定高光顏色
整體光照模型
考慮周圍環境對景物表面的影響
能模擬連續的明暗色調、鏡面高光、陰影
能模擬鏡面映像、光的折射、相鄰景物表面之間的色彩輝映等較為復雜精致的效果
各種光照模型的適用條件、效果、優缺點
簡單光照模型
環境光模型
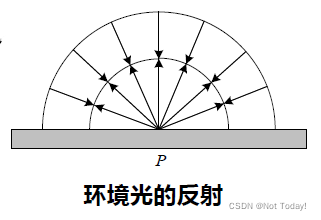
特點:
從周圍環境的各個方向投射來的光
沒有空間或方向上的特征
均勻地照射在物體的各個不同的表面上
等量地向各個方向反射
可視為分布光源,精確計算耗時
物體表面對環境光反射的強度
與…無關
入射光的入射方向
觀察者的觀察方向
物體表面的朝向
僅與…有關
環境光強度
物體表面對環境光的反射系數(材質屬性)
近似模擬的環境光模型:
P點對環境光的反射強度為
Ia 場景中的環境光強度
Ka 物體表明對環境光的漫反射系數
缺點:
物體各個面具有同樣的亮度
只能為景物表面產生一個平淡的明暗效果
觀察者很難辨別景物各個面的層次
不真實,不實用
繪制三維場景時很少僅考慮環境光的作用
通常至少要用一個點光源來照射物體
優點:
在除錯階段可節省不必要的明暗度計算
除錯變換、投影、求交、消隱程式
Lambert漫反射模型
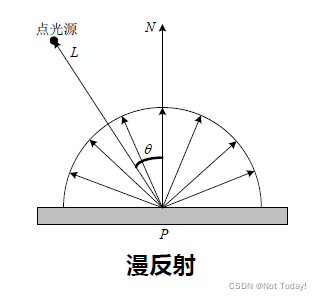
特點:
光源來自一個方向,反射光均勻地射向各個方向
可看成光穿過物體表面層被部分吸收后重新發射出來的光
對光線沿各個方向作同等光強的散射
各點反射光的強度只與…有關
點光源強度、入射角
物體表面的反射系數
物體各面的朝向
而與…無關
觀察者的觀察位置
由Lambert余弦定理可得點P處漫反射光的強度為
Ip 光源照射到P點處入射光強度
Kd 漫反射系數或漫反射率,取決于物體表面材質屬性
Θ P點處面法向量N與入射光方向L的夾角
將環境光與漫反射結合起來

鏡面反射和Phong模型
鏡面反射特點:
物體外表面對入射光的直接反射,鏡面反射遵循反射定律,入射光和反射光分別位于表面法矢的兩側,
有光澤的表面,如光滑的塑料、擦亮的金屬等
如果觀察者正好處在P點的鏡面反射方向上,就會看到一個比周圍亮得多的高光區域,
物體表面越光滑,高光區越小,越亮
空間分布具有一定方向性
朝空間一定方向匯聚
沿鏡面反射的主方向最強
在該方向四周逐漸衰減形成一定的空間分布
光強不僅取決于入射光和表面材料,還與觀察方向有關
觀察者只有位于一定的方向上,才能看到
當視點位于鏡面反射方向附近時,鏡面反射光光強較強,反之較弱,甚至觀察不到
具有與入射光相同的性質
當白光照射在藍色物體上時,高光仍為白色,不是藍色
Phong光照明模型
物體表面光強計算:
從視點觀察到物體上任一點P處的光強度I應為環境光反射光強度Ie、漫反射光強度Id以及鏡面反射光的光強度Is的總和:


明暗處理的方法
Gouraud明暗處理
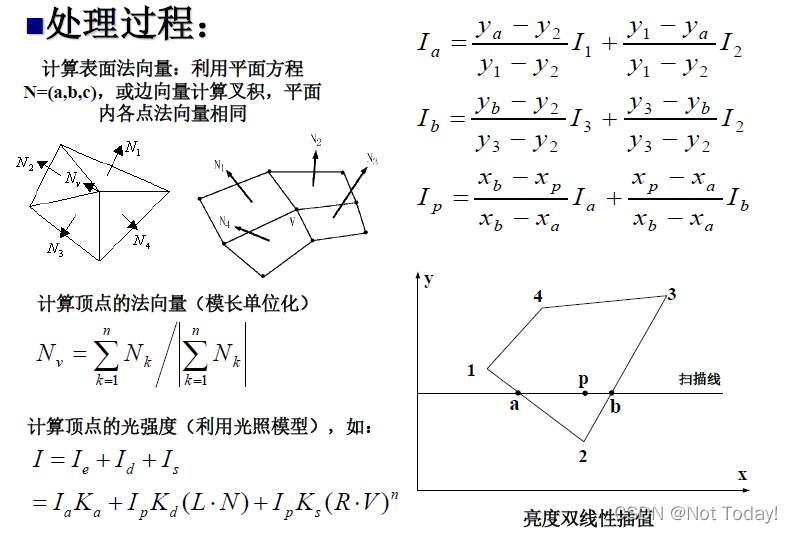
Gouraud明暗處理方法,又稱為亮度插值明暗處理,它通過對多邊形頂點顏色進行線性插值、來繪制其內部各點(雙線性顏色插值)
多邊形內部各點顏色的獲得:對頂點顏色雙線性插值
步驟為:
計算每個多邊形頂點處的平均單位法矢量;
計算多邊形的單位法矢量;
頂點各鄰面的法矢量的平均值
對每個頂點根據簡單光照模型來計算其光強;
利用光照模型計算頂點的顏色
在多邊形表面上將頂點強度進行線性插值,
在掃描線消隱演算法中對頂點顏色進行雙線性插值獲取位于多邊形內掃描線上各點的顏色,
缺點:
只適用于簡單的漫反射光照模型
不能正確模擬鏡面反射高光形狀
用于動態顯示物體時
物體表面明暗以不規則方式進行變化,高光問題
線性光強度插值引起的Mach-band效應
光亮度變化不連續的邊界處出現過亮或過暗的條紋
公共頂點處顏色不連續,頂點方向不具代表性
Phong明暗處理
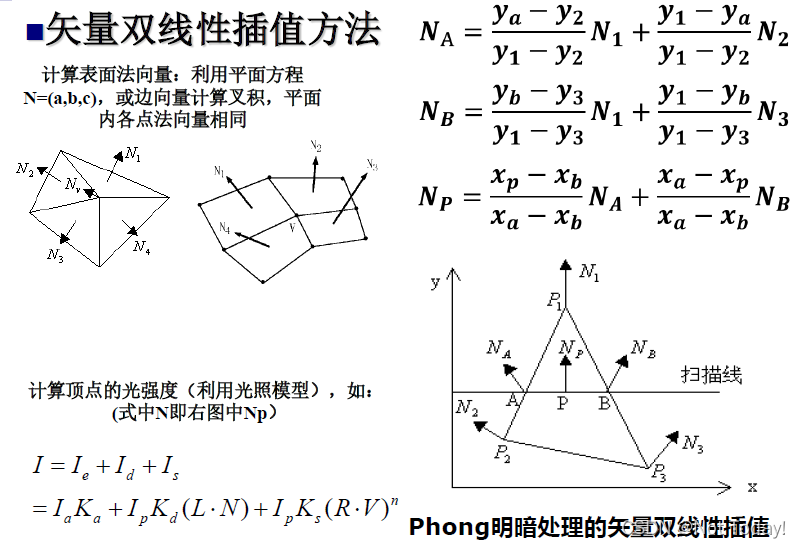
Phong明暗處理方法,又稱為法矢量插值明暗處理,它對多邊形頂點的法矢量進行插值以產生中間各點的法矢量,(雙線性法矢量插值)
步驟為:
計算每個多邊形頂點處的平均單位法矢量;
計算多邊形的單位法矢量;
頂點各鄰面的法矢量的平均值
用雙線性插值方法求得多邊形內部各點的法矢量,
最后按光照模型確定多邊形內部各點的光強,
優點:繪制的圖形比Gouraud方法更真實
缺點:計算量遠大于Gouraud方法
第10章 計算機影片——簡單了解
了解計算機影片常用的關鍵技術
(以下為從書中自行歸納的,建議閱讀課本,了解相關技術的具體運用)
關鍵幀技術
計算機通過對關鍵幀進行插值生成中間畫面,這種影片技術稱為關鍵幀技術,適用于對剛體運動的模擬,
存在的主要問題:
1.互動回應慢
2.物體運動的物理正確性和自然真實性難以保證
樣條驅動技術
計基于運動學描述,通過用戶事先指定一條物體運動的軌跡(通常用三次引數樣條表示)來指定物體沿該軌跡運動,這種方法稱為樣條驅動影片,也稱運動軌跡法,
Morphing和FFD變形技術
Morphing是指將一個給定的數字影像或者幾何形狀S以一種自然流暢的、光滑連續的方式漸變為另一個數字影像或者幾何形狀T,在這種漸變程序中,中間幀兼具S和T的特征,是S到T的過渡形狀,
FFD這種方法引入了一種三變數B樣條體的變形工具Lattice,不用對物體直接變形,而是要把變形的物體嵌入一個稱為Lattice的空間,通過對物體所嵌入的Lattice空間進行變形,使嵌入在其中的物體也隨著Lattice進行變形,
FFD主要缺點:缺乏對變形的細微控制,如模擬人臉表情影片等效果不夠理想,
運動捕獲技術
程序:經過訓練的真實演員按導演的要求做著各種不同的動作,他們身上掛滿了感應器,這些感應器連著一臺計算機,他們的動作被轉換為數字資訊記錄到計算機中,計算機收集這些資料后將資訊傳遞到作業室,然后結果被3D化,在計算機中以線條形式表現出來,形成電影中角色的基礎...
其他影片技術
程序影片
物體的運動和變形可由一個程序來控制,通常要基于一定的數學模型或物理規律(如彈性理論、動力學、碰撞檢測等)對物體的運動進行控制,
關節影片和人體影片
一直是最困難和最具挑戰性的課題之一
基于物理模型的影片
基于物理模型的影片技術考慮了物體在真實世界中的屬性,如具有質量、轉動慣矩、彈性、摩擦力等,并基于動力學原理來自動產生物體的運動,
注意事項
考試每章都有,比如變換部分,要求要給出條件寫出變換,類似半期;可能給定時間引數,隨時間的變化,每個變化之間,幾何變換是怎么計算的,每道大題10分,
復習參考資料:教材課后習題、六次作業
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/402585.html
標籤:其他
上一篇:影像卷積的理解