樹莓派無人機體驗課2日
- 前言
- 一、課程主要內容
- 二、APM無人機介紹
- 1.組裝
- 2.missionplanner 地面站的使用
- 3.樹莓派配置
- 總結
前言
提示:本文要記錄的大概內容:
智能自主無人機是最近火起來的概念,阿木實驗室和蒼穹四軸高瞻遠矚,及時從傳統無人機行業的應用轉身,2020年9月12日-13日,在美麗的蓉城菁蓉鎮無人機創業谷,兩家公司聯手舉辦此次樹莓派無人機線下體驗課,吸引了來自全國各地的8位同學,我是其中一員,此次課程的主講老師是蒼穹四軸的老板陳sir,陳sir有著開發四旋翼飛行器的多年經驗,
提示:以下是本篇文章正文內容
一、課程主要內容
自主無人機目前分為兩大派,一派是以阿木實驗室為代表的基于PX4韌體開發的自主無人機系列,一派是以蒼穹四軸的路線為代表的基于APM韌體的自主無人機系列,此次線下培訓是基于APM韌體的無人機系列,
二、APM無人機介紹
1.組裝
自組F450無人機,加裝蒼穹四軸提供的拓展板,可實作板載計算機plus功能,
材料如下(示例):
碳纖維機架 X1 套
無刷電機 X4 只
無刷電子調速器(電調/ESC) X4 只
Pixhawk 飛控及配件 X1 套
M8N GPS X1 個
無線數傳 X1 對
動力電池 3/4S 電池 X1 個
RC 遙控器和 RC 接識訓 X1 套
機載電腦樹莓派 X1 個
Inter T265 雙目相機 X1 個
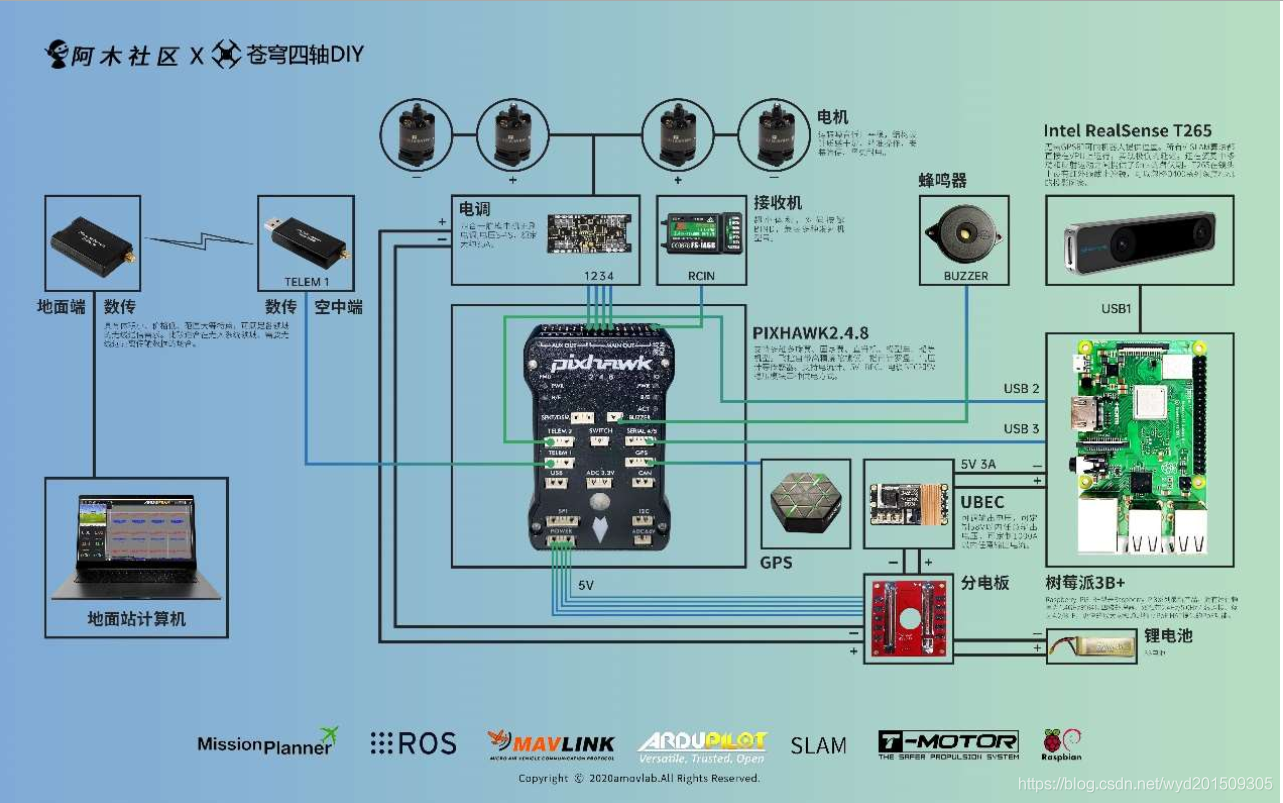
連接如下(示例):
1.1 飛控先安裝,再除錯;
1.2 電機的旋轉方向調整;
1.3 電調油門行程的校準;
1.3 飛行模式設定;
1.4 失控保護設定,
2.樹莓派的安裝與接線
2.1 ttl 轉 usb 模塊的接線
2.missionplanner 地面站的使用
Pixhawk 支持 ardupilot 韌體和 PX4 韌體,分別對應
missionplanner 地面站和 QGC 地面站,我們這次培訓使用的是 ardupilot 韌體(簡稱APM),

這里有很多的配置,只有完整地學一遍才能體會到,
3.樹莓派配置
以往經驗,我們總覺得需要ROS作業系統,但這次陳sir提供了一個完全不同的思路,讓我打開眼界,
ubuntu下,有一個drone-kit的pythoon庫,依托此庫,可以實作樹莓派與pixhawk飛控的通信,便于下發命令控制無人機,同時有利于資料流的向上傳達,
當然,apm韌體搭建程序同px4,需要gcc-arm交叉編譯環境,
最后介紹T265,實踐證明,氪金是有效果的,T265的跟蹤性能確實十分出色室內定位修改一些引數后,效果十分明顯,

總結
以上就是今天要講的內容,本文僅僅簡單介紹了樹莓派自主無人機,在此感謝阿木實驗室和蒼穹四軸的支持!
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/64778.html
標籤:其他