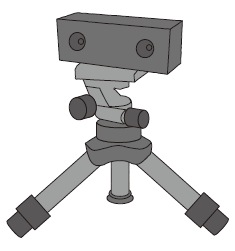
很久以前就有人在研究如何用相機來測量距所拍攝物體的距離,立體相機便是其中歷史最為悠久的一門技術,立體相機有使用膠卷的,也有連在計算機上使用的,這兩種立體相機都有兩個鏡頭(如圖所示),這兩個鏡頭就跟人類的眼睛一樣,利用雙眼視差(左右眼看到的角度不同)來捕捉距離,
正如我們所知,人類對空間進行立體上的認知時,利用的是雙眼視差原理(兩眼捕捉到的影像有所偏差),普通的立體相機利用的原理也跟它很相似,在此,我們來一邊了解這個原理,一邊思考立體相機的機制,
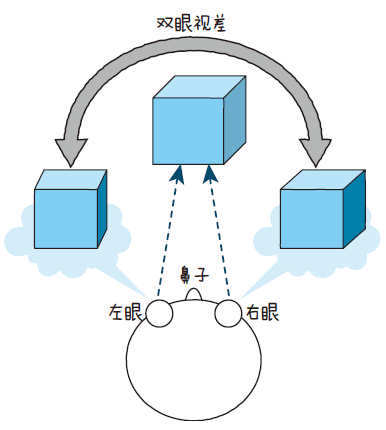
如下圖,大家用雙眼看物體時,左眼和右眼捕捉到的影像存在著微小的差異,這是因為左眼和右眼之間隔著幾厘米的距離,憑借這段距離,人類就能獲取捕捉物體立體影像時需要的資訊,于是,從這兩個有著微妙差距的位置中捕捉到的影像就在我們的大腦中得以合成,并作為立體影像被處理,
那么人類具體是如何感覺到縱深的呢?捕捉近處和遠處的物體時,我們的眼睛里又發生了什么呢 ?
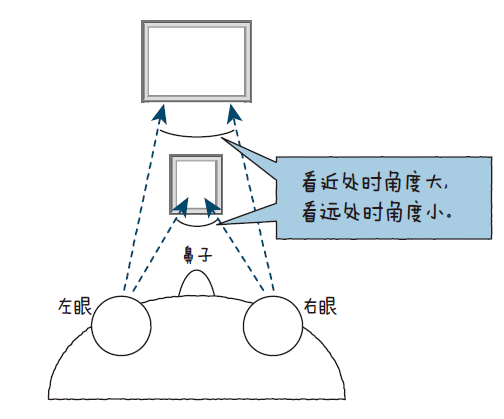
看近處的物體和看遠處的物體時,兩眼視線形成的角度(輻輳角)相差很大,離得遠,角度就小;離得近,角度就大,大腦負責把眼睛的轉動資訊與影像進行合成,這樣我們才能感覺到遠近,
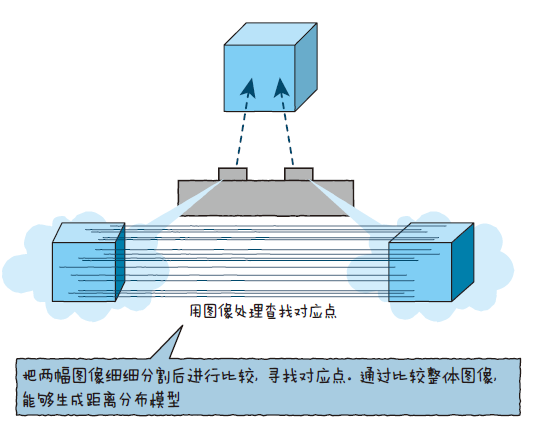
與此相對,立體相機中兩個鏡頭的角度通常是固定的,根據左右鏡頭拍攝的影像的差距,就可以測算出所拍攝影像中的距離,首先,把用一個鏡頭拍攝下來的影像細分成一幅幅小影像,接下來利用影像處理的手法,調查一下分割好的影像相當于另一個鏡頭所拍攝影像的哪個部分,這樣一來,就能知道影像某一部分會是另一個鏡頭中的哪一部分,雖然拍攝是在同一個地方,但鏡頭位置不同,所以會產生微小的偏差,對這個偏差進行幾何學計算,就能算出影像中的距離,另外,對分割的影像分別地反復進行同樣的操作,還能計算相機影像上任意一點的距離,從而制作出整體影像的距離分布模型,
立體相機是利用兩個鏡頭來計算距離的,基本上,只要兩個鏡頭里都有這個地方,就能對其進行測量,不過,如果兩幅影像間重復的地方太多,或是有透明玻璃等無法拍攝出來的地方,就無法測量相機到這些地方的距離,另外,如果想提升測量的精確度,則需要基于兩個鏡頭的距離關系,以及相機本身的規格來決定引數,
此外,也許是因為技術方面的成熟,近年很多汽車上配備的輔助功能(如快追尾時自動減速等)也應用了用立體相機測量距離這一測距方法,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/340539.html
標籤:其他
上一篇:人工智能、區塊鏈、物聯網學習筆記