Day0
第一步:創建Notebook模型任務
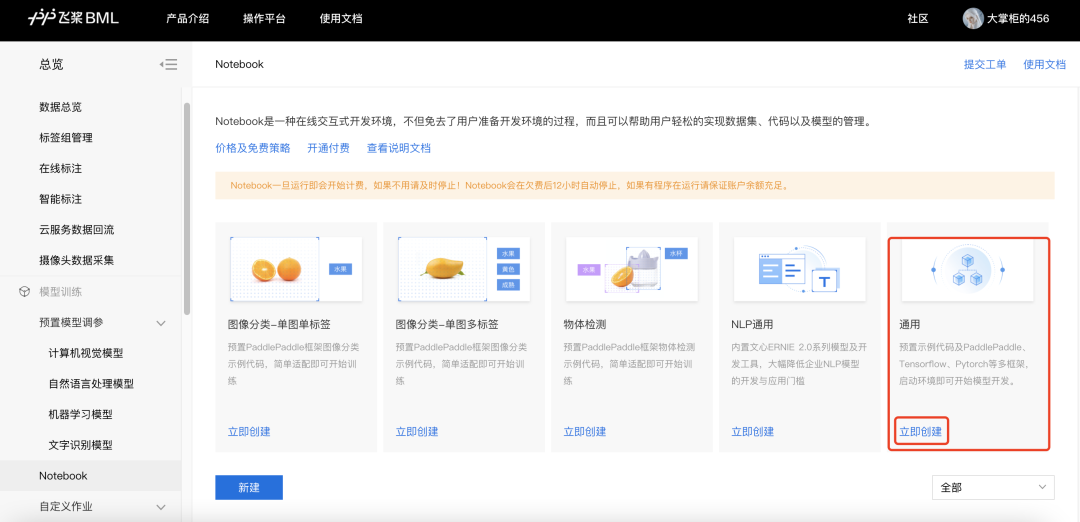
**step1:**進入BML主頁,點擊立即使用
🔗:https://ai.baidu.com/bml/

**step2:**點擊Notebook,創建“通用任務”
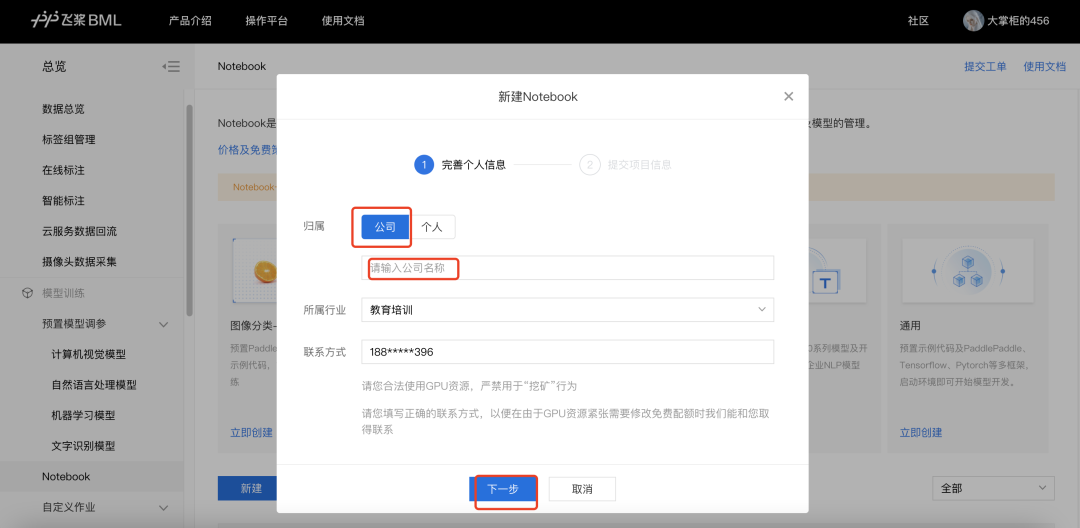
**step3:**填寫任務資訊,注意這里的資訊要填寫您所在的企業資訊,即歸屬要選擇公司,并輸入您自身所在的公司全稱,如果您還在上學,請輸入學校全稱,既不是企業員工也不是學生,歸屬才能選擇個人,
第二步:下載資料集并解壓
操作模板下載鏈接:https://aistudio.baidu.com/aistudio/datasetdetail/129626

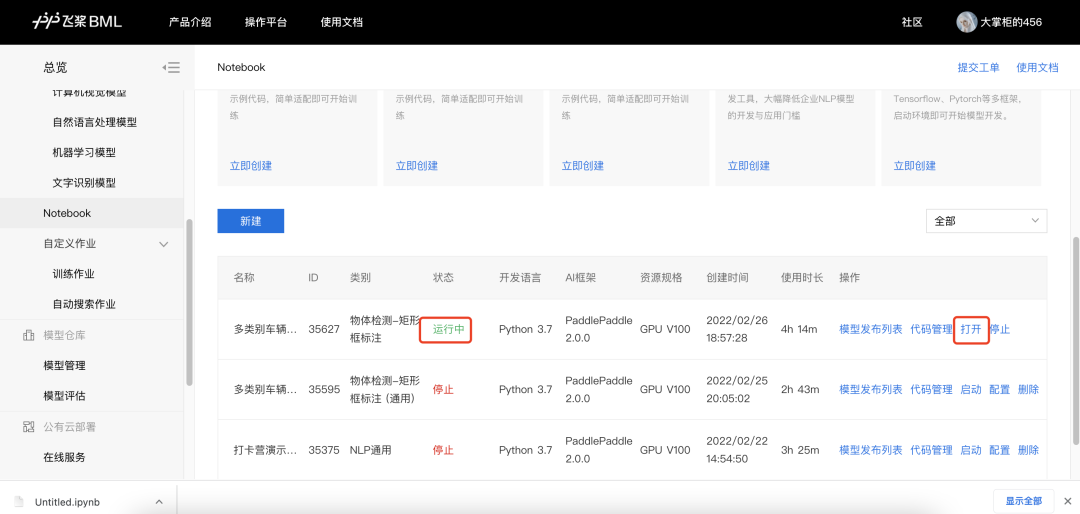
1.點擊創建好的notebook任務右側的配置
- 開發語言:Python3.7
- AI框架:PaddlePaddle2.0.0
- 資源規格:GPU V100(限時免費,注意時間)
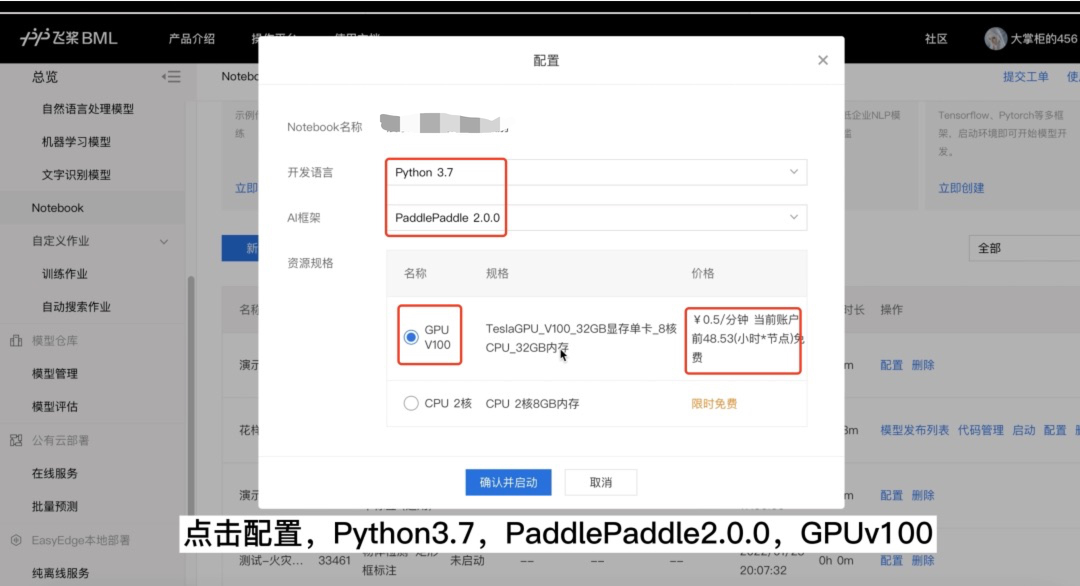
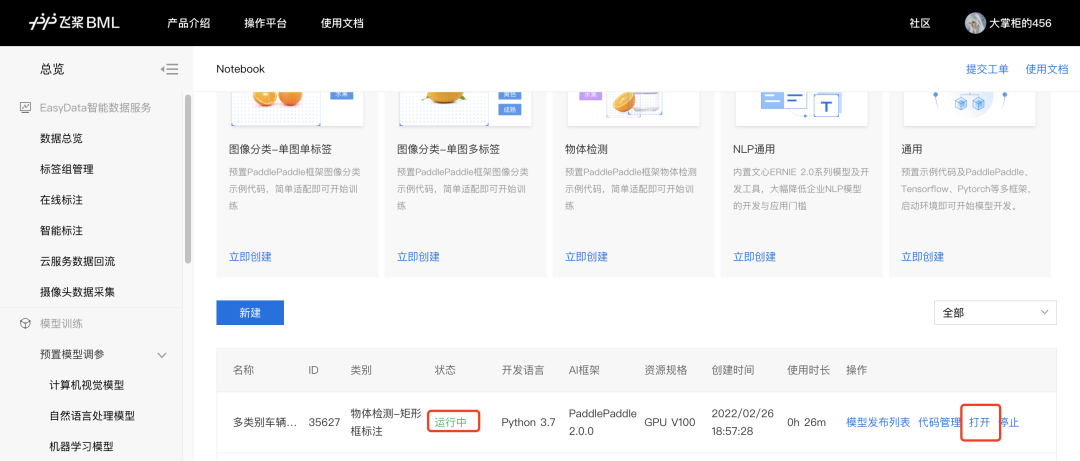
2.啟動運行并打開
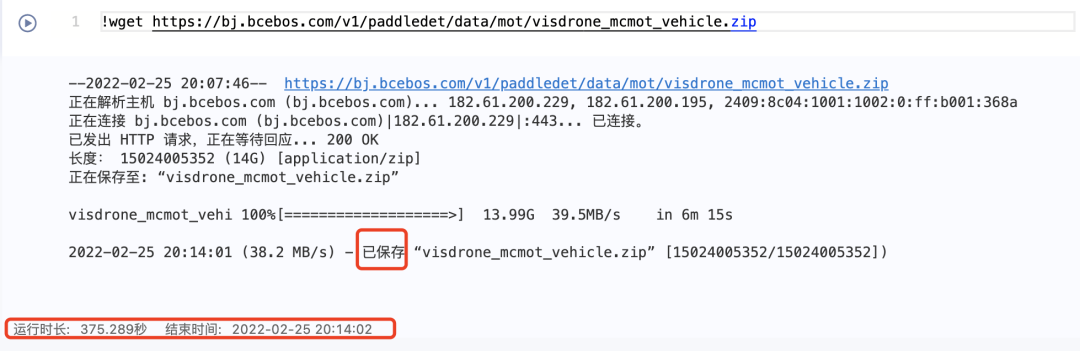
3.上傳下載的操作模板,上傳后點擊打開,然后運行第一步下載資料集
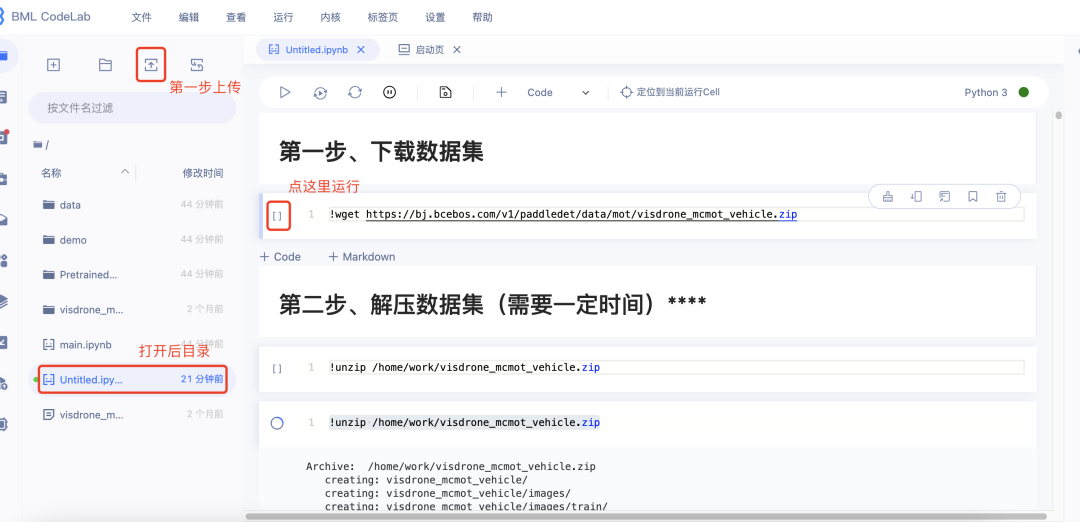
運行結束的顯示如下圖
4.下載完成后運行第二步解壓資料集
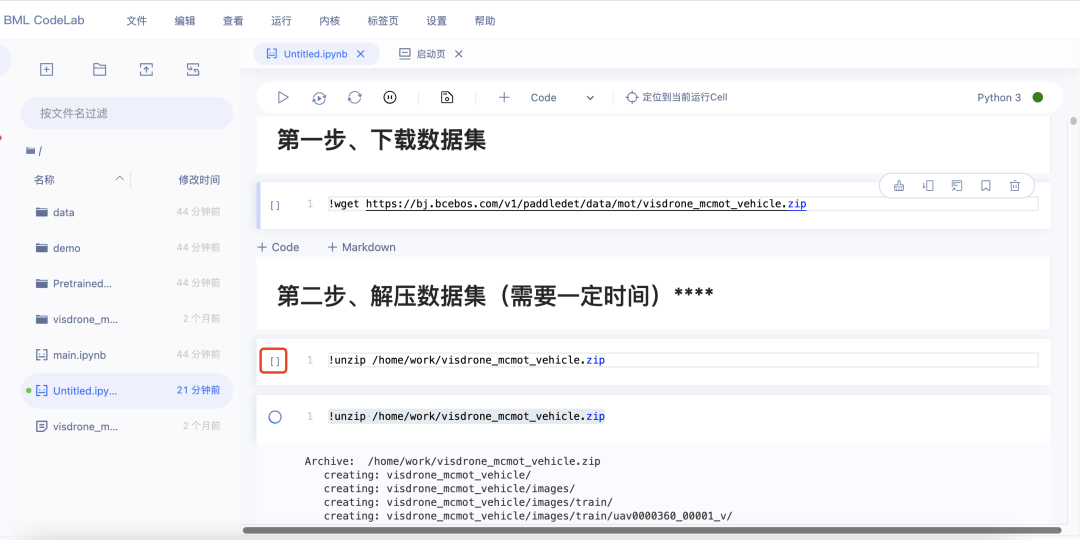
因為解壓時顯示的內容較長,翻頁不方便,可以點擊此處進行折疊
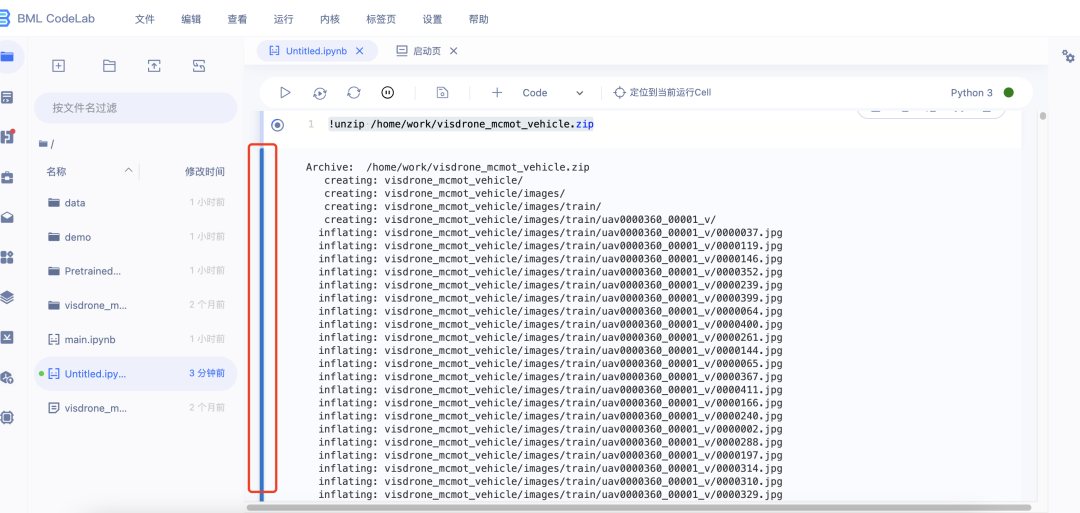
解壓完成的顯示如下圖
Day1
1.打開Notebook

2.在第三步下方的代碼框里復制粘貼安裝PaddleDetection的代碼,然后運行,如果出現unable to access說明網不好,可以重新運行或者切換網路
下載PaddleDetection的代碼:
!git clone https://github.com/PaddlePaddle/PaddleDetection.git -b develop

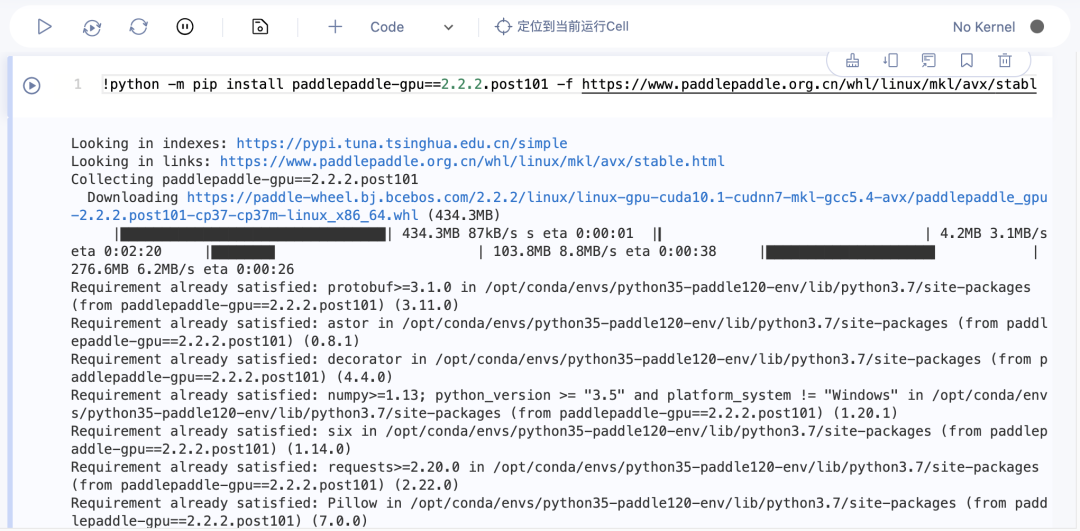
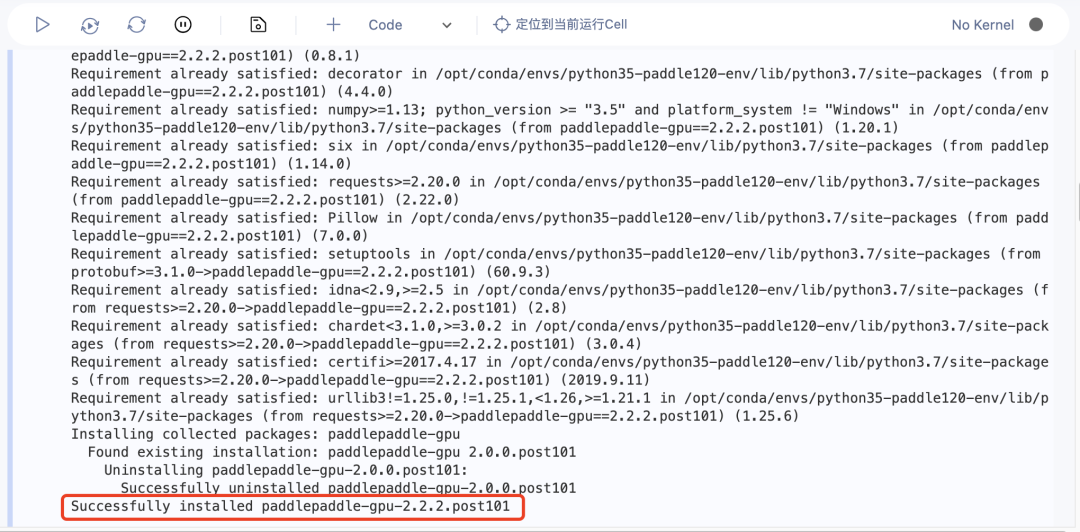
3.安裝完成后,點擊+Code新增代碼框,復制粘貼升級PaddlePaddle的代碼,然后運行
升級PaddlePaddle的代碼:
!python -m pip install paddlepaddle-gpu==2.1.3.post101 -f https://www.paddlepaddle.org.cn/whl/linux/mkl/avx/stable.html

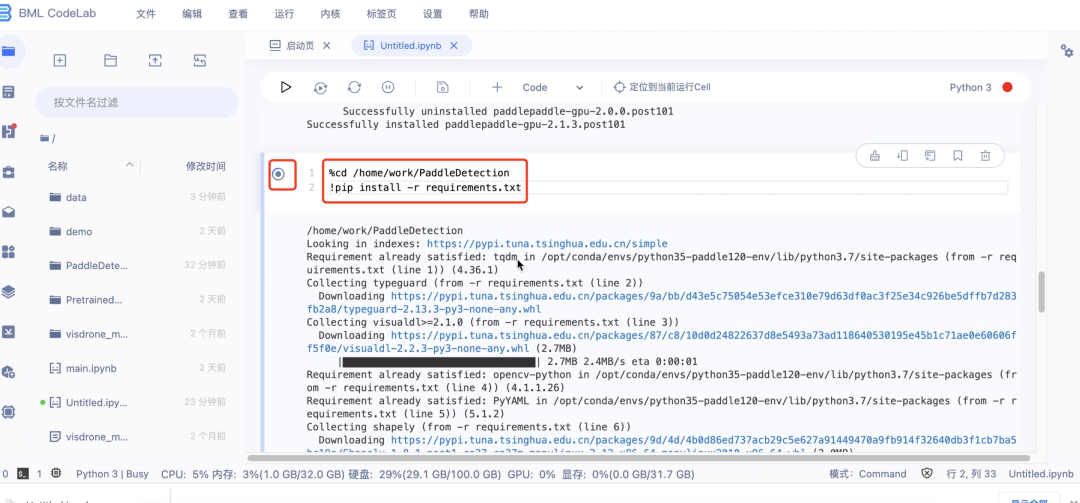
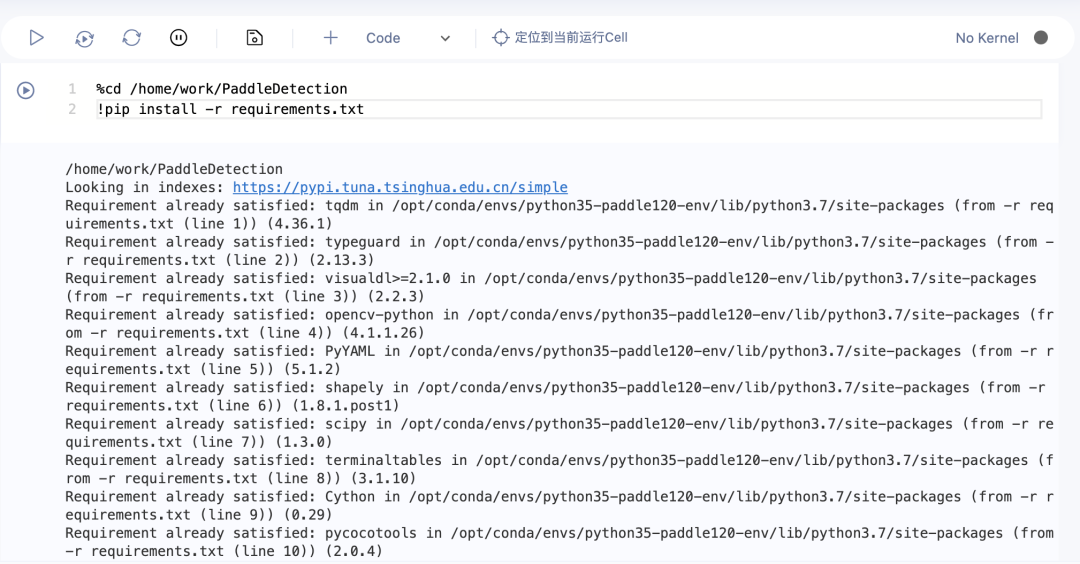
4.升級完成后,再次點擊+Code,復制粘貼安裝環境依賴的代碼,然后運行
安裝環境依賴的代碼:
%cd /home/work/PaddleDetection
!pip install -r requirements.txt
5.以上任務完成后記得保存并停止運行Notebook,避免浪費免費算力資源
記得截圖最后一步操作界面發送至群中完成打卡
打卡截圖示例:
Day2
今日的任務是模型訓練與評估,有兩種方法,請務必把兩種方法都了解之后選擇其中一種進行操作,
方法一:
1.啟動運行并打開Notebook
2.重新升級PaddlePpaddle,僅需把原本代碼中的2.1.3改為2.2.2,然后重新運行即可**
**
修改后代碼:
!python -m pip install paddlepaddle-gpu==2.2.2.post101 -f https://www.paddlepaddle.org.cn/whl/linux/mkl/avx/stable.html
運行完成頁面如下圖
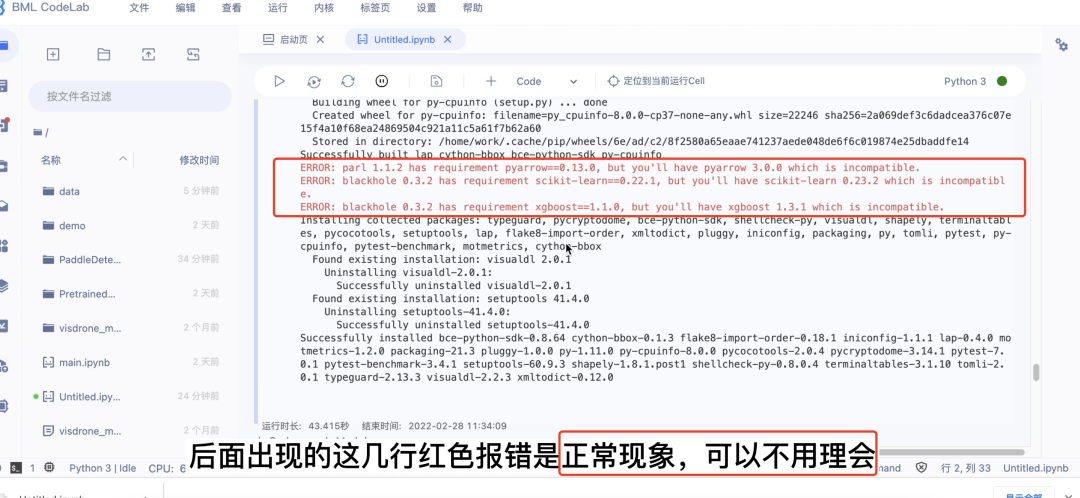
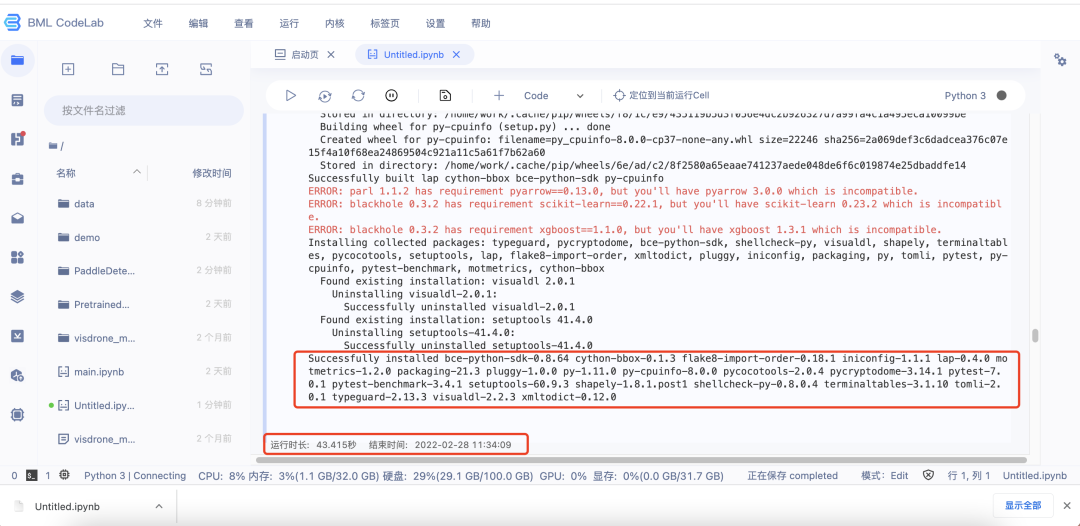
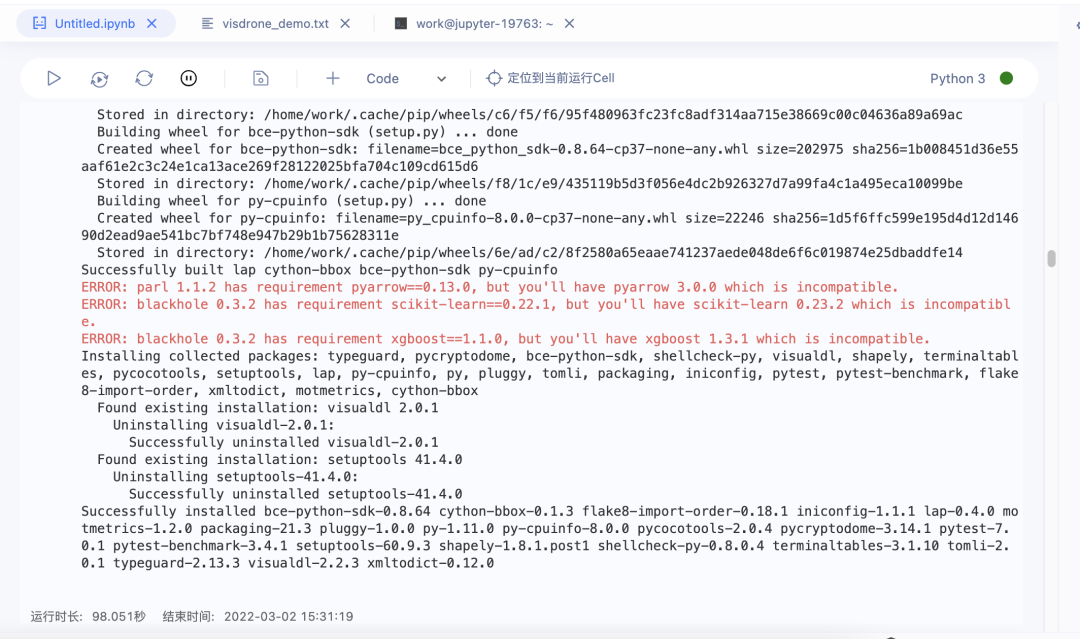
3.重新安裝環境依賴,注意,每次重新啟動打開Notebook都需要重新安裝環境依賴
運行完成頁面如下圖

4.組態檔路徑
點開PaddleDetection-dataset-mot檔案夾,然后右鍵自行新建兩個檔案夾,分別命名為:image_lists和visdrone_mcmot_vehicle


然后點開資料集檔案夾(visdrone_mcmot_vehicle),把visdrone_mcmot_vehicle.train和visdrone_mcmot_vehicle.val兩個檔案復制到剛剛創建的PaddleDetection-dataset-mot-image_lists中,再把資料集檔案夾中剩下的六個檔案復制(剪切)到剛剛創建的visdrone_mcmot_vehicle中

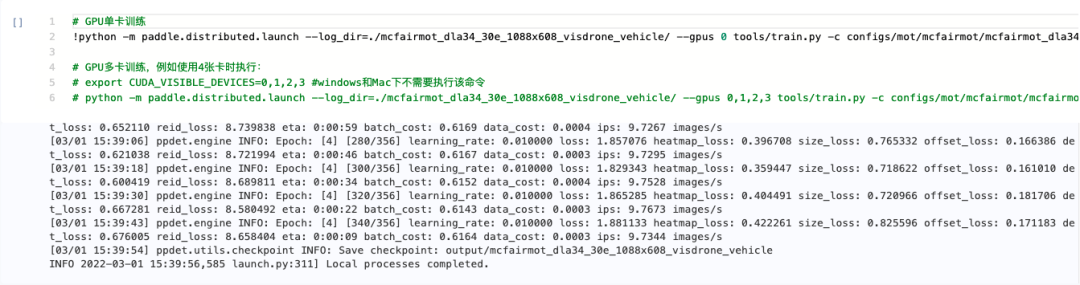
5.模型訓練
代碼:!python -m paddle.distributed.launch --log_dir=./mcfairmot_dla34_30e_1088x608_visdrone_vehicle/ --gpus 0 tools/train.py -c configs/mot/mcfairmot/mcfairmot_dla34_30e_1088x608_visdrone_vehicle_bytetracker.yml
因為訓練的是全量資料,所以訓練時間可能會較長,可以自行查看每段運行代碼的后半部分,eta:后面的時間即為剩余訓練時長,如較長可選擇方法二

運行完成頁面如下圖:
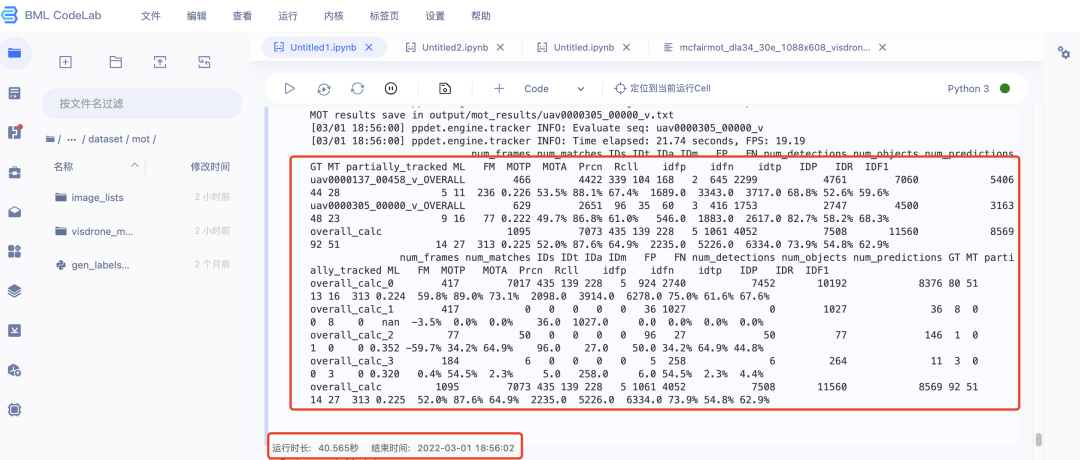
6.模型評估
代碼:!CUDA_VISIBLE_DEVICES=0 python tools/eval_mot.py -c configs/mot/mcfairmot/mcfairmot_dla34_30e_1088x608_visdrone_vehicle.yml -o weights=output/mcfairmot_dla34_30e_1088x608_visdrone_vehicle/model_final.pdparams
運行完成頁面如下圖:

方法二:
方法二是把PaddleDetection更換為已經整理好代碼檔案的版本,因此不用配置資料集路徑,比方法一簡單一些,
可以創建一個新的Notebook任務(創建方法見day0操作教程前半部分),然后從本方法的第三步開始操作,
也可以不創建新的Notebook任務,從本方法的第一步開始做,但是需要先洗掉之前下載好的PaddleDetection和資料集,否則影響操作,
1.啟動運行并打開Notebook
2.檔案-新建啟動頁-Notebook
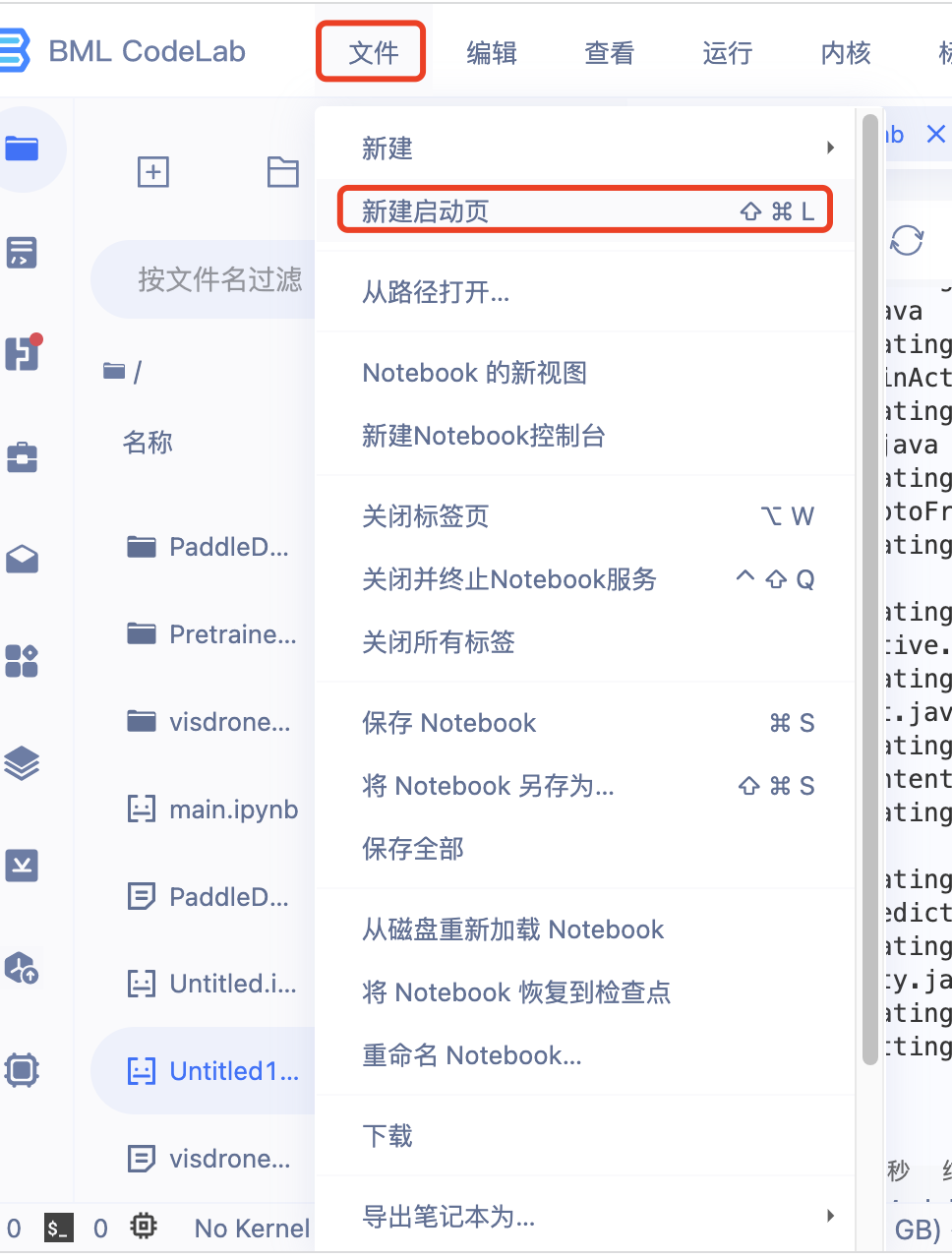

自行點擊+Code添加代碼框,想要添加注釋可以自行點擊+Markdown

3.升級PaddlePpaddle
升級代碼:
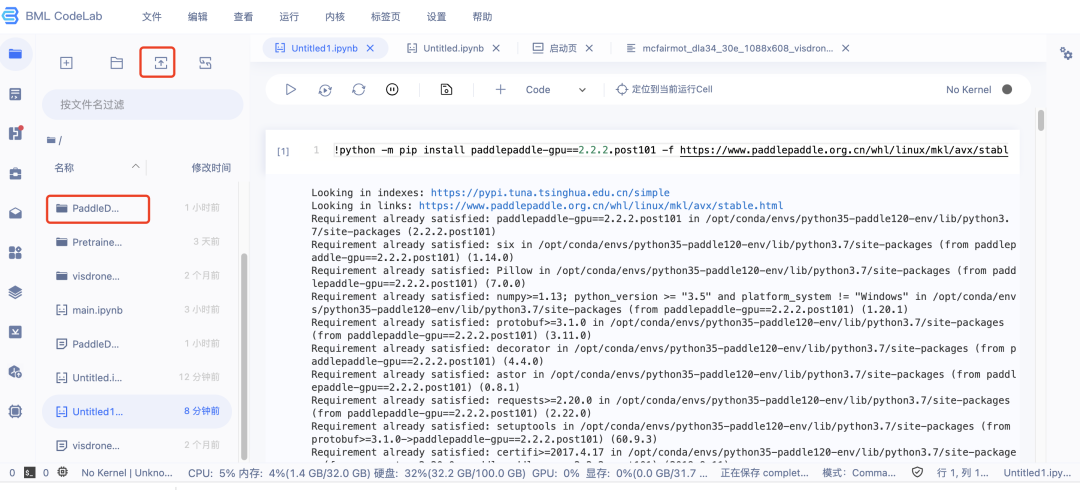
!python -m pip install paddlepaddle-gpu==2.2.2.post101 -f https://www.paddlepaddle.org.cn/whl/linux/mkl/avx/stable.html
運行完成頁面如下圖:
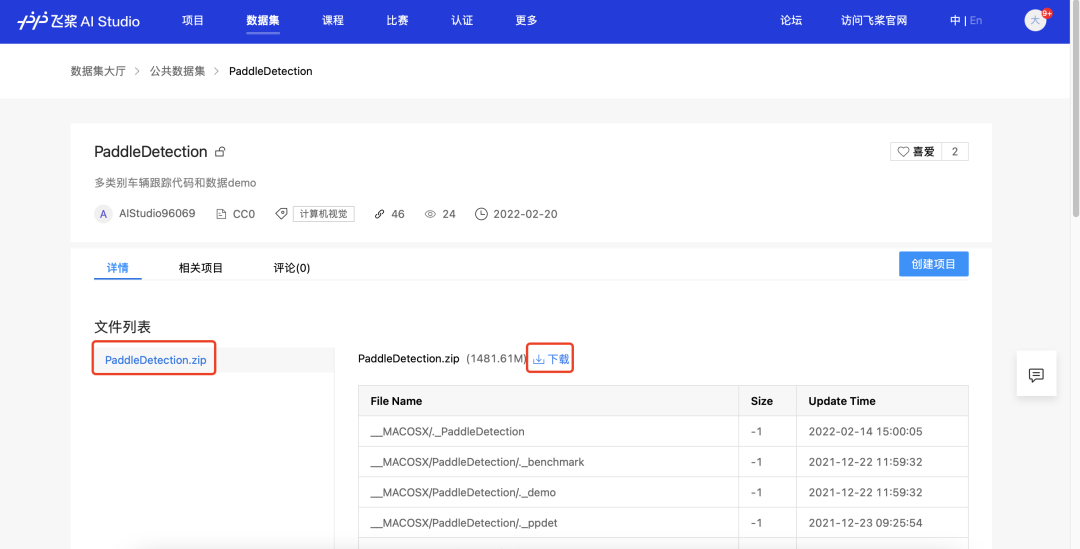
4.下載新的PaddleDetection檔案,上傳壓縮包至Notebook
下載鏈接:https://aistudio.baidu.com/aistudio/datasetdetail/128844
5.解壓PaddleDetection
解壓代碼:!unzip /home/work/PaddleDetection.zip
運行完成頁面如下圖
6.安裝環境依賴:
代碼:%cd /home/work/PaddleDetection
!pip install -r requirements.txt
運行完成頁面如下圖:
7.模型訓練
代碼:
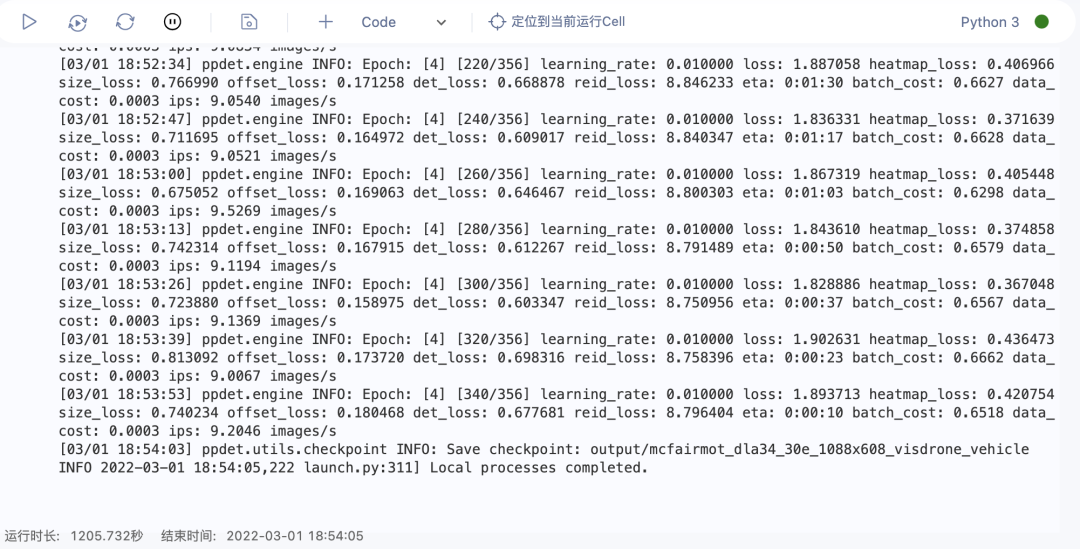
!python -m paddle.distributed.launch --log_dir=./mcfairmot_dla34_30e_1088x608_visdrone_vehicle/ --gpus 0 tools/train.py -c configs/mot/mcfairmot/mcfairmot_dla34_30e_1088x608_visdrone_vehicle.yml
因為這個PaddleDetection是整理過的,資料量較小,epoch(訓練輪數)也較小,所以訓練時間較短,(相應的,精度可能比不上方法一)
運行完成頁面如下圖:
8.模型評估
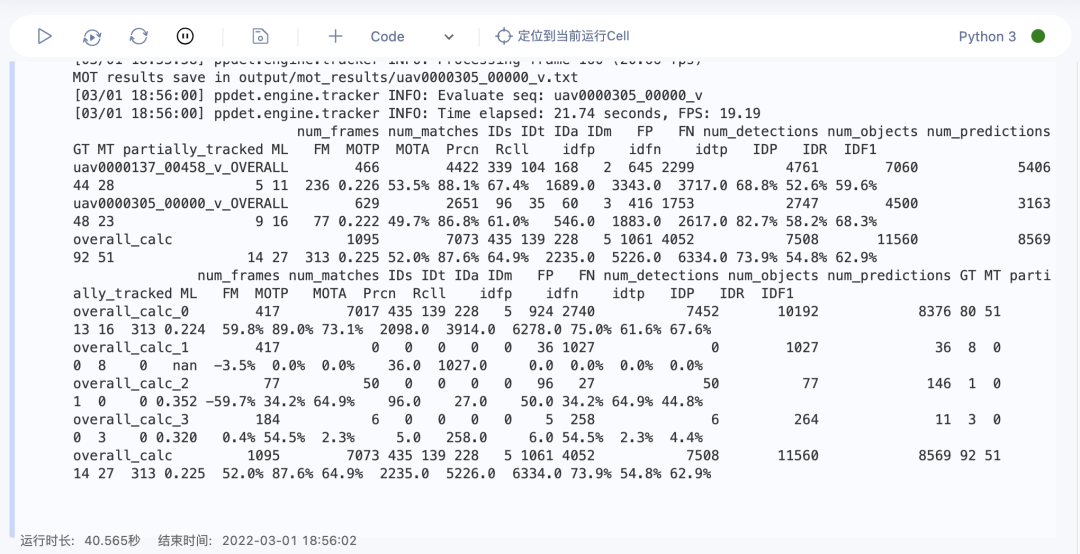
代碼:!CUDA_VISIBLE_DEVICES=0 python tools/eval_mot.py -c configs/mot/mcfairmot/mcfairmot_dla34_30e_1088x608_visdrone_vehicle.yml -o weights=output/mcfairmot_dla34_30e_1088x608_visdrone_vehicle/model_final.pdparams
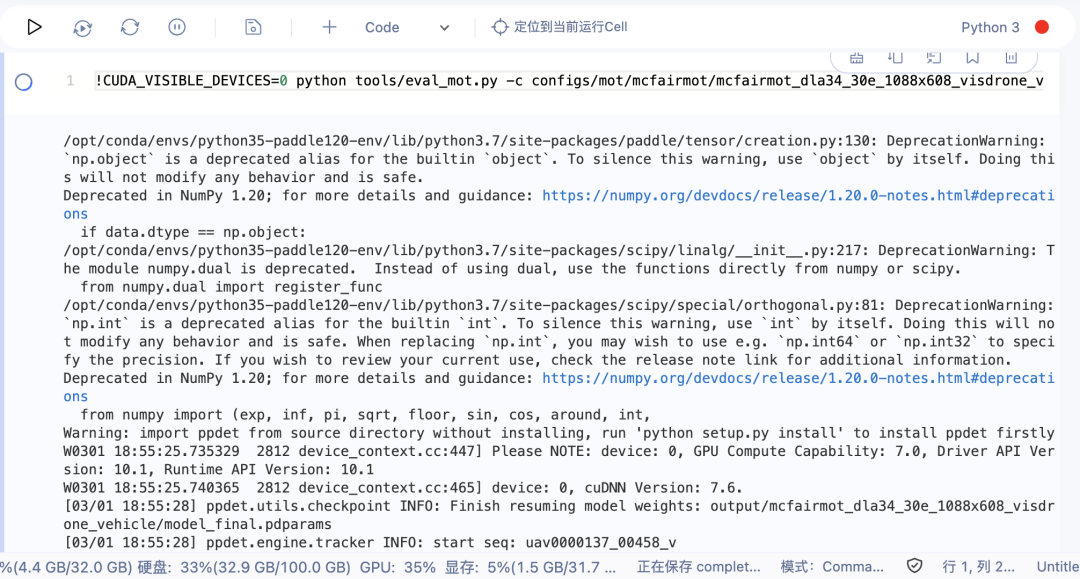
運行完成頁面如下圖:
————————分割線——————————
完成后記得停止運行Notebook,避免浪費免費算力
記得截圖最后一步完成打卡哦~
打卡截圖示例:
Day3
1.啟動運行并打開Notebook
2.重新升級PaddlePpaddle2.2.2,注意,每次重新啟動打開Notebook都需要重新升級PaddlePpaddle2.2.2
運行完成頁面如下圖
3.重新安裝環境依賴,注意,每次重新啟動打開Notebook都需要重新安裝環境依賴
運行完成頁面如下圖
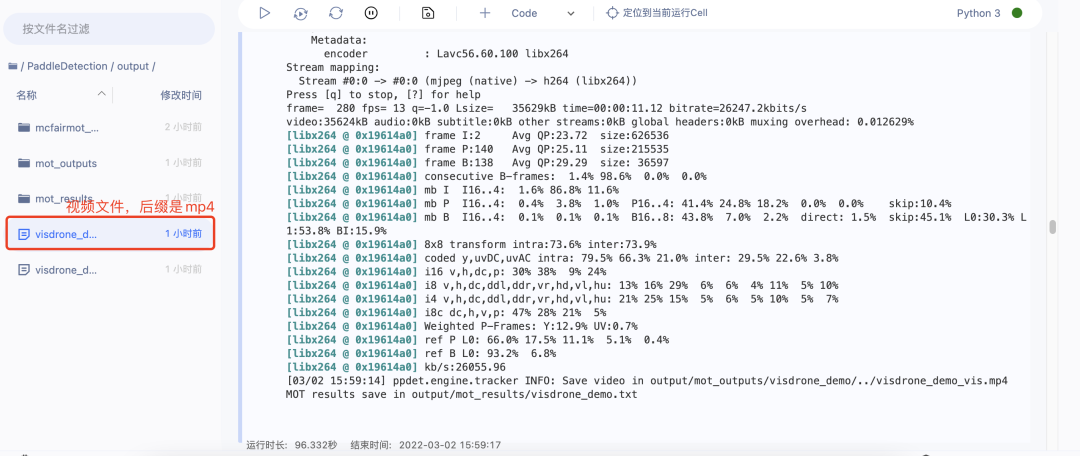
4.模型預測,預測完成后的視頻檔案在PaddleDetection/output/mot_results/visdrone_demo.txt,可以自行下載查看
昨天用了方法一,預測代碼:!CUDA_VISIBLE_DEVICES=0 python tools/infer_mot.py -c configs/mot/mcfairmot/mcfairmot_dla34_30e_1088x608_visdrone_vehicle_bytetracker.yml -o weights=output/mcfairmot_dla34_30e_1088x608_visdrone_vehicle_bytetracker/model_final.pdparams --video_file=visdrone_demo.mp4 --frame_rate=20 --save_videos
昨天用了方法二,預測代碼:
!CUDA_VISIBLE_DEVICES=0 python tools/infer_mot.py -c configs/mot/mcfairmot/mcfairmot_dla34_30e_1088x608_visdrone_vehicle.yml -o weights=output/mcfairmot_dla34_30e_1088x608_visdrone_vehicle/model_final.pdparams --video_file=visdrone_demo.mp4 --frame_rate=20 --save_videos
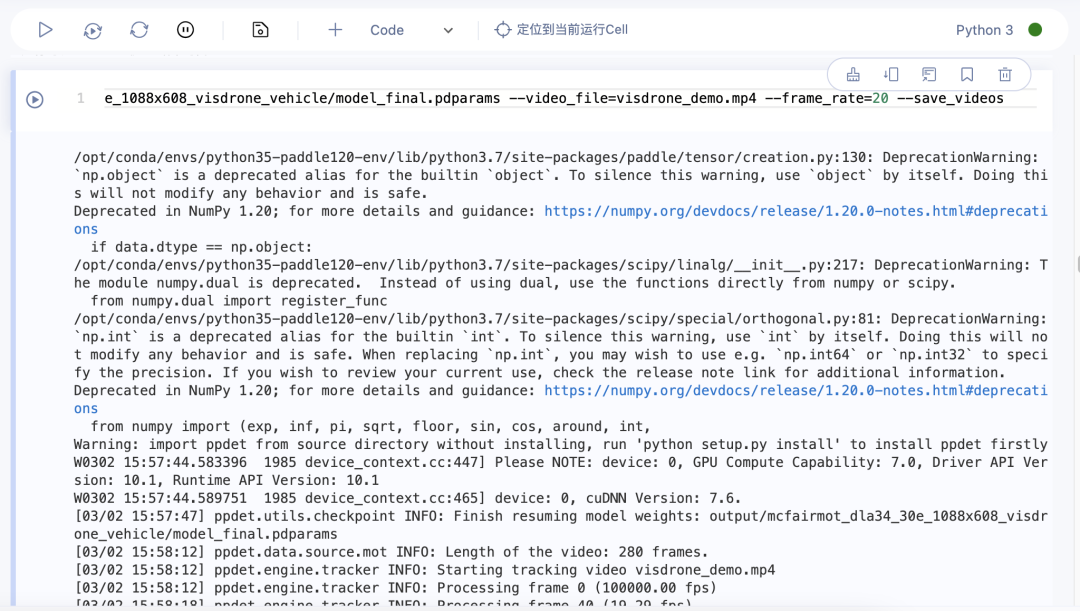
運行完成后結果頁面如下:
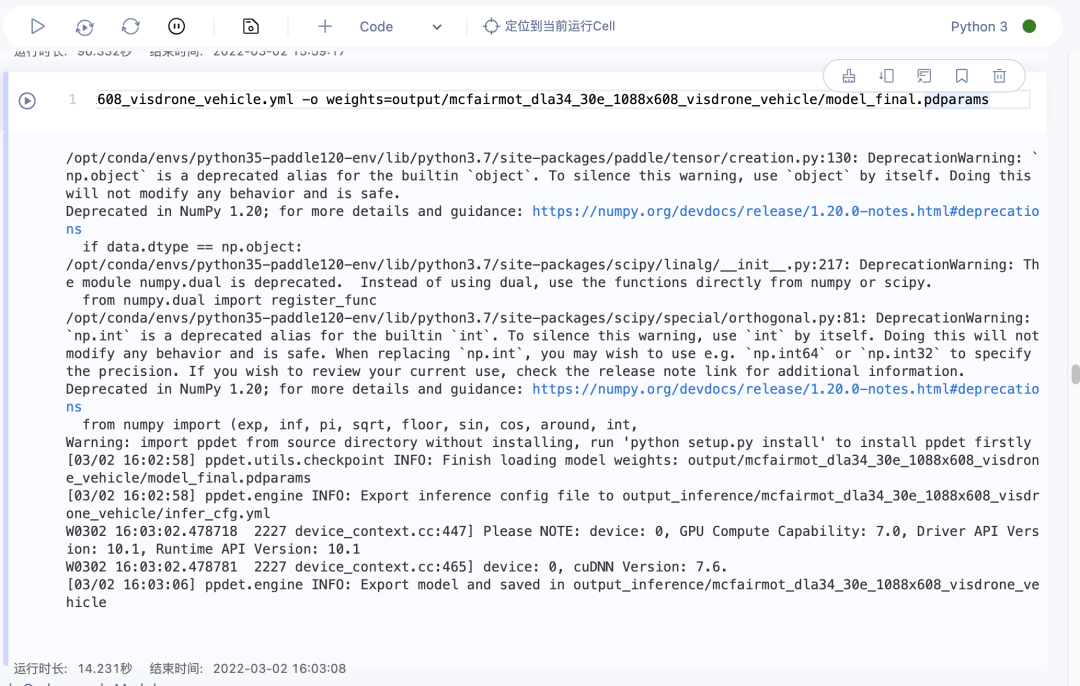
5.模型匯出
昨天用了方法一,匯出代碼:!CUDA_VISIBLE_DEVICES=0 python tools/export_model.py -c configs/mot/mcfairmot/mcfairmot_dla34_30e_1088x608_visdrone_vehicle_bytetracker.yml -o weights=output/mcfairmot_dla34_30e_1088x608_visdrone_vehicle_bytetracker/model_final.pdparams
昨天用了方法二,匯出代碼:
!CUDA_VISIBLE_DEVICES=0 python tools/export_model.py -c configs/mot/mcfairmot/mcfairmot_dla34_30e_1088x608_visdrone_vehicle.yml -o weights=output/mcfairmot_dla34_30e_1088x608_visdrone_vehicle/model_final.pdparams
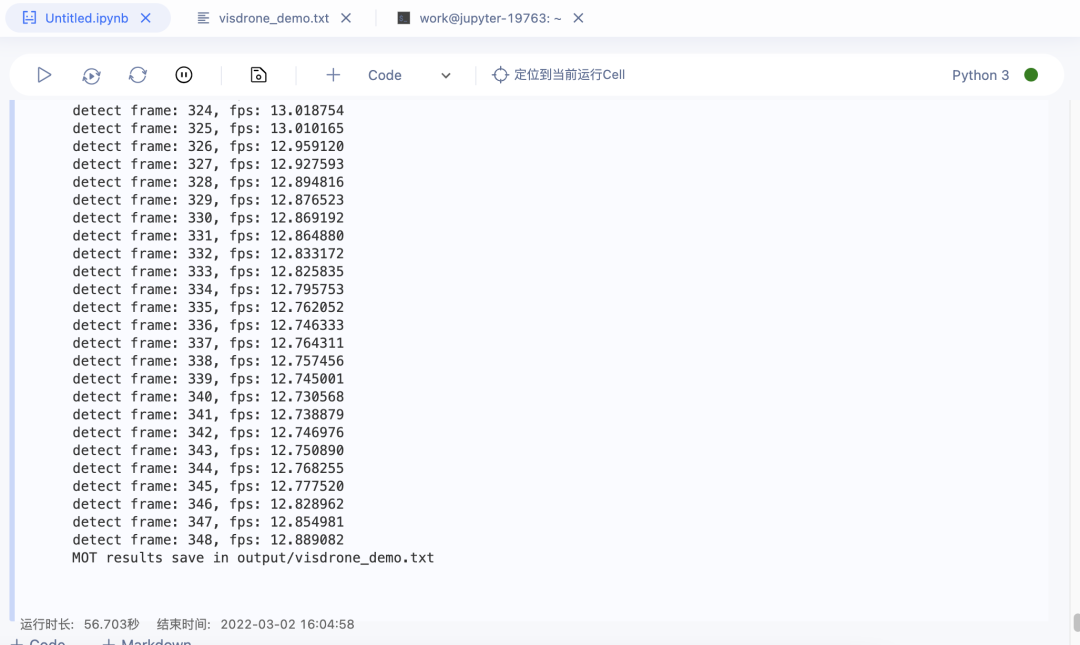
6.模型推理
昨天用了方法一,推理代碼:!CUDA_VISIBLE_DEVICES=0 python deploy/pptracking/python/mot_jde_infer.py --model_dir=output_inference/mcfairmot_dla34_30e_1088x608_visdrone_vehicle_bytetracker/ --video_file=visdrone_demo.mp4 --device=GPU --save_mot_txts
昨天用了方法一,推理代碼:
!CUDA_VISIBLE_DEVICES=0 python deploy/pptracking/python/mot_jde_infer.py --model_dir=output_inference/mcfairmot_dla34_30e_1088x608_visdrone_vehicle/ --video_file=visdrone_demo.mp4 --device=GPU --save_mot_txts
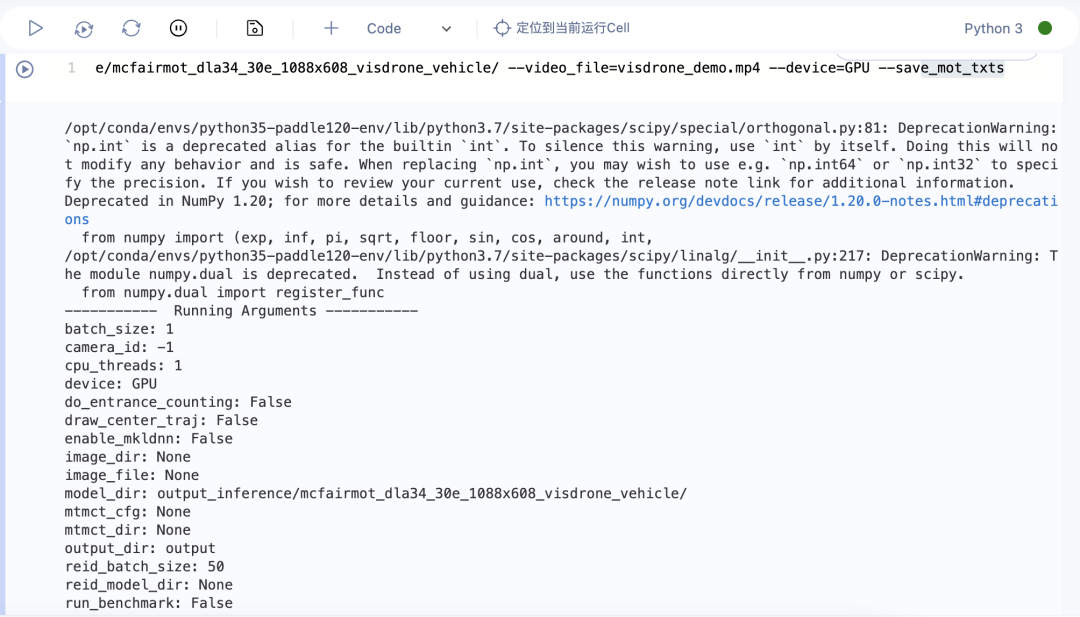
運行完成后結果界面如下:
記得截圖最后一步完成打卡哦~
打卡截圖示例:
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/437959.html
標籤:AI
上一篇:使用LabelImg準備訓練YOLO目標檢測所需要的自定義資料集
下一篇:windows + anaconda + pycharm + nvidia + cuda + cudnn + pytorch 安裝教程