前言
不必害怕未知,無需恐懼犯錯,做一個Creator!
本文主要介紹STM32_HAL庫開發中看門狗的使用,
一、開發步驟
1.STM32CubeMX配置
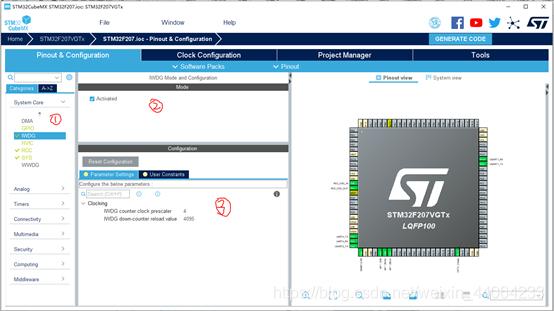
- 在左側引腳配置處勾選IWDG進行配置
- 在IWDG模式處勾選“Activated”使能IWDG
- 在IWDG引數配置處進行引數配置:IWDG時鐘引數和IWDG計數器,
看門狗溢位時間=(分頻值×重裝值)/ IWDG時鐘頻率
(圖中設定4×4095/32000=0.51s)
2.喂狗函式介面放入程式中
while (1)
{
HAL_Delay(5000);
HAL_IWDG_Refresh(&hiwdg); //在主程式回圈中進行喂狗
}
二、主要函式介面
1.HAL庫喂狗操作函式
HAL_IWDG_Refresh(IWDG_HandleTypeDef *hiwdg)
進行一次喂狗操作,
引數:IWDG結構體
三、看門狗區別
| 獨立看門狗(IWDG) | 視窗看門狗(WWDG) |
|---|---|
| 專用的低速時鐘(LSI)驅動,能夠完全獨立作業 | APB1時鐘分頻后得到時鐘驅動 |
| 避免程式跑飛,死回圈,對時間精度要求低的場合 | 適合那些要求看門狗在精確計時視窗起作用的程式 |
| 沒有中斷,直接復位 | 有中斷,可做復位前操作 |
| 計數值<重裝值,喂狗 | 0x40<計數值<視窗值,喂狗 |
總結
本專案中看門狗的使用主要可以歸納為:
1.看門狗相關引數配置(STM32CubeMX中)
2.喂狗操作函式放入程式中
提示:若有錯誤不足,歡迎批評指正,該系列文章僅供參考,歡迎互相學習交流,
感謝你的閱讀,期待你的關注收藏點贊!
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/64780.html
標籤:其他
上一篇:樹莓派無人機體驗課2日