在ROS中,兩個節點分別實作影像的發布與訂閱功能,以及在其中一個節點實作影像的預處理
文章目錄
- 在ROS中,兩個節點分別實作影像的發布與訂閱功能,以及在其中一個節點實作影像的預處理
- 前言
- 一、功能實作步驟詳情
- 二、節點作業環境
- 1.src檔案夾下的檔案
- 2.CMakeLists.txt
- 3.package.xml
- 三、兩節點代碼詳情
- 1.pic2msg.cpp
- 2.msg2video.cpp
- 四、編譯,并運行節點
- 1.在作業空間打開一個終端,輸入指令:catkin_make
- 2.打開新終端,運行roscore
- 3. 在絕對路徑打開新終端,運行第一個節點pic2msg
- 4.在絕對路徑打開新終端,運行第二個節點msg2video
- 5.運行結果
- 6.在rviz可查看新舊話題發布情況
- 五、參考資料
前言
最近正在學校實訓,學習的是智能機器人綜合設計,這周的任務量是兩節點影像的發布與訂閱,然后是影像預處理,
環境為ubuntu14.04
一、功能實作步驟詳情
(1)創建兩個節點,pic2msg 和 video2msg1;
第一個節點pic2msg在代碼pic2msg.cpp 話題(topic)中發布影像message;
第二個節點msg2video在代碼msg2video.cpp話題(topic)中訂閱影像message;
(2)節點msg2video把訂閱的圖片資訊(message)轉換為opencv格式的影像進行預處理,之后節點msg2video把預處理后的圖片資訊(message)在話題(topic)msg2video.cpp下發布;
(3)pic2msg.cpp訂閱video2msg1.cpp中預處理后的影像資訊;
二、節點作業環境
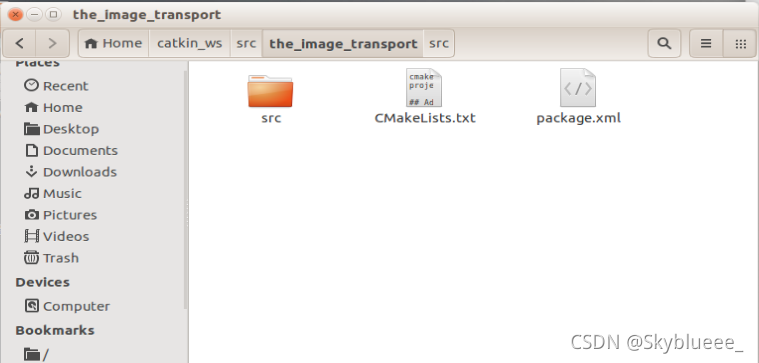
在作業空間~home/catkin_ws/src下新建檔案夾the_image_transport,在此檔案夾下新建src(檔案夾)、CMakeList.cpp(構建),package.xml(依賴),如圖所示:
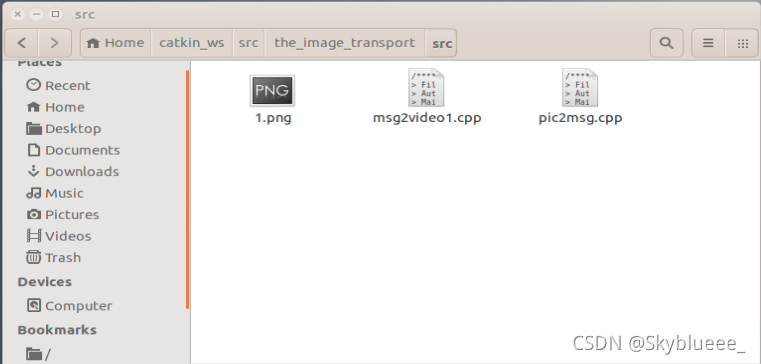
1.src檔案夾下的檔案
兩個節點pic2msg 和 video2msg1,1.png預處理的圖片,
2.CMakeLists.txt
代碼如下(示例):
cmake_minimum_required(VERSION 2.8.3)
project(the_image_transport)
## Add support for C++11, supported in ROS Kinetic and newer
# add_definitions(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
cv_bridge
image_transport
)
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES the_image_transport
# CATKIN_DEPENDS cv_bridge image_transport
# DEPENDS system_lib
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
# include_directories(include)
include_directories(
${catkin_INCLUDE_DIRS}
)
## Declare a C++ library
# add_library(${PROJECT_NAME}
# src/${PROJECT_NAME}/the_image_transport.cpp
# )
## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
# add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
# add_executable(${PROJECT_NAME}_node src/the_image_transport_node.cpp)
add_executable(${PROJECT_NAME}_video2msg src/video2msg.cpp) #攝像頭轉化為圖片
add_executable(${PROJECT_NAME}_msg2video src/msg2video.cpp) #得到傳感器的topic
add_executable(${PROJECT_NAME}_msg2video1 src/msg2video1.cpp) #得到傳感器的topic
add_executable(${PROJECT_NAME}_pic2msg src/pic2msg.cpp)
## Rename C++ executable without prefix
## The above recommended prefix causes long target names, the following renames the
## target back to the shorter version for ease of user use
## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
## Add cmake target dependencies of the executable
## same as for the library above
# add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Specify libraries to link a library or executable target against
# target_link_libraries(${PROJECT_NAME}_node
# ${catkin_LIBRARIES}
# )
target_link_libraries(${PROJECT_NAME}_video2msg
${catkin_LIBRARIES}
)
target_link_libraries(${PROJECT_NAME}_msg2video
${catkin_LIBRARIES}
)
target_link_libraries(${PROJECT_NAME}_msg2video1
${catkin_LIBRARIES}
)
target_link_libraries(${PROJECT_NAME}_pic2msg
${catkin_LIBRARIES}
)
3.package.xml
代碼如下(示例):
<?xml version="1.0"?>
<package>
<name>the_image_transport</name>
<version>0.0.0</version>
<description>The the_image_transport package</description>
<!-- One maintainer tag required, multiple allowed, one person per tag -->
<!-- Example: -->
<!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> -->
<maintainer email="ros@todo.todo">ros</maintainer>
<!-- One license tag required, multiple allowed, one license per tag -->
<!-- Commonly used license strings: -->
<!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 -->
<license>TODO</license>
<!-- <test_depend>gtest</test_depend> -->
<buildtool_depend>catkin</buildtool_depend>
<build_depend>cv_bridge</build_depend>
<build_depend>image_transport</build_depend>
<run_depend>cv_bridge</run_depend>
<run_depend>image_transport</run_depend>
<!-- The export tag contains other, unspecified, tags -->
<export>
<!-- Other tools can request additional information be placed here -->
</export>
</package>
三、兩節點代碼詳情
1.pic2msg.cpp
代碼如下(示例):
#include <ros/ros.h>
#include <image_transport/image_transport.h>
#include <opencv2/highgui/highgui.hpp>
#include <cv_bridge/cv_bridge.h>
void imageCallback(const sensor_msgs::ImageConstPtr& tem_msg)
{
try
{
cv::imshow("canny image->pub", cv_bridge::toCvShare(tem_msg, "bgr8")->image);
cv::waitKey(30);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("Could not convert from '%s' to 'bgr8'.", tem_msg->encoding.c_str());
}
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "image_node_a");
ros::NodeHandle nh;
image_transport::ImageTransport it(nh);
image_transport::Publisher pub = it.advertise("camera/image", 1);
image_transport::Subscriber sub = it.subscribe("camera/rgb/image_raw",1,imageCallback);
//cv::Mat image = cv::imread(argv[1], CV_LOAD_IMAGE_COLOR);
cv::Mat image = cv::imread(argv[1], CV_LOAD_IMAGE_COLOR);
cv::waitKey(30);
sensor_msgs::ImagePtr msg = cv_bridge::CvImage(std_msgs::Header(), "bgr8", image).toImageMsg();
ros::Rate loop_rate(5);
while (nh.ok()) {
pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
}
}
2.msg2video.cpp
代碼如下(示例):
#include "ros/ros.h"
#include "image_transport/image_transport.h"
#include "cv_bridge/cv_bridge.h"
#include "sensor_msgs/image_encodings.h"
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
#include <cstring> //std::string std::to_string
using namespace std;
using namespace cv;
namespace enc = sensor_msgs::image_encodings;
class ImageConvertor
{
ros::NodeHandle nh_;
image_transport::ImageTransport it_;
image_transport::Subscriber image_sub_;
image_transport::Publisher image_pub_;
public:
ImageConvertor():it_(nh_)
{
//發布話題out
image_pub_ = it_.advertise("camera/rgb/image_raw", 1);
//訂閱話題camera/image
image_sub_ = it_.subscribe("camera/image", 1, &ImageConvertor::ImageCb, this);
//cv::namedWindow(OUT_WINDOW, CV_WINDOW_AUTOSIZE);
//cv::namedWindow(IN_WINDOW, CV_WINDOW_AUTOSIZE);
}
~ImageConvertor()
{
//cv::destroyWindow(IN_WINDOW);
//cv::destroyWindow(OUT_WINDOW);
}
void ImageCb(const sensor_msgs::ImageConstPtr& msg)
{
cv_bridge::CvImagePtr cv_ptr;
try
{
/*轉化成CVImage*/
cv_ptr = cv_bridge::toCvCopy(msg, enc::BGR8);
cv::imshow("pub->sub",cv_ptr->image);
cv::waitKey(30);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("cv_bridge exception is %s", e.what());
return;
}
// Draw an example circle on the video stream
if (cv_ptr->image.rows > 40 && cv_ptr->image.cols > 60)
{
hello(cv_ptr->image);
image_pub_.publish(cv_ptr->toImageMsg());
}
}
//OpenCV的邊緣檢測程式
void detect_edges(cv::Mat img)
{
cv::Mat src, src_gray;
cv::Mat dst,dst1, detected_edges;
int edgeThresh = 1;
int lowThreshold = 200;
int highThreshold =300;
int kernel_size = 5;
img.copyTo(src);
cv::cvtColor( src, src_gray, CV_BGR2GRAY );
cv::blur( src_gray, detected_edges, cv::Size(5,5) );
cv::Canny( detected_edges, detected_edges, lowThreshold, highThreshold, kernel_size );
dst = cv::Scalar::all(0);
img.copyTo( dst, detected_edges);
dst.copyTo(img);
cv::imshow("sub->canny", dst);
cv::waitKey(3);
}
void hello(cv::Mat img)
{
cv::Mat src, src_gray,img_value;
cv::Mat dst,dst1, detected_edge;
RNG g_rng(12345);//亂數生成器
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
img.copyTo(src);
//轉換到灰度圖
cv::cvtColor(src, src_gray, CV_BGR2GRAY);
blur(src_gray, src_gray, cv::Size(3, 3), Point(-1, -1));
//二值化
cv::threshold(src_gray, img_value, 100, 255, CV_THRESH_BINARY_INV);
// 找出輪廓
findContours(img_value, contours, hierarchy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point(0, 0));
// 多邊形逼近輪廓 + 獲取矩形和圓形邊界框
vector<vector<Point> > contours_poly(contours.size());
vector<Rect> boundRect(contours.size());
vector<Point2f>center(contours.size());
vector<float>radius(contours.size());
//一個回圈,遍歷所有部分,進行本程式最核心的操作
for (unsigned int i = 0; i < contours.size(); i++)
{
approxPolyDP(Mat(contours[i]), contours_poly[i], 3, true);//用指定精度逼近多邊形曲線
boundRect[i] = boundingRect(Mat(contours_poly[i]));//計算點集的最外面(up-right)矩形邊界
minEnclosingCircle(contours_poly[i], center[i], radius[i]);//對給定的 2D點集,尋找最小面積的包圍圓形
}
// 繪制多邊形輪廓 + 包圍的矩形框 + 圓形框
Mat drawing = Mat::zeros(img_value.size(), CV_8UC3);
for (int unsigned i = 0; i < contours.size(); i++)
{
Scalar color = Scalar(g_rng.uniform(0, 255), g_rng.uniform(0, 255), g_rng.uniform(0, 255));//隨機設定顏色
drawContours(drawing, contours_poly, i, color, 1, 8, vector<Vec4i>(), 0, Point());//繪制輪廓
rectangle(drawing, boundRect[i].tl(), boundRect[i].br(), color, 2, 8, 0);//繪制矩形
circle(drawing, center[i], (int)radius[i], color, 2, 8, 0);//繪制圓
}
img.copyTo(dst,drawing);
dst.copyTo(img);
cv::imshow("text", dst);
cv::waitKey(3);
}
};
int main(int argc, char** argv)
{
ros::init(argc, argv, "image_listener");
ImageConvertor ic;
ros::spin();
return 0;
}
四、編譯,并運行節點
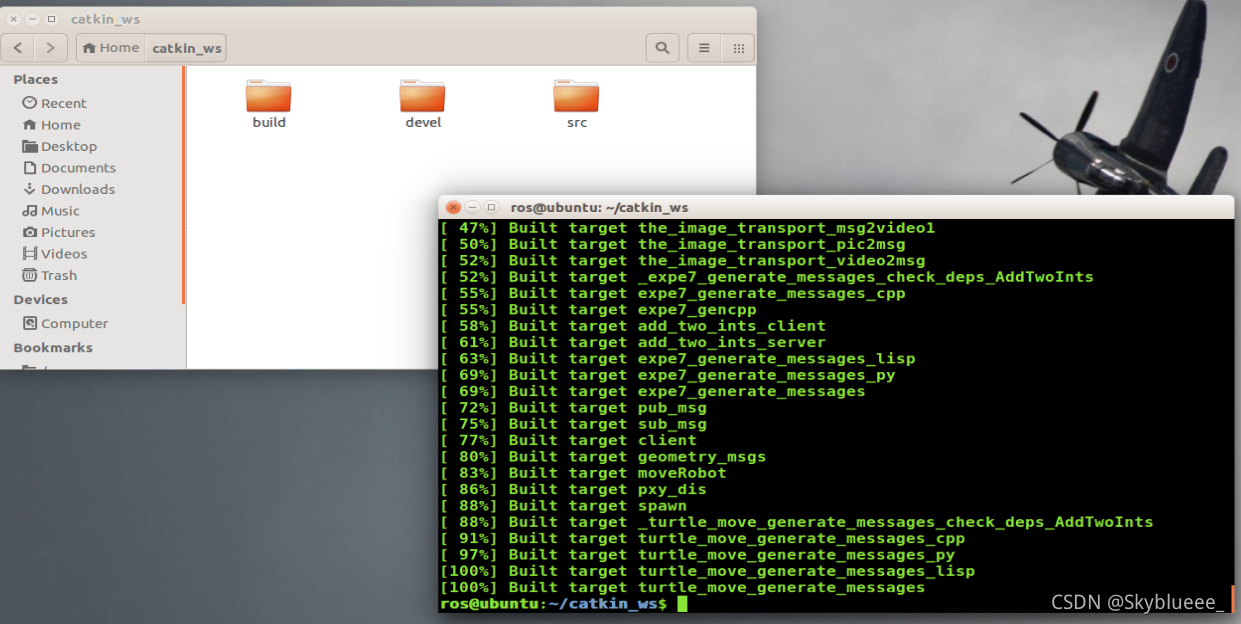
1.在作業空間打開一個終端,輸入指令:catkin_make
ros@ubuntu:~/catkin_ws$ catkin_make
2.打開新終端,運行roscore
輸入指令:roscore
ros@ubuntu:~$ roscore
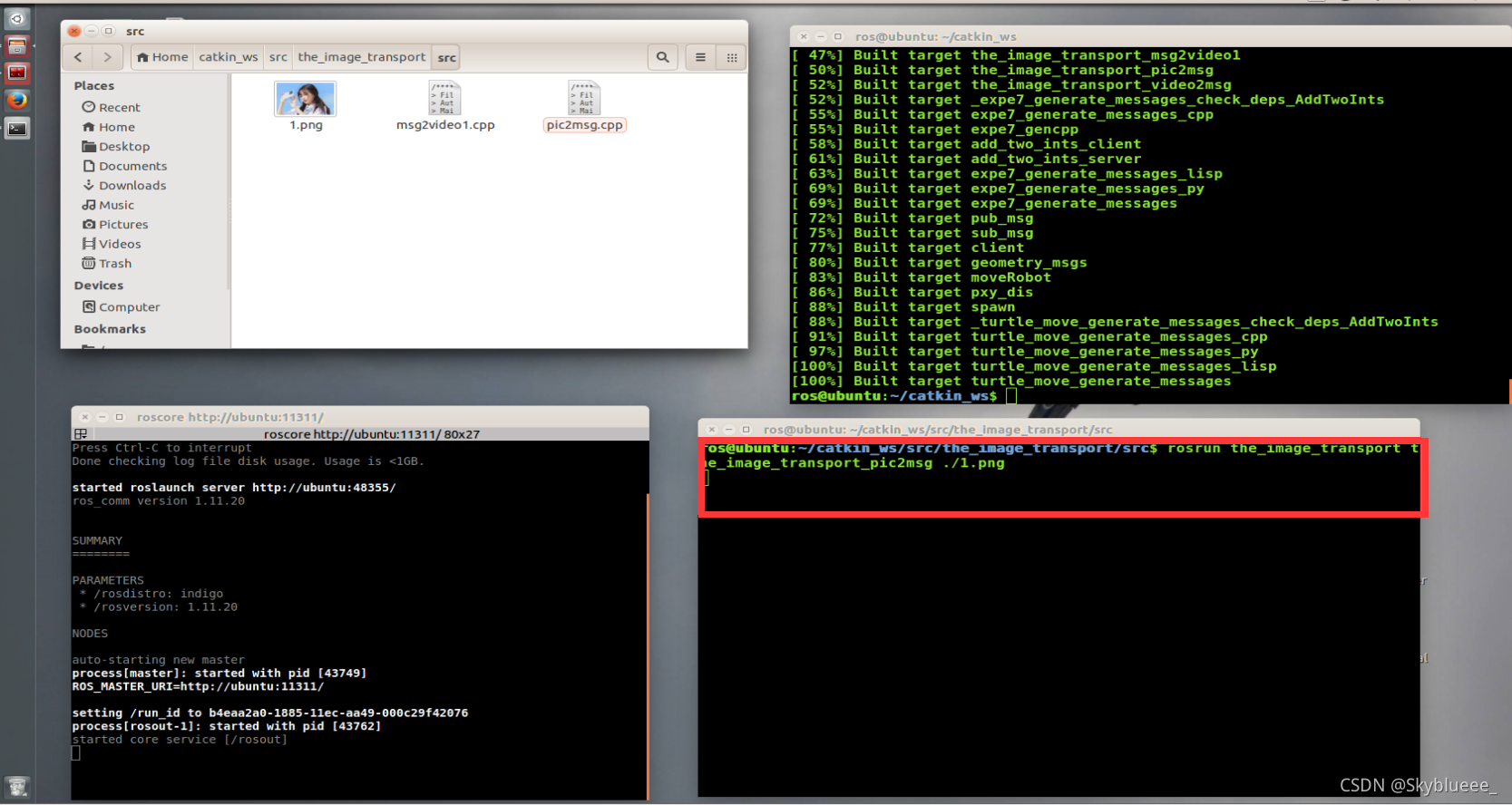
3. 在絕對路徑打開新終端,運行第一個節點pic2msg
輸入指令:rosrun the_image_transport the_image_transport_pic2msg ./1.png
ros@ubuntu:~/catkin_ws/src/the_image_transport/src$ rosrun the_image_transport the_image_transport_pic2msg ./1.png
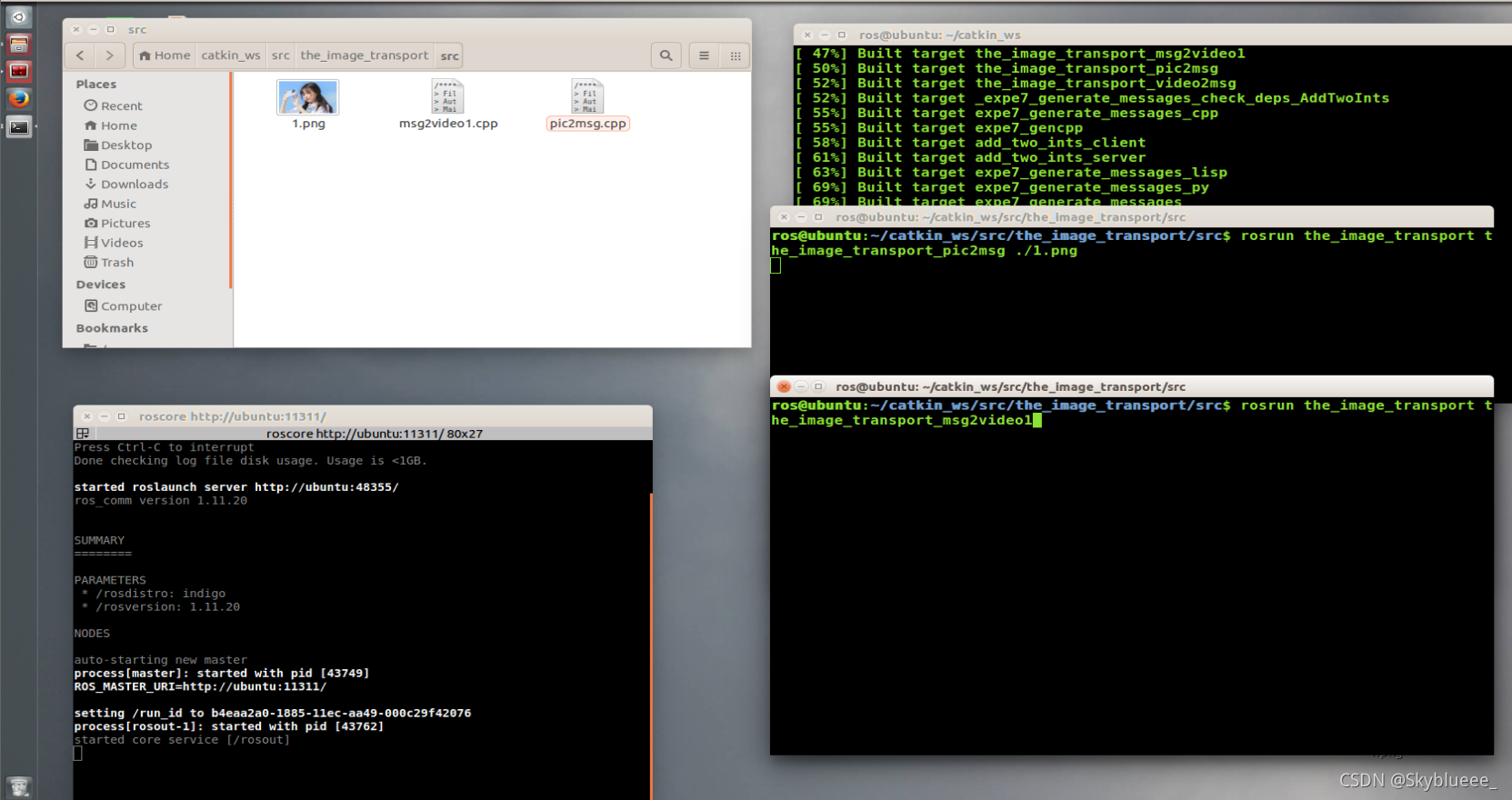
4.在絕對路徑打開新終端,運行第二個節點msg2video
輸入指令:rosrun the_image_transport the_image_transport_msg2video1
ros@ubuntu:~/catkin_ws/src/the_image_transport/src$ rosrun the_image_transport the_image_transport_msg2video1
5.運行結果

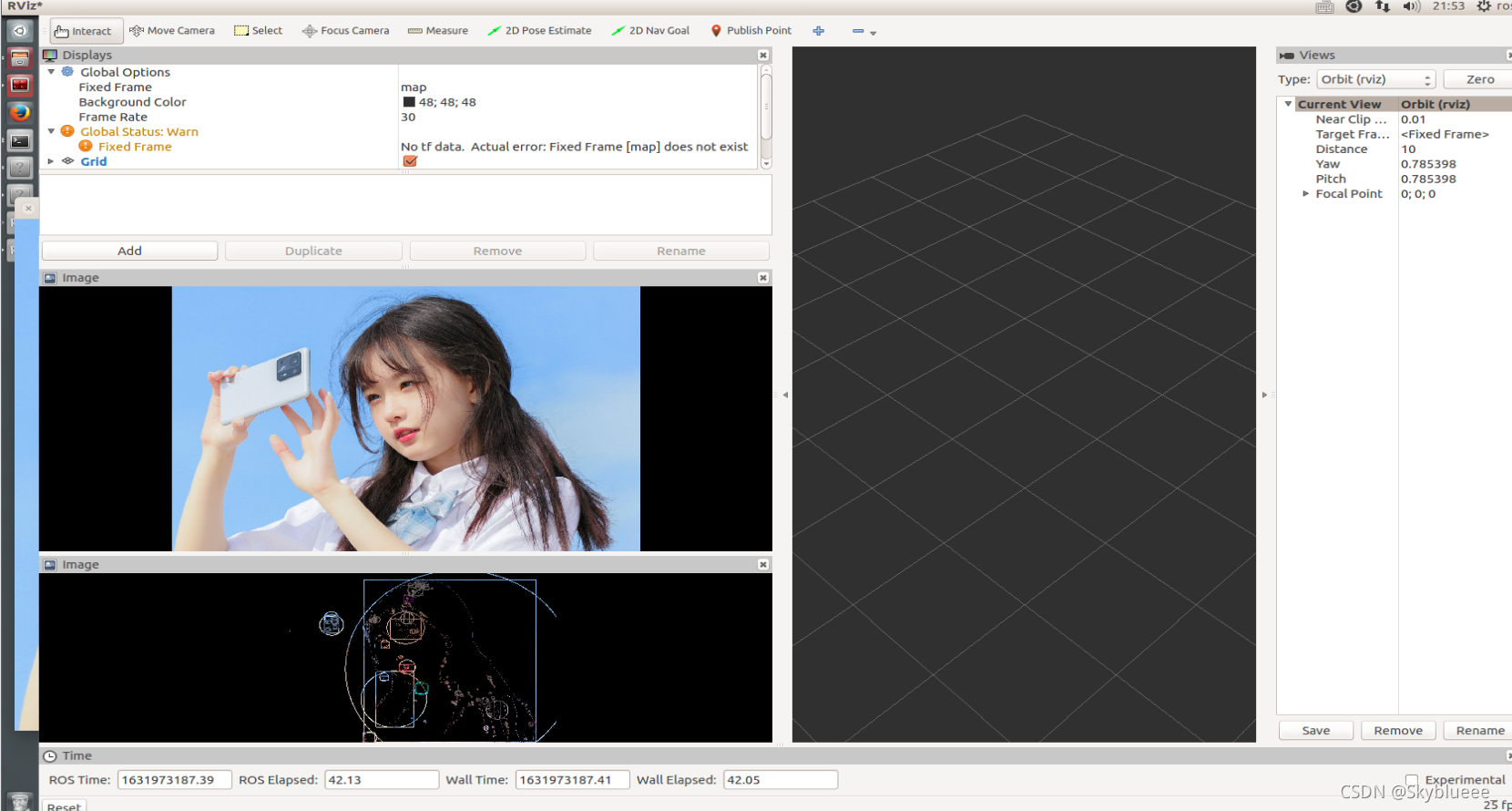
6.在rviz可查看新舊話題發布情況
在新終端輸入指令:rviz
ros@ubuntu:~$ rviz
分別添加新舊話題話題:
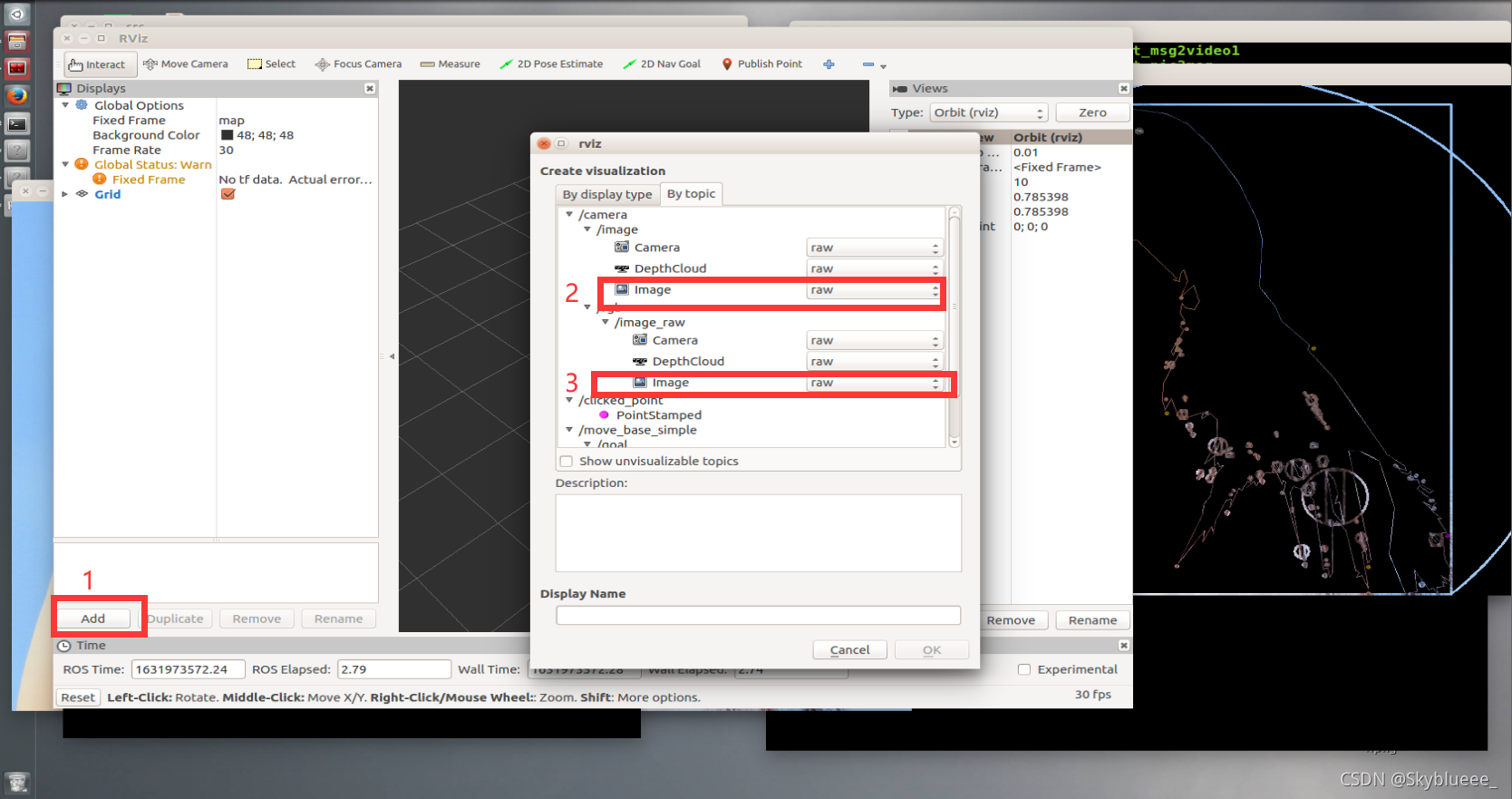
最終效果圖:
五、參考資料
圖片來源:小破站-Ja039up主(超級無敵可愛)
1 http://blog.csdn.net/github_30605157/article/details/50990493
2 http://blog.csdn.net/x_r_su/article/details/52704193
3 http://wiki.ros.org/image_transport/Tutorials
4 http://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber%28c%2B%2B%29
5.https://www.cnblogs.com/xingkongcanghai/p/11197111.html
6.https://blog.csdn.net/ding977921830/article/details/70168877?ops_request_misc=&request_id=&biz_id=102&utm_term=ros%20%E5%90%8C%E6%97%B6%E8%AE%A2%E9%98%85%E5%8F%91%E5%B8%83&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduweb~default-6-70168877.pc_search_result_hbase_insert&spm=1018.2226.3001.4187
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/301620.html
標籤:其他