歡迎大家來到“Python從零到壹”,在這里我將分享約200篇Python系列文章,帶大家一起去學習和玩耍,看看Python這個有趣的世界,所有文章都將結合案例、代碼和作者的經驗講解,真心想把自己近十年的編程經驗分享給大家,希望對您有所幫助,文章中不足之處也請海涵,Python系列整體框架包括基礎語法10篇、網路爬蟲30篇、可視化分析10篇、機器學習20篇、大資料分析20篇、影像識別30篇、人工智能40篇、Python安全20篇、其他技巧10篇,您的關注、點贊和轉發就是對秀璋最大的支持,知識無價人有情,希望我們都能在人生路上開心快樂、共同成長,
該系列文章主要講解Python OpenCV影像處理和影像識別知識,前期主要講解影像處理基礎知識、OpenCV基礎用法、常用影像繪制方法、影像幾何變換等,中期講解影像處理的各種運算,包括影像點運算、形態學處理、影像銳化、影像增強、影像平滑等,后期研究影像識別、影像分割、影像分類、影像特效處理以及影像處理相關應用,
上一篇文章介紹了影像融合處理和ROI區域繪制,同時補充影像屬性、通道和型別轉換,這篇文章將詳細講解影像幾何變換,包括影像平移、影像縮放和影像旋轉,希望文章對您有所幫助,如果有不足之處,還請海涵,
文章目錄
- 一.影像幾何變換
- 二.影像平移
- 三.影像縮放
- 四.影像旋轉
- 五.總結
下載地址:
- https://github.com/eastmountyxz/Python-zero2one
前文賞析:
第一部分 基礎語法
- [Python從零到壹] 一.為什么我們要學Python及基礎語法詳解
- [Python從零到壹] 二.語法基礎之條件陳述句、回圈陳述句和函式
- [Python從零到壹] 三.語法基礎之檔案操作、CSV檔案讀寫及面向物件
第二部分 網路爬蟲
- [Python從零到壹] 四.網路爬蟲之入門基礎及正則運算式抓取博客案例
- [Python從零到壹] 五.網路爬蟲之BeautifulSoup基礎語法萬字詳解
- [Python從零到壹] 六.網路爬蟲之BeautifulSoup爬取豆瓣TOP250電影詳解
- [Python從零到壹] 七.網路爬蟲之Requests爬取豆瓣電影TOP250及CSV存盤
- [Python從零到壹] 八.資料庫之MySQL基礎知識及操作萬字詳解
- [Python從零到壹] 九.網路爬蟲之Selenium基礎技術萬字詳解(定位元素、常用方法、鍵盤滑鼠操作)
- [Python從零到壹] 十.網路爬蟲之Selenium爬取在線百科知識萬字詳解(NLP語料構造必備技能)
第三部分 資料分析和機器學習
- [Python從零到壹] 十一.資料分析之Numpy、Pandas、Matplotlib和Sklearn入門知識萬字詳解(1)
- [Python從零到壹] 十二.機器學習之回歸分析萬字總結全網首發(線性回歸、多項式回歸、邏輯回歸)
- [Python從零到壹] 十三.機器學習之聚類分析萬字總結全網首發(K-Means、BIRCH、層次聚類、樹狀聚類)
- [Python從零到壹] 十四.機器學習之分類演算法三萬字總結全網首發(決策樹、KNN、SVM、分類演算法對比)
- [Python從零到壹] 十五.文本挖掘之資料預處理、Jieba工具和文本聚類萬字詳解
- [Python從零到壹] 十六.文本挖掘之詞云熱點與LDA主題分布分析萬字詳解
- [Python從零到壹] 十七.可視化分析之Matplotlib、Pandas、Echarts入門萬字詳解
- [Python從零到壹] 十八.可視化分析之Basemap地圖包入門詳解
- [Python從零到壹] 十九.可視化分析之熱力圖和箱圖繪制及應用詳解
- [Python從零到壹] 二十.可視化分析之Seaborn繪圖萬字詳解
- [Python從零到壹] 二十一.可視化分析之Pyechart繪圖萬字詳解
- [Python從零到壹] 二十二.可視化分析之OpenGL繪圖萬字詳解
- [Python從零到壹] 二十三.十大機器學習演算法之決策樹分類分析詳解(1)
- [Python從零到壹] 二十四.十大機器學習演算法之KMeans聚類分析詳解(2)
- [Python從零到壹] 二十五.十大機器學習演算法之KNN演算法及影像分類詳解(3)
- [Python從零到壹] 二十六.十大機器學習演算法之樸素貝葉斯演算法及文本分類詳解(4)
- [Python從零到壹] 二十七.十大機器學習演算法之線性回歸演算法分析詳解(5)
- [Python從零到壹] 二十八.十大機器學習演算法之SVM演算法分析詳解(6)
- [Python從零到壹] 二十九.十大機器學習演算法之隨機森林演算法分析詳解(7)
- [Python從零到壹] 三十.十大機器學習演算法之邏輯回歸演算法及惡意請求檢測應用詳解(8)
- [Python從零到壹] 三十一.十大機器學習演算法之Boosting和AdaBoost應用詳解(9)
- [Python從零到壹] 三十二.十大機器學習演算法之層次聚類和樹狀圖聚類應用詳解(10)
第四部分 Python影像處理基礎
- [Python從零到壹] 三十三.影像處理基礎篇之什么是影像處理和OpenCV配置
- [Python從零到壹] 三十四.OpenCV入門詳解——顯示讀取修改及保存影像
- [Python從零到壹] 三十五.影像處理基礎篇之OpenCV繪制各類幾何圖形
- [Python從零到壹] 三十六.影像處理基礎篇之影像算術與邏輯運算詳解
- [Python從零到壹] 三十七.影像處理基礎篇之影像融合處理和ROI區域繪制
- [Python從零到壹] 三十八.影像處理基礎篇之影像幾何變換(平移縮放旋轉)
第五部分 Python影像運算和影像增強
第六部分 Python影像識別和影像處理經典案例
第七部分 NLP與文本挖掘
第八部分 人工智能入門知識
第九部分 網路攻防與AI安全
第十部分 知識圖譜構建實戰
擴展部分 人工智能高級案例
作者新開的“娜璋AI安全之家”將專注于Python和安全技術,主要分享Web滲透、系統安全、人工智能、大資料分析、影像識別、惡意代碼檢測、CVE復現、威脅情報分析等文章,雖然作者是一名技術小白,但會保證每一篇文章都會很用心地撰寫,希望這些基礎性文章對你有所幫助,在Python和安全路上與大家一起進步,
一.影像幾何變換
影像幾何變換不改變影像的像素值,在影像平面上進行像素變換,適當的幾何變換可以最大程度地消除由于成像角度、透視關系乃至鏡頭自身原因所造成的幾何失真所產生的負面影響,幾何變換常常作為影像處理應用的預處理步驟,是影像歸一化的核心作業之一[1],
一個幾何變換需要兩部分運算:
- 空間變換:包括平移、縮放、旋轉和正平行投影等,需要用它來表示輸出影像與輸入影像之間的像素映射關系,
- 灰度插值演算法:按照這種變換關系進行計算,輸出影像的像素可能被映射到輸入影像的非整數坐標上[2],
影像幾何變換在變換程序中會建立一種原影像像素與變換后影像像素之間的映射關系,通過這種關系,能夠從一方的像素計算出另一方的像素的坐標位置,通常將影像坐標映射到輸出的程序稱作向前映射,反之,將輸出影像映射到輸入的程序稱作向后映射,向后映射在實踐中使用較多,原因是能夠避免使用向前映射中出現映射不完全和映射重疊的問題,
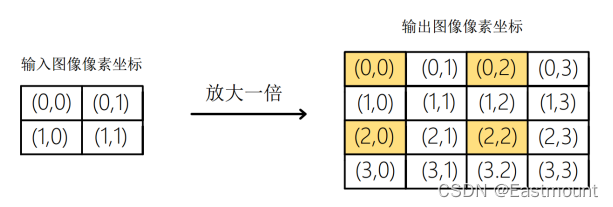
圖6-1展示了影像放大的示例,右邊圖中只有(0,0)、(0,2)、(2,0)、(2,2)四個坐標根據映射關系在原影像中找到了相對應的像素,其余的12個坐標沒有有效值[3],
對于數字影像而言,像素的坐標是離散型非負整數,但是在進行變換的程序中有可能產生浮點坐標值,這在影像處理中是一個無效的坐標,為了解決這個問題需要用到插值演算法,常見演算法如下:
- 最近鄰插值
- 雙線性插值
- 雙立方插值
影像變換是建立在矩陣運算基礎上,通過矩陣運算可以很快找到對應關系,在這篇文章中,我們將介紹常見的影像幾何變換,包括圖形平移、影像縮放、影像旋轉、影像鏡像、影像仿射、影像透視等,
二.影像平移
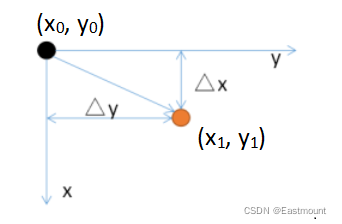
影像平移是將影像中的所有像素點按照給定的平移量進行水平或垂直方向上的移動,假設原始像素的位置坐標為(x0,y0),經過平移量(△x,△y)后,坐標變為(x1, y1),如圖6-2所示[3-5],
用數學式子表示為公式(6-1),
用矩陣表示如公式(6-2)所示:
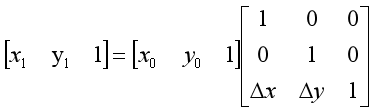
式子中,矩陣稱為平移變換矩陣或因子,△x和△y稱為平移量,影像平移首先定義平移矩陣M,再呼叫warpAffine()函式實作平移,核心函式如下:
- M = np.float32([[1, 0, x], [0, 1, y]])
– M表示平移矩陣,其中x表示水平平移量,y表示垂直平移量 - shifted = cv2.warpAffine(src, M, dsize[, dst[, flags[, borderMode[, borderValue]]]])
– src表示原始影像
– M表示平移矩陣
– dsize表示變換后的輸出影像的尺寸大小
– dst為輸出影像,其大小為dsize,型別與src相同
– flag表示插值方法的組合和可選值
– borderValue表示像素外推法,當borderMode = BORDER_TRANSPARENT時,表示目標影像中的像素不會修改源影像中的“例外值”,
– borderValue用于邊界不變的情況,默認情況下為0
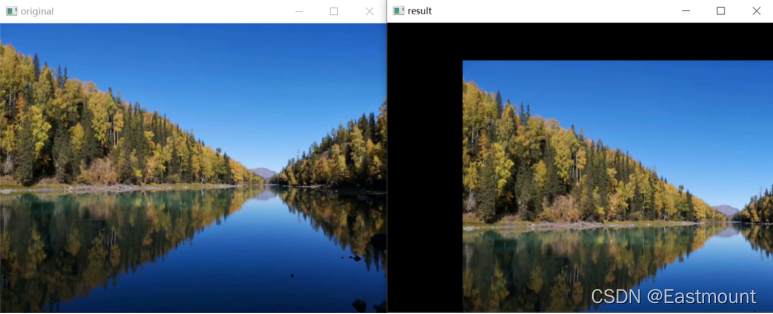
下面代碼是影像平移的一個簡單案例,它定義了影像平移矩陣M,然后呼叫warpAffine()函式將原始影像垂直向下平移了50個像素,水平向右平移了100個像素,
# -*- coding:utf-8 -*-
# By:Eastmount
import cv2
import numpy as np
#讀取圖片
src = cv2.imread('scenery.png')
#影像平移矩陣
M = np.float32([[1, 0, 100], [0, 1, 50]])
#獲取原始影像列數和行數
rows, cols = src.shape[:2]
#影像平移
result = cv2.warpAffine(src, M, (cols, rows))
#顯示影像
cv2.imshow("original", src)
cv2.imshow("result", result)
#等待顯示
cv2.waitKey(0)
cv2.destroyAllWindows()
輸出結果如圖6-3所示:
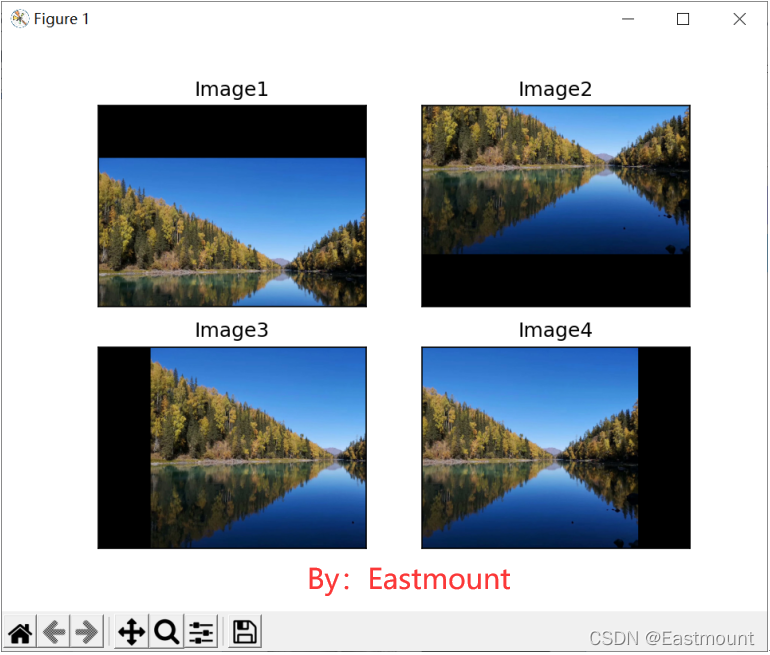
下面一個案例是將影像分別向下、向上、向右、向左平移,再呼叫matplotlib繪圖庫依次繪制的程序,
# -*- coding:utf-8 -*-
# By:Eastmount
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取圖片
img = cv2.imread('scenery.png')
image = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
#影像平移
#垂直方向 向下平移100
M = np.float32([[1, 0, 0], [0, 1, 100]])
img1 = cv2.warpAffine(image, M, (image.shape[1], image.shape[0]))
#垂直方向 向上平移100
M = np.float32([[1, 0, 0], [0, 1, -100]])
img2 = cv2.warpAffine(image, M, (image.shape[1], image.shape[0]))
#水平方向 向右平移100
M = np.float32([[1, 0, 100], [0, 1, 0]])
img3 = cv2.warpAffine(image, M, (image.shape[1], image.shape[0]))
#水平方向 向左平移100
M = np.float32([[1, 0, -100], [0, 1, 0]])
img4 = cv2.warpAffine(image, M, (image.shape[1], image.shape[0]))
#回圈顯示圖形
titles = [ 'Image1', 'Image2', 'Image3', 'Image4']
images = [img1, img2, img3, img4]
for i in range(4):
plt.subplot(2,2,i+1), plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
輸出結果如圖6-4所示,它從四個方向都進行了平移,并且呼叫subplot()函式將四個子圖繪制在一起,
三.影像縮放
影像縮放(image scaling)是指對數字影像的大小進行調整的程序,在Python中,影像縮放主要呼叫resize()函式實作,函式原型如下:
- result = cv2.resize(src, dsize[, result[. fx[, fy[, interpolation]]]])
– src表示原始影像
– dsize表示影像縮放的大小
– result表示影像結果
– fx表示影像x軸方向縮放大小的倍數
– fy表示影像y軸方向縮放大小的倍數
– interpolation表示變換方法,CV_INTER_NN表示最近鄰插值;CV_INTER_LINEAR表示雙線性插值(預設使用);CV_INTER_AREA表示使用像素關系重采樣,當影像縮小時,該方法可以避免波紋出現,當影像放大時,類似于CV_INTER_NN;CV_INTER_CUBIC表示立方插值
常見的影像縮放兩種方式如下所示,第一種方式是將原影像設定為(160, 160)像素大小,第二種方式是將原始影像縮小為0.5倍,
- result = cv2.resize(src, (160,160))
- result = cv2.resize(src, None, fx=0.5, fy=0.5)
設(x1, y1)是縮放后的坐標,(x0, y0)是縮放前的坐標,sx、sy為縮放因子,則影像縮放的計算公式(6-3)所示:
下面是Python實作影像縮放的代碼,它將所讀取的風景影像進行縮小,
# -*- coding:utf-8 -*-
# By:Eastmount
import cv2
import numpy as np
#讀取圖片
src = cv2.imread('scenery.png')
#影像縮放
result = cv2.resize(src, (200,100))
print(result.shape)
#顯示影像
cv2.imshow("original", src)
cv2.imshow("result", result)
#等待顯示
cv2.waitKey(0)
cv2.destroyAllWindows()
輸出結果如圖6-5所示,影像縮小為(100, 200, 3)像素,注意,代碼中呼叫函式 cv2.resize(src, (200,100)) 設定新影像大小dsize的列數為200,行數為100,
下面講解另一種影像縮放變換的方法,通過原始影像像素乘以縮放系數進行影像變換,代碼如下:
# -*- coding:utf-8 -*-
# By:Eastmount
import cv2
import numpy as np
#讀取圖片
src = cv2.imread('scenery.png')
rows, cols = src.shape[:2]
print(rows, cols)
#影像縮放 dsize(列,行)
result = cv2.resize(src, (int(cols*0.6), int(rows*1.2)))
#顯示影像
cv2.imshow("src", src)
cv2.imshow("result", result)
cv2.waitKey(0)
cv2.destroyAllWindows()
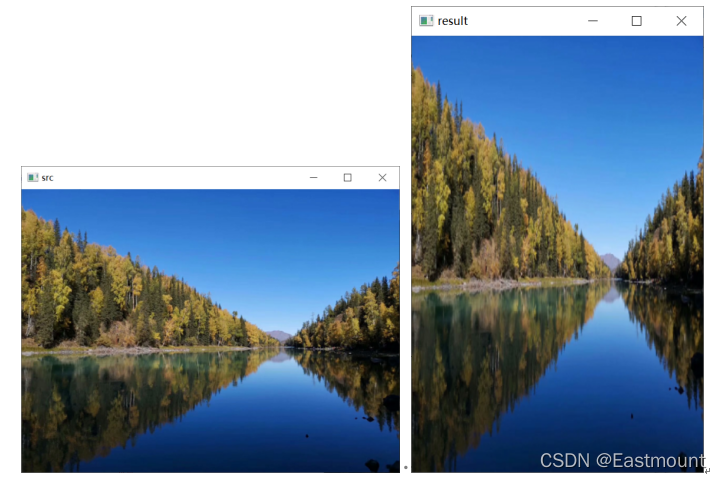
獲取圖片“scenery.png”的元素像素值,其rows值為384,cols值為512,接著進行寬度縮小0.6倍、高度放大1.2倍的處理,運行前后對比效果如圖6-6所示,
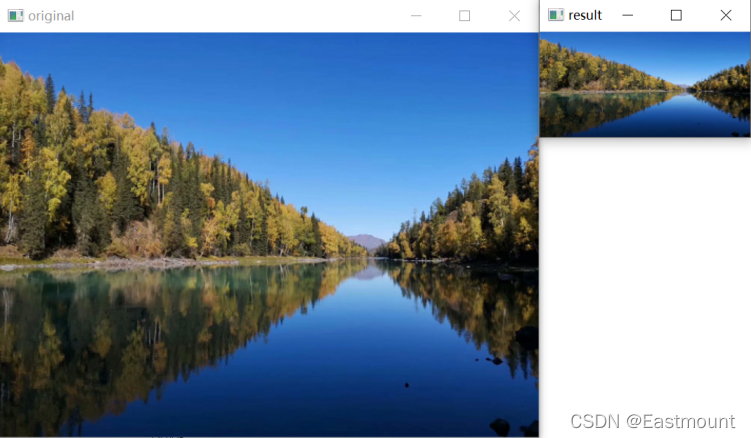
最后講解呼叫(fx,fy)引數設定縮放倍數的方法,對原始影像進行放大或縮小操作,下面代碼是fx和fy方向縮小至原始影像0.3倍的操作,
# -*- coding:utf-8 -*-
# By:Eastmount
import cv2
import numpy as np
#讀取圖片
src = cv2.imread('scenery.png')
rows, cols = src.shape[:2]
print(rows, cols)
#影像縮放
result = cv2.resize(src, None, fx=0.3, fy=0.3)
#顯示影像
cv2.imshow("src", src)
cv2.imshow("result", result)
#等待顯示
cv2.waitKey(0)
cv2.destroyAllWindows()
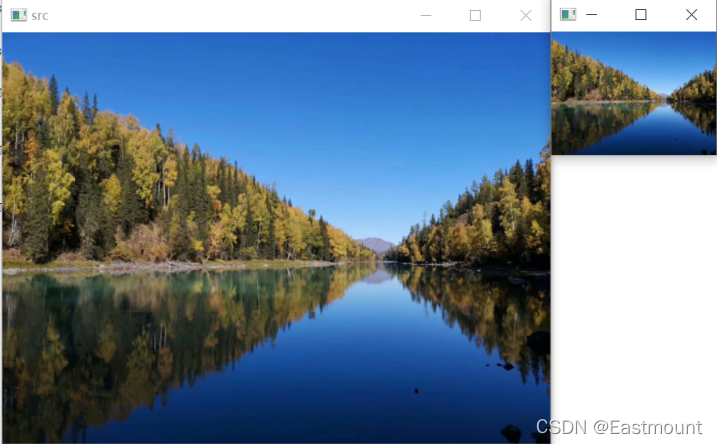
輸出的結果如圖6-7所示,這是按比例0.3×0.3縮小的,
四.影像旋轉
影像旋轉是指影像以某一點為中心旋轉一定的角度,形成一幅新的影像的程序,影像旋轉變換會有一個旋轉中心,這個旋轉中心一般為影像的中心,旋轉之后影像的大小一般會發生改變,圖6-8表示原始影像的坐標(x0, y0)旋轉至(x1, y1)的程序,
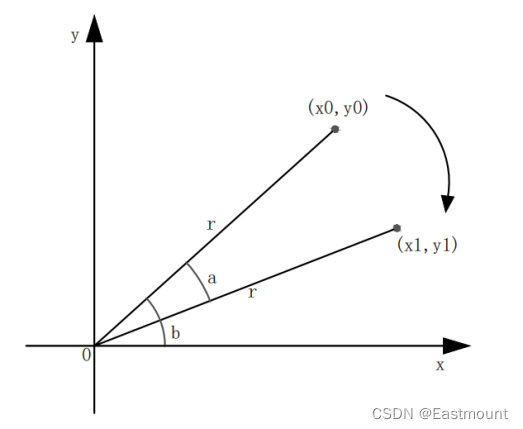
旋轉公式如(6-4)所示,其中(m,n)是旋轉中心,a是旋轉的角度,(left,top)是旋轉后影像的左上角坐標,

影像旋轉變換主要呼叫getRotationMatrix2D()函式和warpAffine()函式實作,繞影像的中心旋轉,函式原型如下:
-
M = cv2.getRotationMatrix2D(center, angle, scale)
– center表示旋轉中心點,通常設定為(cols/2, rows/2)
– angle表示旋轉角度,正值表示逆時針旋轉,坐標原點被定為左上角
– scale表示比例因子 -
rotated = cv2.warpAffine(src, M, (cols, rows))
– src表示原始影像
– M表示旋轉引數,即getRotationMatrix2D()函式定義的結果
– (cols, rows)表示原始影像的寬度和高度
實作代碼如下所示:
# -*- coding:utf-8 -*-
# By:Eastmount
import cv2
import numpy as np
#讀取圖片
src = cv2.imread('scenery.png')
#源影像的高、寬 以及通道數
rows, cols, channel = src.shape
#繞影像的中心旋轉
#函式引數:旋轉中心 旋轉度數 scale
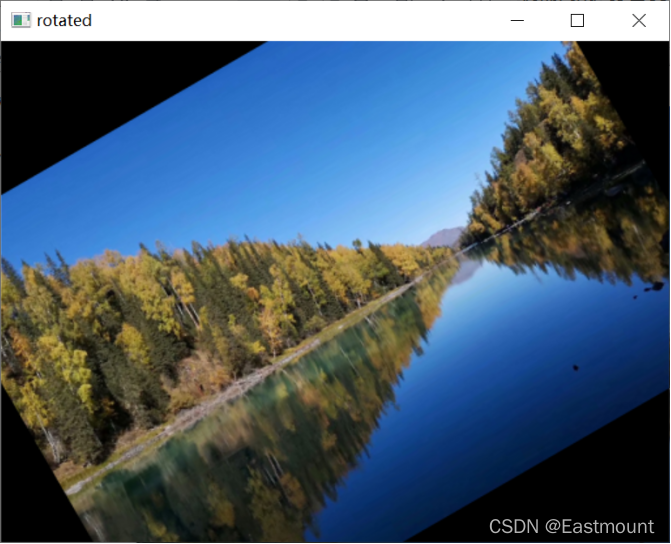
M = cv2.getRotationMatrix2D((cols/2, rows/2), 30, 1)
#函式引數:原始影像 旋轉引數 元素影像寬高
rotated = cv2.warpAffine(src, M, (cols, rows))
#顯示影像
cv2.imshow("src", src)
cv2.imshow("rotated", rotated)
#等待顯示
cv2.waitKey(0)
cv2.destroyAllWindows()
顯示效果如圖6-9所示,繞影像中心點逆時針旋轉30度,
五.總結
本章主要講解Python和OpenCV的影像幾何變換,詳細介紹了影像平移、影像縮放和影像旋轉,這些知識點也是我們PC端或手機端影像處理應用常見的演算法,讀者可以嘗試結合這些應用完成一套影像處理軟體,
最近寒假日更,為了感謝讀者,同時感謝在求學路上的同行者,不負遇見,勿忘初心,影像處理系列主要包括三部分,分別是:
這周的留言感慨~
十二年CSDN的博客分享,如果要說分享最讓我開心的是什么?不是傳道,不是授業,也不是解惑,而是接下來這類事,這些年已經陸續鼓勵了一些朋友當老師,而昨天得知這一位博友真的去到新疆南疆成為了一名小學老師,我很是感動,是真的感動,六年前我曾鼓勵他如果想,就放棄高額工資的互聯網大廠,去做自己想做的,沒想到已經當了四年老師,又當爹又當媽,國語普及,文化教育,這里面的艱辛不是一兩句道得清,除了佩服就是鼓勵,
正如你說的一樣,“一輩子總得做點有意義的事情,生命實在太短暫,一定要活得積極、正面”,或許,這也是我在CSDN分享博客的最大意義,再比如云南那位老友的留言,“農村的孩子下雨沒有傘,只能拼命奔跑”,希望你以后也能成為一名教師,感恩有你們,感謝有你們,我也希望自己早日畢業回到家鄉,花上三四十年做好兩件事,一是認真教書,二是將少數民族文物搶救和文字語音保護做好,也鼓勵更多人一起加入進來,自己雖然很菜吧,但還是有一些喜歡的事,尤其陪伴愛的人,挺好,愛你們喔,2022年繼續加油,在CSDN分享更高質量的博客和專欄,
(By:娜璋之家 Eastmount 2022-01-27 夜于貴陽 https://blog.csdn.net/Eastmount )
參考文獻:
- [1]岡薩雷斯. 數字影像處理(第3版)[M]. 北京:電子工業出版社, 2013.
- [2]阮秋琦. 數字影像處理學(第3版)[M]. 北京:電子工業出版社,2008.
- [3]毛星云, 冷雪飛. OpenCV3編程入門[M]. 北京:電子工業出版社, 2015.
- [4]Eastmount. [Python影像處理] 六.影像縮放、影像旋轉、影像翻轉與影像平移[EB/OL]. (2018-09-06). https://blog.csdn.net/Eastmount/article/details/82454335.
- [5]Eastmount. [數字影像處理] 六.MFC空間幾何變換之影像平移、鏡像、旋轉、縮放詳解[EB/OL]. (2015-06-04). https://blog.csdn.net/Eastmount/article/details/46345299.
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/421847.html
標籤:AI
上一篇:TF/pytorch/caffe-CV/NLP/音頻-全生態CPU部署實戰演示-英特爾openVINO工具套件課程總結(下)