OpenCV中的SURF(加速健壯功能)
- 1. 效果圖
- 2. 原理
- 2.1 為什么SURF比SIFT快?
- 2.3 怎樣獲取SIFT與SURF?
- 3. 原始碼
- 參考
上一篇博客介紹了用于關鍵點檢測和描述的SIFT,但它相對較慢,這篇博客將介紹其優化版本——SURF(Speeded-Up Robust Features 加速魯棒特征),它是加速版的SIFT;
- 在SIFT中,Lowe用高斯差分近似高斯的拉普拉斯算子來尋找尺度空間,
- SURF借助于積分影像,可以很容易地計算帶盒濾波器的卷積,并行計算不同的尺度,此外,SURF還依賴于規模和位置的Hessian矩陣行列式,
- SURF增加了許多功能以提高每一步的速度,它比SIFT快3倍,而性能與SIFT相當,
- SURF擅長處理模糊和旋轉的影像,但不擅長處理視點變化和照明變化,
1. 效果圖
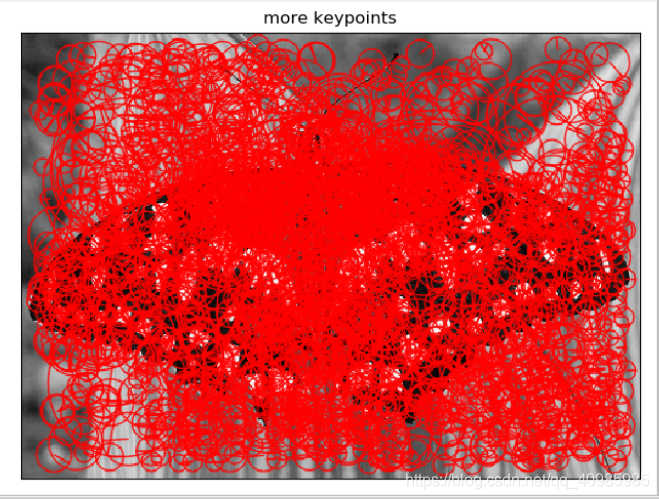
SURF默認引數效果圖如下:
檢查到的關鍵點比較多,把原圖覆寫完了,
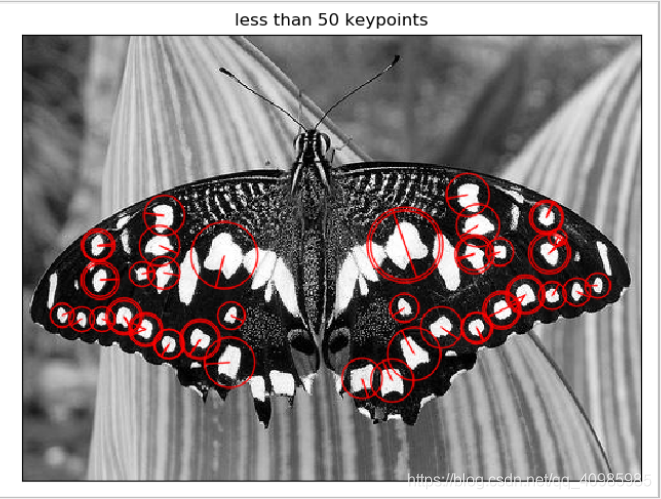
SURF調整閾值,檢查到關鍵點近50個,效果圖如下:
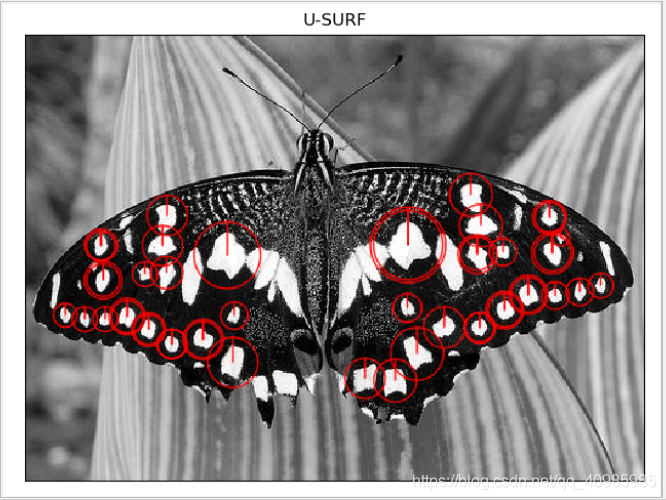
使用U-SURF不計算方向,方向全為一個,SURF關鍵點效果圖如下:
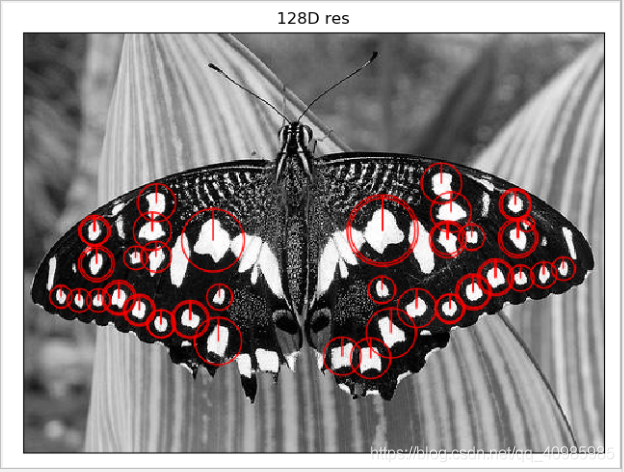
默認以64D計算效果圖如上,調整為128D,U-SURF效果圖如下:基本沒差別
2. 原理
OpenCV使用 SURF.detect()、SURF.compute()等來查找關鍵點和描述符,
2.1 為什么SURF比SIFT快?
- 在任何尺度下,利用積分影像都可以很容易地發現小波回應,
- 不考慮旋轉不變形,因此不需要找到方向會加快程序,
- SURF提供了一種稱為Upright-SURF或U-SURF的功能,它提高了速度,±15°之間非常健壯,
- OpenCV支持Upright-SURF、U-SURF,具體取決于標志,如果為0,則計算方向,如果為1,則不計算方向,速度更快,
- 維數越低,計算和匹配的速度越快,但特征的顯著性越好,OpenCV通過分別為64 dim和128 dim設定擴展為0和1的標志值(默認值為128 dim)來支持這兩種功能
- 另一個重要的改進是對潛在興趣點使用拉普拉斯符號(Hessian矩陣的軌跡),它不增加計算成本,拉普拉斯符號將黑暗背景上的明亮斑點與相反情況區分開來,
- 在匹配階段,只比較具有相同對比度的特征(如下圖所示),這種最小的資訊允許更快的匹配,而不會降低描述符的性能,
2.3 怎樣獲取SIFT與SURF?
-
https://stackoverflow.com/questions/64525121/sift-surf-set-opencv-enable-nonfree-cmake-solution-opencv-3-opencv-4
-
https://www.pianshen.com/article/8283162836/
SIFT、SURF是有專利的演算法,在OpenCV3.0以上時已去除,移到了opencv-contrib-python版本中,所以有以下方法可以獲取:
1)安裝opencv3以下版本
2)卸載opencv3以上版本,opencv-contrib-python安裝指定版本
3)安裝opencv3以上版本,安裝opencv-contrib-python,原始碼編譯安裝opencv;
綜上方法2更方便可行,只需要倆步:
- 卸載opencv-python
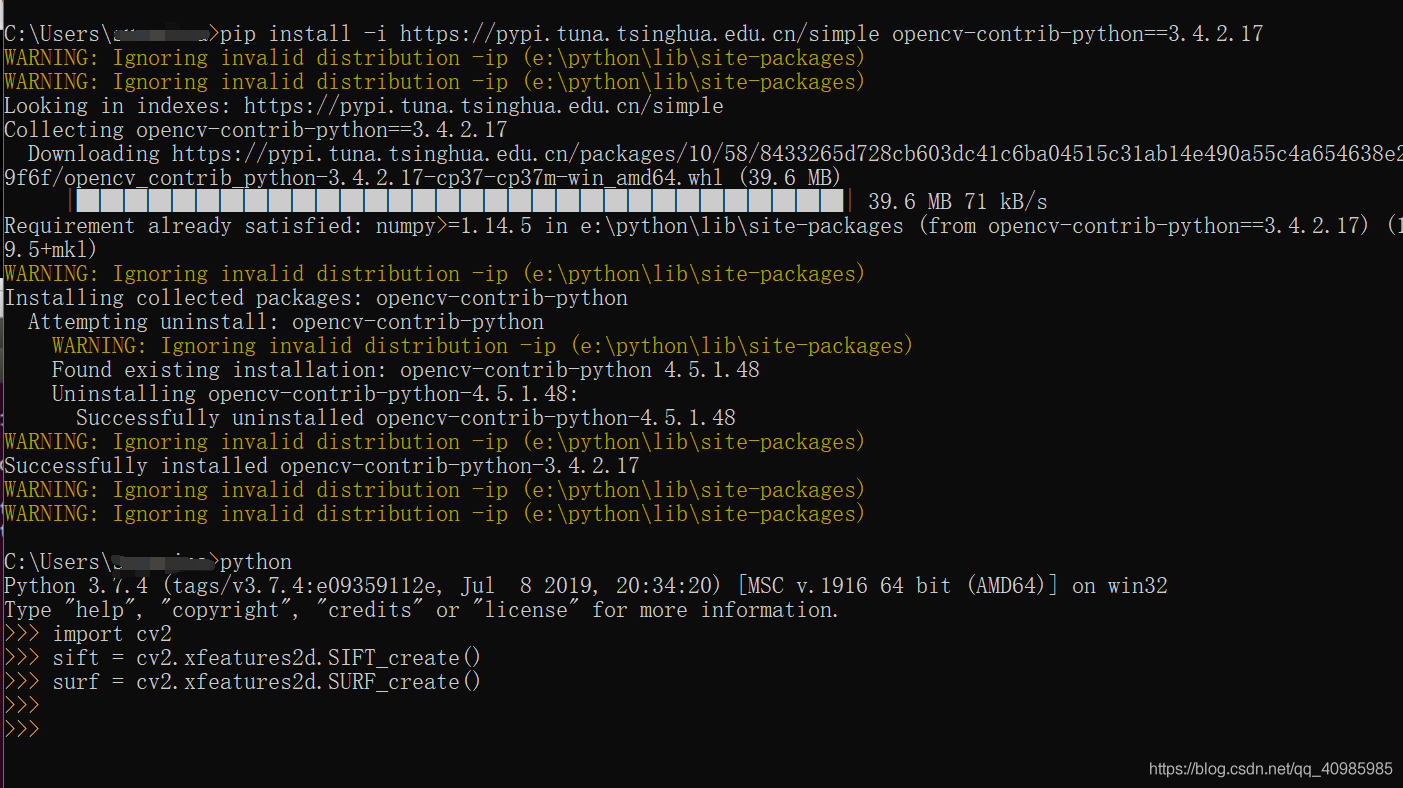
- 安裝指定版本opencv-contrib-python==3.4.2.17
pip uninstall opencv-python
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple opencv-contrib-python==3.4.2.17
可以看到成功了
3. 原始碼
# 尋找SURF關鍵點和描述符并繪制
import cv2
from matplotlib import pyplot as plt
img = cv2.imread('images/butterfly.jpg', 0)
# 創建SURF物件,可以在創建時指定引數也可以稍后設定引數
# 此處設定 Hessian閾值為 400
sift = cv2.xfeatures2d.SIFT_create()
print('sift: ', sift)
surf = cv2.xfeatures2d.SURF_create()
print('surf: ', surf,
' \ndefaultParameter\thessianThreshold: ', surf.getHessianThreshold(),
' upright: ', surf.getUpright(),
' extended: ', surf.getExtended(),
' descriptors: ',surf.descriptorSize())
# 尋找SURF關鍵點和描述符
# kp:回傳的關鍵點串列,des:numpy陣列
kp, des = surf.detectAndCompute(img, None)
# 繪制關鍵點在圖片上
img2 = cv2.drawKeypoints(img, kp, None, (255, 0, 0), 4)
plt.imshow(img2), plt.xticks([]), plt.yticks([]), plt.title('more keypoints'), plt.show()
print('keypoints: ', len(kp))
# 檢查當前Hessian閾值
# print(surf.getHessianThreshold())
# 調整Hessian閾值,此處設定為50000,但一般最佳設定為300~500
surf.setHessianThreshold(50000)
print(' parameters\thessianThreshold: ', surf.getHessianThreshold(),
' upright: ', surf.getUpright(),
' extended: ', surf.getExtended(),
' descriptors: ',surf.descriptorSize())
# 再一次計算關鍵點和描述符
kp, des = surf.detectAndCompute(img, None)
print('keypoints: ', len(kp))
# 繪制關鍵點在圖片上
img2 = cv2.drawKeypoints(img, kp, None, (255, 0, 0), 4)
plt.imshow(img2), plt.xticks([]), plt.yticks([]), plt.title('less than 50 keypoints'), plt.show()
# U-SURF不會計算方向
# print(surf.getUpright())
surf.setUpright(True)
print(' parameters\thessianThreshold: ', surf.getHessianThreshold(),
' upright: ', surf.getUpright(),
' extended: ', surf.getExtended(),
' descriptors: ',surf.descriptorSize())
# 重新計算關鍵點和描述符,并繪制
kp = surf.detect(img, None)
print('keypoints: ', len(kp))
img2 = cv2.drawKeypoints(img, kp, None, (255, 0, 0), 4)
plt.imshow(img2), plt.xticks([]), plt.yticks([]), plt.title('U-SURF'), plt.show()
# 所有方向顯示在同一方向,它比以前快多了,如果您正在處理方向不成問題的情況(如全景縫合)等,使用U-SURF會更好,
# 尋找描述符的大小
# print(surf.descriptorSize())
# extended為false,默認為64D
# print(surf.getExtended())
# 設定描述符為128D
surf.setExtended(True)
print(' parameters\thessianThreshold: ', surf.getHessianThreshold(),
' upright: ', surf.getUpright(),
' extended: ', surf.getExtended(),
' descriptors: ',surf.descriptorSize())
kp, des = surf.detectAndCompute(img, None)
print('keypoints: ',len(kp))
img2 = cv2.drawKeypoints(img, kp, None, (255, 0, 0), 4)
plt.imshow(img2), plt.xticks([]), plt.yticks([]), plt.title('128D res'), plt.show()
參考
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/291587.html
標籤:其他
上一篇:HWC格式(Torch)