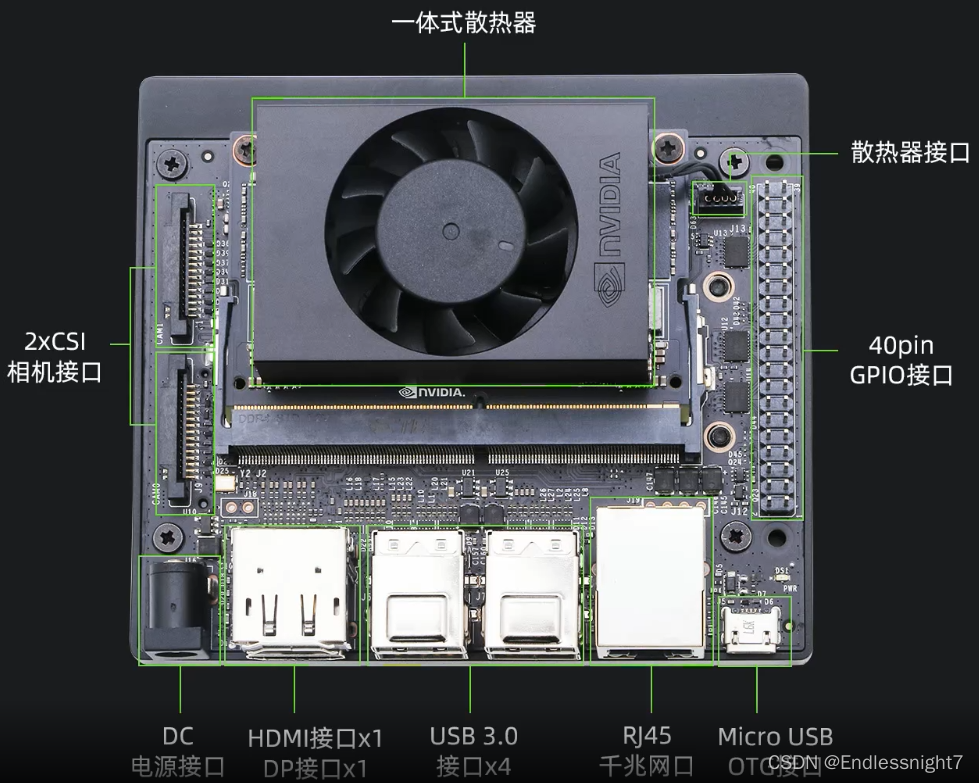
前言:最近在使用英偉達的Jetson-Xavier-NX板子,主要用于機器視覺,第一次接觸NX板子,將配置的程序在這里記錄一下,希望能對你有所幫助,
目錄
一、鏡像燒錄
1.下載鏡像
2.寫入鏡像
3.開機
4.遠程連接
二、環境配置
1.更新源
2.安裝Miniforge(Anaconda的arm代替版)
3.配置國科大conda環境
4.添加環境變數
5.配置pytorch環境
5.1創建虛擬環境
5.2安裝pytorch
5.3安裝torchvision
三、運行yolov5
一、鏡像燒錄
1.下載鏡像
nx板子的鏡像都保存在TF卡中,所以使用nx板子之前需要將鏡像燒錄到TF卡中,鏡像是在英偉達官網下載的,地址是:Jetson 下載中心 | NVIDIA Developer
百度網盤鏈接:https://pan.baidu.com/s/1T6XIMQERzkMJDCoELcapNw 提取碼:5ukg

2.寫入鏡像
鏡像下載好后,需要用讀卡器將TF卡與筆記本連接,使用軟體進行燒錄,我使用的是balenaEtcher進行燒錄,燒錄鏡像分為兩步,第一步是格式化TF卡,第二步是寫入,balenaEtcher會完成這兩步操作,
balenaEtcher百度網盤鏈接:https://pan.baidu.com/s/1EHlA0o5kT-lfeaPPuFkpWQ 提取碼:j3tq
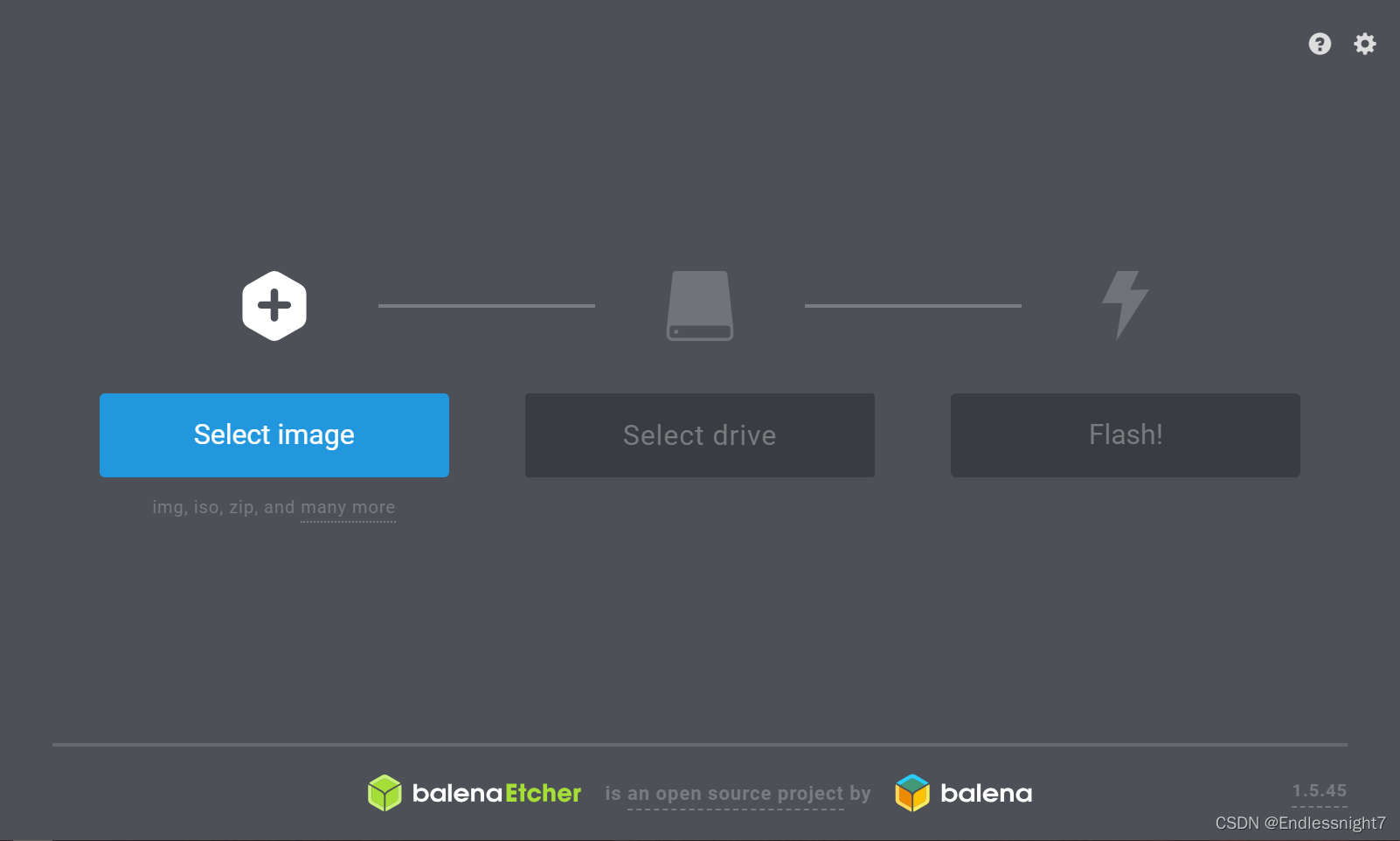
Select image:自己選擇下載好的鏡像檔案(sd-blob.img)
Select drive: 軟體會自動選擇已插入的TF卡
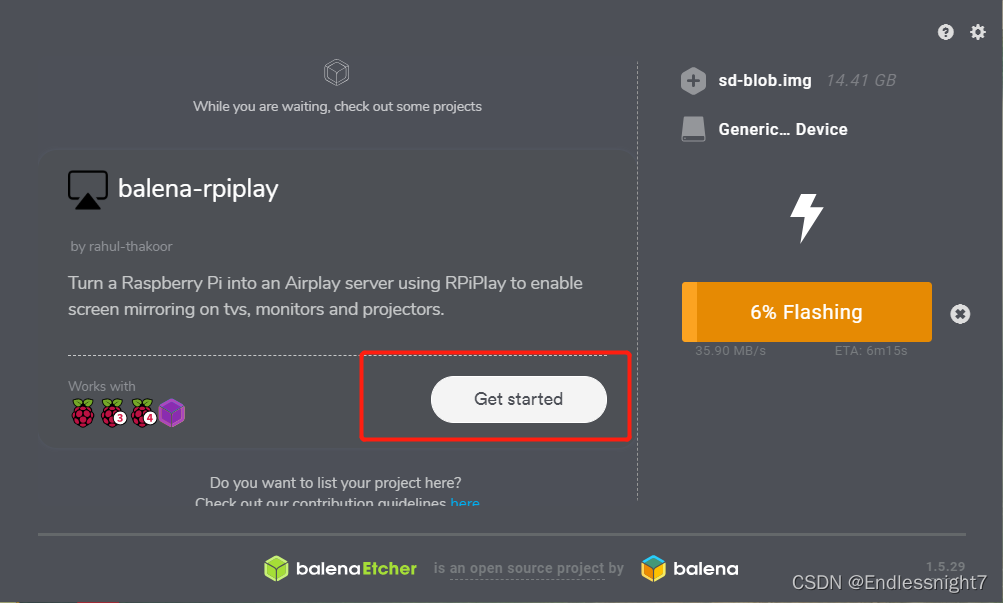
燒錄鏡像時會把原先的TF卡分成很多卡(F、G、H、I...不必驚慌,出現以下提示框,點右上角×就行)

接下來按照提示操作就行,下圖紅框無需點擊,
3.開機
開機前的準備:顯示幕1個、鍵盤1個、滑鼠1個,NX板子電源線連接即可開機,開機程序中會有一個類似Windows的開機設定,按照提示操作就行,系統語言默認選擇English,NX板子自帶wifi模塊,開機程序中會提示你連接wifi,連接即可,
4.遠程連接
使用遠程連接軟體可以連接NX板子,方便操作,前提是在同一網路下,開機后打開終端(ctrl+alt+t),輸入ifconfig查看看wlan下地址,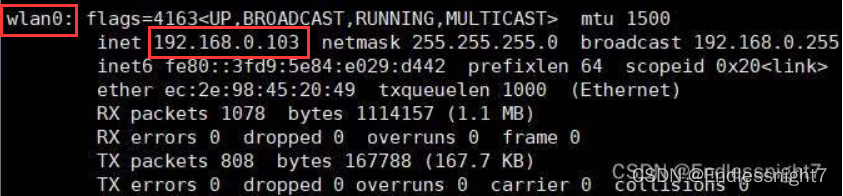
遠程連接軟體我使用的是Xshell和Xftp,如果無法連接,先嘗試一下是否能ping通,一般而言,默認都是能ping通的,
二、環境配置
1.更新源
打開終端輸入:(一步一步來,網速慢的話時間會長一點)
sudo apt-get update
sudo apt-get full-upgrade
有不理解的,可以參考以下亞博的教程:Jetson Xavier NX ,教程中關于cuda、cudnn的配置可以稍后再弄,
2.安裝Miniforge(Anaconda的arm代替版)
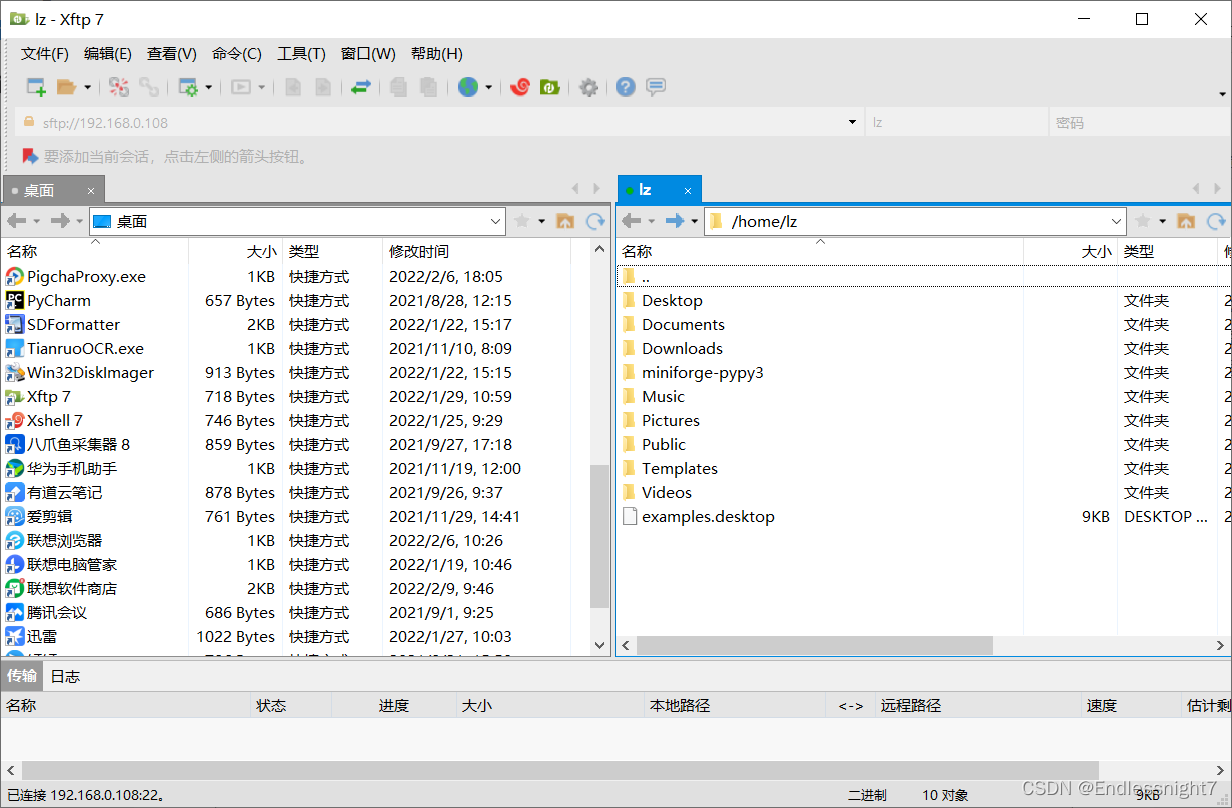
由于NX板子Ubuntu系統是arrch64架構的,不支持Anaconda,所以選擇MInifore進行安裝,使用xftp遠程連接NX板子(操作與Xshell連接一樣),連接后你會看到以下界面,新建或選擇一個檔案夾將Miniforge的安裝包拖入即可,
Miniforge下載地址 Releases · conda-forge/miniforge · GitHub
百度網盤鏈接:https://pan.baidu.com/s/1AkRRz95XSKsVXpI7edy9cg 提取碼:cbzz
今天先寫到這里,朋友叫我去烤燒烤,網盤鏈接下午再寫上!
燒烤不錯,繼續寫~
cd進入Miniforge存放的檔案夾,輸入以下命令:
sh Miniforge-pypy3-4.10.3-5-Linux-aarch64.sh安裝程序并不是自動的,有些地方會讓你按Enter確認,好好看看提示,基本上就沒什么問題了,
3.配置國科大conda環境
conda config --prepend channels https://mirrors.ustc.edu.cn/anaconda/pkgs/main/
conda config --prepend channels https://mirrors.ustc.edu.cn/anaconda/pkgs/free/
conda config --set show_channel_urls yes4.添加環境變數
首先輸入以下命令
vim ~/.bashrc按 ↓ 到文本底部,再按 i 對文本進行編輯,將以下內容粘貼到最下方
# Miniforge環境變數
export PATH=/home/moemil/miniforge-pypy3/bin:$PATH
# cuda環境變數
export PATH=/usr/local/cuda/bin:$PATH
export LD_LIBRARY_PATH=/usr/local/cuda/lib64:$LD_LIBRARY_PATH
export CUDA_ROOT=/usr/local/cuda添加完成后按esc,然后輸入冒號(shift+回車左邊按鍵),輸入wq!,強制保存退出
退出后輸入以下命令,激活環境變數,
source ~/.bashrc
輸入以下命令可以進入Miniforge的base環境下:
source activate5.配置pytorch環境
5.1創建虛擬環境
輸入以下命令,其中的“pytorch”為環境名稱,可以根據自己喜好修改,
conda create -n pytorch python=3.6命令運行程序跟使用Anaconda一致,中途輸入y繼續,
安裝完成后輸入,進入pytroch虛擬環境,
conda activate pytorch #再強調一遍pytorch為自己設定的環境名稱
5.2安裝pytorch
依次運行以下命令,torch的下載地址是:PyTorch for Jetson - version 1.10 now available - Jetson Nano - NVIDIA Developer Forums
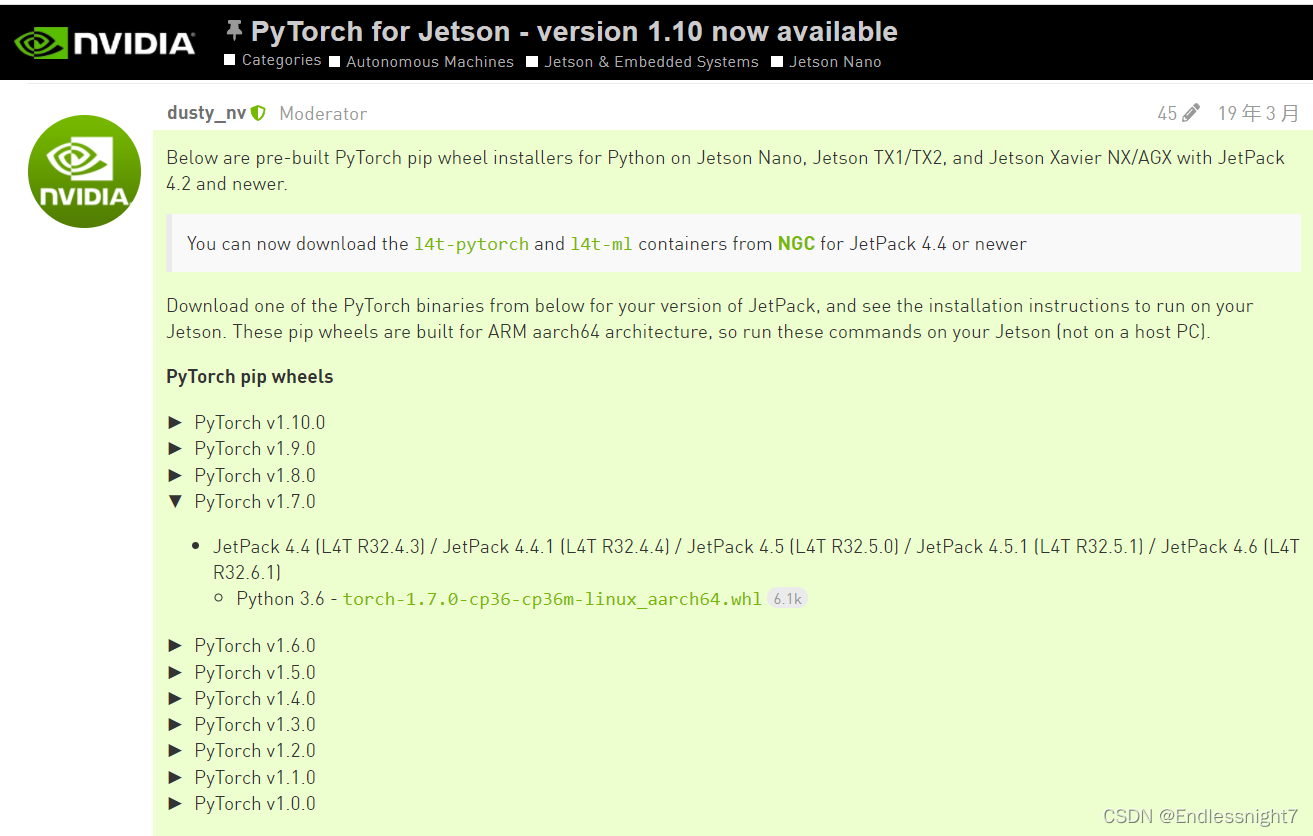
百度網盤鏈接:https://pan.baidu.com/s/1rBoUXE4f2wZtzq6H1Jv6Xg 提取碼:5uo3
sudo apt-get install python3-pip libopenblas-base libopenmpi-dev
pip3 install Cython
pip3 install numpy
pip3 install torch-1.7.0-cp36-cp36m-linux_aarch64.whl
測驗是否安裝成功,輸入python,然后在輸入以下命令,
import torch
print(torch.__version__)
print('CUDA available: ' + str(torch.cuda.is_available()))
a = torch.cuda.FloatTensor(2).zero_()
print('Tensor a = ' + str(a))
b = torch.randn(2).cuda()
print('Tensor b = ' + str(b))
c = a + b
print('Tensor c = ' + str(c))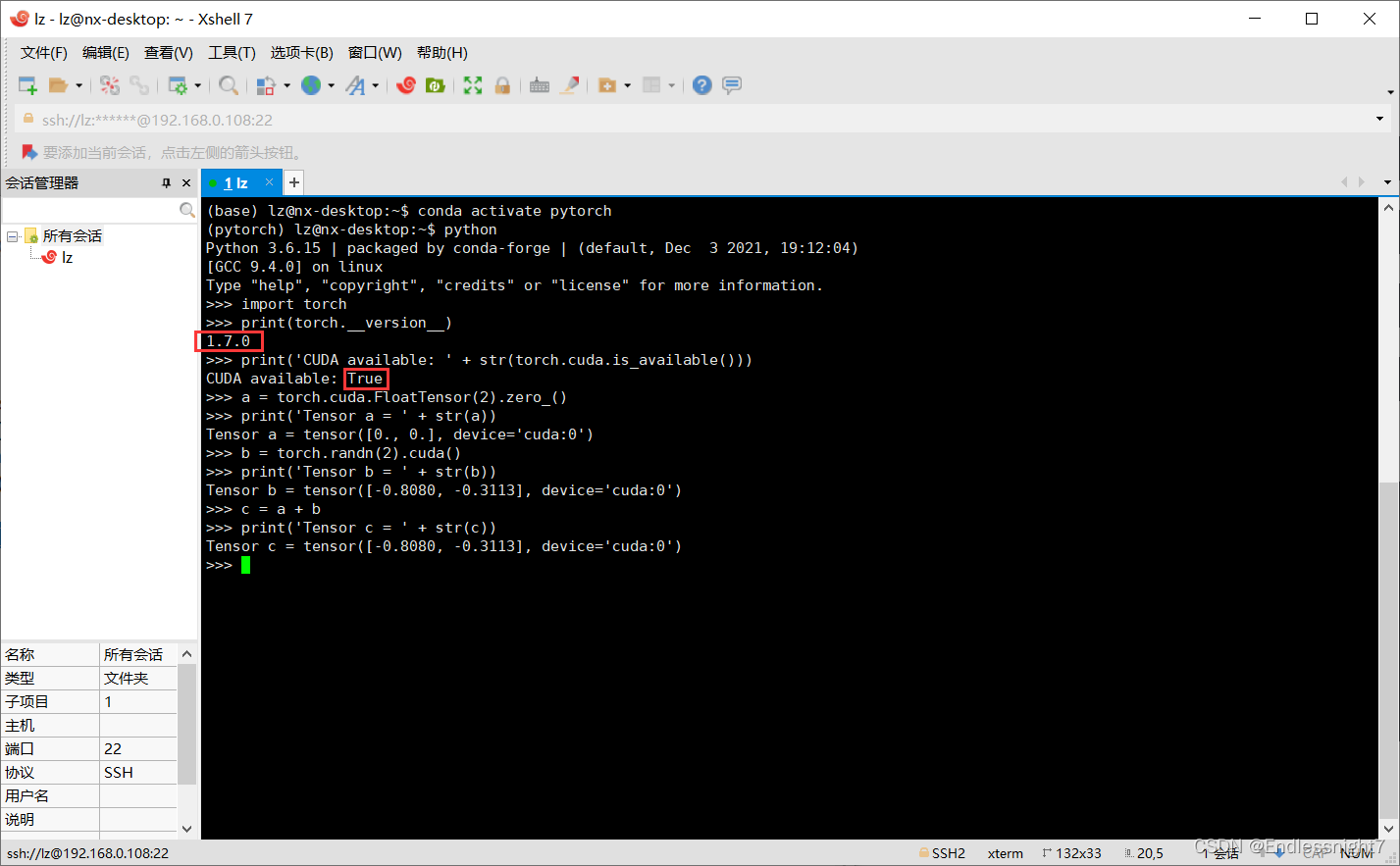
5.3安裝torchvision
上面安裝的pytorch是1.7.0,對應 torchvision 版本是0.8.1,選擇一個檔案夾cd進入,輸入以下命令,檔案將clone到當前檔案夾,
# torch1.7.0--torchvision0.8.1
git clone --branch v0.8.1 https://github.com/pytorch/vision torchvision
# 網不好的話使用下面的命令進行進行clone
git clone --branch v0.8.1 https://gitee.com/rchen1997/torchvision torchvision下載成功后, cd進入torchvision,輸入以下命令,
export BUILD_VERSION=0.8.1
sudo python3 setup.py install
如果出現下圖的錯誤,對setup.py檔案進行修改一下,輸入以下命令:
vim setup.py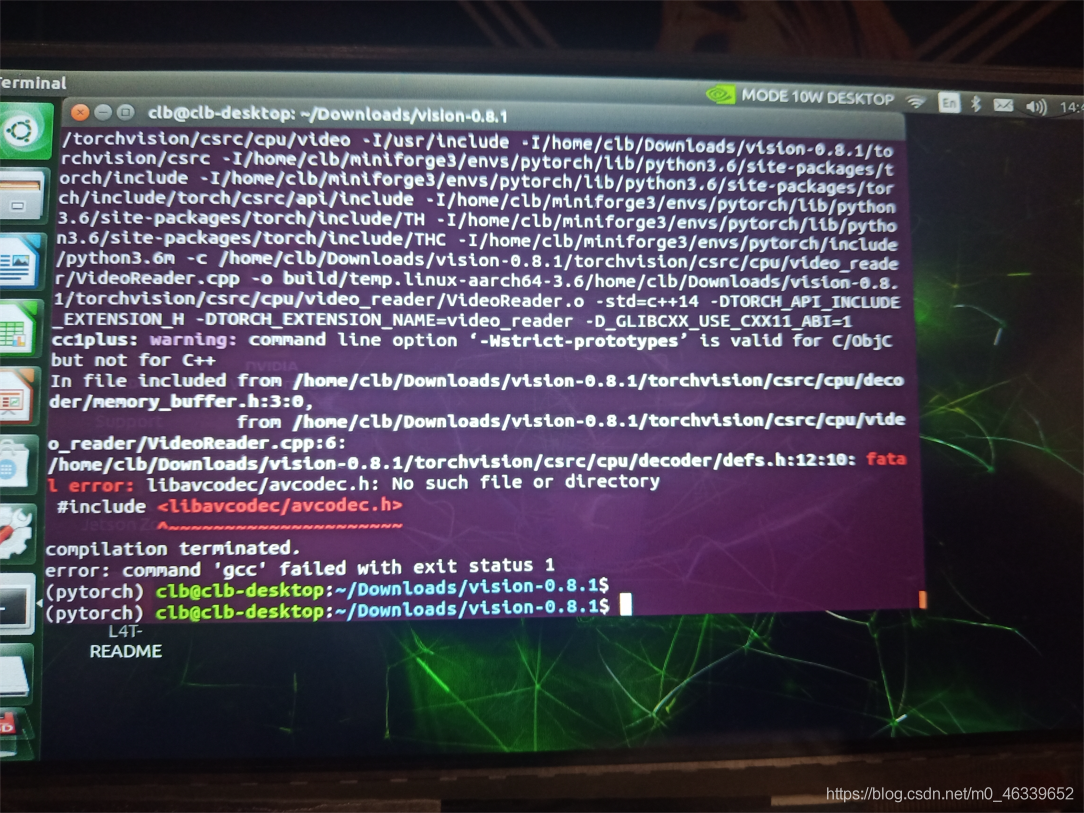 找到 if has ffmpeg,修改后保存退出
找到 if has ffmpeg,修改后保存退出
if has ffmpeg 改為 if False
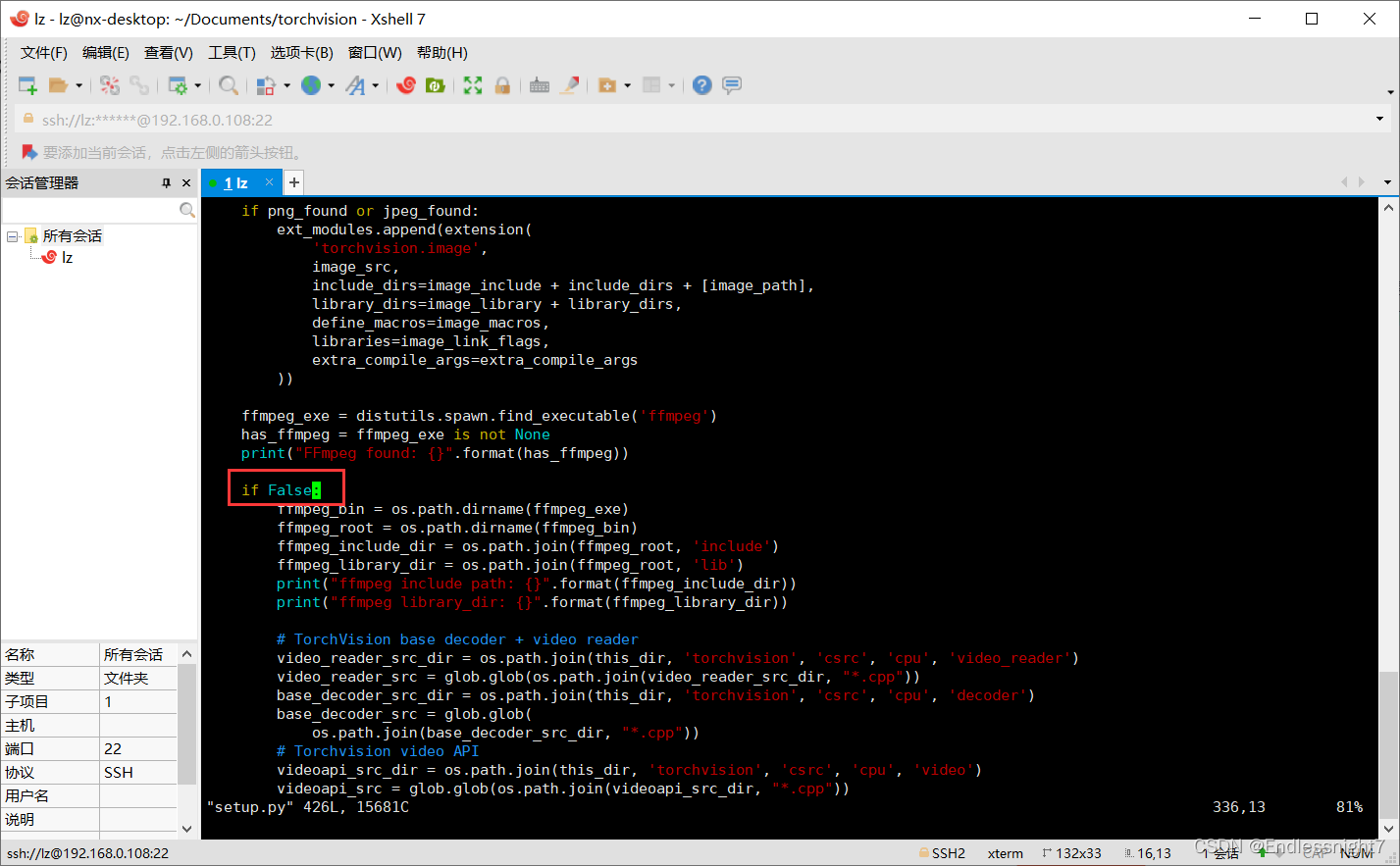
然后再次執行命令:(其實命令也不用那么嚴謹,python setup.py install照樣能運行)
sudo python3 setup.py install在這里非常感謝Geek L 的分享,讓我的問題得以解決,Nvidia Jetson XAvier NX開發套件從裝機到pytorch環境搭建YoloV5+DeepSort+TensorRT_m0_46339652的博客-CSDN博客_jetson nx yolov5目錄1. 刷機與裝機1.1 準備VMware作業站和linux的unbuntu16.04虛擬機:2.將SD上的系統移動至SSD3. SSH配置4. 查看Jetpack版本2. 深度學習環境配置2.1 python環境配置2.1.1 安裝Miniforge(Conda的Arm代替版)2.2 配置Miniforge——偽conda環境2.3 pytorch環境配置2.3.1 查看cuda版本2.2 pytorch虛擬環境創建2.2 安裝pytorch-gp2.3 安裝torchvision二級目錄三級目錄1.https://blog.csdn.net/m0_46339652/article/details/119875117?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522164406519016780274194697%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=164406519016780274194697&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v31_ecpm-1-119875117.pc_search_insert_ulrmf&utm_term=jetson+nx+xavier%E8%BF%90%E8%A1%8Cyolov5&spm=1018.2226.3001.4187
三、運行yolov5
在運行yolov5之前,也需要安裝其所需要的包,具體按照requirements.txt安裝即可,我將我安裝的命令下在下面:
pip install opencv-python==4.1.2
pip install tqdm==4.41.0
pip install Pillow==7.1.2
pip install PyYAML==5.3.1
pip install requests==2.23.0
pip install scipy==1.4.1
pip install pandas==1.1.4
pip install seaborn==0.11.0 #安裝時附帶安裝matplotlib,直接安裝matplotlib不成功,玄學了
pip install scikit-build==0.11.1
pip install thop
pip install pycocotools==2.0.4我安裝matplotlib的時候一直失敗,就先安裝了其他包,沒想到安裝seaborn的時候附帶將matplotlib裝上了,大家安裝的時候可以先安裝seaborn試試,
conda list # 可以查看已安裝的包所有包安裝完成后,進入yolov5檔案夾,輸入以下命令,測驗是否能成功運行,
python detect.py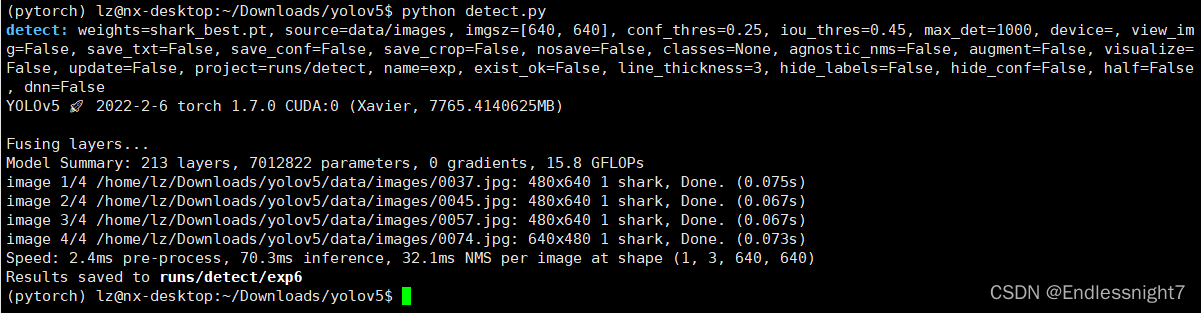
該博客是我配置完環境后寫的,可能有些地方寫的不好,日后想起來會進行補充,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/423600.html
標籤:AI