基于藍橋杯物聯網的開發技術省賽教程
一、入門篇
1、 藍橋杯物聯網開發 入門篇① 認識LoRa終端
2、 藍橋杯物聯網開發 入門篇② 開發環境搭建
3、 藍橋杯物聯網開發 入門篇③ 利用CubeMX配置一個MDK工程
4、 藍橋杯物聯網開發 入門篇④ 燒錄程式
二、基礎篇
1、 藍橋杯物聯網開發 基礎篇① GPIO輸出
2、 藍橋杯物聯網開發 基礎篇② GPIO輸入
3、 藍橋杯物聯網開發 基礎篇③ 滴答定時器
4、 藍橋杯物聯網開發 基礎篇④ 時鐘選擇
5、藍橋杯物聯網開發 基礎篇⑤ 外部中斷
6、藍橋杯物聯網開發 基礎篇⑥ 串口發送
7、藍橋杯物聯網開發 基礎篇⑦ 串口接收
前言:
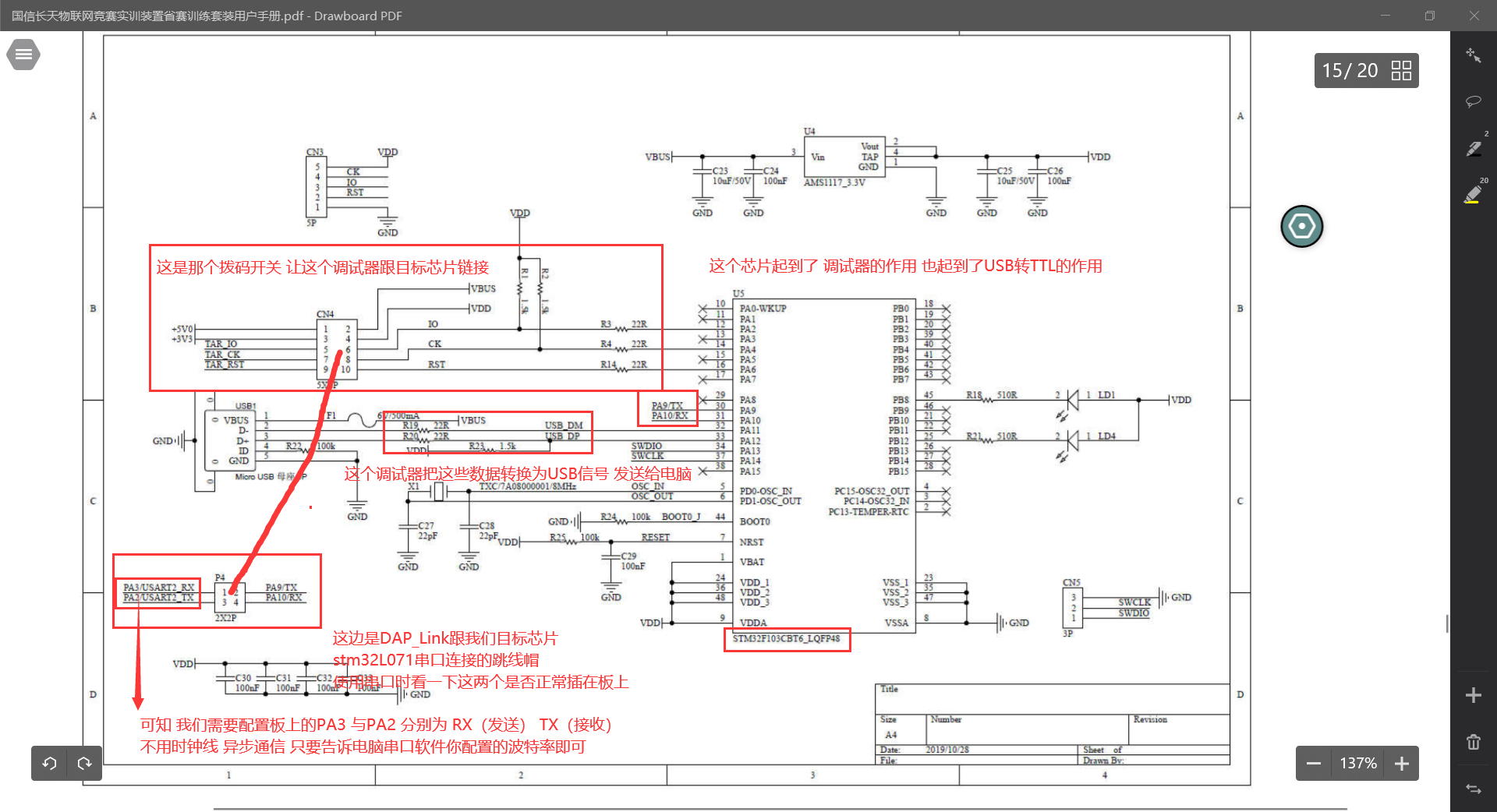
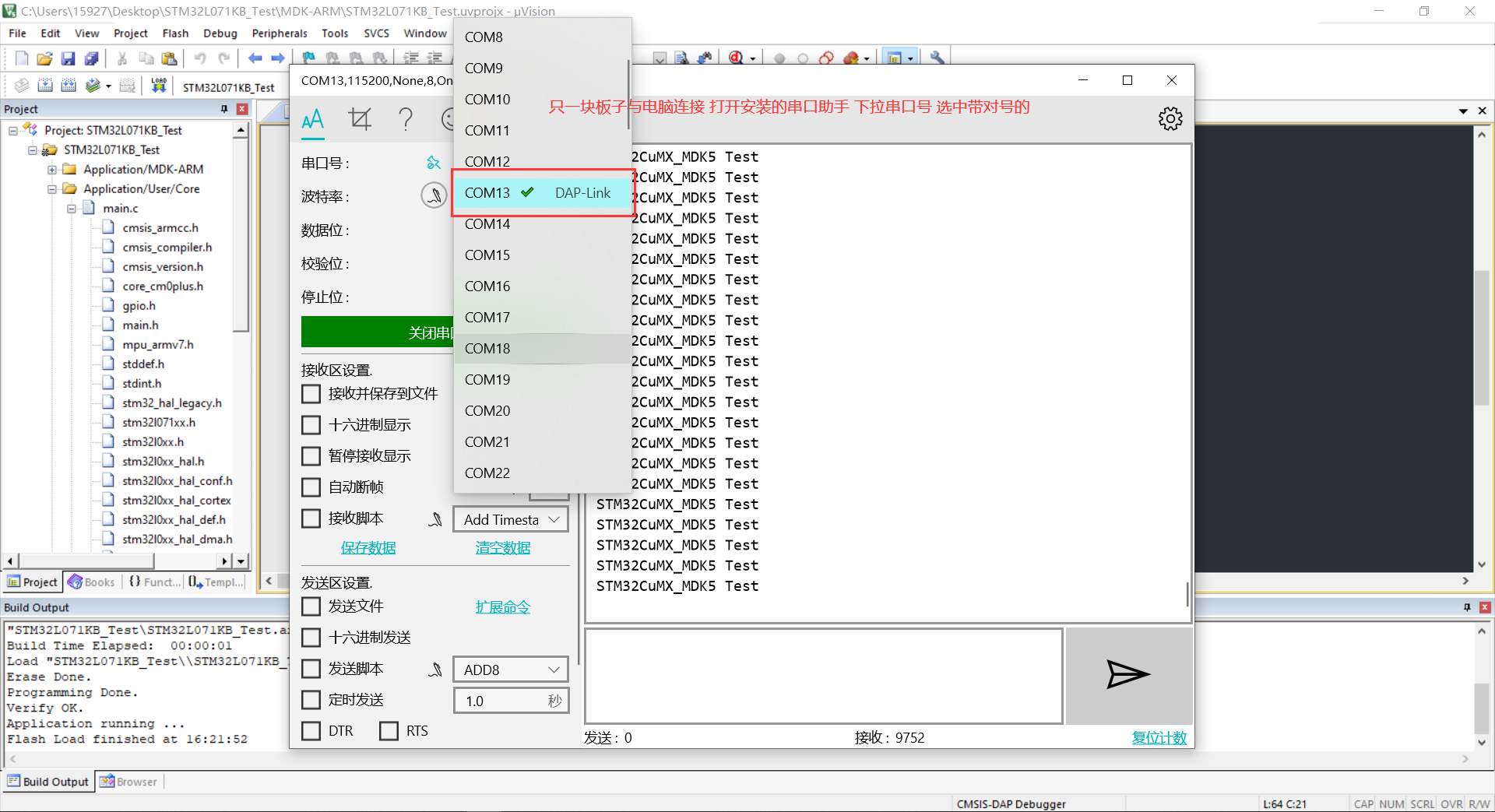
??這一章我們主要了解用戶手冊 以保證比賽程序中可以輕車熟路 條提高效率 本小節會講如何給LoRa終端主控芯片STM32L071KB將stm32芯片通過DAP_Link的虛擬串口TTL電平信號與電腦USB介面的232電平相互轉換實作通信(板載的stm32f103c8芯片實作了這個功能 方便了我們除錯)我們前期的一些除錯作業主要依靠串口 將單點機的運行狀態通過電腦視窗直觀表現
用戶手冊在這里
鏈接:https://pan.baidu.com/s/11-Dg2BHrhvzXbe7NAO6aOA
提取碼:9x5w
文章目錄
- 基于藍橋杯物聯網的開發技術省賽教程
- 前言:
- 1、板載串口簡介
- 串口通訊
- 硬體配置
- 2、STM32CubeMX配置
- 3、MDK5主要代碼講解
- 4、實驗現象
1、板載串口簡介
??
串口通訊
(Serial Communication)是一種設備間非常常用的串行通訊方式,因為它簡單便捷,因此大部分電子設備都支持該通訊方式,其通訊協議可分層為協議層和物理層,物理層規定通信協議中具有機械、電子功能的特性,從而確保原始資料在物理媒體的傳播;協議層主要規定通訊邏輯,統一雙方的資料打包、解包標準,一般只使用 RXD、TXD 以及 GND 三條信號線,直接傳輸資料信號,通過調整Boot0引腳的高低電平還可以實作為stm32燒錄程式,由于該教程僅做入門實驗使用 不要求資料穩定性 不會涉及較復雜的中斷以及CRC來防止輸出丟包和資料出錯(小概率事件)詳細了解暫存器的話可以參看其他博主
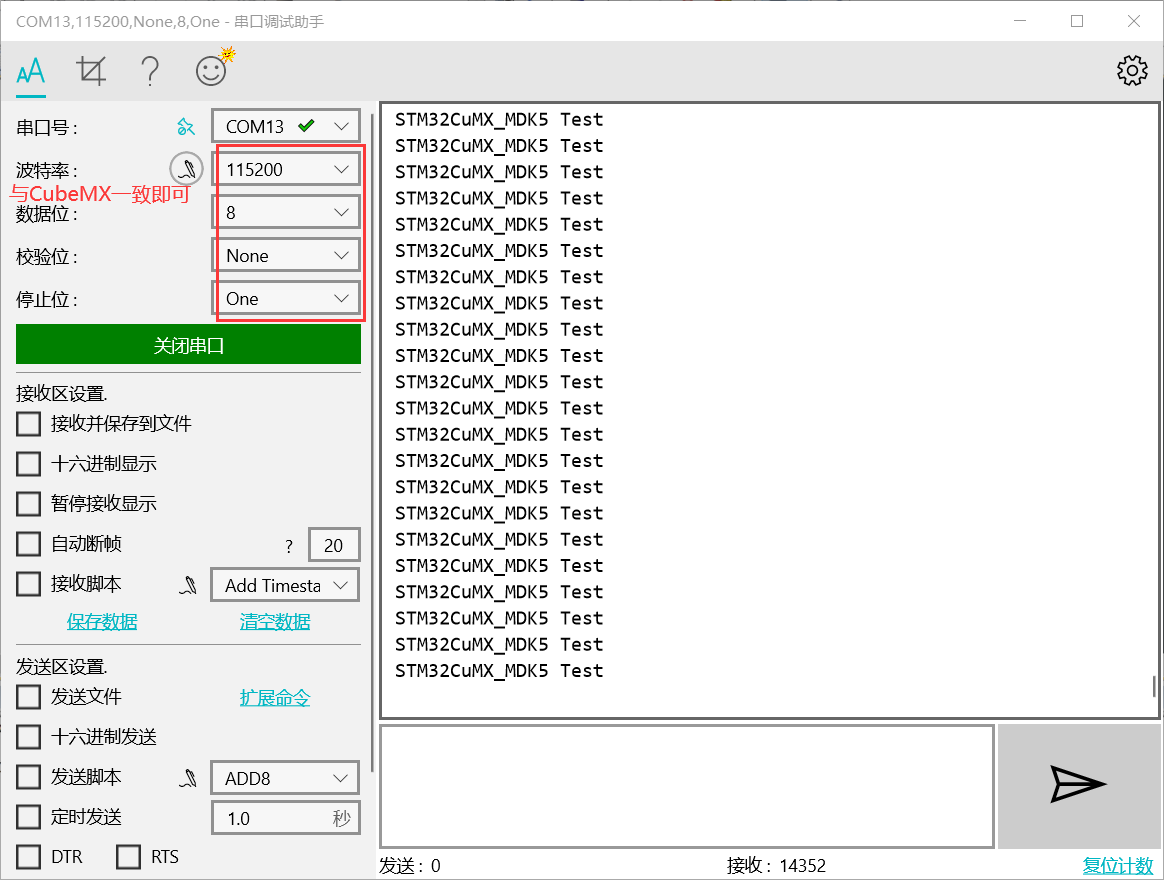
波特率:發送二進制資料位的速率,習慣上用 baud 表示,即我們發送一位二進制資料的持續時間=1/baud,(不需要深究)
stm32串口詳解這位博主介紹的比較簡明
硬體配置
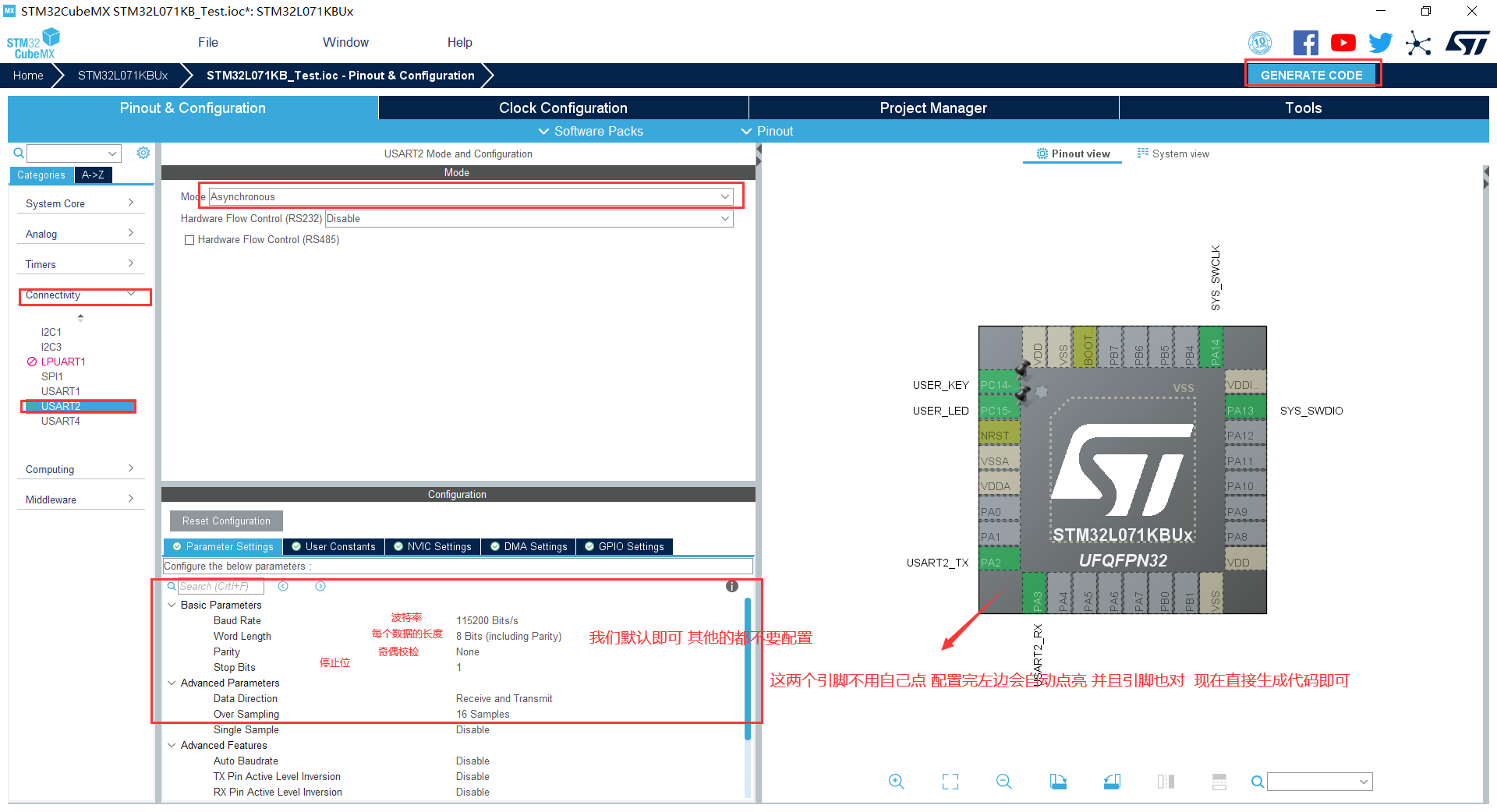
2、STM32CubeMX配置
本小節繼續使用之前生成的工程即可
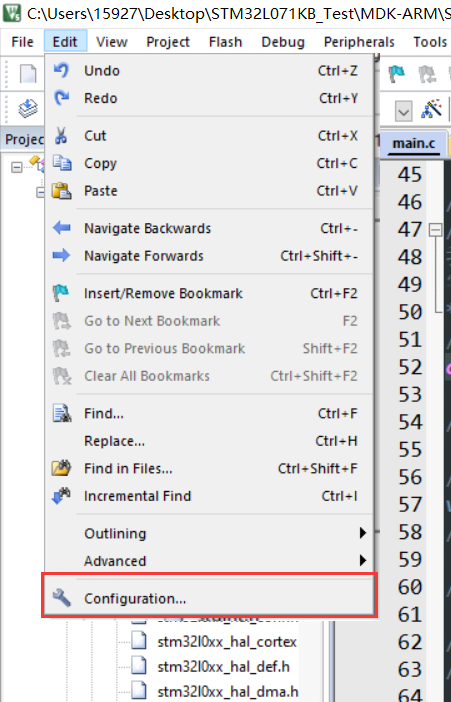
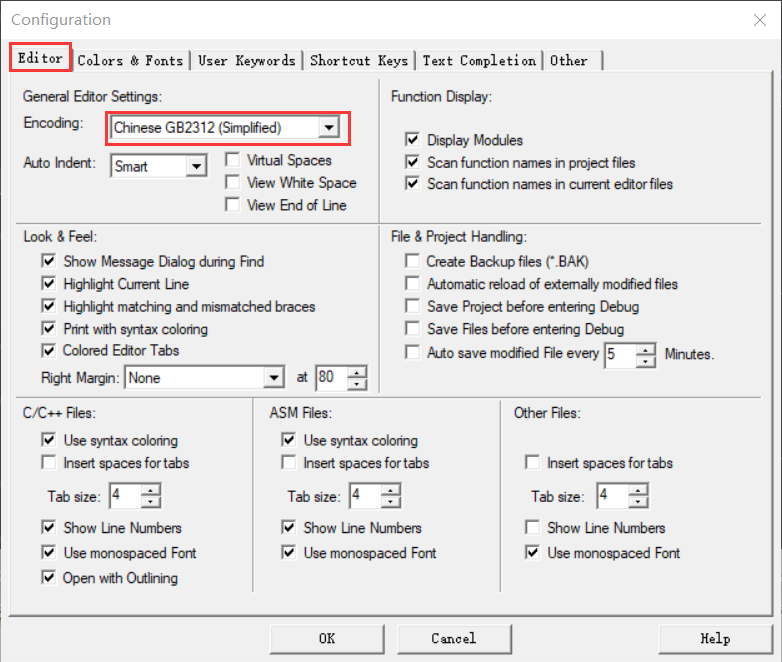
3、MDK5主要代碼講解
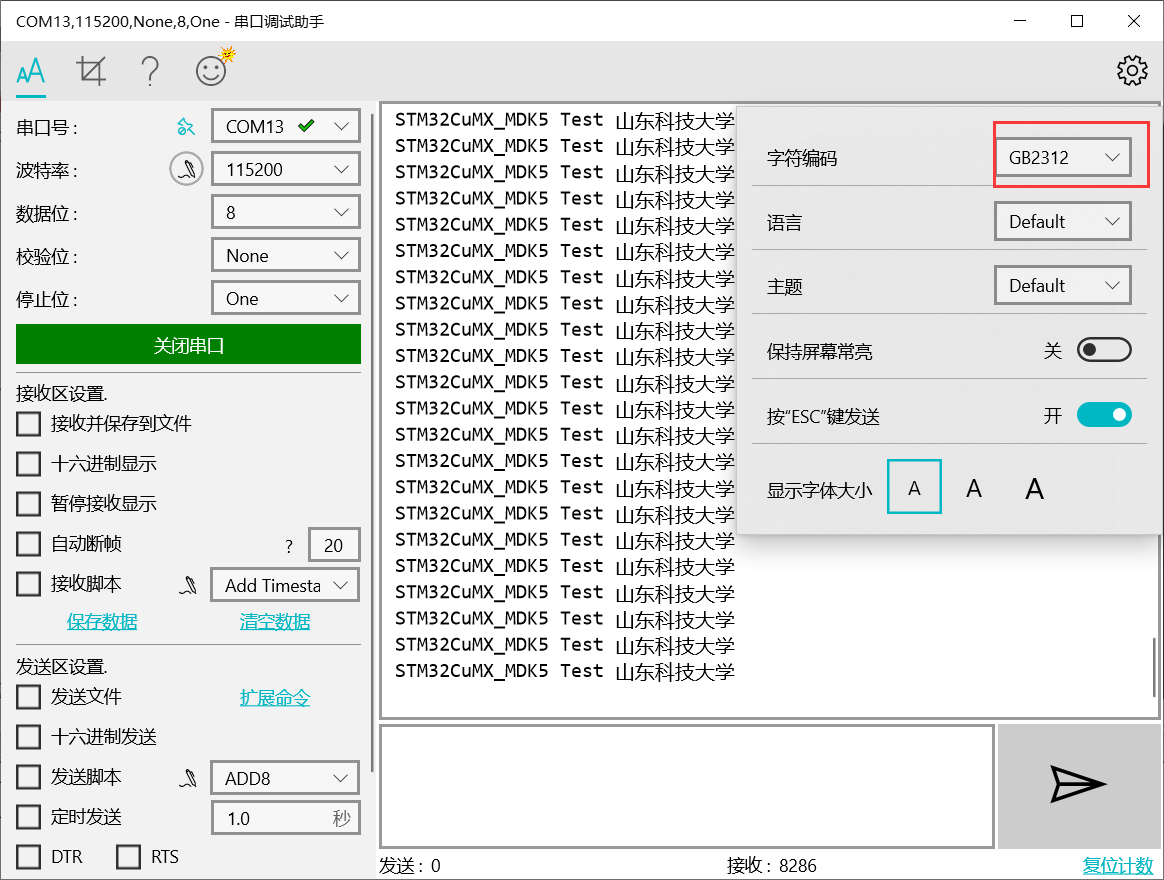
為了使編譯后的代碼發送給電腦不會亂碼 MDK5根串口除錯軟體需要統一編碼格式 這里統一用GB2312
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2021 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/*
我們定義一個要發送的字串或者陣列 注釋上句 打開下一句即可 為了便于除錯 定義為陣列即可
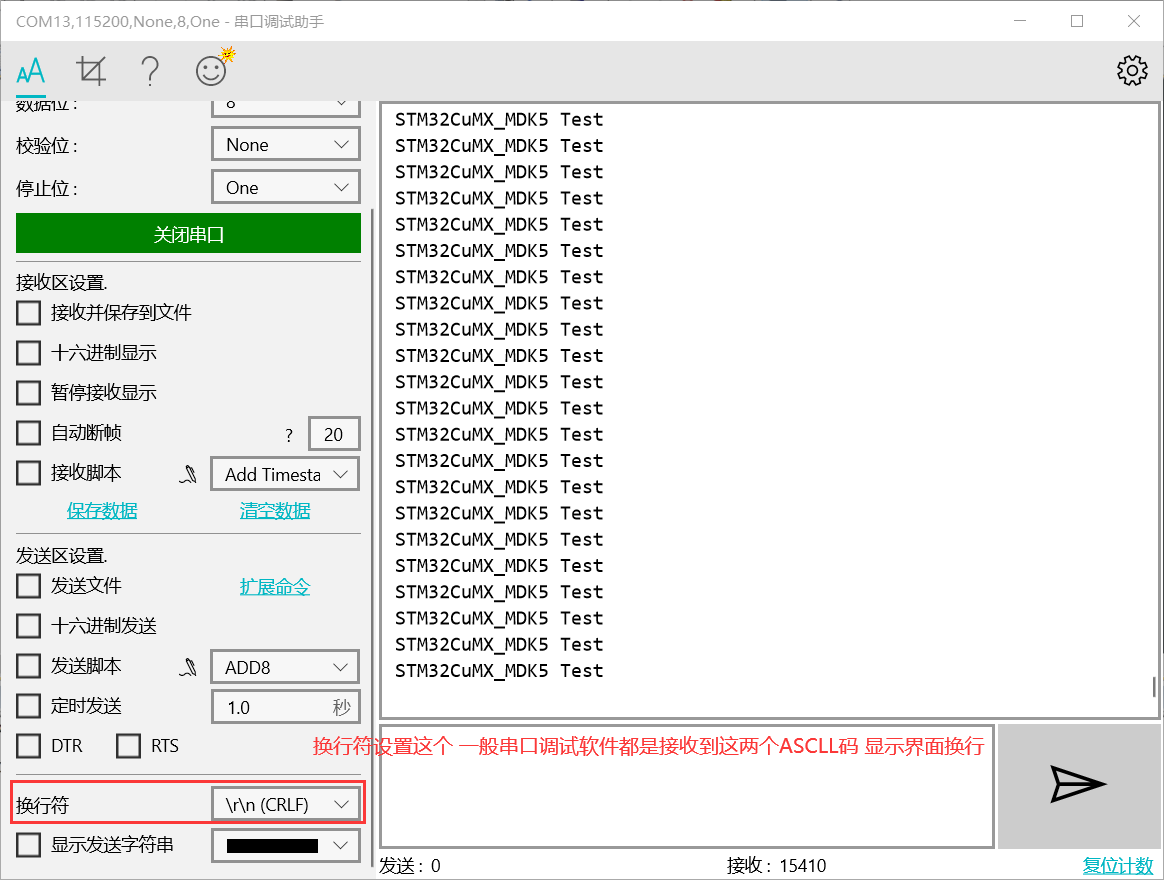
字串結尾加上兩個ASCII碼 \r\n 注意是從左斜杠 來作為顯示換行符號 便于也讀除錯資訊
*/
//char * Send_Data = "STM32CuMX_MDK5 Test \r\n";
char Send_Data[] = "STM32CuMX_MDK5 Test 山東科技大學 \r\n";
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/*
發送我們主要使用這個函式 不知道引數怎么填寫 我們就F12跳轉到函式定義 然后再跳轉到引數定義
里面一般會有各個引數可以填寫的值
這個函式第一個引數是你配置的哪個串口句柄 "usart.h"檔案里面會有
第二個引數是你定義的陣列字串
第三個是要發送的資料量 8個bit 一個char型為一個資料
第四個是要發送超時時間 如果超過了超時時間還是沒能把資料全部轉移到發送暫存器就會自動退出 發送也會中斷 這個配置的大一點就可以
*/
HAL_UART_Transmit(&huart2, (uint8_t *)Send_Data, sizeof(Send_Data), 0XFFFFFFFF);
HAL_Delay(1000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLLMUL_4;
RCC_OscInitStruct.PLL.PLLDIV = RCC_PLLDIV_2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_1) != HAL_OK)
{
Error_Handler();
}
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_USART2;
PeriphClkInit.Usart2ClockSelection = RCC_USART2CLKSOURCE_PCLK1;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
4、實驗現象
配置沒有問題 點擊打開串口 會每一秒接收我們寫的字串 也可以是漢字 自己定義字串即可
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/263345.html
標籤:其他