目錄
1、如何解決光流跟蹤程序中丟失特征點的問題
2、ORB-SLAM2的作業流程:檢測功能點、立體聲匹配、功能匹配和運動估計
3、LK-ORB-SLAM2的作業流程
4、功能提取演算法
5、立體聲匹配
6、光流跟蹤
1、如何解決光流跟蹤程序中丟失特征點的問題
建議采用自適應匹配幀插入方案,以及時停止光流跟蹤,并在正確的時間插入匹配幀并檢測新功能點,以保持 LK-ORB-SLAM2 運行
2、ORB-SLAM2的作業流程:檢測功能點、立體聲匹配、功能匹配和運動估計
首先提取特征點,功能檢測后是立體聲匹配程序,然后,在前一幀中創建的場景點投影到當前幀中,并與當前幀匹配以獲得多個功能對應,最后,可以使用通用的 3D-2D 演算法計算運動,
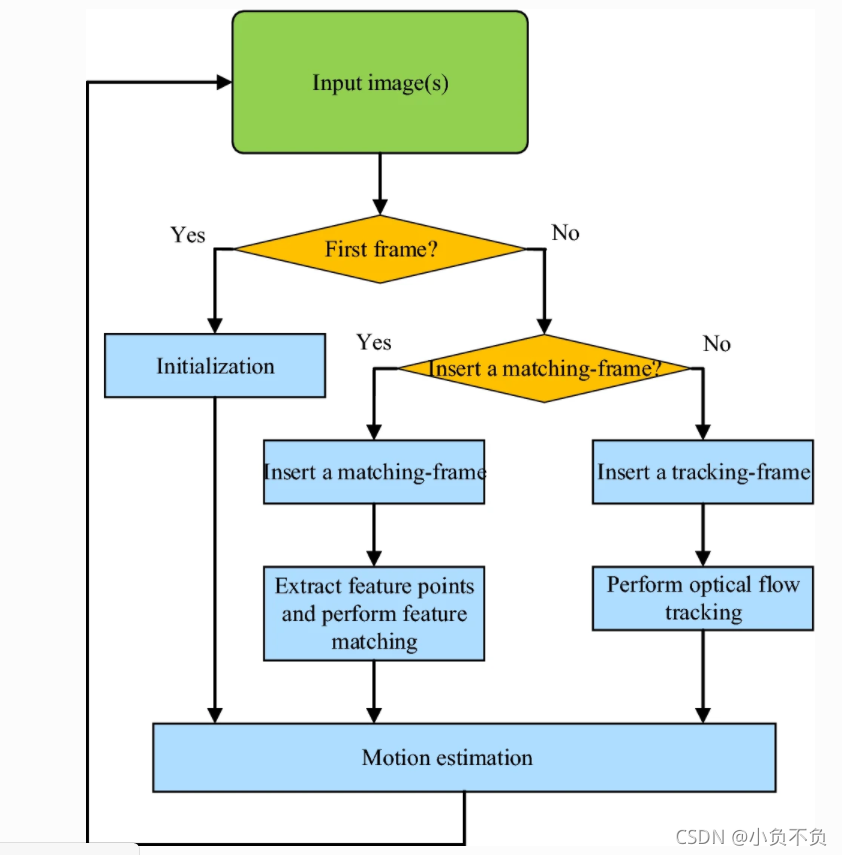
3、LK-ORB-SLAM2的作業流程
當 LK-ORB-SLAM2 加載幀時,它將確定幀是否是第一幀,如果是,LK-ORB-SLAM2 將執行初始化:檢測幀中的特征點,然后通過立體聲匹配獲得一些場景點(立體聲匹配的方法將在 Sect. 4.2中描述),第一幀將設定為匹配幀,初始化后,使用光流跟蹤功能點以獲取特征對應,功能點在相機運動期間不斷丟失,然后我們建議的匹配幀插入方案將在正確的時間插入匹配幀,(匹配幀插入方案將在第4.4條中描述),LK-ORB-SLAM2 將檢測匹配幀中的功能點,并執行功能匹配以獲取功能對應,當獲得足夠的函式時,可以使用通用的 PnP 演算法[3]計算運動(PnP 演算法的原則位于參考 [3]的這一節中:3D 到 2-D:來自三維結構和影像特征對應的運動),
流程圖
4、功能提取演算法
特征點的性能對視覺氣味學有指數級的影響,根據[17],ORB 比 SIFT 效率高得多, 并加快了強大的功能 (SURF)[27],ORB 基于加速段測驗 (FAST)[28]關鍵點探測器和二進制強健的獨立基本功能 (BRIEF)[29]描述符的功能,
ORB 的缺點是特征點的分布相對集中,這不利于在隨后的幀中找到這些點,ORB-SLAM2 將影像分成幾個矩形塊,并從每個矩形塊中單獨提取要點來解決這個問題,LK-ORB-SLAM2 使用此方法優化 ORB,
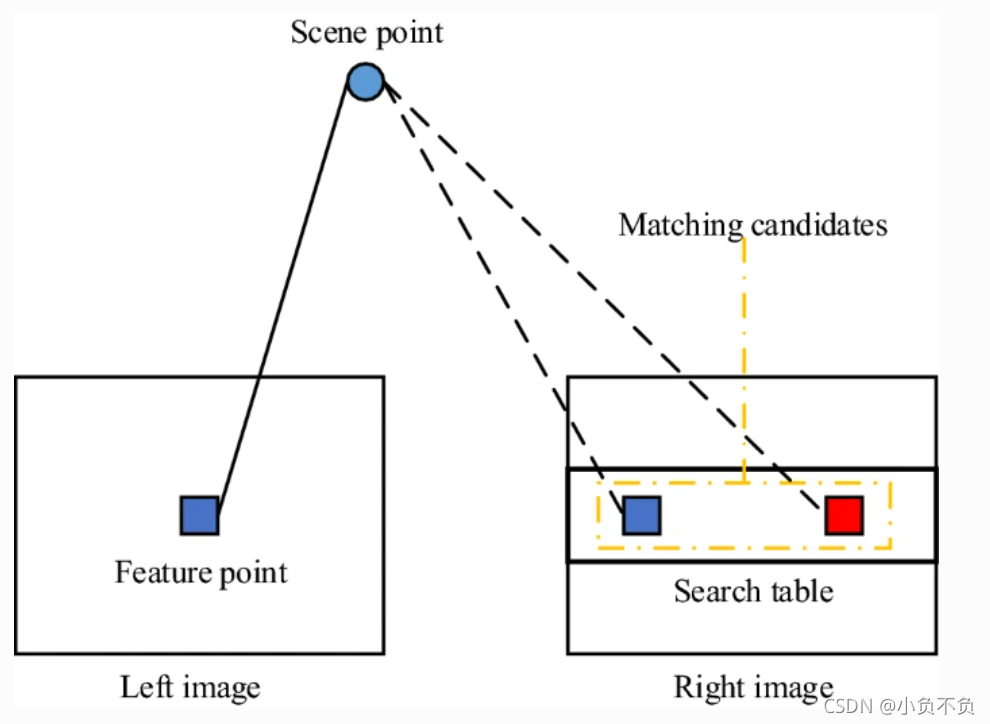
5、立體聲匹配
功能檢測后,將使用立體聲匹配演算法計算場景點的深度,圖3說明了立體聲匹配的程序,對于左影像中的藍色特征點,在右影像的同一行中創建帶形搜索區域,該區域中的點匹配候選者,對于右影像中的兩個匹配候選者,分別計算其簡要描述符,然后分別比較描述距離(有關特征描述符和距離比較的更多資訊,請參閱文獻[3]),距離較小的點是左圖中藍點的匹配點,
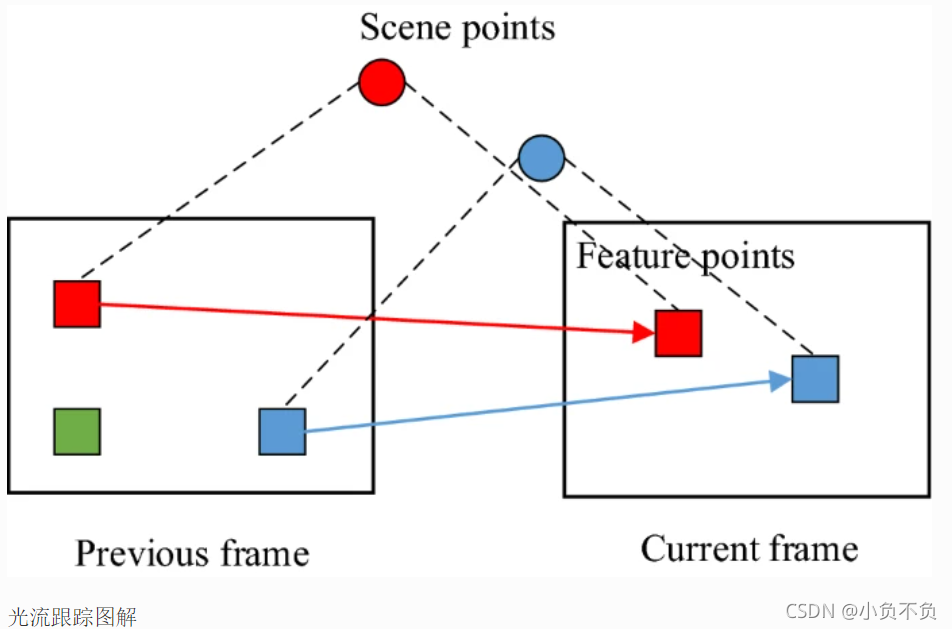
6、光流跟蹤
為了解決功能匹配需要太多時間的問題,LK-ORB-SLAM2 使用光流來計算前一幀中的功能點的移動,以便直接在當前幀中查找這些功能點,從而直接獲得功能對應,圖4顯示了光流跟蹤的程序,其中發現了兩個特征對應,
參考文獻:Fast stereo visual odometry based on LK optical flow and ORB-SLAM2
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/310672.html
標籤:其他
上一篇:OpenCV的影像加法運算
下一篇:換臉論文----《SimSwap An Efficient Framework For High Fidelity Face Swapping》決議