系列文章目錄
文章目錄
- 系列文章目錄
- 前言
- 一、原理
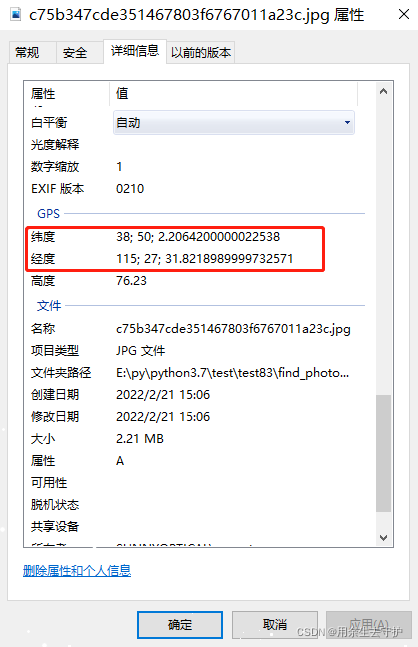
- 1.圖片必須具有經緯度資訊
- 2.經緯度格式轉換
- 2.1 GPS點坐標的兩種表示方式(誤差還是有的)
- 2.1.1 十進制換度分秒
- 2.1.2 度分秒換十進制
- 2.1.3 實際距離換算
- 3.根據經緯度定位
- 二、python呼叫高德API進行圖片定位
- 1.main.py原始碼
- 2.position_utils.py原始碼
- 總結
前言
一、原理
1.圖片必須具有經緯度資訊
2.經緯度格式轉換
2.1 GPS點坐標的兩種表示方式(誤差還是有的)
2.1.1 十進制換度分秒
例:經緯度115.46513298108795,38.83474699749353

2.1.2 度分秒換十進制

2.1.3 實際距離換算
參考文章鏈接
地球子午線長是39940.67公里,緯度改變一度合110.94公里,一分合1.849公里,一秒合30.8米,赤道圈是40075.36公里,北京地區緯在北緯40度左右,緯度圈長為40075*sin(90-40),此地經度一度合276公里,一分合1.42公里一秒合23.69米,
地球赤道上環繞地球一周走一圈共 40075.04公里,而這一圈分成360,而每1°(度)有60’,每一度一秒在赤道上的長度計算如下:
40075.04km/360°=111.31955km
111.31955km/60’=1.8553258km=1855.3m
而每一分又有60秒,每一秒就代表 1855.3m/60=30.92m
任意兩點距離計算公式為:
d=111.12cos{1/[sinΦAsinΦB十 cosΦAcosΦBcos(λB—λA)]}
其中:
A點經度,緯度分別為λA和ΦA,
B點經度、緯度分別為λB和ΦB,
d為距離,
結論:
1°經度差對應的東西方向的距離是與其緯度有密切關系的,
赤道上經度相差1°對應的弧長大約是111千米
具體資料如下:
緯度 1°經度差對應的東西距離
20° 104公里
26° 100公里
30° 96公里
36° 90公里
40° 85公里
44° 80公里
51° 70公里
1、經緯度在不同地區,每度距離差是不同的,如果假定地球是完美的球體(這樣假設誤差不是很大)的話,緯度為 B 的地區:
緯度變化一度,球面南北方向距離變化:πR/180 …111.7km
經度變化一度,球面東西方向距離變化:πR/180cosB …111.7cosB
比如北京 B = 40、cosB = 0.766,經度變化1度,則東西方向距離變化 85.567km
**2、**不同經度不一樣,在南極、北級,所有的經度線都匯集在南、北極的點上,經度之間的距離為0,在赤道,經度之間的距離最大,
經度變化一度,球面東西方向距離變化:πR/180cosB …111.7cosB (R為地球半徑,B為緯度)
緯度之間的距離是一樣的,緯度變化一度,球面南北方向距離變化:πR/180 …111.7km (R為地球半徑)
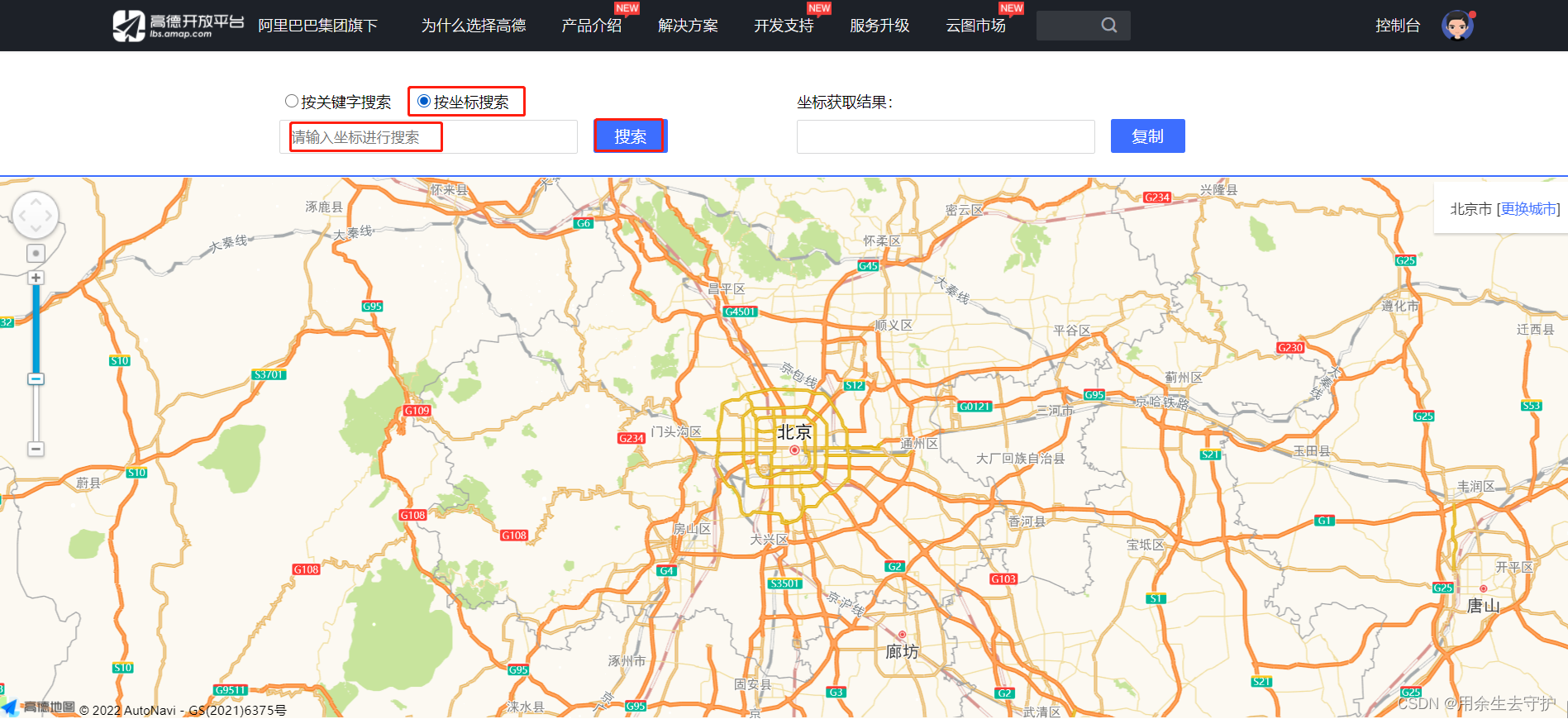
3.根據經緯度定位
高德坐標拾取
百度坐標拾取
二、python呼叫高德API進行圖片定位
1.main.py原始碼
代碼如下(示例):
import os
import exifread
from decimal import Decimal
from position_utils import *
import requests
import json
import datetime
# pip3 install exifread
class Location(object):
def __init__(self, image_path):
self.img_path = image_path
self.api_key = "4e8d619c69859ce0f8962de9297c3764" #申請的高德APP web KEY
#self.api_key = "4f458eaded9bad93b63b8a2c67f5c0e0" #申請的高德APP web KEY
self.url_get_position = 'https://restapi.amap.com/v3/geocode/regeo?key={}&location={}'
def run(self):
coordinate = self.__get_image_ability()
print(f'獲取到經度、緯度是:{coordinate}')
if not coordinate:
return
# 根據經度和緯度,獲取到詳細地址
address = self.__get_address(coordinate)
# 檢驗坐標值
# https://lbs.amap.com/console/show/picker
print(f'他當前位置在:{address}')
def __get_address(self, location):
"""
根據坐標得到詳細地址
:param location: 經緯度值
:return:
"""
resp = requests.get(self.url_get_position.format(self.api_key, location))
location_data = json.loads(resp.text)
address = location_data.get('regeocode').get('formatted_address')
return address
def __format_lati_long_data(self, data):
"""
對經度和緯度資料做處理,保留6位小數
:param data: 原始經度和緯度值
:return:
"""
# 洗掉左右括號和空格
data_list_tmp = str(data).replace('[', '').replace(']', '').split(',')
data_list = [data.strip() for data in data_list_tmp]
# 替換秒的值
data_tmp = data_list[-1].split('/')
# 秒的值
data_sec = int(data_tmp[0]) / int(data_tmp[1]) / 3600
# 替換分的值
data_tmp = data_list[-2]
# 分的值
data_minute = int(data_tmp) / 60
# 度的值
data_degree = int(data_list[0])
# 由于高德API只能識別到小數點后的6位
# 需要轉換為浮點數,并保留為6位小數
result = "%.6f" % (data_degree + data_minute + data_sec)
return float(result)
def __get_image_ability(self):
"""
獲取圖片的屬性值,包含:經緯度、拍攝時間等
:param picture_name:
:return:
"""
# 利用exifread庫,讀取圖片的屬性
img_exif = exifread.process_file(open(self.img_path, 'rb'))
# 能夠讀取到屬性
if img_exif:
# 緯度數
latitude_gps = img_exif['GPS GPSLatitude']
# N,S 南北緯方向
latitude_direction = img_exif['GPS GPSLatitudeRef']
# 經度數
longitude_gps = img_exif['GPS GPSLongitude']
# E,W 東西經方向
longitude_direction = img_exif['GPS GPSLongitudeRef']
# 拍攝時間
take_time = img_exif['EXIF DateTimeOriginal']
is_lie = self.judge_time_met(take_time)
if is_lie:
print('很遺憾的通知你,他/她在撒謊!!!照片不是今天拍的')
return
# 緯度、經度、拍攝時間
if latitude_gps and longitude_gps and take_time:
# 對緯度、經度值原始值作進一步的處理
latitude = self.__format_lati_long_data(latitude_gps)
longitude = self.__format_lati_long_data(longitude_gps)
# print(f'{longitude},{latitude}')
# 注意:由于gps獲取的坐標在國內高德等主流地圖上逆編碼不夠精確,這里需要轉換為火星坐標系
location = wgs84togcj02(longitude, latitude)
return f'{location[0]},{location[1]}'
else:
print(f'獲取的圖片資料屬性不完整')
return ''
else:
print('抱歉,圖片不是原圖,沒法獲取到圖片屬性,')
return ''
def judge_time_met(self, take_time):
"""
通知拍攝時間判斷女朋友是否撒謊
:param take_time:
:return:
"""
# 拍攝時間
format_time = str(take_time).split(" ")[0].replace(":", "-")
print('照片拍攝日期是:')
print(format_time)
# 當天日期 驗證照片是否是當日拍攝
# today = str(datetime.date.today())
# if format_time == today:
# return False
# else:
# return True
if __name__ == '__main__':
# 女朋友發過來的圖片【原圖】 #圖片命名容易沖突,更換開頭就可以
location = Location('./aec0cddf45a946dec358301ddf17982.jpg')
# 找到女朋友的地理位置
location.run()
2.position_utils.py原始碼
代碼如下(坐標轉換示例):
# -*- coding: utf-8 -*-
import json
import math
x_pi = 3.14159265358979324 * 3000.0 / 180.0
pi = 3.1415926535897932384626 # π
a = 6378245.0 # 長半軸
ee = 0.00669342162296594323 # 扁率
def wgs84togcj02(lng, lat):
"""
WGS84轉GCJ02(火星坐標系)
:param lng:WGS84坐標系的經度
:param lat:WGS84坐標系的緯度
:return:
"""
if out_of_china(lng, lat): # 判斷是否在國內
return lng, lat
dlat = transformlat(lng - 105.0, lat - 35.0)
dlng = transformlng(lng - 105.0, lat - 35.0)
radlat = lat / 180.0 * pi
magic = math.sin(radlat)
magic = 1 - ee * magic * magic
sqrtmagic = math.sqrt(magic)
dlat = (dlat * 180.0) / ((a * (1 - ee)) / (magic * sqrtmagic) * pi)
dlng = (dlng * 180.0) / (a / sqrtmagic * math.cos(radlat) * pi)
mglat = lat + dlat
mglng = lng + dlng
return [mglng, mglat]
def gcj02towgs84(lng, lat):
"""
GCJ02(火星坐標系)轉GPS84
:param lng:火星坐標系的經度
:param lat:火星坐標系緯度
:return:
"""
if out_of_china(lng, lat):
return lng, lat
dlat = transformlat(lng - 105.0, lat - 35.0)
dlng = transformlng(lng - 105.0, lat - 35.0)
radlat = lat / 180.0 * pi
magic = math.sin(radlat)
magic = 1 - ee * magic * magic
sqrtmagic = math.sqrt(magic)
dlat = (dlat * 180.0) / ((a * (1 - ee)) / (magic * sqrtmagic) * pi)
dlng = (dlng * 180.0) / (a / sqrtmagic * math.cos(radlat) * pi)
mglat = lat + dlat
mglng = lng + dlng
return [lng * 2 - mglng, lat * 2 - mglat]
def transformlat(lng, lat):
ret = -100.0 + 2.0 * lng + 3.0 * lat + 0.2 * lat * lat + \
0.1 * lng * lat + 0.2 * math.sqrt(math.fabs(lng))
ret += (20.0 * math.sin(6.0 * lng * pi) + 20.0 *
math.sin(2.0 * lng * pi)) * 2.0 / 3.0
ret += (20.0 * math.sin(lat * pi) + 40.0 *
math.sin(lat / 3.0 * pi)) * 2.0 / 3.0
ret += (160.0 * math.sin(lat / 12.0 * pi) + 320 *
math.sin(lat * pi / 30.0)) * 2.0 / 3.0
return ret
def transformlng(lng, lat):
ret = 300.0 + lng + 2.0 * lat + 0.1 * lng * lng + \
0.1 * lng * lat + 0.1 * math.sqrt(math.fabs(lng))
ret += (20.0 * math.sin(6.0 * lng * pi) + 20.0 *
math.sin(2.0 * lng * pi)) * 2.0 / 3.0
ret += (20.0 * math.sin(lng * pi) + 40.0 *
math.sin(lng / 3.0 * pi)) * 2.0 / 3.0
ret += (150.0 * math.sin(lng / 12.0 * pi) + 300.0 *
math.sin(lng / 30.0 * pi)) * 2.0 / 3.0
return ret
def out_of_china(lng, lat):
"""
判斷是否在國內,不在國內不做偏移
:param lng:
:param lat:
:return:
"""
if lng < 72.004 or lng > 137.8347:
return True
if lat < 0.8293 or lat > 55.8271:
return True
return False
將需要定位的圖片放到指定路徑下,運行main.py
運行結果:
照片拍攝日期是:
2021-10-22
獲取到經度、緯度是:115.46513298108795,38.83474699749353
他當前位置在:河北省保定市蓮池區南大園鄉朝陽南大街2166號長城家園南區
運行截圖展示:

總結
分享:
內心有故事的人,都怕受傷,思維夠快的人,都能有一種隱藏,不是看缺點就能躲避,不是看優點就能走近,而是掌握尺度,分析別人,駕馭自己,才能更好的對待未來,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/431045.html
標籤:AI