
1、把小車平放在地板上,用資料里的虛擬機,打開一個終端 ssh 過去主控端啟動roslaunch znjrobot bringup.launch ,
2、再打開一個終端 ssh 過去主控端,啟動校正角速度命令rosrun znjrobot_nav calibrate_angular.py
3、在虛擬機端打開一個終端,直接運行 rosrun rviz rviz
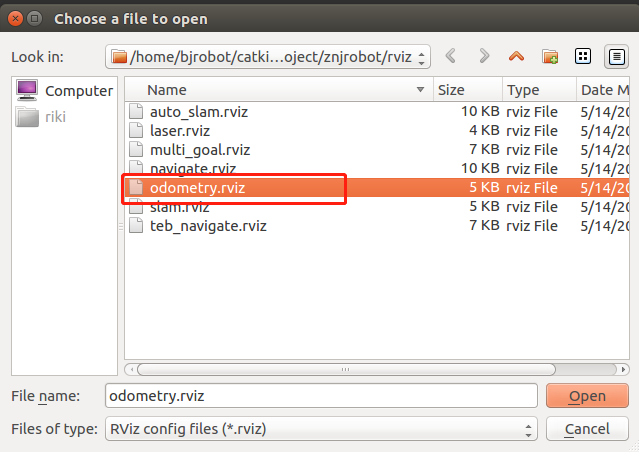
4、全屏化后點擊 File,點擊 Open Config:
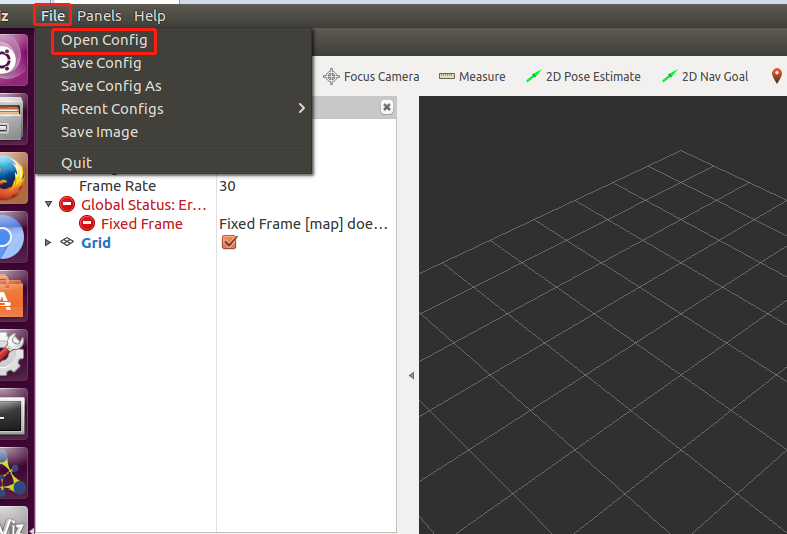
5、找到路徑下~/catkin_ws/src/znjrobot_project/znjrobot/rviz/ 的odometry.rviz 檔案,點 Open
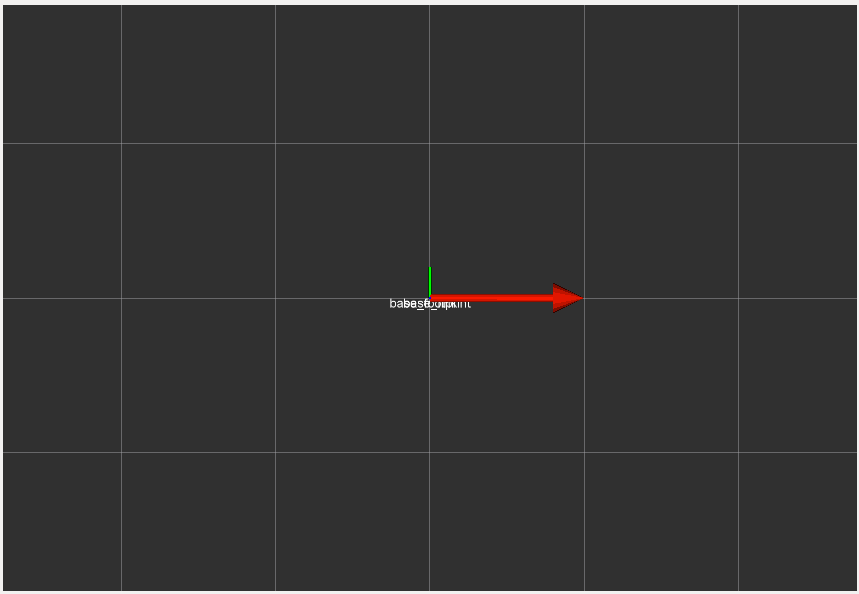
6、把 rviz 視窗調整到合適位置,調整方法:用滑鼠滾輪點住灰色區域,可以拖動地圖;滑鼠滾輪上下滾動可以放大縮小地圖;滑鼠左鍵點住灰色區域可以翻轉地圖,
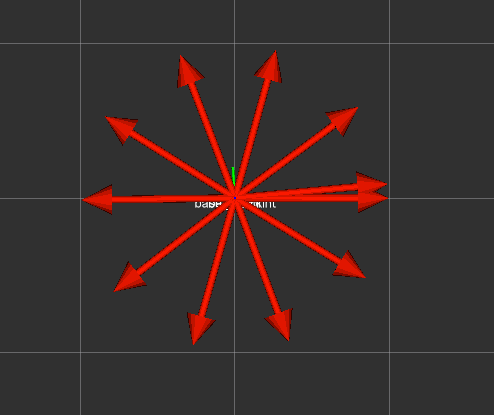
7、先記下手機指南針第一次的度數,比如:靜止時第一次手機指南針度數50 度,如果原地旋轉小車后(雙手托起小車),小車轉動后停下的度數超過 50,那么就是轉夠了一圈有多,如果小車轉動后停下的度數小于 50,那么就是沒有轉夠一圈,分以下兩種情況:
情況 1:小車停下后度數假如是 60 度,那么小車實際上是轉了 370 度,此時角速度比例系數 anguler_scale= 370/360 = 1.028
情況 2:小車停下后度數假如是 40 度,那么小車實際上是轉了 350 度,此時角速度比例系數 anguler_scale= 350/360 = 0.972
8、在主控端的 bringup.launch 檔案中把 anguler_scale 修改成實際計算好的角速度比例系數,

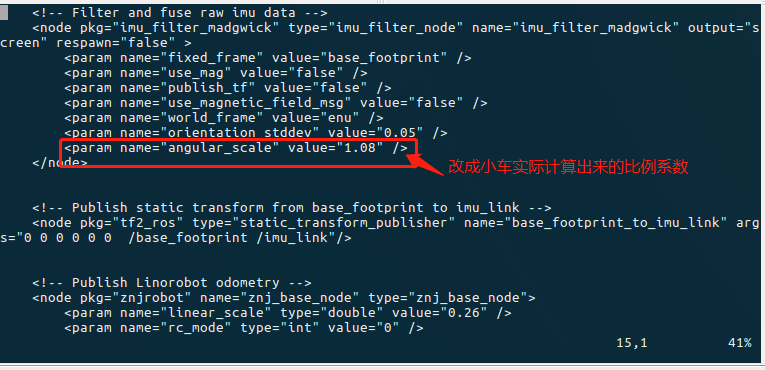
9、修改完成后,重新在主控端運行bringup.launch 、calibrate_angular.py檔案,以及虛擬機端的rviz檔案,然后第二次觀察手機指南針上面的度數,記下度數,再次原地轉動小車,小車實際轉動多少度,然后跟第二次的度數做對比,差值小于 10 度以內的都是差不多可以的,
更多精彩視頻演示和教程請點擊:https://space.bilibili.com/521688736


轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/83562.html
標籤:其他