文章目錄
- 軟體環境
- 1.編譯python3的cv_bridge
- 2.創建基于python3的影像ROS節點
- (1)初始化py3_test_ws作業空間
- (2)創建功能包
- (3)撰寫python3的影像發布和接收節點
- 攝像頭發布節點
- 攝像頭接收處理節點
- 3.運行節點
- (1)編譯
- (2)將作業空間添加進環境變數
- (3)運行節點
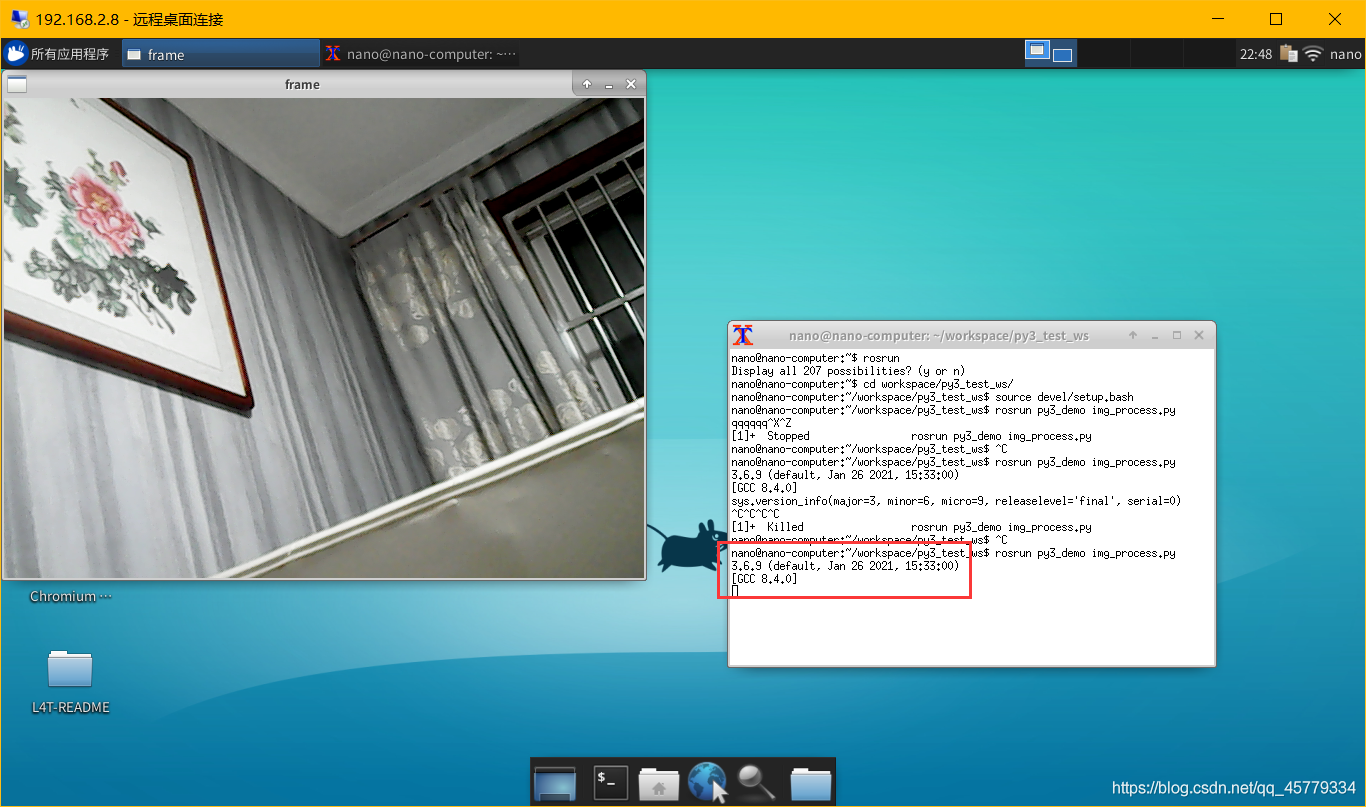
- 運行效果圖
親測可行,如有疑惑,直接先跳到最后查看效果圖~所使用的python為3.6.9,
軟體環境
-
Ubuntu18.04
-
python3.6.9
-
ROS Melodic
Jetson系列基礎環境配置:Jetson系列——Ubuntu18.04版本基礎配置(換源、ROS、遠程桌面、開機自連WIFi、SD卡備份)
樹莓派環境配置:樹莓派4B——Ubuntu 18.04.05安裝和基礎配置教程(包括WIFI和遠程桌面配置、ROS和主從機控制)
虛擬機環境配置:Ubuntu——雙系統Ubuntu18.04系統安裝和基礎配置并安裝ROS
1.編譯python3的cv_bridge
- ROS——基于Ubuntu18.04和ROS Melodic編譯python3的cv_bridge
2.創建基于python3的影像ROS節點
(1)初始化py3_test_ws作業空間
mkdir py3_test_ws && cd py3_test_ws
mkdir src && cd src
catkin_init_workspace
(2)創建功能包
catkin_create_pkg py3_demo rospy rosmsg roscpp
(3)撰寫python3的影像發布和接收節點
cd py3_demo && mkdir scripts
cd scripts && touch camera.py img_process.py
chmod +x camera.py
chmod +x img_process.py
將以下兩個節點代碼分別粘進對應的檔案中:
攝像頭發布節點
camera.py
#!/usr/bin/env python3
# coding:utf-8
import cv2
import numpy as np
import rospy
from std_msgs.msg import Header
from sensor_msgs.msg import Image
from cv_bridge import CvBridge , CvBridgeError
import time
if __name__=="__main__":
import sys
print(sys.version) # 查看python版本
capture = cv2.VideoCapture(0) # 定義攝像頭
rospy.init_node('camera_node', anonymous=True) #定義節點
image_pub=rospy.Publisher('/image_view/image_raw', Image, queue_size = 1) #定義話題
while not rospy.is_shutdown(): # Ctrl C正常退出,如果例外退出會報錯device busy!
start = time.time()
ret, frame = capture.read()
if ret: # 如果有畫面再執行
# frame = cv2.flip(frame,0) #垂直鏡像操作
frame = cv2.flip(frame,1) #水平鏡像操作
ros_frame = Image()
header = Header(stamp = rospy.Time.now())
header.frame_id = "Camera"
ros_frame.header=header
ros_frame.width = 640
ros_frame.height = 480
ros_frame.encoding = "bgr8"
# ros_frame.step = 1920
ros_frame.data = np.array(frame).tostring() #圖片格式轉換
image_pub.publish(ros_frame) #發布訊息
end = time.time()
print("cost time:", end-start ) # 看一下每一幀的執行時間,從而確定合適的rate
rate = rospy.Rate(25) # 10hz
capture.release()
cv2.destroyAllWindows()
print("quit successfully!")
攝像頭接收處理節點
img_process.py
#!/usr/bin/env python3
# coding:utf-8
import rospy
import numpy as np
from sensor_msgs.msg import Image
from cv_bridge import CvBridge, CvBridgeError
import cv2
def callback(data):
global bridge
cv_img = bridge.imgmsg_to_cv2(data, "bgr8")
cv2.imshow("frame" , cv_img)
cv2.waitKey(1)
if __name__ == '__main__':
import sys
print(sys.version) # 查看python版本
rospy.init_node('img_process_node', anonymous=True)
bridge = CvBridge()
rospy.Subscriber('/image_view/image_raw', Image, callback)
rospy.spin()
3.運行節點
(1)編譯
cd ../../..
catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3
(2)將作業空間添加進環境變數
sudo vim ~/.bashrc
source /home/nano/workspace/py3_test_ws/devel/setup.bash
(3)運行節點
roscore
rosun py3_demo camera.py
rosun py3_demo img_process.py
運行效果圖
可以看到,列印出的python版本為3.6.9:
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/293297.html
標籤:AI