目錄
1、硬體層
2、資料傳輸協議
3、作業程序
3.1、單個主設備連接多個從機
3.2、多個主設備連接多個從機
I2C(Inter-Integrated Circuit),中文應該叫集成電路總線,它是一種串行通信總線,使用多主從架構,是由飛利浦公司在1980年代初設計的,方便了主板、嵌入式系統或手機與周邊設備組件之間的通訊,由于其簡單性,它被廣泛用于微控制器與傳感器陣列,顯示幕,IoT設備,EEPROM等之間的通信,
I2C主要特點如下所示:
- 只需要兩條總線;
- 沒有嚴格的波特率要求,例如使用RS232,主設備生成總線時鐘;
- 所有組件之間都存在簡單的主/從關系,連接到總線的每個設備均可通過唯一地址進行軟體尋址;
- I2C是真正的多主設備總線,可提供仲裁和沖突檢測;
- 傳輸速度分為四種模式:
1、標準模式:Standard Mode=100 Kbps
2、快速模式:Fast Mode=400 Kbps
3、高速模式:High speed mode=3.4 Mbps
4、超快速模式:Ultra fast mode=5 Mbps
- 最大主設備數:無限制;
- 最大從機數:理論上是127,
1、硬體層
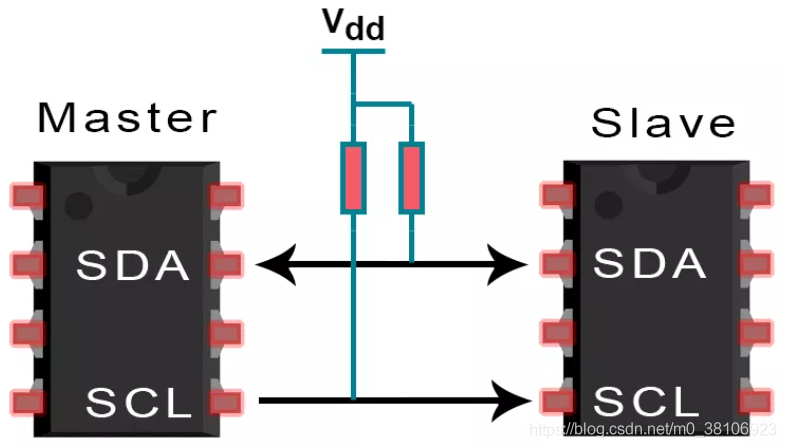
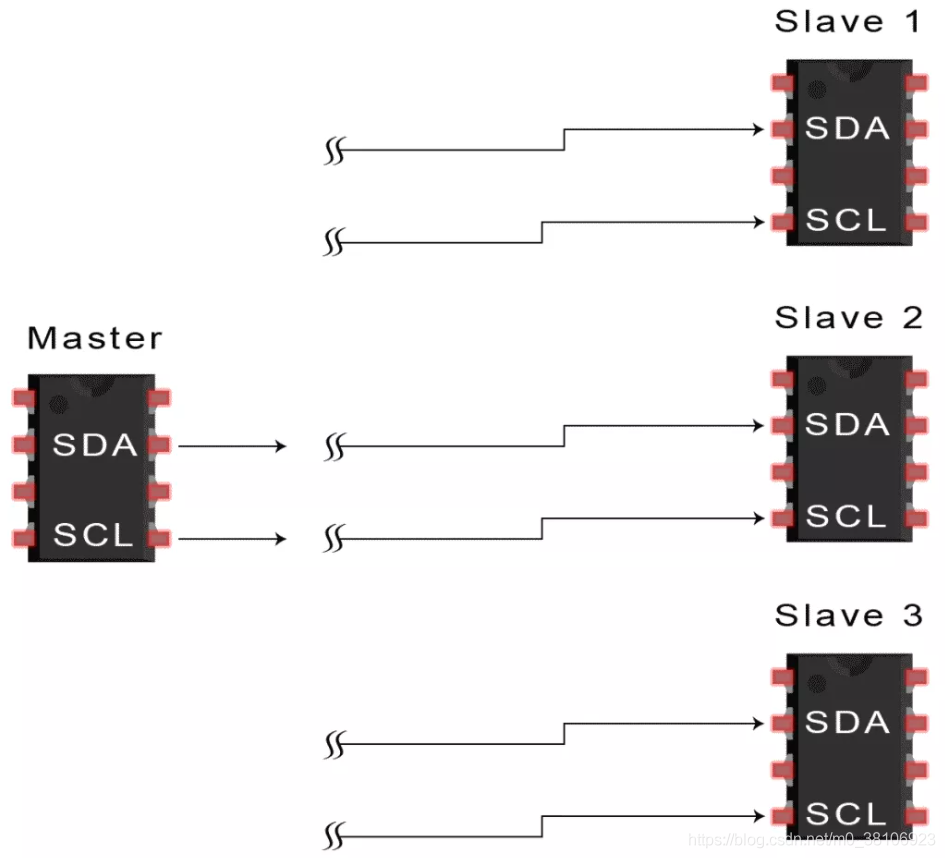
I2C協議僅需要SDA和SCL兩個引腳,SDA是串行資料線的縮寫,而SCL是串行時鐘線的縮寫,這兩條資料線需要接上拉電阻,設備間的連接如下圖所示:
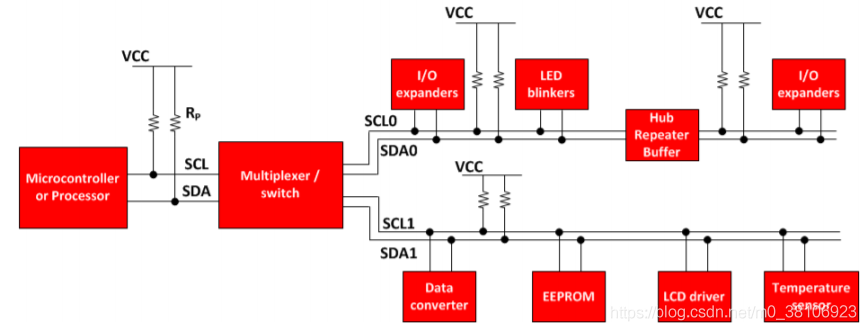
使用I2C,可以將多個從機(Slave)連接到單個主設備(Master)(一對多通信),并且還可以有多個主設備(Master)控制一個或多個從機(Slave)(多對多通信),
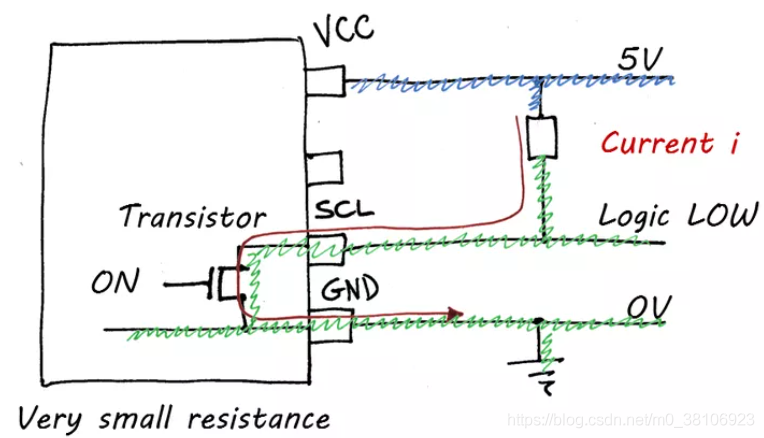
I2C總線(SDA,SCL)內部都使用漏極開路驅動器(開漏驅動),因此SDA和SCL可以被拉低為低電平,但是不能被驅動為高電平,所以每條線上都要使用一個上拉電阻,默認情況下將其保持在高電平;
上拉電阻的值取決于許多因素,德州儀器TI 建議使用以下公式來計算正確的上拉電阻值:
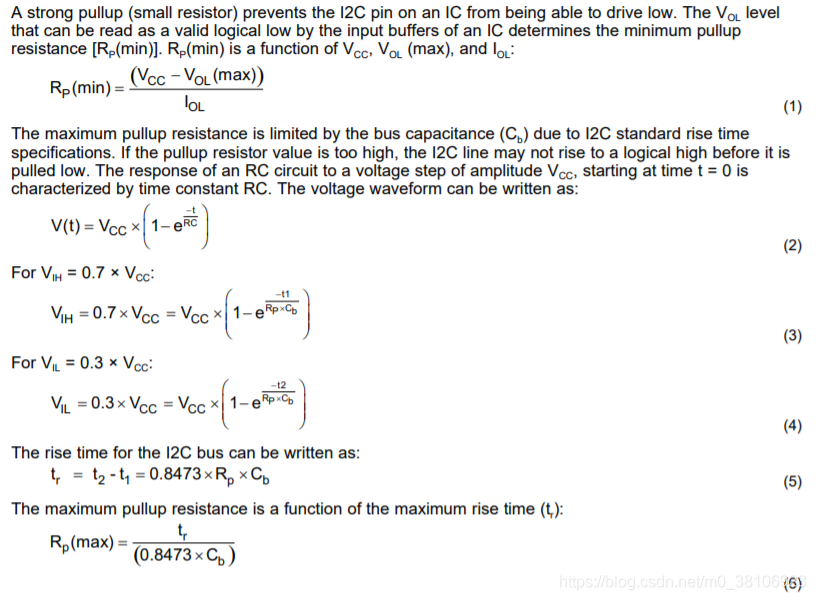
其中VLO是邏輯低電壓;
IOL是邏輯低電流;
TR是信號的最大上升時間;
CB是總線(電線)電容;
具體如下所示:
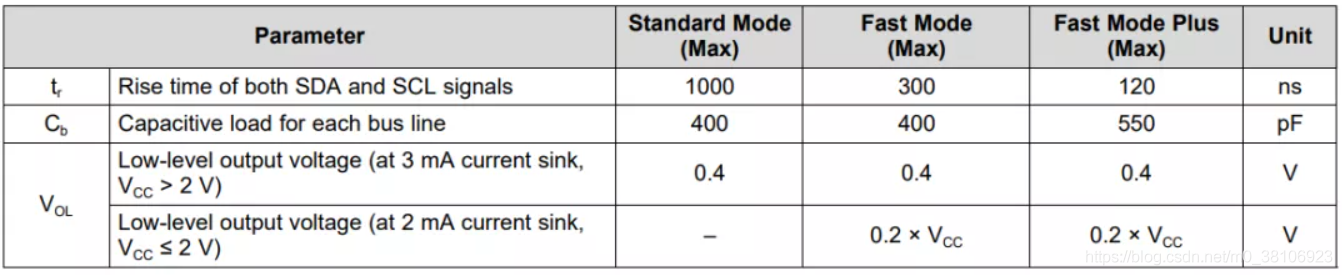
根據上表,這里不難發現需要在做電阻選擇需要滿足幾個條件;
- 灌電流最大值為3mA;
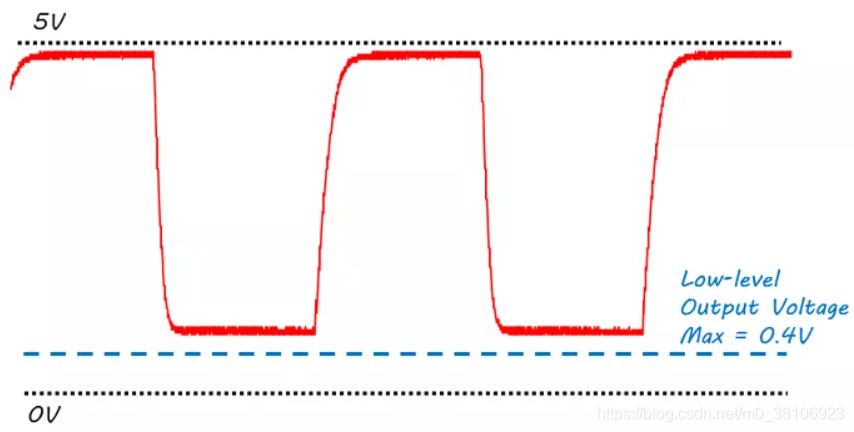
- 另外I2C總線規范和用戶手冊還為低電平輸出電壓設定了最大值為0.4V,
所以根據上述公式可以計算,對于5V的電源,每個上拉電阻阻值至少1.53kΩ,而對于3.3V的電源,每個電阻阻值至少967Ω,
如果覺得計算電阻值比較麻煩,也可以使用典型值 4.7kΩ,
上述推導程序可以參考 TI的檔案《I2C Bus Pullup Resistor Calculation》
https://www.ti.com/lit/an/slva689/slva689.pdf
最終在除錯的時候,當測量SDA或SCL信號并且邏輯LOW上的電壓高于0.4V時,我們就知道可以知道灌電流太高了;
當然,這并不意味著每當灌電流超過3mA時,設備就會立即停止作業,但是,在操作超出其規格的設備時,應始終小心,因為它可能導致通信故障,縮短其使用壽命甚至甚至永久損壞設備,
2、資料傳輸協議
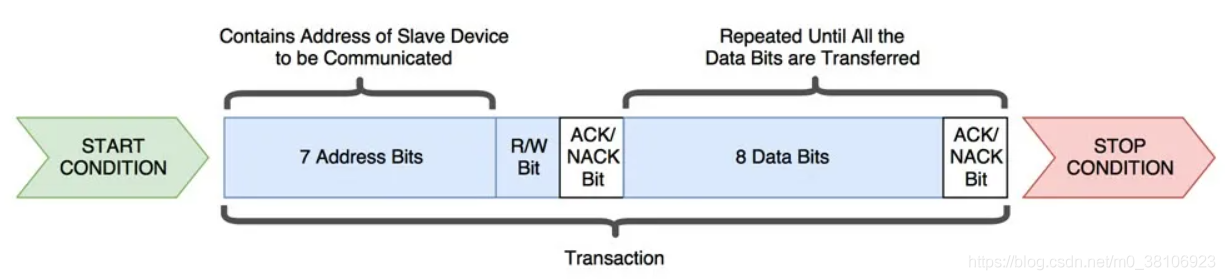
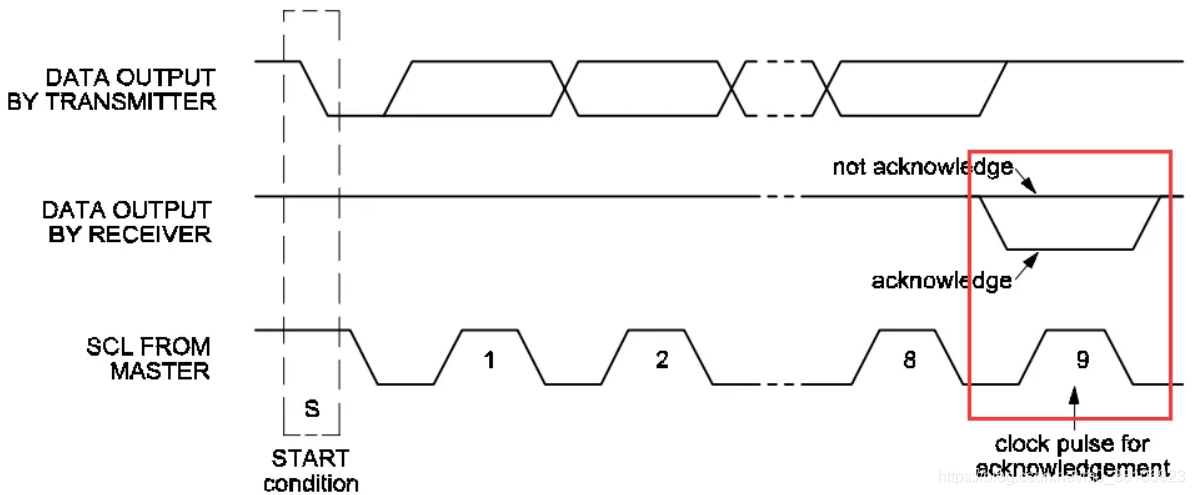
主設備和從設備進行資料傳輸時遵循以下協議格式,資料通過一條SDA資料線在主設備和從設備之間傳輸0和1的串行資料,串行資料序列的結構可以分為,開始條件,地址位,讀寫位,應答位,資料位,停止條件,具體如下圖所示:
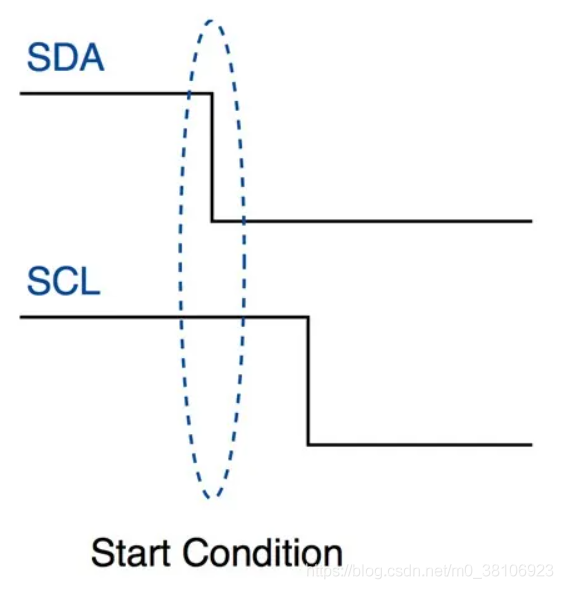
開始條件
當主設備決定開始通訊時,需要發送開始信號,需要執行以下動作:
- 先將SDA線從高壓電平切換到低壓電平;
- 然后將
SCL從高電平切換到低電平;
在主設備發送開始條件信號之后,所有從機即使處于睡眠模式也將變為活動狀態,并等待接收地址位,具體如下圖所示:
地址位
通常地址位占7位資料,主設備如果需要向從機發送/接收資料,首先要發送對應從機的地址,然后會匹配總線上掛載的從機的地址,
I2C還支持10位尋址;
讀寫位
該位指定資料傳輸的方向,
- 如果主設備需要將資料發送到從設備,則該位設定為
0; - 如果主設備需要往從設備接收資料,則將其設定為
1,
ACK/NACK
主機每次發送完資料之后會等待從設備的應答信號ACK,
- 在第9個時鐘信號,如果從設備發送應答信號
ACK,則SDA會被拉低; - 若沒有應答信號
NACK,則SDA會輸出為高電平,這程序會引起主設備發生重啟或者停止;
資料塊
傳輸的資料總共有8位,由發送方設定,它需要將資料位傳輸到接收方,
發送之后會緊跟一個ACK / NACK位,如果接收器成功接收到資料,則設定為0,否則,它保持邏輯“ 1”,
重復發送,直到資料完全傳輸為止,
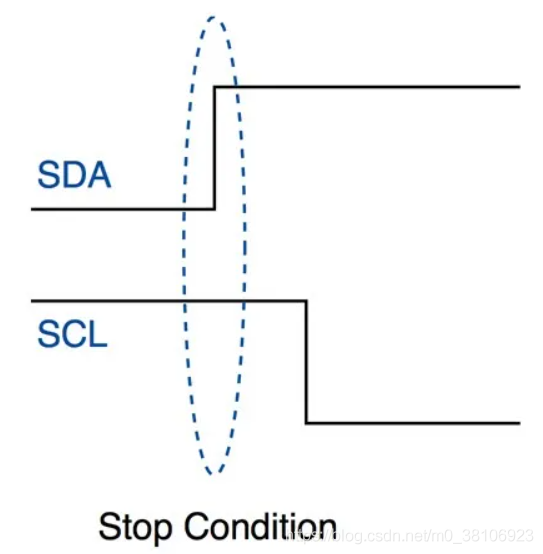
停止條件
當主設備決定結束通訊時,需要發送開始信號,需要執行以下動作;
- 先將SDA線從低電壓電平切換到高電壓電平;
- 再將SCL線從高電平拉到低電平,
具體如下圖所示:
3、作業程序
第1步:起始條件
主設備通過將SDA線從高電平切換到低電平,再將SCL線從高電平切換到低電平,來向每個連接的從機發送啟動條件,如下圖所示:
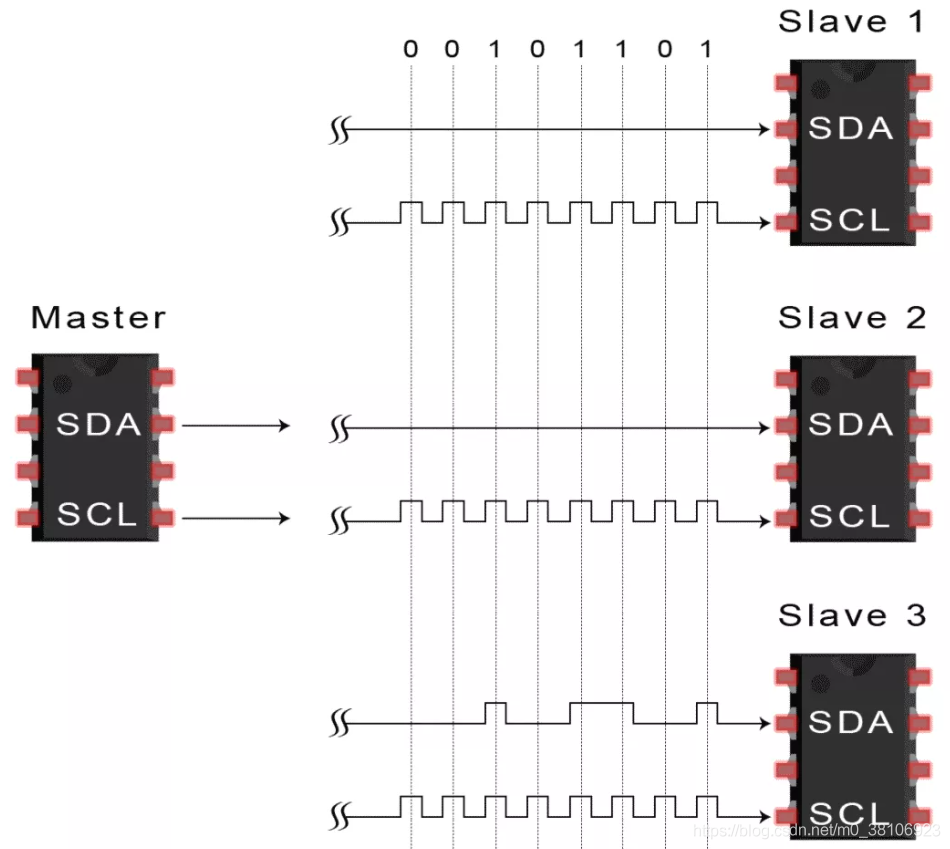
第2步:發送從設備地址
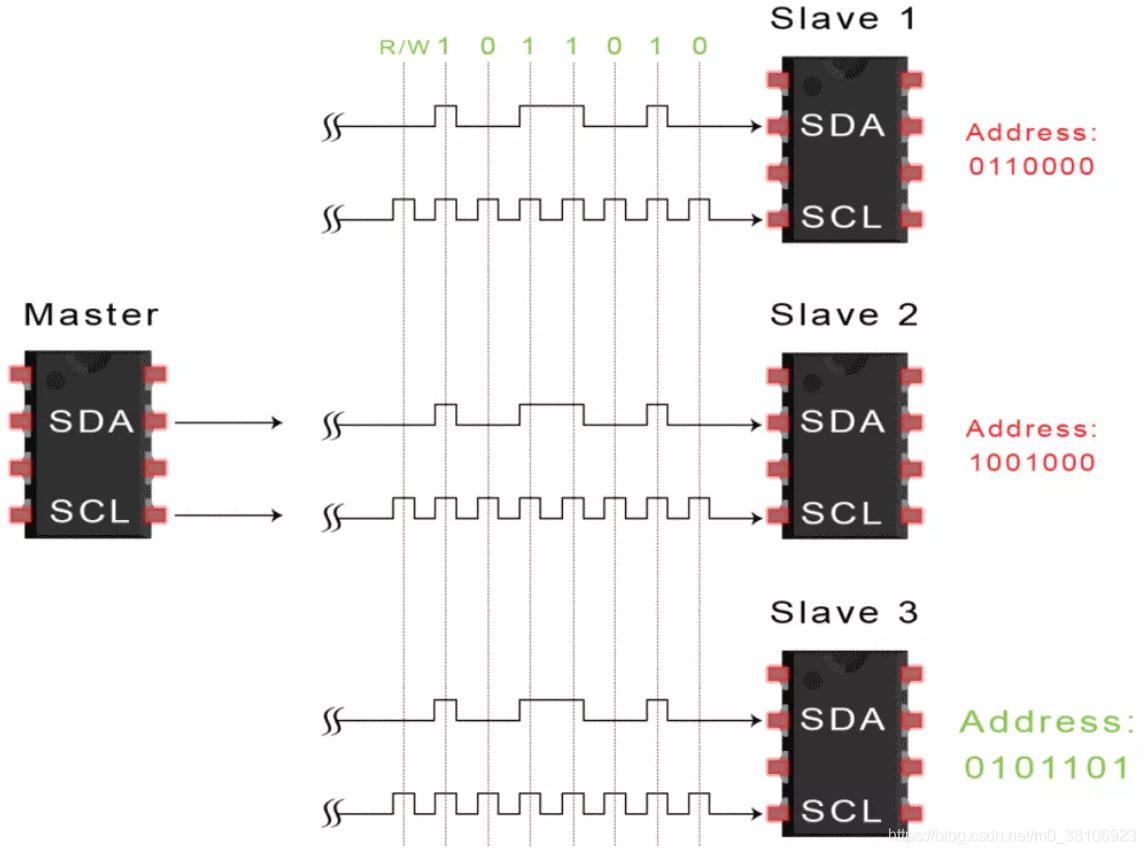
主設備向每個從機發送要與之通信的從機的7位或10位地址,以及相應的讀/寫位,如下圖所示:
第3步:接收應答
每個從設備將主設備發送的地址與其自己的地址進行比較,如果地址匹配,則從設備通過將SDA線拉低一位以表示回傳一個ACK位,
如果來自主設備的地址與從機自身的地址不匹配,則從設備將SDA線拉高,表示回傳一個NACK位,
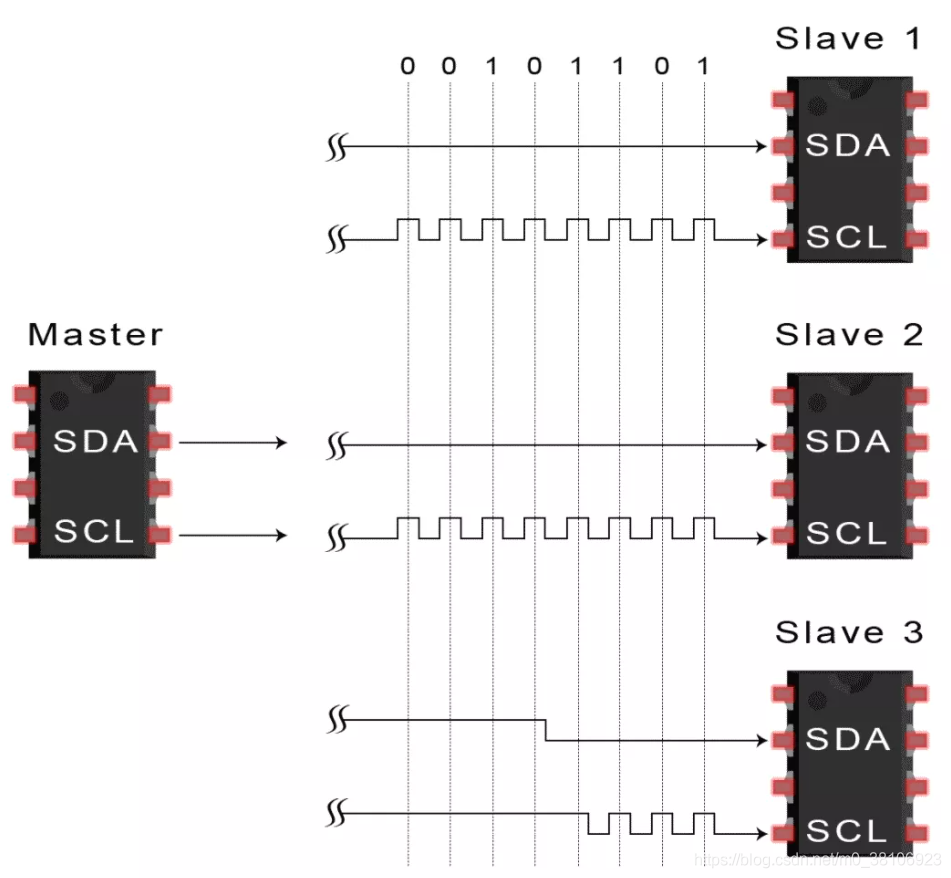
第4步:收發資料
主設備發送或接收資料到從設備,如下圖所示:
第5步:接收應答
在傳輸完每個資料幀后,接收設備將另一個ACK位回傳給發送方,以確認已成功接收到該幀,如下圖所示:
第6步:停止通信
為了停止資料傳輸,主設備將SCL切換為高電平,然后再將SDA切換為高電平,從而向從機發送停止條件,如下圖所示:
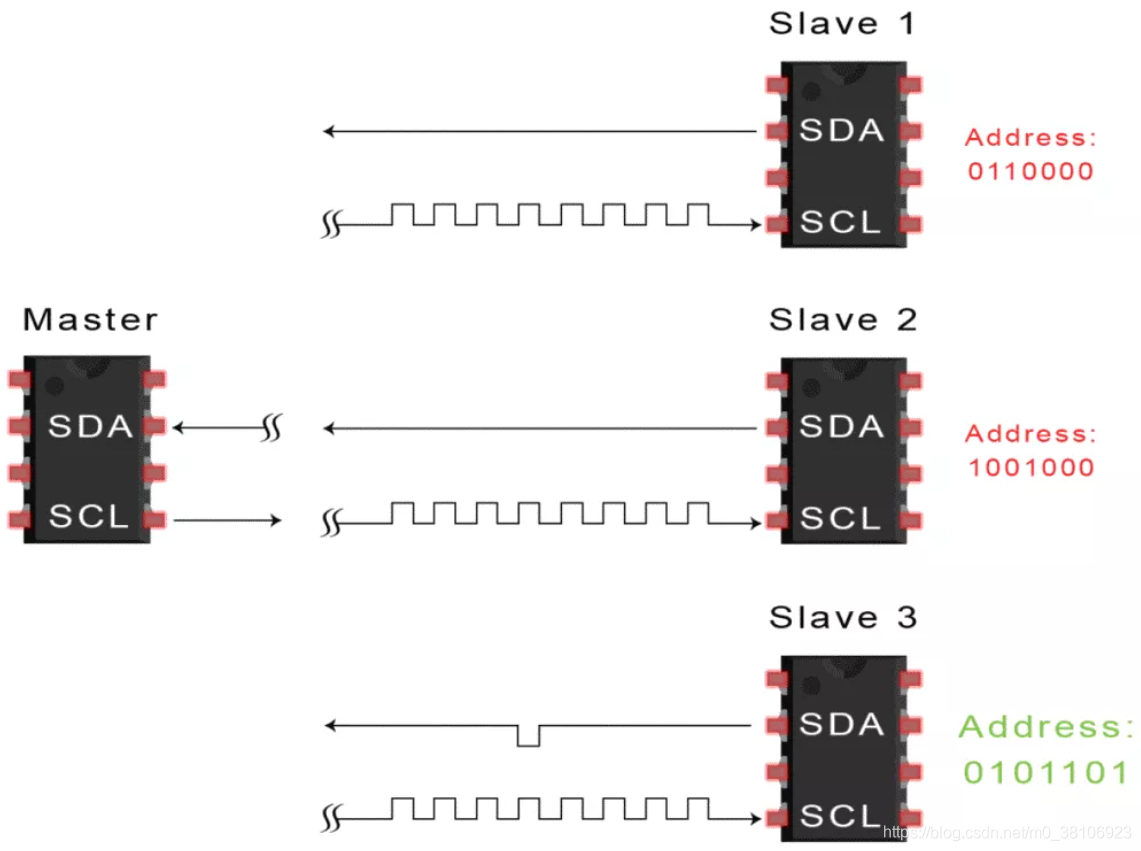
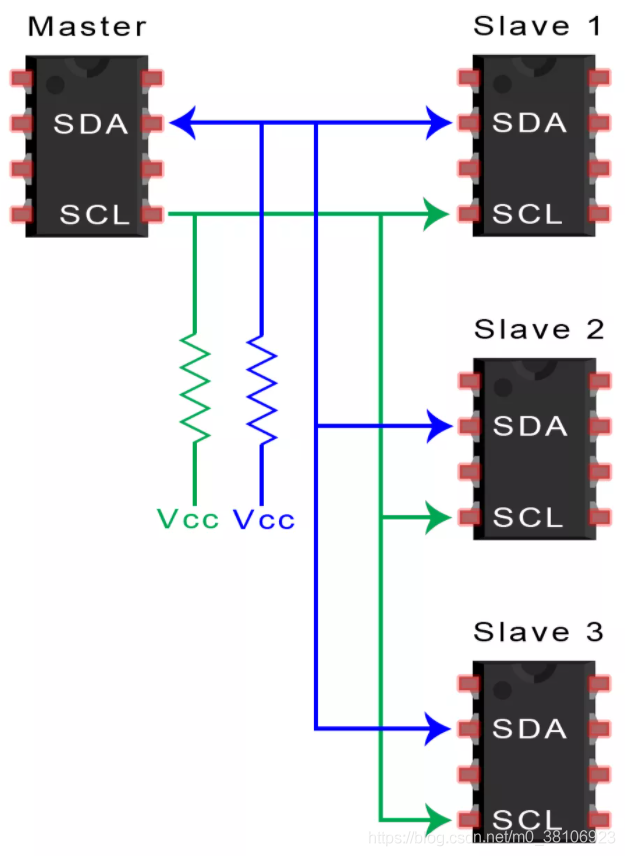
3.1、單個主設備連接多個從機
I2C總線上的主設備使用7位地址對從設備進行尋址,可以使用128(2的7次方)個從機地址,如下圖所示:
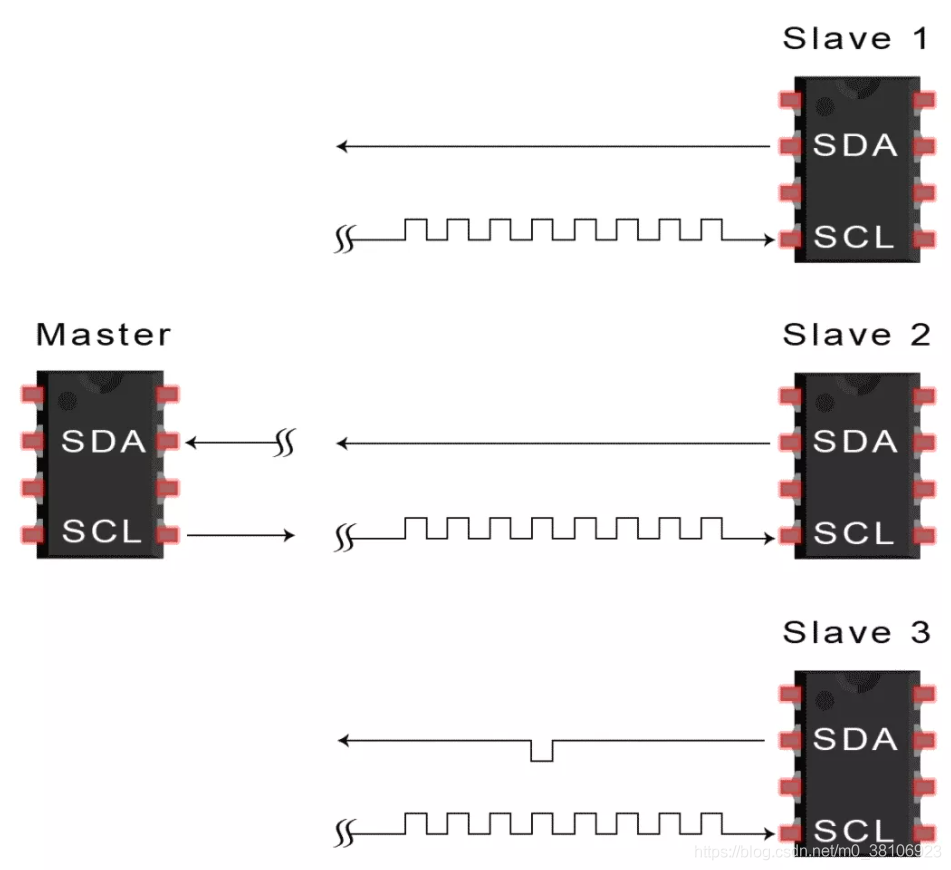
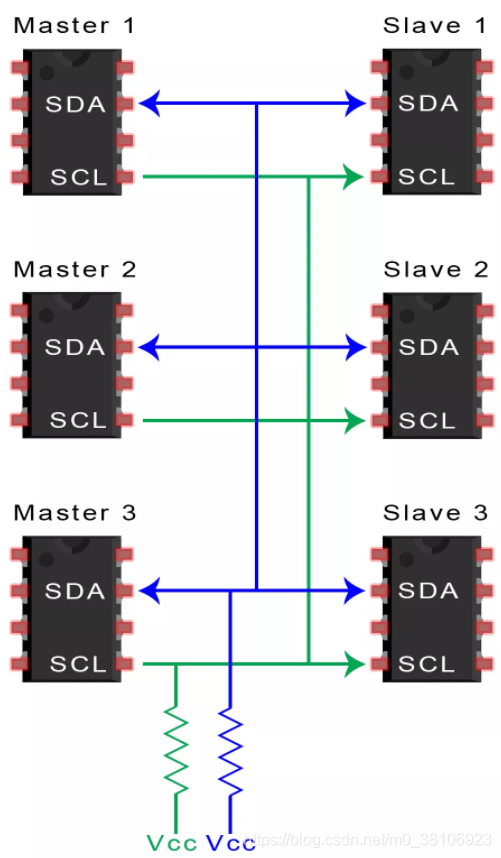
3.2、多個主設備連接多個從機
多個主設備可以連接到一個或多個從機;
當兩個主設備試圖通過SDA線路同時發送或接收資料時,同一系統中的多個主設備就會出現問題,
為了解決這個問題,每個主設備都需要在發送訊息之前檢測SDA線是低電平還是高電平;
- 如果SDA線為低電平,則意味著另一個主設備可以控制總線,并且主設備應等待發送訊息;
- 如果SDA線為高電平,則可以安全地發送訊息,
【I2C實戰】 DS18B20溫度傳感器的特性、原理、驅動(華大半導體HC32L136、ESP32驅動)
本文整理來源于:微信公眾號:小麥大叔,作者菜刀和小麥
 CSDN認證博客專家
視覺/OpenCV
IoT/嵌入式
Python
CSDN認證博客專家
視覺/OpenCV
IoT/嵌入式
Python
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/200552.html
標籤:其他
上一篇:RPLIDAR雷達學習記錄--2