狀態空間概述
問題記錄:
-
為什么狀態空間方程中輸出,狀態倒數等于輸入和狀態之和而不是乘或者別的符號?
-
控制器,觀測器形式的狀態空間方程咋來的?,形式如何理解?為什么兩者的關系是轉置?什么是對偶?
-
對于MIMO系統,是否存在唯一的傳遞函式矩陣?
不是,等于原來的轉置
聽課記錄:
研究一個系統最開始是建模,而現控相比于古典控制建模部分出現了較大改變,而這種改變導致系統的描述更加簡單,數值計算更加方便,
現代控制系統在古典控制的基礎上增加了一個研究因素——狀態,所以我們要把運算式抽象成這樣:
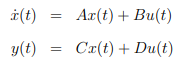
第一個式子表示下一個狀態和當前狀態和輸入的關系
同時繼承控制的必須研究的內容,輸出和輸入和當前狀態的關系
用當前狀態和未來狀態來表示我們的新研究因素:狀態
對比于古典控制需注意:
- 一個系統的狀態空間方程不唯一,但是系統的傳遞函式唯一
- 狀態空間方程研究時域
一個狀態空間方程可以表示成對應系統傳遞函式矩陣,
結果如下:
同時也引出,一個MIMO系統的表示用狀態空間方程來建模更加簡略,但是使用傳遞函式就更為復雜,比如一個5輸入8輸出的傳遞函式矩陣大小是8*5
接下來介紹狀態空間運算式的書寫
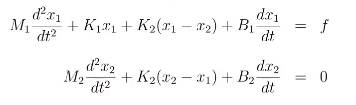
- 找出微分方程
- 找出狀態變數個數,寫出狀態空間方程組
- 寫出ABCD矩陣
主要就是把一個高階的微分方程變成一階線性微分方程組,也就是把高階微分變成用狀態變數來表示,掌握這個就可以進行狀態空間表示,
同時要明確每個矩陣的行數列數和各個變數數的關系,
- A矩陣的行數代表狀態變數個數,列數也是
- B矩陣的行數代表狀態變數個數,列數代表輸入的個數
- C矩陣行數代表輸出的個數,列代表狀態變數
- D行數輸出,列輸入
只要記住矩陣左邊是需要變換的線性空間,右邊是目標線性空間,行數代表維數,列數代表變數個數即可
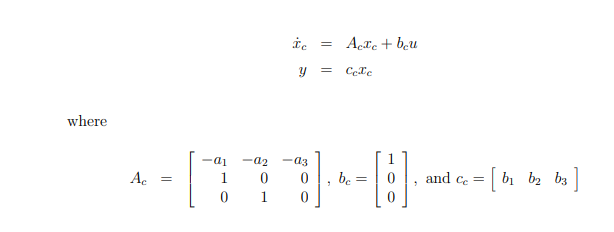
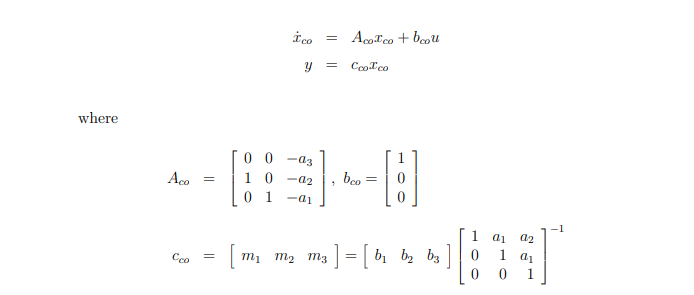
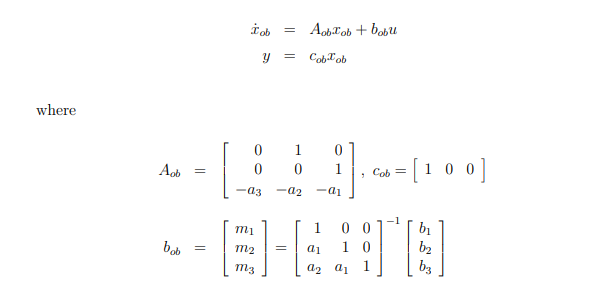
接下來介紹一些特殊的狀態空間方程形式. 之前提到過狀態方程可以有很多種實作方式,學者們提出了方便控制器設計,檢測器設計的狀態空間矩陣設計
控制器對偶形式:
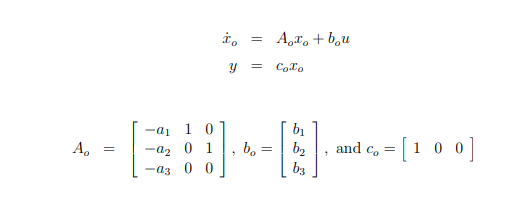
傳感器對偶形式
控制能力對偶性質
可觀測性對偶性質
總結:
學習思路:
古典控制與現代控制的區別
介紹現代控制的基礎--建模方式--狀態空間建模的一般形式
如何將上述一般形式轉換成傳遞函式
如何列出狀態空間方程
狀態空間方程各矩陣的表達的含義
各種特殊的狀態空間方程
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/504436.html
標籤:其他
上一篇:【轉載】精進亞馬遜廣告投放 - 基礎知識篇(1)--SciAds
下一篇:網路層