@Author:Runsen
上次講了yolov3,這是使用yolov3的模型通過opencv的攝像頭來執行YOLOv3 物件檢測,
匯入所需模塊:
import cv2
import numpy as np
import time
讓我們定義一些我們需要的變數和引數:
CONFIDENCE = 0.5
SCORE_THRESHOLD = 0.5
IOU_THRESHOLD = 0.5
# network configuration
config_path = "cfg/yolov3.cfg"
# YOLO net weights
weights_path = "weights/yolov3.weights"
# coco class labels (objects)
labels = open("data/coco.names").read().strip().split("\n")
# 每一個物件的檢測框的顏色
colors = np.random.randint(0, 255, size=(len(LABELS), 3), dtype="uint8")
config_path和weights_path 分別代表yolov3模型配置 和對應的預訓練模型權重,
- yolov3.cfg下載:https://github.com/pjreddie/darknet/blob/master/cfg/yolov3.cfg
- coco.names下載:https://github.com/pjreddie/darknet/blob/master/data/coco.names
- yolov3.weights下載:https://pjreddie.com/media/files/yolov3.weights
labels是檢測的不同物件的所有類標簽的串列,生成隨機顏色
是因為有很多類的存在,
下面的代碼加載模型:
net = cv2.dnn.readNetFromDarknet(config_path, weights_path)
先加載一個示例影像:

path_name = "test.jpg"
image = cv2.imread(path_name)
file_name = os.path.basename(path_name)
filename, ext = file_name.split(".")
h, w = image.shape[:2]
接下來,需要對這個影像進行歸一化、縮放和整形,使其適合作為神經網路的輸入:
# create 4D blob
blob = cv2.dnn.blobFromImage(image, 1/255.0, (416, 416), swapRB=True, crop=False)
這會將像素值標準化為從0到1 的范圍,將影像大小調整為(416, 416)并對其進行縮放
print("image.shape:", image.shape)
print("blob.shape:", blob.shape)
image.shape: (1200, 1800, 3)
blob.shape: (1, 3, 416, 416)
現在讓我們將此影像輸入神經網路以獲得輸出預測:
# 將blob設定為網路的輸入
net.setInput(blob)
# 獲取所有圖層名稱
ln = net.getLayerNames()
ln = [ln[i[0] - 1] for i in net.getUnconnectedOutLayers()]
#得到網路輸出
#測量一下時間花費
start = time.perf_counter()
layer_outputs = net.forward(ln)
time_took = time.perf_counter() - start
print(f"Time took: {time_took:.2f}s")
boxes, confidences, class_ids = [], [], []
# 在每個層輸出上回圈
for output in layer_outputs:
# 在每一個物體上回圈
'''
detection.shape等于85,前4 個值代表物體的位置,(x, y)坐標為中心點和邊界框的寬度和高度,其余數字對應物體標簽,因為這是COCO 資料集,它有80類標簽,
例如,如果檢測到的物件是人,則80長度向量中的第一個值應為1,其余所有值應為0,自行車的第二個數字,汽車的第三個數字,一直到第 80 個物件,然后使用np.argmax()
函式來獲取類 id 的原因,因為它回傳80長度向量中最大值的索引,
'''
for detection in output:
# 提取類id(標簽)和置信度(作為概率)
# 當前目標檢測
scores = detection[5:]
class_id = np.argmax(scores)
confidence = scores[class_id]
if confidence > CONFIDENCE:
# 將邊界框坐標相對于
# 影像的大小,記住YOLO實際上
# 回傳邊界的中心(x,y)坐標
# 框,然后是框的寬度和高度
box = detection[:4] * np.array([w, h, w, h])
(centerX, centerY, width, height) = box.astype("int")
# 使用中心(x,y)坐標匯出x和y
# 和邊界框的左角
x = int(centerX - (width / 2))
y = int(centerY - (height / 2))
# 更新邊界框坐標,信任度,和類ID
boxes.append([x, y, int(width), int(height)])
confidences.append(float(confidence))
class_ids.append(class_id)
#根據前面定義的分數執行非最大值抑制
idxs = cv2.dnn.NMSBoxes(boxes, confidences, SCORE_THRESHOLD, IOU_THRESHOLD)
font_scale = 1
thickness = 1
# 確保至少存在一個檢測
if len(idxs) > 0:
# 回圈查看我們保存的索引
for i in idxs.flatten():
# 提取邊界框坐標
x, y = boxes[i][0], boxes[i][1]
w, h = boxes[i][2], boxes[i][3]
# 在影像上繪制邊框矩形和標簽
color = [int(c) for c in colors[class_ids[i]]]
cv2.rectangle(image, (x, y), (x + w, y + h), color=color, thickness=thickness)
text = f"{labels[class_ids[i]]}: {confidences[i]:.2f}"
# 計算文本寬度和高度以繪制透明框作為文本背景
(text_width, text_height) = cv2.getTextSize(text, cv2.FONT_HERSHEY_SIMPLEX, fontScale=font_scale, thickness=thickness)[0]
text_offset_x = x
text_offset_y = y - 5
box_coords = ((text_offset_x, text_offset_y), (text_offset_x + text_width + 2, text_offset_y - text_height))
overlay = image.copy()
cv2.rectangle(overlay, box_coords[0], box_coords[1], color=color, thickness=cv2.FILLED)
#添加(長方體的透明度)
image = cv2.addWeighted(overlay, 0.6, image, 0.4, 0)
cv2.putText(image, text, (x, y - 5), cv2.FONT_HERSHEY_SIMPLEX,
fontScale=font_scale, color=(0, 0, 0), thickness=thickness)
cv2.imwrite(filename + "_yolo3." + ext, image)

一張圖片的時間需要1.3秒,
Time took: 1.32s
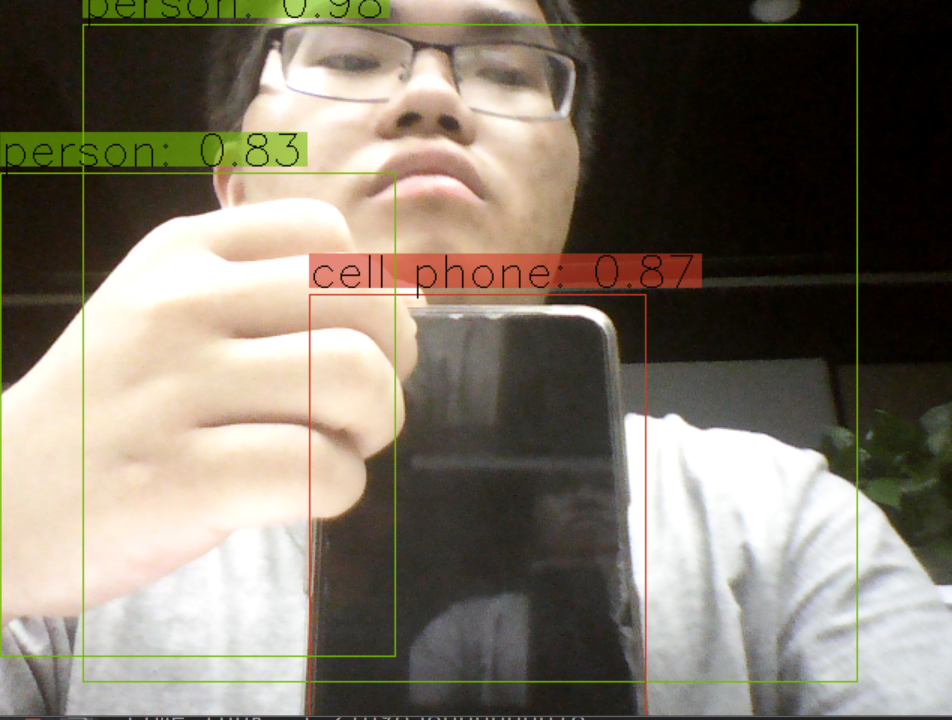
下面結合opencv讀取攝像頭的功能,實作攝像頭的拍攝畫面的識別
import cv2
import numpy as np
import time
CONFIDENCE = 0.5
SCORE_THRESHOLD = 0.5
IOU_THRESHOLD = 0.5
config_path = "cfg/yolov3.cfg"
weights_path = "weights/yolov3.weights"
font_scale = 1
thickness = 1
LABELS = open("data/coco.names").read().strip().split("\n")
COLORS = np.random.randint(0, 255, size=(len(LABELS), 3), dtype="uint8")
net = cv2.dnn.readNetFromDarknet(config_path, weights_path)
ln = net.getLayerNames()
ln = [ln[i[0] - 1] for i in net.getUnconnectedOutLayers()]
cap = cv2.VideoCapture(0)
while True:
_, image = cap.read()
h, w = image.shape[:2]
blob = cv2.dnn.blobFromImage(image, 1/255.0, (416, 416), swapRB=True, crop=False)
net.setInput(blob)
start = time.perf_counter()
layer_outputs = net.forward(ln)
time_took = time.perf_counter() - start
print("Time took:", time_took)
boxes, confidences, class_ids = [], [], []
for output in layer_outputs:
for detection in output:
scores = detection[5:]
class_id = np.argmax(scores)
confidence = scores[class_id]
if confidence > CONFIDENCE:
box = detection[:4] * np.array([w, h, w, h])
(centerX, centerY, width, height) = box.astype("int")
x = int(centerX - (width / 2))
y = int(centerY - (height / 2))
boxes.append([x, y, int(width), int(height)])
confidences.append(float(confidence))
class_ids.append(class_id)
idxs = cv2.dnn.NMSBoxes(boxes, confidences, SCORE_THRESHOLD, IOU_THRESHOLD)
font_scale = 1
thickness = 1
if len(idxs) > 0:
for i in idxs.flatten():
x, y = boxes[i][0], boxes[i][1]
w, h = boxes[i][2], boxes[i][3]
color = [int(c) for c in COLORS[class_ids[i]]]
cv2.rectangle(image, (x, y), (x + w, y + h), color=color, thickness=thickness)
text = f"{LABELS[class_ids[i]]}: {confidences[i]:.2f}"
(text_width, text_height) = cv2.getTextSize(text, cv2.FONT_HERSHEY_SIMPLEX, fontScale=font_scale, thickness=thickness)[0]
text_offset_x = x
text_offset_y = y - 5
box_coords = ((text_offset_x, text_offset_y), (text_offset_x + text_width + 2, text_offset_y - text_height))
overlay = image.copy()
cv2.rectangle(overlay, box_coords[0], box_coords[1], color=color, thickness=cv2.FILLED)
image = cv2.addWeighted(overlay, 0.6, image, 0.4, 0)
cv2.putText(image, text, (x, y - 5), cv2.FONT_HERSHEY_SIMPLEX,
fontScale=font_scale, color=(0, 0, 0), thickness=thickness)
cv2.imshow("image", image)
if ord("q") == cv2.waitKey(1):
break
cap.release()
cv2.destroyAllWindows()
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/290375.html
標籤:其他