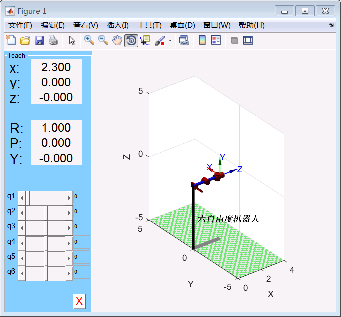
我用MDH方法建立了一個六自由度的機器人(一個移動關節和五個旋轉關節),模型如下圖,但是我的基座標到移動關節豎直方向的2000的高度不在了,也就是Z軸上少了2000,請問大佬怎么解決嗎?
clear;
clc;
% th d a alpha sigma offset
L(1) = Link([ 0 0 0 -pi/2 1 0 ],'modified');%定義連桿
L(2) = Link([ -pi/2 0 0 0 0 0 ],'modified');
L(3) = Link([ 0 0 1.08 0 0 -pi/2 ],'modified');
L(4) = Link([ 0 0.99 0 -pi/2 0 -pi/2 ],'modified');
L(5) = Link([ 0 0 0 pi/2 0 0 ],'modified');
L(6) = Link([ 0 0.23 0 -pi/2 0 0 ],'modified');
L(1).qlim=[0 1.5];
L(2).qlim=[-pi/2 pi/2];
L(3).qlim=[-pi/2 pi/2];
L(4).qlim=[-pi/2 pi/2];
L(5).qlim=[-pi/2 pi/2];
L(6).qlim=[-pi/2 pi/2];
bot= SerialLink(L, 'name', '六自由度機器人');%連接連桿
bot.display;
q=[0 0 0 0 0 0];
w=[0,4,-5,5,-5,5];
bot.plot(q,'workspace',w);
bot.teach;
uj5u.com熱心網友回復:
對了,第一個連桿d是2轉載請註明出處,本文鏈接:https://www.uj5u.com/gongcheng/52869.html
標籤:網絡編程
上一篇:VB6.0 使用可視化資料管理器 ACCESS 時,顯示ERROR 6 ,溢位
下一篇:VS2010中0x75d9c41f (KernelBase.dll) 處最可能的例外: Microsoft C++ 例外: 記憶體位置 0x001ee30c