2019杭州云棲大會上,高德地圖技術團隊向與會者分享了包括視覺與機器智能、路線規劃、場景化/精細化定位時空資料應用、億級流量架構演進等多個出行技術領域的熱門話題,現場火爆,聽眾反響強烈,我們把其中的優秀演講內容整理成文并陸續發布出來,本文為其中一篇,
阿里巴巴高級地圖技術專家方興在高德技術專場做了題為《向場景化、精細化演進的定位技術》的演講,主要分享了高德在提升定位精度方面的探索和實踐,本文根據現場內容整理而成(在不影響原意的情況下對文字略作編輯),更多定位技術的實作細節請關注后續系列文章,
以下為方興演講內容的簡版實錄:

今天要分享的主題是關于定位的場景化、精細化,高德定位,并不只是服務于高德地圖本身,而是面向所有的應用開發者和手機設備廠商提供定位服務,目前已有30萬以上的APP在使用高德的定位服務,
用戶每天會大量使用定位服務,比如看新聞、打車、訂外賣,甚至是購物,首先都是要獲得位置資訊,有了更精準的位置資訊,才可能獲得更好的服務體驗,
高德地圖有超過1億的榷訓用戶,但是使用定位的有好幾個億,每天的定位請求數量有一千億次,如此大的資料量,高德定位服務可以保持毫秒級的回應速度,我們在這里面做了很多作業,此外,我們還提供全場景的定位能力,不管為手機、車機還是任何廠家,都能提供位置服務,
我今天從四個方面介紹,分別是:
- 定位面臨的挑戰
- 高德地圖全場景定位
- 分場景提升定位精度
- 未來機遇
定位面臨的挑戰
大家可能都知道GPS,GPS在大部分情況下可以提供很好的精度,但是對于某些場景還是不夠,比如駕車,GPS給出的精度大概是10米,如果僅靠GPS定位甚至無法區分出在馬路的哪一側,
第二個場景是在室內,室內收不到GPS信號,這樣的場景下如何實作比較準確的定位?第三個場景是如何在精度和成本之間取得平衡,因為不可能為了追求一個很好的精度去無限投入成本,只有通過海量大資料挖掘,演算法和資料質量的提升,達到效果的持續優化,才能達到最終對各種場景的全覆寫,
有很多技術可以選擇,除了GPS定位,還有基于網路定位、Wifi基站,原理就是通過掃描到的Wifi和基站串列、信號強度,進行資料庫查找,找到Wifi位置,定位,
除此之外還有慣性導航定位,慣性導航是一種相對定位的方式,可以不斷計算跟上次定位的偏移量,有了初始定位之后,根據連續計算可以獲得最終的位置,
還有根據地圖匹配定位,比如GPS的點落在一個湖里,顯然是有問題的,可以通過地圖匹配,找到最近的一條路,這時候精度就得到了提升,
還有一些定位方式最近幾年變得很熱門,例如視覺、雷達、激光,自動駕駛的概念推動了這些技術的發展,這些方式各有各的定位精度和差異性,例如視覺,在實踐中往往需要大量計算和存盤的開銷,
很多時候,還是要基于Wifi的定位,獲得初始定位,然后在不同場景下不斷的優化,通過不同的資料源提升精度,
高德地圖如何實作全場景定位
高德主要分為兩個業務場景,手機和車機,在手機上主要是GPS+網路定位,駕車的場景下,我們還會做一些根據地圖的匹配,實作對特殊道路的支持,
以往,很多用戶會反饋說會遇到GPS信號不好,導致無法定位、無法導航的情形,約有60%的情況是因為用戶位于地下停車場或者在隧道里,約30%的情況是附近有嚴重的遮擋,比如在高架橋下,或者在很高的高樓旁,這些都會造成對GPS比較嚴重的遮擋,
我們打電話的時候,連接的基站可能就在一公里范圍內,這樣短的距離傳輸信號還時常會出現信號中斷,如果GPS信號距離兩萬多米的高度,出現問題的可能性還是存在的,所以必須通過其他方式,例如地圖匹配或者慣性導航來對GPS進行補充,
在室內的場景,需要解決的是如何去挖掘Wifi基站的位置,提升精度,
在車機的場景,我們會結合更多來自于汽車的資料輸入來幫助我們,
定位的基礎能力
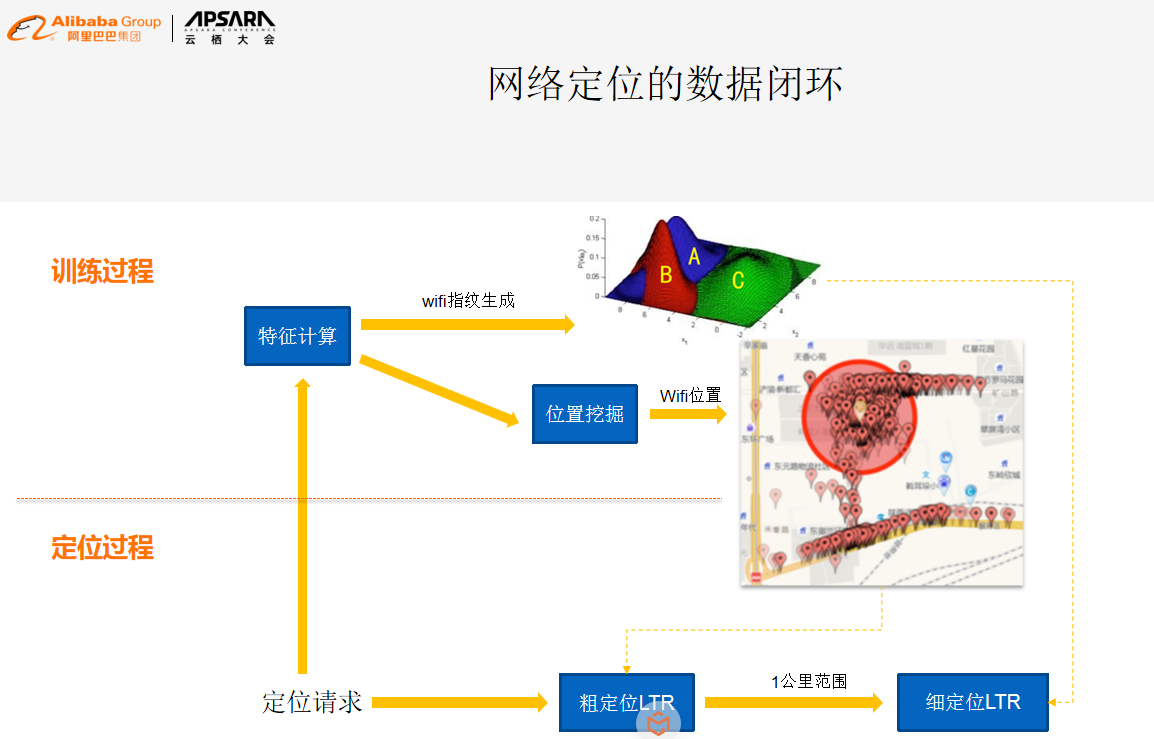
網路定位本質上是一個資料倍訓,每個人在定位的時候,實際上是發送了本身的基站和Wifi串列,發送的資料一方面可以用來定位,另一方面也可以用做資料訓練,資料訓練主要產出兩種資料,一個是Wifi基站的位置,通過資料挖掘,我們就可以獲得大概的位置(初始定位),但是精度比較差,第二個是產生更詳細的空間信號強度分布圖,有了這個圖以后,就可以進行比較精準的定位了,根據信號強度判斷我距離這個基站和Wifi有多遠,從而對精度進行改進,
資料倍訓完成以后,就是一個正向的反饋,資料越多,訓練結果越多,定位結果就越準確,從而吸引更多的用戶來使用(產生資料),這就是通過資料挖掘,不斷提升精度的倍訓,
演算法部分,我們也經過了不斷的迭代,最早是基于經典的聚類模型,就是掃描基站Wifi串列,聚類以后選擇其中一處作為我的位置,這個方法效率比較高,很快可以得到結果,但是精度很差,
第二步,我們把空間進行了精細的劃分,在每個網格內統計一些基礎的特征,比如歷史上的點定位的數量、定位的次數、Wifi的數量等等,計算出一個網格的打分,再對網格進行排序,最后你的定位點就是這個網格,通過這種方法,30米精度的占比提升了15%,
這種方法也有局限性,人工調參帶來的收益是有限的,調到一定程度就沒辦法再提升了,所以,第三步就是把機器學習演算法引入這個程序,利用監督的學習提升到最佳的模型和引數,這樣可以在特定場景下獲得顯著提升,主要的場景就是解決大誤差的Case,
一個比較典型的問題就是,掃描到的基站Wifi可能只有一個基站、一個Wifi,沒有別的資訊了,這個基站Wifi又離的特別遠,無論選擇基站還是Wifi,都有50%的概率是算錯了,有監督學習,就可以把海量的配送拿出來,精細化的挖掘細微的差異,達到全域最優的效果,在某一情況下選基站,某一情況下選Wifi,把犯錯的比例降低了50%,
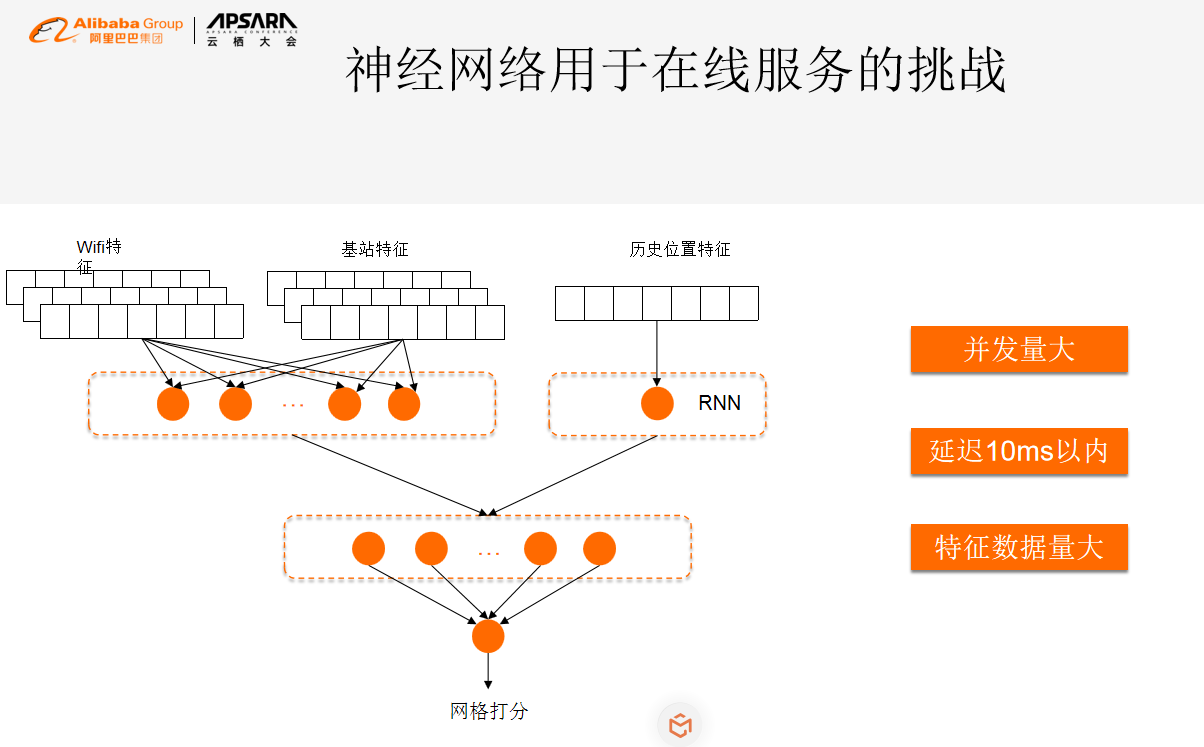
上圖就是我們的線上神經網路的模型,神經網路用于在線服務現在是比較流行的方式,我們在這里實際上是利用基站和Wifi的信號強度和混合特征作為特征輸入,同時把歷史位置也作為序列放進來,這個歷史位置特征會放入一個RNN模型,預測現在的位置,使用預測的結果和基站Wifi串列特征,再往下預測,最后是網格的打分,最終輸出一個概率最高的網格作為輸出,
這個方法最大的挑戰并不是在演算法,而是演算法效果和工程上的可實作性,如何能夠達到最優,高德每天有上千億次的呼叫,延時要在10毫秒以內,
另外,資料量很大,所有的資料,每條都有很多特征,在線的資料存盤大概有幾十個TB,這個資料量也不可能放在在線服務里做,所以要做相應的優化,
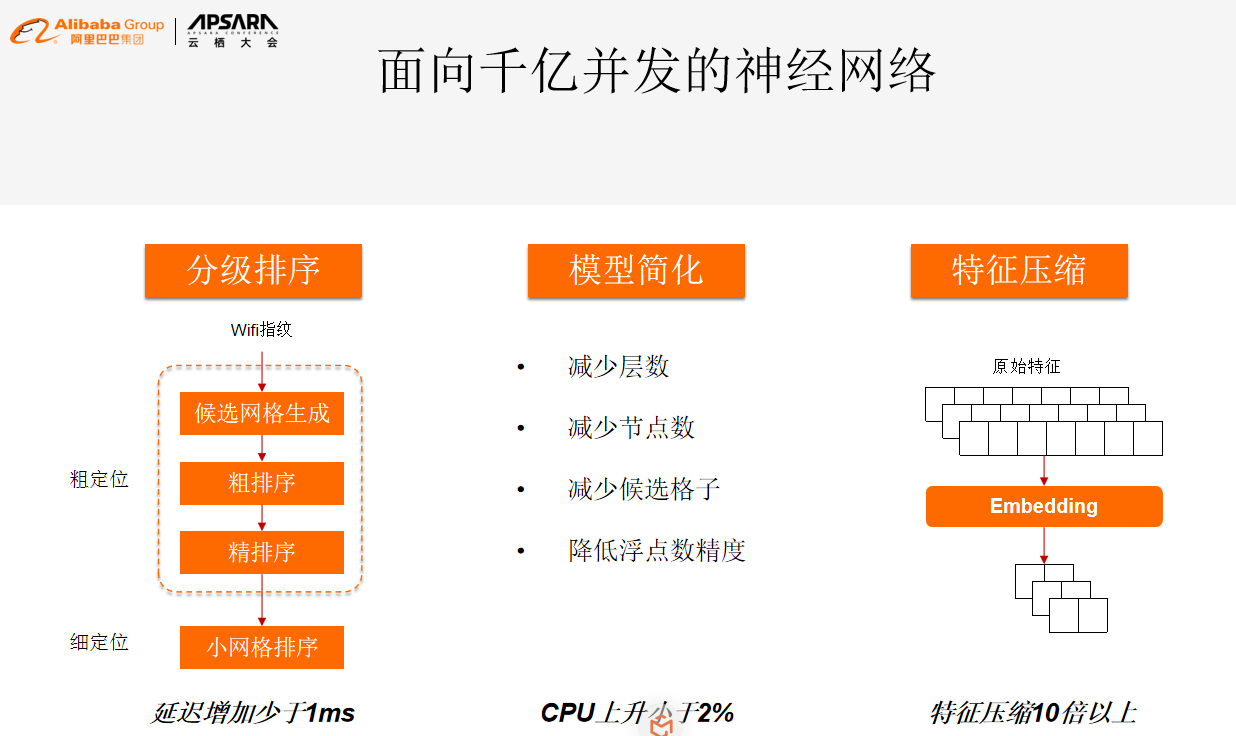
我們做了三個方面的優化,第一是分級排序,把定位程序變成一個顯微鏡步驟,先做一個很粗略的定位,然后逐步收斂到很精確的位置,粗略定位的時候可以用很大的網格,用很少的特征,快速過濾掉一些不可能的位置,
然后,在很精細的網格里,用更多的特征、更多的網格進行排序,通過這種方法,就可以極大提升計算的效率,把一些不必要的計算過濾掉,
第二是模型簡化,雖然深度學習的效果很好,但是不可能在線上用很復雜的模型,我們通過減少層數和節點數,把浮點數精度降低,
第三是特征壓縮,這里面有特色的一點是我們根據模型進行的壓縮,原始特征的輸入的數量是很大的,我們增加一個編碼層,輸入的特征經過編碼層以后,只輸出兩個位元組的特征,我們把在線、離線的資料處理好以后,最后在線只存盤兩個位元組,通過這種方法,在線特征的資料量降低了10倍,降低到1個TB以內,以上是解決的幾個主要問題,
不同場景下的精度提升
在室內場景,經常會定位到室外去,這跟剛才介紹的序列流程是有關系的,因為采集程序更大概率是在室外,序列后的Wifi位置都在馬路上,所以定位最后的概率也是在馬路上,但是這對用戶體驗是很差的,比如打車,可能在室內叫車,定位在對面的馬路上,但這條馬路可能是不對的,需要找到我在哪個樓里,離哪個道路比較近,
怎么解決這個問題?一種方法是通過資料采集,就是在室內進行人工的采集,使訓練資料的資料分布跟實際的預測資料分布保持一致,這種方法當然精度比較好,但是主要缺陷是成本非常高,目前也只是在熱門商場和交通樞紐進行這樣的資料采集,這肯定不是一個可擴展的方法,
我們的方法是想通過引入更多的資料優化定位程序,如果能基于地圖資料挖掘出Wifi和POI的關系,就可以用資料關聯提升精度,比如掃到一個Wifi,名字叫KFC,有一個可能就是你在肯德基里,這個方法比較簡單,實際用的方法會更加復雜,

我們是利用Wifi信號的分布反向挖掘出位置,上圖里藍色的部分就是樓塊的位置,紅色的點是Wifi的真實位置,綠色的點是采集到Wifi的位置,綠色越亮,代表這個地方的信號強度越強,通過這個圖放入影像學習,比如用CNN挖掘出它的位置以后,我們就可以建立一個Wifi跟樓塊或者跟POI的關聯,通過這個方法可以使全量Wifi的30%都能關聯上相應的POI或者樓塊,
在線的時候需要知道用戶什么時候在室內,什么時候在室外,我們用的是利用信號強度特征做區分的演算法,在室內室外掃描到的Wifi串列和強度會有很大差別,通過這個差別可以訓練出模型,綠色的點預測為室內的點,藍色的點是室外的點,通過這種方法,定位精度提升了15%,
駕車場景,導航程序中可能會遇到的常見問題,第一個問題是無法定位,開到停車場或者有遮擋的地方,第二個場景是點會有漂移,因為GPS受到建筑或者其他遮擋的時候,會產生精度下降的情況,第三種情況是無法區分主路,可能會錯過路口,
對于以上問題,我們采用的是“軟+硬”融合定位,軟的部分包括兩部分,一個是基于移動定位,第二個是根據地圖匹配,經過兩個“軟+硬”結合之后,我們在GPS 10米精度做到90%以上,可以實作高架主路和停車場的持續導航,
這里面關鍵的就是如何實作融合定位,比較有特色的一點就是我們做車機的傳感器模塊是低成本的,成本不到100元,其他類似產品成本是比較高的,可能需要幾千塊錢,使用低成本的器件,能夠更容易得到普及,缺點是精度比較差,定位準確性差一些,要通過軟體的方法彌補硬體上的缺點,
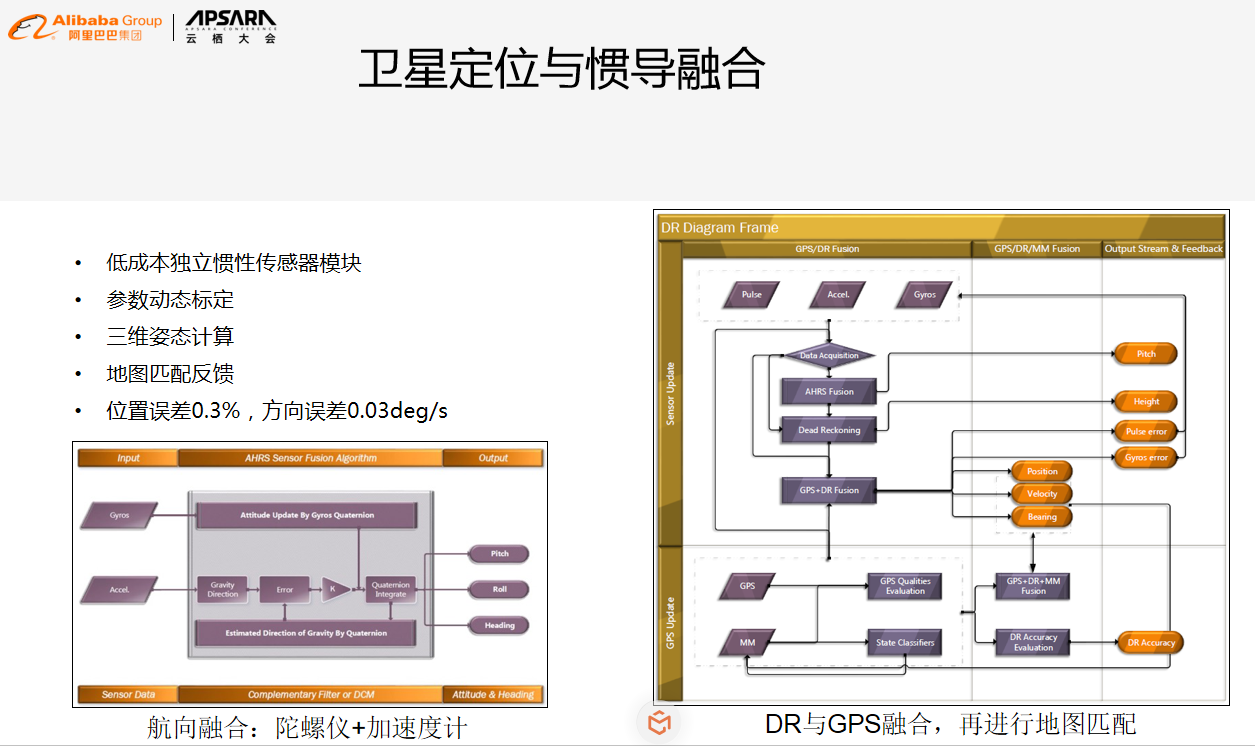
我們的解決辦法分成三個步驟,首先是航向融合,陀螺儀有相對的角度可以算出來,加速器可以算出地球引力的方向,這兩個結合以后就可以建立一個濾波方程,把真實的方向持續不斷的輸出,第二,把三維的方向和GPS的結果進行一次融合,就可以計算出修正后的位置,第三步,再和地圖匹配做對比,因為我們知道它的方向、位置以后,就知道它是在上坡還是下坡,是在高架上還是高架下,還有一點,匹配后的位置跟GPS原始位置做對比,如果差別很大,GPS可能發生了偏移,我們就把GPS舍棄掉,只用慣性導航推算,
這里面有三個特點,第一,引數動態標定,不需要對器件有初始的標的,我們通過三維的計算出方向,用地圖匹配反饋,關于地圖匹配的部分,核心是我們利用HMM的演算法進行位置的匹配,推算每個點的道路,這里面比較關鍵的概率,一個是發射概率,一個是位置轉移概率,
第二,我們把角度也考慮進來,角度的變化同樣用于決策轉移概率,這里面跟位置轉移概率的區別就是引入了速度做變數,不同的速度下,發生轉角的概率是不一樣的,速度慢了可能會轉向,速度快也可能轉向,所以我們針對每個速率都有一個曲線,

上圖是定位效果,紅色的點是實際修正后的軌跡,藍色的點是原始的GPS點,下面是在高架下的效果,可以看到高架下GPS點已經非常發散了,飄的到處都是,但是修正之后跟綠色的點是重疊的,下面的圖是在停車場里,在停車場進去的時候,藍色的點就已經消失了,但是紅色的點可以很好的還原出用戶在停車場里持續的軌跡,
高精定位方面,高德主要建立兩種定位能力,一種是基于影像定位,一種是基于融合定位,影像定位是只用影像就可以形成比較好的分米級精度,融合定位主要是引入了兩個新的定位技術,一個是VSLAM,一個是差分GPS,這兩個方法分別應用于有GPS和沒有GPS的情況,可以提供很好的精度,VSLAM可以做到誤差很小,因為可以有影像的方法進行修正,
自動駕駛是一個方向,并且需要從輔助駕駛過渡到自動駕駛,但系統性變化到來之前會有階段性的變化,就是服務于人的導航服務的精細化,即車道級導航,車道級導航需要高精地圖,至少是分米級的精度,
對未來定位技術發展的理解,基礎能力部分,我們認為5G的出現會為定位提供一種新的可能性,因為5G的頻率比4G更高,波長會更短,它可以測距,以前基于基站和Wifi的定位都是基于信號強度的,但是5G支持了測距以后,它就可以提供一個很好的精度,所以可能會出現一種方式,基于5G的定位可以達到類似GPS的效果,

第二是融合定位,隨著各種新的資料源不斷出現,用新的演算法去發揮不同資料源的特點,從而達到整體效果的提升,駕車部分,視覺定位和差分GPS技術的逐漸普及,室內部分,有超寬帶的定位,除此之外還有藍牙和Wifi的精準定位,在最新的技術標準里,也都支持了測距和測角的技術,也就是未來新的藍牙或者Wifi的APP,可能就能提供一部分的定位能力,
所以,未來10年內,我們可能會看到這幾種方式相互融合,精度會得到質的改變,以上就是我介紹的內容,謝謝大家!

關注高德技術,找到更多出行技術領域專業內容轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/67691.html
標籤:其他
上一篇:神經網路學習筆記(2)