1 3D 視覺
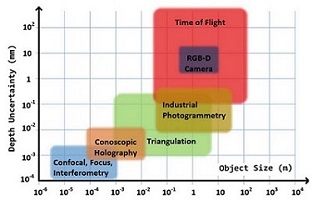
常見的三維視覺技術,包含雙目、ToF、激光三角、結構光等,如下圖:

1)毫米級
雙目、ToF、結構光(散斑)的精度為 mm 級,多見于消費領域,如:導航避障,VR/AR,刷臉支付等



2)微米級
線激光、結構光(編碼)的精度是 um 級,主要應用在工業領域,如:表面缺陷檢測、三維測量等


3)納米級
另外,還有 nm 級精度的光譜共焦技術,可用于透明材質物體的三維測量
2 激光三角法
按照激光投射的不同模式,激光三角法有點激光、線激光、多線激光、激光網格等
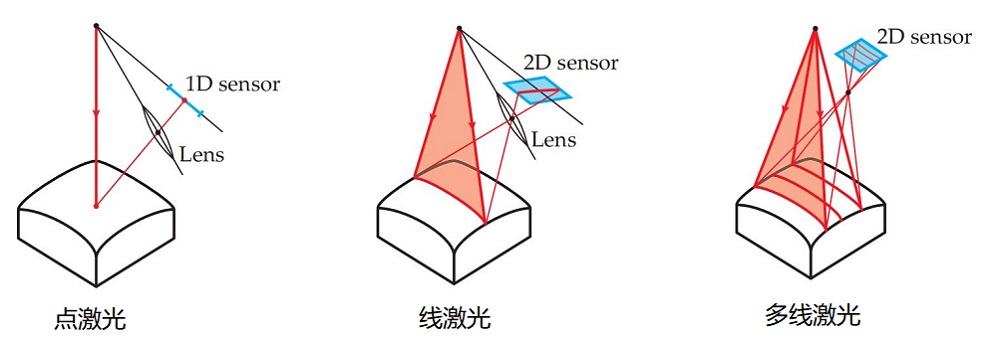
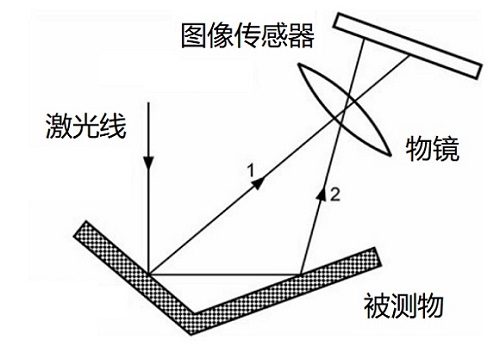
2.1 測量原理
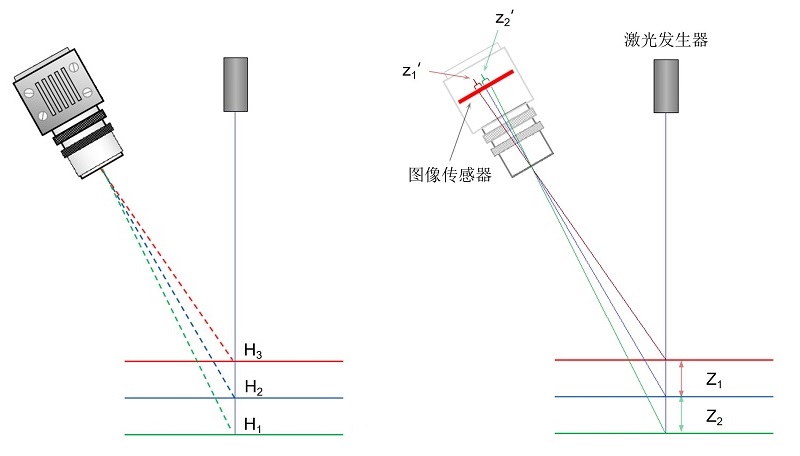
為了直觀的了解激光三角法,用點激光位移傳感器,演示其測量原理如下:
假定相機主光軸和激光平面的夾角為 $\theta$,鏡頭的像方焦距為 $f^{\prime}$,激光平面和主光軸的交點為 $H_2$,鏡頭前主點到 $H_2$ 的距離為 $l$
$Z_1$ 和 $Z_2$ 為被測物沿光平面的縱向位移,$z_1^{\prime}$ 和 $z_2^{\prime}$ 為對應在影像傳感器上的物理尺寸位移
則通過相似三角形,有如下等式
$\quad \begin{split} \frac{z_1^{\prime}}{f^{\prime}} = \frac{Z_1 \cdot sin\theta }{l -Z_1 \cdot cos\theta} \end{split}$(過 $H_3$ 作到主光軸的垂線)
$\quad \begin{split} \frac{z_2^{\prime}}{f^{\prime}} = \frac{Z_2 \cdot sin\theta}{l+Z_2 \cdot cos\theta} \end{split}$(過 $H_1$ 作到主光軸的垂線)
進一步化簡得
$\quad \begin{split} Z_1 = \frac{z_1^{\prime} \cdot l}{f^{\prime} \cdot sin\theta + z_1^{\prime} \cdot cos\theta}\end{split}$(近端視場)
$\quad \begin{split} Z_2 = \frac{z_2^{\prime} \cdot l}{f^{\prime} \cdot sin\theta - z_2^{\prime} \cdot cos\theta}\end{split}$(遠端視場)
2.2 精度范圍
在3D視覺技術中,從被測物的大小和縱向精度來考慮,廣義三角法 (包含激光三角法) 處于中間的位置,如下:
- 被測物體的大小范圍 1mm ~ 8m,對應精度 1um ~ 0.4mm
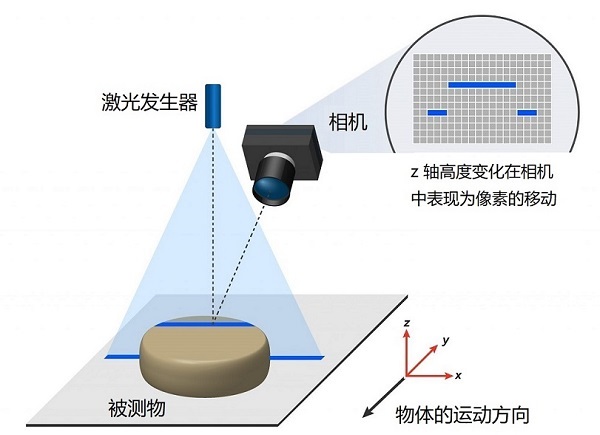
3 線激光3D相機
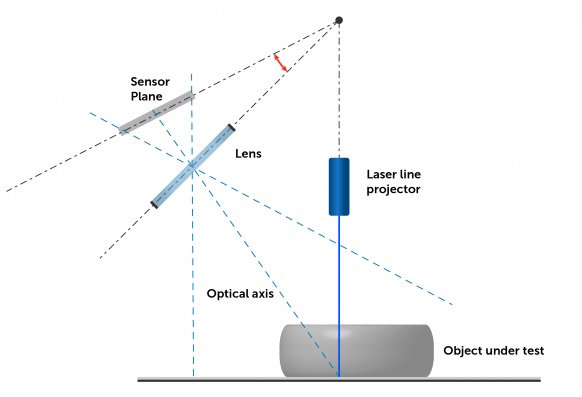
線激光3D相機,是一種基于三角測量原理,通過影像傳感器,捕獲激光發生器投射在物體表面的激光線資訊,重構物體表面輪廓資訊的三維相機
其結構示意圖,如下:
3.1 深度測量范圍
3.1.1 鏡頭景深
對于普通的3D視覺系統 (物面∥像面),深度測量范圍即鏡頭的景深,假設放大率 $\begin{split}\beta = \frac{y^{\prime}}{y}\end{split}$,鏡頭的有效F數為 $(f/nr)_e$,則景深 $\begin{split}DOF \approx \frac{2 \cdot (f/nr)_e \cdot \delta}{\beta^2} \end{split}$
當系統設計的光學放大率 $\beta$ 較大時,意味著景深較小,如果要繼續增大景深(尤其物體表面和鏡頭主面不平行),則只能增加 F數,即減小光圈
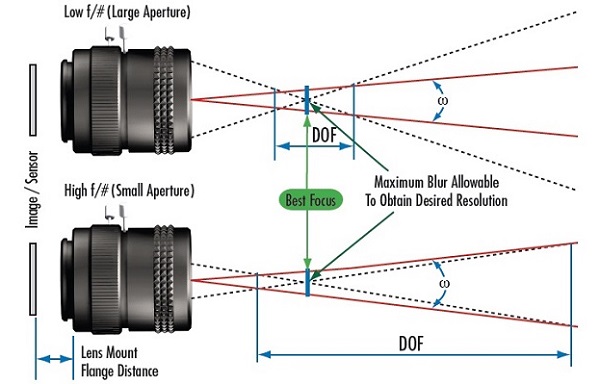
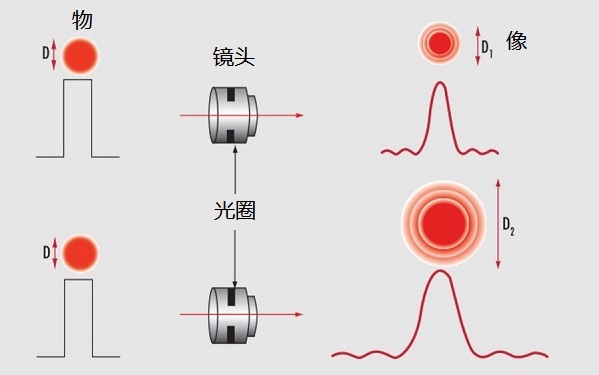
實際應用中,光圈的減小是有一定限度的:
1) 如果光圈太小,則會產生衍射,使得較小的細節資訊變的模糊(即在最佳焦點下可決議的特征尺寸會變大)
2) 隨著光圈的減小,進入影像傳感器的光線也會越少,相應地,就要增大(激光器)功率或(相機)曝光時間
3.1.2 沙姆定律
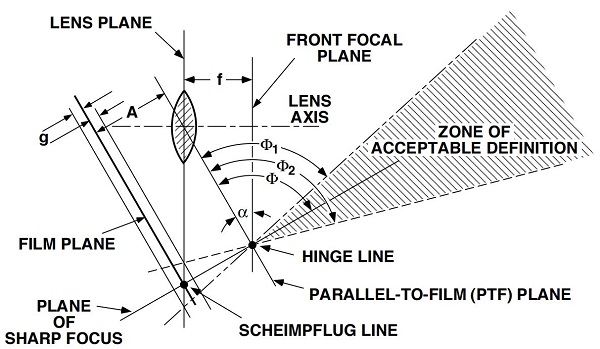
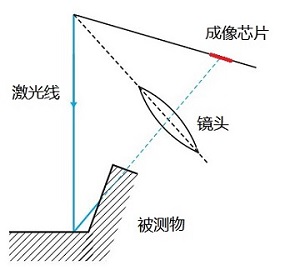
在光圈調節受限的情況下,如果仍有部分成像不清晰,則可采用沙姆結構,將鏡頭逐漸傾斜,從而使整個物體表面都可以清晰成像,如下圖:


線激光3D相機,為了增大深度測量范圍,通常采用沙姆結構,如下:
- 被攝物平面 (激光平面)、鏡頭平面、膠片平面 (像平面) 交于一條直線,即沙姆定律(Scheimpflug principle)
假設成像芯片的膠深(Depth of Focus)為 ±g,則成像系統的景深(Depth of Field) 為下圖中的陰影部分,即從 $\phi_1$ 到 $\phi_2$ 間的扇形區域
3.2 結構形式
線激光3D相機,基本的結構形式有四種:直射式、斜射式、反射式、同側式,其它的結構,多是在此基礎上的發展演變
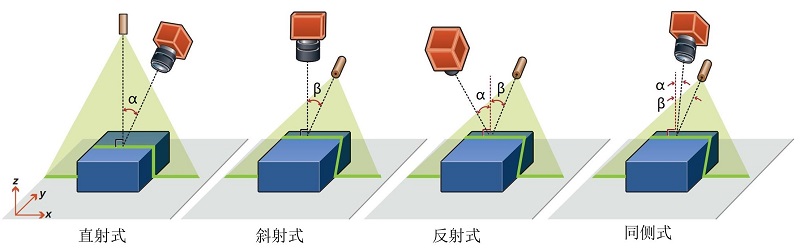
直射式,布置安裝簡單,計算結果的應用非常直觀,是目前最常用,也是一種通用的結構形式;
斜射式,布置安裝簡單,計算結果的應用不夠直觀,多用于對精度要求高的平面物體的特征測量;
反射式,布置安裝復雜,計算結果的應用不夠直觀,多用于反射特性較弱的深色物體的表面測量;
同側式,多用于高反光件,比較少見 (因為直射式和斜射式,通過俯仰一定的角度,也可達到類似的效果)
3.2.1 解析度
線激光3D相機的解析度,可分為三個方向:
1)激光條方向 (x軸):$\Delta x = \dfrac{\text 沿光條的視場寬度}{\text對應像素數量}$
2)運動方向 (y軸):$\Delta y = \dfrac{\text運動速度}{\text相機幀率}$,或 取決于編碼信號
3)深度方向 (z軸):$\Delta z$ 取決于系統光學放大率、相機光軸和激光平面的夾角、激光條提點精度 (如:$\dfrac{1}{16}$像素,$\dfrac{1}{32}$像素,$\dfrac{1}{64}$像素,...)
相機光軸和激光平面的夾角 $\theta$ 越大,則相應的 $z$ 軸解析度越高,如下:
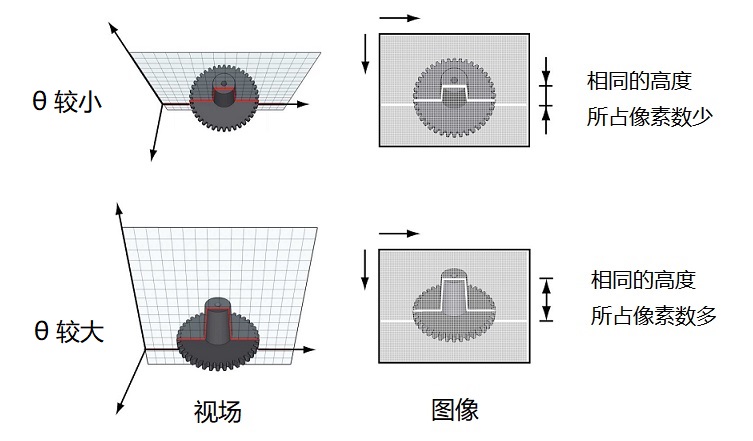
假定沿激光條方向的解析度,在以上結構中都為 $\Delta x$,則有:
$\quad\Delta z_{直射式} = \dfrac{\Delta x}{\sin \alpha_1}$,$\quad\Delta z_{斜射式} = \dfrac{\Delta x}{\tan \alpha_2}$
$\quad\Delta z_{反射式} = \dfrac{\Delta x \cdot \cos\beta_3}{\sin (\alpha_3+\beta_3)}$,$\quad\Delta z_{同側式} = \dfrac{\Delta x \cdot \cos\beta_4}{\sin (\beta_4 -\alpha_4)}$
因此,如果只考慮 θ 角的影響,則 z 向解析度為:反射式 > 斜射式 > 直射式 > 同側式
3.2.2 光學遮擋
雖然增大相機光軸和激光平面之間的夾角,可以提高 z 軸解析度,但隨著夾角 θ 的增大,光學遮擋現象也會愈發明顯
尤其是物體表面有凹凸起伏時,四種結構均存在一定的遮擋:激光線照不到的區域稱為陰影,相機接收不著反射光線的區域稱為盲區
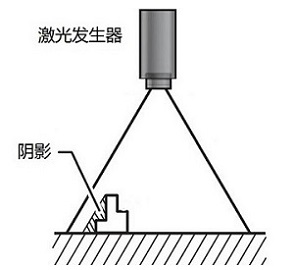
因為激光發射線正對被測物,所以直射式的陰影最小;同理,因為相機正對被測物,所以反射式的盲區最小
實際中,大部分被測物的表面,通常都是凹凸起伏的,因此,θ 角的設計,要充分考慮精度(z軸) 和 遮擋(陰影和盲區) 的平衡
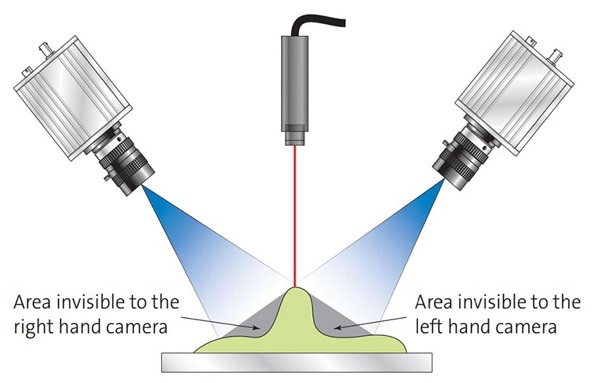
此外,也可增加激光器數量,從不同方向投射,來減少陰影;或者增加相機數量,從不同角度拍攝,將多幅影像進行融合,來降低盲區
3.3 散射特性
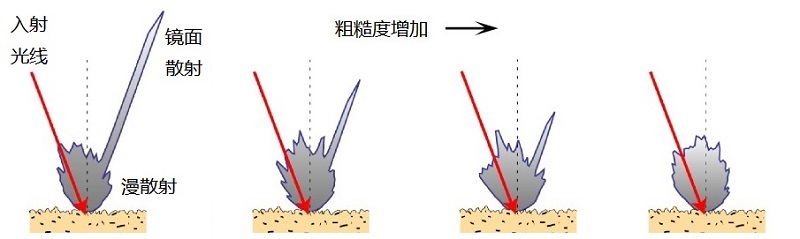
當激光束打在不同的被測物上時,考慮物體表面的散射特性,可分為四種情況:
a)激光打在鏡面上時,發生鏡面反射,反射方向取決于激光和表面的相對方向,反射光一般不會進入相機,表現為無信號
b)激光打在朗伯體上,發生均勻散射,散射的強度正比于觀察方向和表面法向量夾角的余弦,是一種最理想的情況
c)激光打在普通物體上,通常發生定向散射,即最大散射強度出現在一個理想的反射方向上,散射分布的角半寬,取決于表面粗糙度
d)激光打在半透明物體上(塑料、玻璃等),光線會進入物體內部,發生體散射 (volume scattering)

實際中,物體表面的散射特性是 a) b) c) d) 的混合,其中占主導地位的散射特征,主要取決于表面粗糙度,如下圖:
- 隨著表面粗糙度的增加,物體的散射特性,由鏡面散射占主導地位,逐漸演變為漫散射占主導
如果物體表面的顆粒大小和入射光的波長相近時,激光容易發生相長和相消干涉,產生散斑噪聲,如下:

此外,激光散斑噪聲,也與成像系統的放大率有關,放大率 β 越大,散斑噪聲愈發明顯,
保持系統結構不變,更換焦距為之前 1/2 的鏡頭,對于同樣的激光條,新拍攝的影像,如下:

對于線激光3D相機,如果出現比較明顯的散斑噪聲,會影響光條中心點的提取精度,如下:

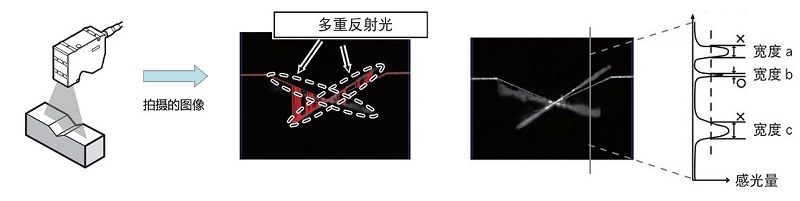
3.4 多重反射
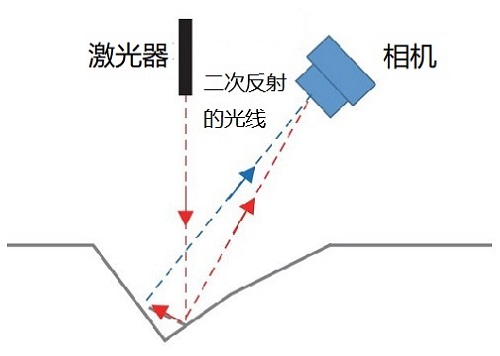
如果被測物體的表面不均勻,則除了光學遮擋外,還有可能出現多重反射,如下圖:
- 光線1是入射光在物體表面發生的第一次反射,光線2是入射光在物體表面發生的第二次反射,這兩條光線在探測器上的成像位置不同
二次或多次反射的光線,與一次反射的光線相比,在光條影像上會看到明顯變粗的傾向,因此,可將寬度超過一定閾值的光條剔除掉
但是,對于二次反射的光線,如果其反射的強度大于一次反射的強度,則可能會形成假像,影響測量精度
這種二次反射形成的假像,在物體材質為金屬且表面存在小孔洞時,出現的概率較大,目前暫無有效的方法 (潛在可能解決的一個方向是線偏振)
4 行業淺析
從線激光3D相機到3D視覺產業,再到整個機器視覺的產業鏈圖譜,如下:
1)上游是基礎器件的生產商,如鏡頭、影像傳感器、演算法平臺等;
2)中游為視覺系統制造商,如 ToF相機、線激光3D相機、結構光相機等;
3)下游則是圍繞中游提供的視覺系統,深入到各個行業的系統集成商,如3C行業的缺陷檢測、汽車制造的質量控制等
隨著國家智能制造大戰略的推進,整個行業將迎來快速增長期,尤其是國產化替代的行程會大大加快,替代程序會先從產業鏈的下游,再到中游,最后擴展到上游
以線激光3D相機為例,在 2015年以前,第一梯隊主要是Keyence、LMI、Cognex等國外品牌,第二梯隊有SICK、米銥、SmartRay等眾多國外廠家,國內鮮有成規模的企業與之競爭
然而,在 2020年左右,國內涌現出了像是深視智能、中科行智等一批國產廠商,雖然暫時不能完全替代第一梯隊,但已經對第二梯隊形成了較大的沖擊
由此,預測在未來的 5-8年內,機器視覺行業內將會出現不止一家獨角獸企業,完成產業鏈上-中-下游的全面整合,對當前第一二梯隊的國外品牌形成全面的沖擊,至少完成50%以上的國產化替代
未來機器視覺行業內,獨角獸企業的形成有兩種可能:
一種可能是,做某行業系統集成的下游企業,在業務拓展到一定規模后,反過來向上收購中游的3D視覺企業,最后把觸手伸向上游的基礎器件廠家,完成全產業鏈的整合
另一種則是,中游的視覺系統企業,在給下游企業提供視覺設備時,逐漸積累了具體行業內的應用經驗,從而引入新的業務,形成對原來下游企業的成本優勢,從而完成產業鏈的整合
參考資料
景深與焦深
解析度與對比的限制:艾里斑
Scheimpflung principle
LMI 3D Line Confocal Sensors
GOM High Precision 3D Metrology
Teledyne e2v How does laser triangulation work
Understanding laser-based 3D triangulation methods
《Laser Measurement Technology》ch10
《3D Imaging, Analysis and Applications》2nd, ch5
《Machine Vision: Automated Visual Inspection:Theory, Practice and Applications》
原文鏈接: http://www.cnblogs.com/xinxue/
專注于機器視覺、OpenCV、C++ 編程
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/448196.html
標籤:其他
上一篇:一起來打靶 02
下一篇:云計算第五章