當今社會,監控技術應用十分廣泛,但是很多監控設備大都處于戶外作業環境,而外界環境的多變性增加了監控的難度,典型的情況就是天氣因素,比如大霧,陰天等等,這些因素會增加監控的難度,甚至使系統無法正常作業,為了保證監控能夠在各種天氣條件下正常進行,研究影像增強技術具有重大意義,影像增強是一種基本的影像預處理手段,其目的是為了改善影像的質量,針對給定影像的模糊狀況以及它的應用場合,有目的的強調影像的整體或區域特性,提高影像可辨識度,改善人對影像的視覺效果,讓觀察者得到直觀清晰的、適合于分析的依據,使影像更有利于觀察和后期的分析處理,一般通過對影像的某些特征進行強調突出,從而顯示我們有需要的資訊,提高影像的使用價值和應用價值[1],不過值得注意的是,影像增強并不意味著能增加原始影像的資訊,甚至會損失一些資訊,但影像增強的結果卻能加強對特定資訊的識別能力,使影像中我們感興趣的特征得以加強,
大多數成像系統具有一定的亮度范圍,但實際情況中,由于各種因素的影響,影像常常表現為對比度不強、影像模糊不清,影像細節無法分辨的情況,所以我們需要通過某些演算法來調整對比度,亮度,增大影像的動態范圍,擴展影像對比度,改善影像的視覺效果,并最大程度上突出影像的細節資訊,影像增強技術一般可分為空域演算法和頻域演算法兩類,空域演算法是指直接對影像灰度級做運算,頻域演算法則通過FFT首先將影像變換到頻域,然后在頻域進行處理,對影像的變換系數值進行某種修正,是一種間接增強的演算法[2],
2.1 點運算影像增強
點運算處理是一種簡單的影像增強演算法處理技術,它通過改變像素點的灰度值來實作影像增強的效果,是影像增強的重要手段之一,通常情況下,點運算可以分為線性點運算和非線性點運算兩類,
線性點運算:輸出灰度級與輸入灰度級呈線性關系,其一般可以用如下的式子表示:
當a =1,b=0時,輸出影像與輸入影像相同,
當a>1時,輸出影像的對比度增強,
當a<1時,輸出影像的對比度減弱,
當a =1,b≠0時,輸出影像的整體像素點灰度級將增大或減小,
非線性運算:輸出灰度級與輸入灰度級呈非線性關系,其分為對數形式和指數形式,其運算式如下:
當原影像的灰度動態范圍較大的使用對數形式,
當需要對影像的高灰度區給予較大的擴展時使用,
點運算處理的最大有點就是處理簡單,即使在硬體上也非常方便的實作,但是其功能有限,無法處理影像的一些細節資訊,
我們將在MATLAB中來實作Retinex演算法,
>首先將圖片型別轉換為double型:
IM=double(image);
>將輸入的影像放在對數域中處理:
I=log(IM+1);
>將增強后的結果影像中的像素點的灰度值都初始化為一個常數:
const=mean2(image);
r(i,j)=const;
>在水平位置上,令h=width/2,計算與之間的相對明暗關系:
relation(i,j)=I(i,j+h)-I(i,j);
r(i,j)=r(i,j)-relation(i,j);
r(i,j+h)=r(i,j+h)+relation(i,j);
>在垂直位置上,令l=height/2,計算與之間的相對明暗關系:
relation(i,j)=I(i+l,j)-I(i,j);
r(i,j)=r(i,j)-relation(i,j);
r(i+l,j)=r(i+l,j)+relation(i,j);
>最后輸出:
mi=min(min(r));
ma=max(max(r));
Channel_out=(r-mi).*255/(ma-mi);
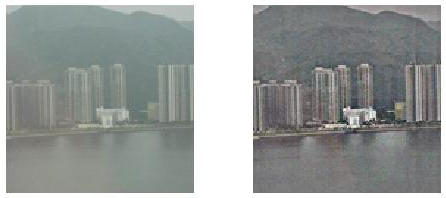
下面我們對多組測驗圖片進行仿真,其結果如下所示:


(c) (d)
(e) (f)
圖1 retinex增強前后的效果對比
圖3.1中a,c,e為增強前的模糊影像,b,d,f為增強后的影像,很明顯,影像得到了增強,很多細節部分能夠看的更加清楚,影像組中比較模糊的影像通過增強演算法之后也變得更加的清晰了,上面的仿真我們只是從定性上分析了影像增強的功能,下面我們將通過結果分析定量上分析影像增強的具體變化,從而深入了解影像retinex增強演算法的功能,
為了更進一步分析影像增強前后的影像變化,我們將對仿真結果進行分析,通常情況下,我們需要分析直方圖,熵值,
·灰度直方圖
任意選取一個圖片,通過其灰度直方圖進行增強分析,如圖2所示,
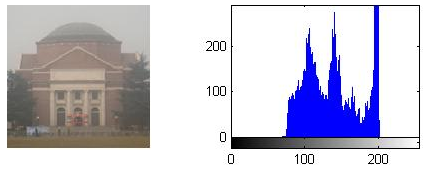
(a)增強前的影像和影像灰度直方圖
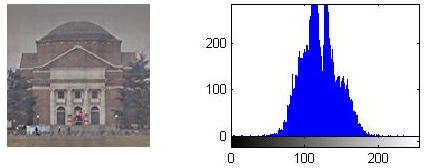
(b)增強后的影像和影像灰度直方圖
圖2灰度直方圖
通過上面的直方圖,我們可以看到增強前,直方圖幾種在100~200的范圍內,而且值的變化比較快,通過增強處理后,直方圖的值范圍變寬,而且變化變得更加的緩慢,這樣從視覺上看影像顯的更加的柔和,
·熵
影像的熵值反映了影像的資訊量,熵越大,資訊量就越大,那么對應的影像的細節越豐富,下面我們對增強前后的影像計算其熵,
我們分別計算三組測驗圖片的熵,其計算結果如表1所示:
表1 影像熵值
| 影像 | 增強前的熵 | 增強后的熵 |
| 01.jpg | 11.1352 | 13.4288 |
| 02.jpg | 10.9280 | 12.9896 |
| 03.jpg | 9.9702 | 12.8364 |
通過上表結果可知,通過影像增強之后,影像的熵明顯比增強前大,這說明影像增強對影像的細節有明顯的改善,
4.1 系統總體結構
本系統我們將在Altera公司的FPGA下開發,使用的軟體為QuartusII,系統主要包括串口接收模塊,影像存盤模塊,影像處理模塊和影像輸出模塊,系統的總體結構如下圖所示,
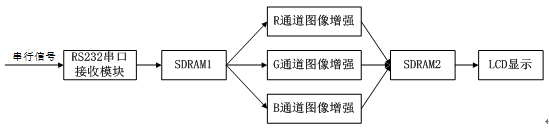
圖3 系統總體結構
其中影像處理模塊包括對數模塊,均值模塊,相關求解模塊,運算結果輸出模塊,本文我們首先將重點介紹影像處理模塊的各個功能,
本系統影像是通過串口輸入到FPGA中的,串口我們采用的是8位串行輸入,即每個串行信號輸入一個像素點,而對于彩色影像,則一個串行信號輸入R,G,B中一個通道的像素資訊,由于FPGA中資源有限,我們不可能像在MATLAB中做大規模的矩陣運算,我們需要修改該演算法,使其以流水線的方式在FPGA中正常運行,通常在FPGA中,我們將采用如下的結構對Retinex演算法進行實作,
圖4 FPGA硬體實作總體結構
從上面的結構,我們可以看到,此系統主要包括對數,自然指數以及亮度估計三個主要模塊,下面我們逐次進行介紹,
本系統考慮到DE2系統資源以及LCD顯示的問題,我們統一使用128*128像素的圖片資源進行設計與實作,圖片像素通過串口進入FPGA,存入SDRAM中,按照地址,存盤是按順序依次排列的,我們在發送影像的時候,按每行一次發送,則在MATLAB中對于某個像素點坐標(i,j),其對應的SDRAM地址為:128i+j-128,比如第2行第3列的像素點,其坐標則為131,這樣我們就可以對影像進行操作了,
我們通過查找表在FPGA中實作對數求解,由于影像的像素值在0~255之間,所以我們將輸入的數值作為地址,而地址中的值儲存對數結果,而對于對數結果的小數部分則通過放大的辦法使其得到整形,然后在最后的運行結果除以對數部分擴大的倍數即可,本系統我們將求對數的值擴大2^9倍,那么其他資料也將擴大2^9倍,擴展后的對數結果其運行位寬為12位,
其仿真波形如圖4所示,
圖4 log仿真結果
如圖4所示,當輸入的是1的時候,其地址為0,其對數值為0,當輸入的值為2,其地址為1,對應的值為0.6931,擴大2^9后值為354.8672,即仿真結果中的355,所以對數結果正確,
然后對自然指數進行查找表設計,由于影像中的像素值最大為255,所以在求指數查找表的時候,其指數最大為log(255)=5.5413,由于在求對數的時候,我們將數值擴到了2^9.即512倍,所以我們對應的指數最大值為5.5413*512=2837,即地址應該從0~2837,
其仿真波形如下圖5所示,

圖5 exp仿真結果
亮度的估計,我們在這里也是采用查表的方式進行解決,主要通過函式的像素值來通過查找表的方法來求得,
圖6 反射G值的仿真結果
由于亮度值比較小,為了防止在FPGA運行中有限字長效應導致截位后變0,所以我們將G擴大了2^16倍,然后最后的運行結果中再移位16即可,
最后我們只要將這三個模塊按照圖4的結構進行頂層模塊的呼叫就可實作影像增強系統,為了更能直觀的看到FPGA設計的結構,我們使用頂層原理圖模式對系統進行設計,頂層系統的基本結構如圖7所示,
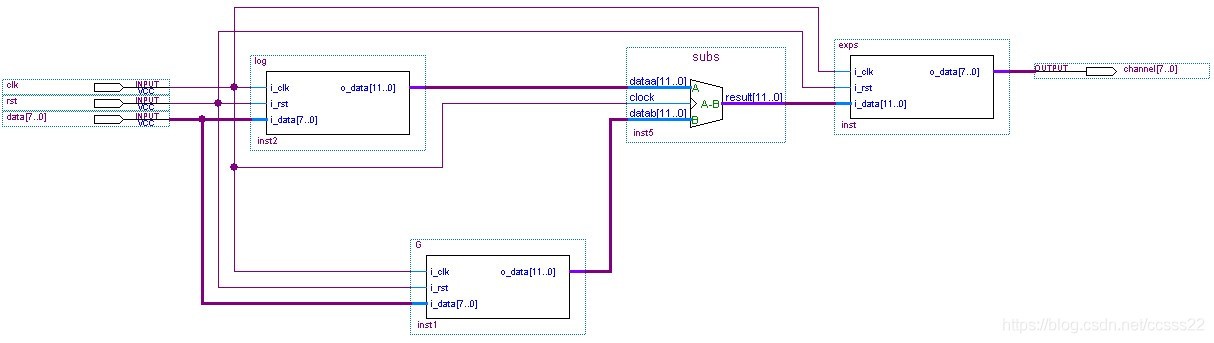
圖7 單個通道的影像增強模塊原理圖
其仿真結果如下所示:

圖8單個通道的影像增強模塊仿真圖
至此,我們完成一個通道的影像增強演算法的FPGA實作,只要對該模塊進行三次呼叫,我們就能實作彩色影像R,G,B三個通道的影像增強處理功能,
轉載請註明出處,本文鏈接:https://www.uj5u.com/shujuku/152878.html
標籤:其他
上一篇:Pytorch入門之張量