記得剛開始學TensorFlow的時候,那給我折磨的呀,我一直在想這個TensorFlow官方為什么搭建個網路還要畫什么靜態圖呢,把簡單的事情弄得麻煩死了,直到這幾天我開始接觸Pytorch,發現Pytorch是就是不用搭建靜態圖的Tensorflow版本,就想在用numpy一樣,并且封裝了很多深度學習高級API,numpy資料和Tensor資料相互轉換不用搭建會話了,只需要一個轉換函式,搭建起了numpy和TensorFlow愛的橋梁,
Pytorch自17年推出以來,一度有趕超TensorFlow的趨勢,是因為Pytorch采用動態圖機制,替代Numpy使用GPU的功能,搭建網路靈活,
Pytorch和TensorFlow的區別:
- TensorFlow是基于靜態計算圖的,靜態計算圖是先定義后運行,一次定義多次運行(Tensorflow 2.0也開始使用動態計算圖)
- PyTorch是基于動態圖的,是在運行的程序中被定義的,在運行的時候構建,可以多次構建多次運行
上手難度:tensorflow 1 > tensorflow 2 > pytorch
工業界:tensorflow 1>tensorflow 2 > pytorch
學術界:pytorch > tesnroflow 2 > tesnorflow 1(已經被谷歌拋棄)
pytorch的優點
- GPU加速
- 自動求導
- 常用網路層
如何表達字串:1、one-hot,如果詞庫很大會造成矩陣很大,占記憶體,2、embeding(word2vec、glove)
pytorch的資料型別
| Data type |
CPU tensor |
GPU tensor |
| torch.float32 | torch.FloatTensor | torch.cuda.FloatTensor |
| torch.floar64 | torch.DoubleTensor | torch.cuda.DoubleTensor |
| torch.int32 | torch.IntTensor | torch.cuda.IntTensor |
| torch.int64 | torch.LongTensor | torch.cuda.LongTensor |
即便是同一個變數同時部署在CPU和GPU上面是不一樣的
這篇文章的所有代碼,請務必手敲!!!
安裝
這個網址包含pytorch與cuda的對應關系
由于我的cuda是 10.0
我選擇的安裝命令是:
pip install torch==1.4.0 torchvision==0.5.0 -f https://download.pytorch.org/whl/torch_stable.html
pip install torch==1.4.0+cu100 torchvision==0.5.0+cu100 -f https://download.pytorch.org/whl/torch_stable.html
pip install pytorch torchvision cuda100 -c pytorch
官網給的安裝命令是:
pip install torch==1.2.0 torchvision==0.4.0 -f https://download.pytorch.org/whl/torch_stable.html
創建張量
torch的資料型別torch.float32、torch.floar64、torch.float16、torch.int8、torch.int16、torch.int32、torch.int64,當資料在GPU上時,資料型別需要加上cuda,例:torch.cuda.FloatTensor
tesnor.dim():求張量的階數
tensor.shape/tensor.size():獲取張量的shape
tensor.reshape()/tensor.view():修改張量的shape
tesnor.item():如果我們的張量只有一個數值,可以使用.item()獲取,多用于神經網路損失值
import torch a = torch.randn(2, 3) print(a.type()) # torch.FloatTensor a = a.cuda() print(a.type()) # torch.cuda.FloatTensor
0階\0維 張量
a = torch.tensor(1.3) print(a) # tensor(1.3000) print(a.shape) # torch.Size([]) print(a.size()) # torch.Size([]) print(len(a.shape)) # 0
1階張量
a = torch.tensor([1.1]) b = torch.tensor([1.1, 2.2]) print(a) # tensor([1.1000]) print(b) # tensor([1.1000, 2.2000]) print(torch.FloatTensor(1)) # 1個亂數 # tensor([0.]) print(torch.FloatTensor(2,2)) # 兩行兩列的亂數 # tensor([[ 0.0000e+00, 0.0000e+00], # [-1.5690e-31, 4.5909e-41]])
將numpy資料轉換為torch資料
x = np.array([[1, 2], [3, 4]]) y = torch.from_numpy(x) # 轉換為 torch資料 z = y.numpy() # 轉換為 numpy 資料
2階張量
a = torch.randn(2,3) print(a) # tensor([[ 0.6078, -0.0300, 0.8677], # [ 0.4085, -2.9589, -0.0837]]) print(a.shape) # torch.Size([2, 3]) print(a.size(0)) # 2 print(a.size(1)) # 3 print(a.shape[1]) # 3
3階
多用于RNN、input、batch
a = torch.rand(1, 2, 3) print(a) # tensor([[[0.9094, 0.8469, 0.2710], # [0.7306, 0.3788, 0.9464]]]) print(a.shape) # torch.Size([1, 2, 3]) print(a[0]) # tensor([[0.9094, 0.8469, 0.2710], # [0.7306, 0.3788, 0.9464]])
4階
a = torch.rand(2,3,28,28) print(a) # tensor([[[[0.7709, 0.7338, 0.7997, ..., 0.2025, 0.2864, 0.1989], # [0.8917, 0.0605, 0.4229, ..., 0.7809, 0.9371, 0.0639], # [0.1946, 0.0166, 0.9767, ..., 0.9593, 0.2626, 0.9426], # ..., # ..., # [0.4095, 0.3448, 0.9255, ..., 0.6079, 0.8952, 0.0065], # [0.7871, 0.9928, 0.6331, ..., 0.7503, 0.6191, 0.8684], # [0.5359, 0.3247, 0.8745, ..., 0.7800, 0.8538, 0.7997]]]]) print(a.shape) # torch.Size([2, 3, 28, 28]) print(a.dim()) # 4
將numpy資料轉換為torch資料
torch.from_numpy()
a = np.array([2, 3, 3]) print(torch.from_numpy(a)) # tensor([2, 3, 3], dtype=torch.int32) a = np.ones([2, 3]) print(torch.from_numpy(a)) # tensor([[1., 1., 1.], # [1., 1., 1.]], dtype=torch.float64)
直接指定tensor的數值
print(torch.tensor([2.,3.2])) # tensor([2.0000, 3.2000]) print(torch.FloatTensor([2.,3.2])) # tensor([2.0000, 3.2000]) print(torch.tensor([[2.,3.2],[1.,22.3]])) # tensor([[ 2.0000, 3.2000], # [ 1.0000, 22.3000]])
定義未初始化張量
print(torch.empty(2,3)) # tensor([[2.5657e-05, 6.3199e-43, 2.5657e-05], # [6.3199e-43, 2.5855e-05, 6.3199e-43]]) print(torch.FloatTensor(2,3)) # tensor([[2.5804e-05, 6.3199e-43, 8.4078e-45], # [0.0000e+00, 1.4013e-45, 0.0000e+00]]) print(torch.IntTensor(2,3)) # tensor([[937482688, 451, 1], # [ 0, 1, 0]], dtype=torch.int32)
設定tensor資料的默認型別type
print(torch.tensor([1.2,3]).type()) torch.set_default_tensor_type(torch.DoubleTensor) print(torch.tensor([1.3,3]).type())
torch.ones(size)/zero(size)/eye(size):回傳全為1/0/單位對角 張量
>>> torch.ones(2, 3) tensor([[ 1., 1., 1.], [ 1., 1., 1.]]) >>> torch.ones(5) tensor([ 1., 1., 1., 1., 1.])
torch.full(size, fill_value):回傳以size大小填充fill_value的張量
torch.rand(size):回傳[0, 1)之間的均勻分布 張量
torch.randn(size):均值為0,方差為1的正態分布
torch.*_like(input):回傳一個和input shape一樣的張量,*可以為rand、randn...
torch.randint(low=0, high, size):回傳shape=size,[low, high)之間的隨機整數
torch.arange():和np.arange類似用法
torch.linspace(start, end, step=1000):回傳start和end之間等距steps點的一維步長張量,
torch.logspace(start, end, steps=1000, base=10.0):回傳$base^{start}$和$base^{end}$之間等距steps點的一維步長張量,
torch.randperm(n):回傳從0到n-1的整數的隨機排列
b = torch.rand(4) idx = torch.randperm(4) print(b) # tensor([0.0224, 0.7826, 0.5529, 0.2261]) print(idx) # tensor([0, 2, 1, 3]) print(b[idx]) # tensor([0.5573, 0.6121, 0.6581, 0.1892])
索引與切片操作
a = torch.rand(4, 3, 28, 28) print(a.shape) # torch.Size([4, 3, 28, 28]) # 索引 print(a[0, 0].shape) # torch.Size([28, 28]) print(a[0, 0, 2, 4]) # tensor(0.1152) # 切片 print(a[:2].shape) # torch.Size([2, 3, 28, 28]) print(a[:2, :2, :, :].shape) # torch.Size([2, 2, 28, 28]) print(a[:2, -1:, :, :].shape) # torch.Size([2, 1, 28, 28]) # ...的用法 print(a[...].shape) # torch.Size([4, 3, 28, 28]) print(a[0, ...].shape) # torch.Size([3, 28, 28]) print(a[:, 1, ...].shape) # torch.Size([4, 28, 28]) print(a[..., :2].shape) # torch.Size([4, 3, 28, 2])
掩碼取值
x = torch.rand(3, 4) # tensor([[0.0864, 0.8583, 0.9847, 0.6263], # [0.4546, 0.1105, 0.5902, 0.7919], # [0.3894, 0.8882, 0.3354, 0.1561]]) mask = x.ge(0.5) # ge 是符號 > # tensor([[False, True, True, True], # [False, False, True, True], # [False, True, False, False]]) print(torch.masked_select(x, mask)) # tensor([0.8583, 0.9847, 0.6263, 0.5902, 0.7919, 0.8882])
通過torch.take取值
src = https://www.cnblogs.com/LXP-Never/p/torch.tensor([[4,3,5],[6,7,8]]) print(torch.take(src, torch.tensor([0,2,5]))) # tensor([4, 5, 8])
維度變換
torch tensor有兩個維度變換方法
- tensor.reshape()
- tensor.view()
squeeze:去除對應維度為1的維度
unsqueeze:往對應位置索引插入一個維度
a = torch.rand(4, 1, 28, 28) b = a.unsqueeze(0) print(b.shape) # torch.Size([1, 4, 1, 28, 28]) a = torch.rand(4, 1, 1, 28) b = a.squeeze() print(b.shape) # torch.Size([4, 28]) b = a.squeeze(1) print(b.shape) # torch.Size([4, 1, 28])
tensor.expand(*size):回傳具有單個尺寸擴展到更大尺寸的張量
tesnor.repeat(*size):沿指定尺寸重復此張量
x = torch.tensor([[1], [2], [3]]) print(x.size()) # torch.Size([3, 1]) print(x.expand(3, 4)) # tensor([[ 1, 1, 1, 1], # [ 2, 2, 2, 2], # [ 3, 3, 3, 3]]) print(x.expand(-1, 4)) # -1表示不改變維度的大小 # tensor([[ 1, 1, 1, 1], # [ 2, 2, 2, 2], # [ 3, 3, 3, 3]]) b = torch.tensor([1, 2, 3]) # torch.Size([1, 3]) print(b.repeat(4, 2).shape) # torch.Size([4, 6]) print(b.repeat(4, 2, 1).size()) # torch.Size([4, 2, 3])
tensor.transpose():調換張量指定維度的順序
tensor.permute():將張量按指定順序排列
b = torch.rand(4, 3, 28, 32) print(b.transpose(1, 3).shape) # torch.Size([4, 32, 28, 3]) print(b.permute(0, 2, 3, 1).shape) # torch.Size([4, 28, 32, 3])
數學運算
加法
a = torch.rand(3,4) b = torch.rand(4) # dim=1 # 加法 print(a+b) print(torch.add(a,b)) # 減法 print(a-b) print(torch.sub(a,b)) # 乘法 a = torch.rand(2,3) b = torch.rand(2,3) # dim=1 print(a*b) # 對應元素相乘 a = torch.rand(2,3) b = torch.rand(3,2) # dim=1 # 矩陣相乘 print(torch.mm(a,b)) # shape=(2,2) print(torch.matmul(a,b)) # shape=(2,2) print(a@b) # shape=(2,2)
平方
a = torch.full([2,2], 2) # 創建一個shape=[2,2]值為2的陣列 print(a.pow(2)) print(a**2)
平方根
a = torch.full([2,2], 4) # 創建一個shape=[2,2]值為2的陣列 print(a.sqrt()) # 平方根 print(a**(0.5))
e的指數冥:torch.exp()
取對數:torch.log()
tensor.floor():向下取整
tensor.ceil() :向上取整
tensor.round():四舍五入
tensor.trunc():取整數值
tensor.frac():取小數值
tensor.clamp(min,max):不足最小值的變成最小值,大于最大值的變成最大值
torch.mean():求均值
torch.sum():求和
torch.max\torch.min:求最大最小值
torch.prod(input, dtype=None) :回傳input中所有元素的乘積
torch.argmin(input)\torch.argmax(input):回傳input張量中所有元素的最小值\最大值的索引
torch.where(condition, x, y):如果符合條件回傳x,如果不符合條件回傳y
torch.gather(input, dim, index):沿dim指定的軸收集值
- input:輸入tensor
- dim:索引所沿的軸
- index:要收集的元素的索引
t = torch.tensor([[1,2],[3,4]]) torch.gather(t, 1, torch.tensor([[0,0],[1,0]])) # tensor([[ 1, 1], # [ 4, 3]])
autograd:自動求導
autograd 包為張量上的所有操作提供了自動求導機制,它是一個在運行時定義(define-by-run)的框架,這意味著反向傳播是根據代碼如何運行來決定的,并且每次迭代可以是不同的.
讓我們用一些簡單的例子來看看吧,
張量
如果torch.Tesnor 的屬性 .requires_grad 設定為True,那么autograd 會追蹤對于該張量的所有操作,當完成計算后可以通過呼叫 .backward(),來自動計算所有的梯度,這個 torch.Tensor 張量的所有梯度將會自動累加到 .grad屬性上,
如果要阻止一個張量被跟蹤歷史,可以呼叫 .detach() 方法將其與計算歷史分離,并阻止它未來的計算記錄被跟蹤,
為了防止跟蹤歷史記錄(和使用記憶體),可以將代碼塊包裝在 with torch.no_grad(): 中,在評估模型時特別有用,因為模型可能具有 requires_grad = True 的可訓練的引數,但是我們不需要在此程序中對他們進行梯度計算,
Tensor 和 Function 互相連接生成了一個無圈圖(acyclic graph),它編碼了完整的計算歷史,每個張量都有一個 .grad_fn 屬性,該屬性參考了創建 Tensor 自身的Function(除非這個張量是用戶手動創建的,即這個張量的 grad_fn 是 None ),
如果需要計算導數,可以在 Tensor 上呼叫 .backward(),如果 Tensor 是一個標量(即它包含一個元素的資料),則不需要為 backward() 指定任何引數,但是如果它有更多的元素,則需要指定一個 gradient 引數,該引數是形狀匹配的張量,
有一部分有點難,需要多看幾遍,
https://pytorch.apachecn.org/docs/1.2/beginner/blitz/autograd_tutorial.html
如果設定torch.tensor_1(requires_grad=True),那么會追蹤所有對該張量tensor_1的所有操作,
import torch # 創建一個張量并設定 requires_grad=True 用來追蹤他的計算歷史 x = torch.ones(2, 2, requires_grad=True) print(x) # tensor([[1., 1.], # [1., 1.]], requires_grad=True)
當Tensor完成一個計算程序,每個張量都會自動生成一個.grad_fn屬性
# 對張量進行計算操作,grad_fn已經被自動生成了, y = x + 2 print(y) # tensor([[3., 3.], # [3., 3.]], grad_fn=<AddBackward>) print(y.grad_fn) # <AddBackward object at 0x00000232535FD860> # 對y進行一個乘法操作 z = y * y * 3 out = z.mean() print(z) # tensor([[27., 27.], # [27., 27.]], grad_fn=<MulBackward>) print(out) # tensor(27., grad_fn=<MeanBackward1>)
.requires_grad_(...) 可以改變張量的requires_grad屬性,
import torch a = torch.randn(2, 2) a = ((a * 3) / (a - 1)) print(a.requires_grad) # 默認是requires_grad = False a.requires_grad_(True) print(a.requires_grad) # True b = (a * a).sum() print(b.grad_fn) # <SumBackward0 object at 0x000002325360B438>
梯度
回顧到上面
import torch # 創建一個張量并設定 requires_grad=True 用來追蹤他的計算歷史 x = torch.ones(2, 2, requires_grad=True) print(x) # tensor([[1., 1.], # [1., 1.]], requires_grad=True) # 對張量進行計算操作,grad_fn已經被自動生成了, y = x + 2 print(y) # tensor([[3., 3.], # [3., 3.]], grad_fn=<AddBackward>) print(y.grad_fn) # <AddBackward object at 0x00000232535FD860> # 對y進行一個乘法操作 z = y * y * 3 out = z.mean() print(z) # tensor([[27., 27.], # [27., 27.]], grad_fn=<MulBackward>) print(out) # tensor(27., grad_fn=<MeanBackward1>)
讓我們來反向傳播,運行 out.backward() ,等于out.backward(torch.tensor(1.))
對out進行反向傳播,$out = \frac{1}{4}\sum_i z_i$,其中$z_i = 3(x_i+2)^2$,因為方向傳播中torch.tensor=1(out.backward中的引數)因此$z_i\bigr\rvert_{x_i=1} = 27$
對于梯度$\frac{\partial out}{\partial x_i} = \frac{3}{2}(x_i+2)$,把$x_i=1$代入$\frac{\partial out}{\partial x_i}\bigr\rvert_{x_i=1} = \frac{9}{2} = 4.5$
print(out) # tensor(27., grad_fn=<MeanBackward1>) print("*"*50) out.backward() # 列印梯度 print(x.grad) # tensor([[4.5000, 4.5000], # [4.5000, 4.5000]])
對吃栗子找到規律,才能看懂
import torch x = torch.randn(3, requires_grad=True) y = x * 2 while y.data.norm() < 1000: y = y * 2 print(y) # tensor([-920.6895, -115.7301, -867.6995], grad_fn=<MulBackward>) gradients = torch.tensor([0.1, 1.0, 0.0001], dtype=torch.float) # 把gradients代入y的反向傳播中 y.backward(gradients) # 計算梯度 print(x.grad) # tensor([ 51.2000, 512.0000, 0.0512])
為了防止跟蹤歷史記錄,可以將代碼塊包裝在with torch.no_grad():中, 在評估模型時特別有用,因為模型的可訓練引數的屬性可能具有requires_grad = True,但是我們不需要梯度計算,
print(x.requires_grad) # True print((x ** 2).requires_grad) # True with torch.no_grad(): print((x ** 2).requires_grad) # False
神經網路
神經網路是基于自動梯度 (autograd)來定義一些模型,一個 nn.Module 包括各個層和一個 forward(input) 方法,它會回傳output,
神經網路訓練程序包括以下幾點:
- 定義一個包含可訓練引數的神經網路
- 迭代整個輸入
- 通過神經網路處理輸入
- 計算損失(loss)
- 反向傳播梯度到神經網路的引數
- 更新網路的引數,典型的用一個簡單的更新方法:weight = weight - learning_rate *gradient
定義網路
我們先來定義一個網路,處理輸入,呼叫backword
import torch import torch.nn as nn import torch.nn.functional as F class Net(nn.Module): def __init__(self): super(Net, self).__init__() # 輸入影像channel:1,輸出channel:6; 5*5卷積核 self.conv1 = nn.Conv2d(1, 6, 5) self.conv2 = nn.Conv2d(6, 16, 5) self.fc1 = nn.Linear(16 * 5 * 5, 120) self.fc2 = nn.Linear(120, 84) self.fc3 = nn.Linear(84, 10) def forward(self, x): # 前向傳播 x = F.max_pool2d(F.relu(self.conv1(x)), (2, 2)) # 如果核大小是正方形,則只能指定一個數字 x = F.max_pool2d(F.relu(self.conv2(x)), 2) x = x.view(-1, self.num_flat_features(x)) # reshape 成二維,方便做全連接操作 x = F.relu(self.fc1(x)) x = F.relu(self.fc2(x)) x = self.fc3(x) return x def num_flat_features(self, x): size = x.size()[1:] # 除去 batch 維度的其他維度 num_features = 1 for s in size: num_features *= s return num_features net = Net() # 列印模型結構 print(net) # Net( # (conv1): Conv2d(1, 6, kernel_size=(5, 5), stride=(1, 1)) # (conv2): Conv2d(6, 16, kernel_size=(5, 5), stride=(1, 1)) # (fc1): Linear(in_features=400, out_features=120, bias=True) # (fc2): Linear(in_features=120, out_features=84, bias=True) # (fc3): Linear(in_features=84, out_features=10, bias=True))
我們只需要定義 forward 函式,backward函式會在使用autograd時自動被定義,backward函式用來計算導數,可以在 forward 函式中使用任何針對張量的操作和計算,
一個模型可訓練的引數可以通過呼叫 net.parameters() 回傳:
params = list(net.parameters()) print(len(params)) # 10 print(params[0].size()) # 第一個卷積層的權重 torch.Size([6, 1, 3, 3])
讓我們隨機生成一個 shape=(1, 1, 32, ,32) 的資料輸入模型
# 輸入shape格式:[batch_size, nChannels, Height, Width] input = torch.randn(1, 1, 32, 32) out = net(input) print(out.shape) # torch.Size([1, 10]) print(out) # tensor([[ 0.0227, -0.0823, 0.1665, 0.2153, 0.0732, 0.0471, 0.0019, 0.0664, # -0.0576, 0.0238]], grad_fn=<AddmmBackward>)
清零所有引數的梯度快取,然后進行隨機梯度的反向傳播:
net.zero_grad() # 把所有引數梯度快取器置零 out.backward(torch.randn(1, 10)) # 用隨機的梯度來反向傳播
損失函式
我們這里計算均方誤差 $loss=nn.MSELoss(模型預測值-目標)$
output = net(input) # torch.Size([1, 10]) target = torch.randn(10) # 生成一個隨機資料作為target target = target.reshape(1,-1) # [1, 10] mse_loss = nn.MSELoss() loss_value = mse_loss(output, target) print(loss_value) # tensor(0.5513, grad_fn=<MseLossBackward>)
現在,如果使用loss的.grad_fn屬性跟蹤反向傳播程序,會看到計算圖如下:
input -> conv2d -> relu -> maxpool2d -> conv2d -> relu -> maxpool2d -> view -> linear -> relu -> linear -> relu -> linear -> MSELoss -> loss
所以,當我們呼叫loss.backward(),整張圖開始關于loss微分,圖中所有設定了requires_grad=True的張量的.grad屬性累積著梯度張量,
為了說明這一點,讓我們向后跟蹤幾步:
print(loss.grad_fn) # MSELoss # <MseLossBackward object at 0x7fab77615278> print(loss.grad_fn.next_functions[0][0]) # Linear # <AddmmBackward object at 0x7fab77615940> print(loss.grad_fn.next_functions[0][0].next_functions[0][0]) # ReLU # <AccumulateGrad object at 0x7fab77615940>
反向傳播
為了實作損失函式的梯度反向傳播,我們需要使用 loss.backward() 來反向傳播權重,我們需要清零現有的梯度,否則梯度將會與已有的梯度累加,
現在,我們將呼叫loss.backward(),并查看conv1層的偏置(bias)在反向傳播前后的梯度,
net.zero_grad() # 清零所有引數的梯度 print('反向傳播之前的 conv1.bias.grad 梯度') print(net.conv1.bias.grad) # tensor([0., 0., 0., 0., 0., 0.]) loss.backward() print('反向傳播之后的 conv1.bias.grad 梯度') print(net.conv1.bias.grad) # tensor([-0.0118, 0.0125, -0.0085, -0.0225, 0.0125, 0.0235])
更新權重
最簡單的更新規則是隨機梯度下降法(SGD):
weight = weight - learning_rate * gradient
我們先簡單的的使用python代碼來實作一下:
learning_rate = 0.01 for f in net.parameters(): f.data.sub_(f.grad.data * learning_rate)
方式在pytorch中官方有一個優化器包torch.optim,包含了不同的優化器:SGD、Nesterov-SGD、Adam、RMSProp等,使用方法如下
import torch.optim as optim optimizer = optim.SGD(net.parameters(), lr=0.01) # 創建 SGD 優化器 optimizer.zero_grad() # 清零梯度快取 output = net(input) loss = criterion(output, target) # 損失函式 loss.backward() # 損失函式的梯度反向傳播 optimizer.step() # 更新引數
影像分類器
torch有一個叫做totchvision 的包,支持加載類似Imagenet,CIFAR10,MNIST 等公共資料集的資料加載模塊 torchvision.datasets
支持加載影像資料資料轉換模塊 torch.utils.data.DataLoader,
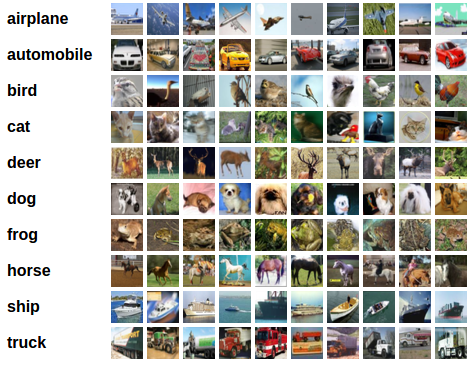
本節我們使用CIFAR10資料集,它包含十個類別:‘airplane’, ‘automobile’, ‘bird’, ‘cat’, ‘deer’, ‘dog’, ‘frog’, ‘horse’, ‘ship’, ‘truck’,CIFAR-10 中的影像尺寸為33232,也就是RGB的3層顏色通道,每層通道內的尺寸為32*32,
訓練一個影像分類器
pytorch創建了一個包torchvision,其中包含了針對Imagenet、CIFAR10、MNIST等常用資料集的資料加載器(data loaders),還有對圖片資料變形的操作,
這一節我們將訓練一個cifar10的影像分類器,步驟如下:
- 使用torchvision加載并且歸一化CIFAR10的訓練和測驗資料集
- 定義一個卷積神經網路
- 定義一個損失函式
- 在訓練樣本資料上訓練網路
- 在測驗樣本資料上測驗網路
1.加載并標準化CIFAR10
使用torchvision加載CIFAR10,torchvision 資料集的輸出是范圍在[0,1]之間的 PILImage,我們將他們轉換成歸一化范圍為[-1, 1]之間的張量 Tensors,
import torch import torchvision import torchvision.transforms as transforms transform = transforms.Compose( [transforms.ToTensor(), transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))]) # 下載訓練資料集 trainset = torchvision.datasets.CIFAR10(root='./data', train=True, download=True, transform=transform) # 下載測驗資料集 testset = torchvision.datasets.CIFAR10(root='./data', train=False, download=True, transform=transform) # 訓練集加載器 trainloader = torch.utils.data.DataLoader(trainset, batch_size=4, shuffle=True, num_workers=0) # 測驗集加載器 testloader = torch.utils.data.DataLoader(testset, batch_size=4, shuffle=False, num_workers=0) classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
現在讓我們可視化部分訓練資料
import matplotlib.pyplot as plt import numpy as np def imshow(img): img = img / 2 + 0.5 # 去標準化 npimg = img.numpy() # 轉換成numpy資料 plt.imshow(np.transpose(npimg, (1, 2, 0))) plt.show() # 隨機獲取圖片 dataiter = iter(trainloader) images, labels = dataiter.next() # 顯示圖片 imshow(torchvision.utils.make_grid(images)) # 列印圖片標簽 print("".join("%6s" % classes[labels[j]] for j in range(4))) # frog truck bird cat
2.定義卷積神經網路
將上一節定義的神經網路拿過來,并將其修改成輸入為3通道影像
import torch.nn as nn import torch.nn.functional as F class Net(nn.Module): def __init__(self): super(Net, self).__init__() self.conv1 = nn.Conv2d(3, 6, 5) self.pool = nn.MaxPool2d(2, 2) self.conv2 = nn.Conv2d(6, 16, 5) self.fc1 = nn.Linear(16 * 5 * 5, 120) self.fc2 = nn.Linear(120, 84) self.fc3 = nn.Linear(84, 10) def forward(self, x): x = self.pool(F.relu(self.conv1(x))) x = self.pool(F.relu(self.conv2(x))) x = x.view(-1, 16 * 5 * 5) x = F.relu(self.fc1(x)) x = F.relu(self.fc2(x)) x = self.fc3(x) return x net = Net()
3.定義損失函式和優化器
我們使用分類的交叉熵損失函式和隨機梯度下降SGD(使用momentum),
import torch.optim as optim criterion = nn.CrossEntropyLoss() # 損失函式實體化 optimizer = optim.SGD(net.parameters(), lr=0.001, momentum=0.9) # 優化器實體化
4.訓練網路
遍歷我們的資料迭代器,并將輸入“喂”給網路和優化函式,
for epoch in range(2): running_loss = 0.0 for i, data in enumerate(trainloader, 0): inputs, labels = data # 獲取資料 optimizer.zero_grad() # 清零引數的梯度 # --- forward + backward + optimize --- # outputs = net(inputs) # 前向傳播 loss = criterion(outputs, labels) # 計算損失 loss.backward() # 損失梯度反向傳播 optimizer.step() # 引數更新 running_loss += loss.item() # 每2000個小批量列印一次 if i % 2000 == 1999: print("[%d, %5d] loss: %.3f" % (epoch + 1, i+1, running_loss/2000)) running_loss = 0.0 print("訓練完成") # [1, 2000] loss: 2.182 # [1, 4000] loss: 1.819 # [1, 6000] loss: 1.648 # [1, 8000] loss: 1.569 # [1, 10000] loss: 1.511 # [1, 12000] loss: 1.473 # [2, 2000] loss: 1.414 # [2, 4000] loss: 1.365 # [2, 6000] loss: 1.358 # [2, 8000] loss: 1.322 # [2, 10000] loss: 1.298 # [2, 12000] loss: 1.282 # 訓練完成
5.使用測驗資料測驗網路
接來下對比神經網路輸出的標簽和正確樣本(ground-truth),并檢測網路的預測精度,如果預測是正確的,我們將樣本添加到正確預測的串列中,
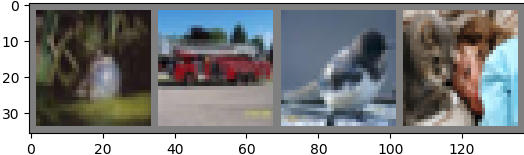
第一步,我們先顯示測驗集中的影像
# 測驗資料集 dataiter = iter(testloader) images, labels = dataiter.next() # Ground Truth imshow(torchvision.utils.make_grid(images)) print('GroundTruth: ', ' '.join('%5s' % classes[labels[j]] for j in range(4))) # GroundTruth: cat ship ship plane # 預測值 outputs = net(images) _, predicted = torch.max(outputs, 1) print('Predicted: ', ' '.join('%5s' % classes[predicted[j]] for j in range(4))) # Predicted: dog ship ship plane
預測對了兩個,讓我們看看網路在整個資料集上的表現,
correct = 0 total = 0 with torch.no_grad(): for data in testloader: images, labels = data # 測驗集圖片和標簽 # images.shape torch.Size([4, 3, 32, 32]) # labels.shape torch.Size([4]) outputs = net(images) # 預測標簽 torch.Size([4, 10]) # .data 回傳和outputs的相同資料tensor, 但不會加入到x的計算歷史里 _, predicted = torch.max(outputs.data, dim=1) # 回傳最大值和最大值的索引 total += labels.size(0) # 計算一共有多少個測驗資料集 # .item()得到一個元素張量里面的元素值 correct += (predicted == labels).sum().item() # 預測正確的數量 print('該網路對10000張測驗影像的精度: %d %%' % (100 * correct / total)) # 該網路對10000張測驗影像的精度: 55 %
正確率有55%,看來網路學到了東西,那么哪些是表現好的類呢?哪些是表現的差的類呢?
class_correct = list(0. for i in range(10)) class_total = list(0. for i in range(10)) with torch.no_grad(): for data in testloader: images, labels = data # images.shape torch.Size([4, 3, 32, 32]) # labels.shape torch.Size([4]) outputs = net(images) # 預測標簽 torch.Size([4, 10]) _, predicted = torch.max(outputs, 1) c = (predicted == labels).squeeze() # 去掉維數為1的的維度 for i in range(4): label = labels[i] class_correct[label] += c[i].item() class_total[label] += 1 for i in range(10): print('Accuracy of %5s : %2d %%' % ( classes[i], 100 * class_correct[i] / class_total[i])) # Accuracy of plane : 70 % # Accuracy of car : 70 % # Accuracy of bird : 28 % # Accuracy of cat : 25 % # Accuracy of deer : 37 % # Accuracy of dog : 60 % # Accuracy of frog : 66 % # Accuracy of horse : 62 % # Accuracy of ship : 69 % # Accuracy of truck : 61 %
在GPU上訓練
在GPU上訓練,我么要將神經網路轉到GPU上,前提條件是CUDA可以用,讓我們首先定義下我們的設備為第一個可見的cuda設備,
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu") # Assume that we are on a CUDA machine, then this should print a CUDA device: print(device) # cuda:0
然后這些方法將遞回遍歷所有模塊,并將它們的引數和緩沖區轉換為CUDA張量:
net.to(device)
請記住,我們不得不將輸入和目標在每一步都送入GPU:
inputs, labels = inputs.to(device), labels.to(device)
資料并行處理
在這一章節中我們教大家使用DataParallel來使用多GPU
我們把模型放入GPU中
device = torch.device("cuda: 0") # 實體化cuda設備 model.to(device)
將張量復制到GPU設備上:
mytensor = my_tensor.to(device)
PyTorch 默認只會使用一個 GPU,因此我們可以使用 DataParallel 讓模型在多個GPU上并行運行
model = nn.DataParallel(model)
輸入和引數
import torch import torch.nn as nn from torch.utils.data import Dataset, DataLoader input_size = 5 output_size = 2 batch_size = 30 data_size = 100 # 設備 device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
虛擬資料集
制造一個隨機的資料集,只需實作__getitem__,
class RandomDataset(Dataset): def __init__(self, size, length): self.len = length self.data = torch.randn(length, size) def __getitem__(self, index): return self.data[index] def __len__(self): return self.len rand_loader = DataLoader(dataset=RandomDataset(input_size, data_size), batch_size=batch_size, shuffle=True)
簡單模型
作為演示,我們的模型只接受一個輸入,執行一個線性操作,然后得到結果,然而,你能在任何模型(CNN,RNN,Capsule Net等)上使用DataParallel,
class Model(nn.Module): def __init__(self, input_size, output_size): super(Model, self).__init__() self.fc = nn.Linear(input_size, output_size) def forward(self, input): output = self.fc(input) print("In Model: input size", input.size(), "output size", output.size()) return output
創建模型和資料并行
我們先要檢查模型是否有多個GPU,如果有我們再使用nn.DataParallel,然后我們可以把模型放在GPU上model.to(device)
model = Model(input_size, output_size) # 模型實體化 if torch.cuda.device_count() >= 1: print("我們有", torch.cuda.device_count(), "個GPUs!") model = nn.DataParallel(model) # 設定資料并行 model.to(device) # 將模型放到cuda上面
運行模型,現在我們可以看到輸入和輸出張量的大小了
for data in rand_loader: input = data.to(device) # 將資料放到cuda上面 output = model(input) print("Outside: input size", input.size(), "output_size", output.size()) print("---------------------------------------------------------")
輸出
我們有 1 個GPUs! In Model: input size torch.Size([30, 5]) output size torch.Size([30, 2]) Outside: input size torch.Size([30, 5]) output_size torch.Size([30, 2]) --------------------------------------------------------- In Model: input size torch.Size([30, 5]) output size torch.Size([30, 2]) Outside: input size torch.Size([30, 5]) output_size torch.Size([30, 2]) --------------------------------------------------------- In Model: input size torch.Size([30, 5]) output size torch.Size([30, 2]) Outside: input size torch.Size([30, 5]) output_size torch.Size([30, 2]) --------------------------------------------------------- In Model: input size torch.Size([10, 5]) output size torch.Size([10, 2]) Outside: input size torch.Size([10, 5]) output_size torch.Size([10, 2]) ---------------------------------------------------------
當我們對30個輸入和輸出進行批處理時,我們和期望的一樣得到30個輸入和30個輸出,但是若有多個GPU,會得到如下的結果,
如果我們有2個GPU我們可以看到以下結果
我們有 2 個GPUs! In Model: input size torch.Size([15, 5]) output size torch.Size([15, 2]) In Model: input size torch.Size([15, 5]) output size torch.Size([15, 2]) Outside: input size torch.Size([30, 5]) output_size torch.Size([30, 2]) --------------------------------------------------------- In Model: input size torch.Size([15, 5]) output size torch.Size([15, 2]) In Model: input size torch.Size([15, 5]) output size torch.Size([15, 2]) Outside: input size torch.Size([30, 5]) output_size torch.Size([30, 2]) --------------------------------------------------------- In Model: input size torch.Size([15, 5]) output size torch.Size([15, 2]) In Model: input size torch.Size([15, 5]) output size torch.Size([15, 2]) Outside: input size torch.Size([30, 5]) output_size torch.Size([30, 2]) --------------------------------------------------------- In Model: input size torch.Size([5, 5]) output size torch.Size([5, 2]) In Model: input size torch.Size([5, 5]) output size torch.Size([5, 2]) Outside: input size torch.Size([10, 5]) output_size torch.Size([10, 2]) ---------------------------------------------------------
DataParallel自動的劃分資料,并將作業發送到多個GPU上的多個模型,DataParallel會在每個模型完成作業后,收集與合并結果然后回傳給你,
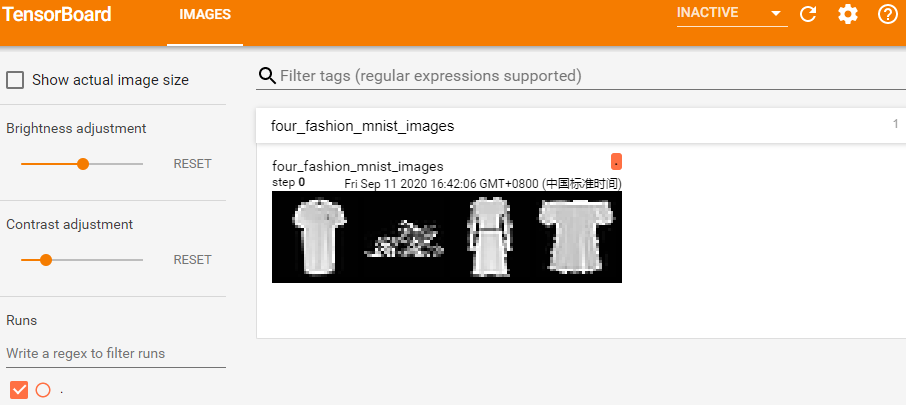
TensorBoard可視化
我通過from torch.utils.tensorboard import SummaryWriter匯入tensorboard有問題,因此我選擇通過tesnorboardX,
from tensorboardX import SummaryWriter
創建事件物件:writer = SummaryWriter(logdir)
寫入圖片資料:writer.add_image(tag, img_tensor, global_step=None)
寫入標量資料:writer.add_scalar(tag=, scalar_value, global_step=None)
關閉事件物件:writer.close()
在事件檔案夾 ./events 中打開cmd,輸入
tensorboard --logdir=runs # 或者 tensorboard --logdir "./"
然后在瀏覽器中輸入
https://localhost:6006/ 即可顯示,
保存和加載模型
torch.save:保存模型,序列化物件保存到磁盤,常見的PyTorch約定是使用.pt或 .pth檔案擴展名保存模型,
torch.load:加載模型,目標檔案反序列化到記憶體中
torch.nn.Module.load_state_dict:使用反序列化的state_dict 加載模型的引數字典
state_dict:python字典,包括具有可學習引數的層、每層的引數張量、優化器以及優化器超引數
為了充分了解state_dict,我們看下面例子:
import torch.nn as nn import torch.nn.functional as F from torch import optim class TheModelClass(nn.Module): def __init__(self): super(TheModelClass, self).__init__() self.conv1 = nn.Conv2d(3, 6, 5) self.pool = nn.MaxPool2d(2, 2) self.conv2 = nn.Conv2d(6, 16, 5) self.fc1 = nn.Linear(16 * 5 * 5, 120) self.fc2 = nn.Linear(120, 84) self.fc3 = nn.Linear(84, 10) def forward(self, x): x = self.pool(F.relu(self.conv1(x))) x = self.pool(F.relu(self.conv2(x))) x = x.view(-1, 16 * 5 * 5) x = F.relu(self.fc1(x)) x = F.relu(self.fc2(x)) x = self.fc3(x) return x model = TheModelClass() # 初始化模型 optimizer = optim.SGD(model.parameters(), lr=0.001, momentum=0.9) # 初始化optimizer print("Model的state_dict:") for param_tensor in model.state_dict(): print(param_tensor, "\t", model.state_dict()[param_tensor].size()) print("Optimizer的state_dict:") for var_name in optimizer.state_dict(): print(var_name, "\t", optimizer.state_dict()[var_name]) # Model的state_dict: # conv1.weight torch.Size([6, 3, 5, 5]) # conv1.bias torch.Size([6]) # conv2.weight torch.Size([16, 6, 5, 5]) # conv2.bias torch.Size([16]) # fc1.weight torch.Size([120, 400]) # fc1.bias torch.Size([120]) # fc2.weight torch.Size([84, 120]) # fc2.bias torch.Size([84]) # fc3.weight torch.Size([10, 84]) # fc3.bias torch.Size([10]) # Optimizer的state_dict: # state {} # param_groups [{'lr': 0.001, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0, 'nesterov': False, 'params': [3251954079208, 3251954079280, 3251954079352, 3251954079424, 3251954079496, 3251954079568, 3251954079640, 3251954079712, 3251954079784, 3251954079856]}]
推理模型的保存和加載
保存
torch.save(model.state_dict(), PATH)
加載
model = TheModelClass(*args, **kwargs)
model.load_state_dict(torch.load(PATH))
model.eval()
記住,model.eval()在運行推理之前,注意要將批處理規范化層設定為評估模式,
整個模型的保存和加載
保存
torch.save(model, PATH)
加載
model = torch.load(PATH)
model.eval()
記住,model.eval()在運行推理之前,注意要將批處理規范化層設定為評估模式,
保存和加載用于推理或繼續訓練的常規檢查點
保存
torch.save({ 'epoch': epoch, 'model_state_dict': model.state_dict(), 'optimizer_state_dict': optimizer.state_dict(), 'loss': loss, ... }, PATH)
加載
model = TheModelClass(*args, **kwargs) optimizer = TheOptimizerClass(*args, **kwargs) checkpoint = torch.load(PATH) model.load_state_dict(checkpoint['model_state_dict']) optimizer.load_state_dict(checkpoint['optimizer_state_dict']) epoch = checkpoint['epoch'] loss = checkpoint['loss'] model.eval() # 或 model.train()
常見的PyTorch約定是使用.tar檔案擴展名保存這些檢查點,
參考
Github一個Pytorch從入門到精通比較好的教程
PyTorch模型訓練實用教程
簡單易上手的PyTorch中文檔案:https://github.com/fendouai/pytorch1.0-cn
【檔案】
- 英文版官方檔案
- 中文版官方檔案
- PyTorch中文檔案
知乎pytorch搜索頁
【視頻】
- 莫煩pytorch
- [曉唦帶你讀]《動手學深度學習》(PyTorch版)完結!4萬播放
- pytorch 入門學習(目前見過最好的pytorch學習視頻)12萬播放
- 《PyTorch深度學習實踐》完結合集 4萬播放
如何成為Pytorch大神
- 學好深度學習的基礎知識
- 學習PyTorch官方tutorial
- 學習GitHub以及各種博客上的教程(別人創建好的list)
- 閱讀documentation,使用論壇 https://discuss.pytorch.org/
- 跑通以及學習開源PyTorch專案
- 閱讀深度學習模型paper,學習別人的模型實作
- 通過閱讀paper,自己實作模型
- 自己創造模型(也可以寫paper)
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/73700.html
標籤:其他
下一篇:讀---白話大資料與機器學習