目錄
- 引言
- 二,專案搭建
- 2.1 平臺選擇
- 2.2 開始搭建
- 三,資料集
- 3.1 資料集下載
- 3.2 上傳資料集
- 3.3 資料集的統計
- 四,專案運行
- 4.1 focal loss
- 4.2 訓練前準備
- 4.3 slowfast對資料集訓練
- 4.4 改進的slowfast對資料集訓練
- 4.5 實驗對比
- 4.6 實時查看GPU使用情況
引言
我最近一個月都在寫論文,反反復復改了不下20次,我覺得還是寫博客舒服,只要把思路寫清楚就可以,不用在乎用詞和語法問題,
本文所寫的改進方案適合資料集中資料存在不平衡的情況,資料越失衡,效果越好,
二,專案搭建
使用的專案的例子就用我之前的slowfast專案:
01【mmaction2 slowfast 行為分析(商用級別)】專案下載
02【mmaction2 slowfast 行為分析(商用級別)】專案demo搭建
2.1 平臺選擇
我還是用極鏈AI
創建實體:


2.2 開始搭建
進入home
cd home
下載專案
git clone https://github.com/Wenhai-Zhu/JN-OpenLib-mmaction2.git
或者用碼云(國內速度快)
git clone https://gitee.com/YFwinston/JN-OpenLib-mmaction2.git

環境搭建
pip install mmcv-full==1.2.7 -f https://download.openmmlab.com/mmcv/dist/cu102/torch1.6.0/index.html
pip install mmpycocotools
pip install moviepy opencv-python terminaltables seaborn decord -i https://pypi.douban.com/simple
進入JN-OpenLib-mmaction2
cd JN-OpenLib-mmaction2/
python setup.py develop
注意:上面的 cu102/torch1.6.0 一定要和創建環境的配置一直,cuda版本,torch版本
三,資料集
3.1 資料集下載
我們先在AI云平臺上創建上傳資料集,這個資料集是一個監控打架的資料集
鏈接: https://pan.baidu.com/s/1wI7PVB9g5k6CcVDOfICW7A 提取碼: du5o
這個資料集有6個動作分類:
options={'0':'None','1':'handshake', '2':'point', '3':'hug', '4':'push','5':'kick', '6':'punch'}
3.2 上傳資料集
我們要把資料集放到資料AI云平臺的資料管理的位置,放在這個位置,方便我們創建的所有實體的使用,
在根目錄下,進入user-data
cd user-data
創建slowfastDataSet檔案夾
mkdir slowfastDataSet
上傳資料集:采用下面鏈接對應的方法
https://cloud.videojj.com/help/docs/data_manage.html#vcloud-oss-cli
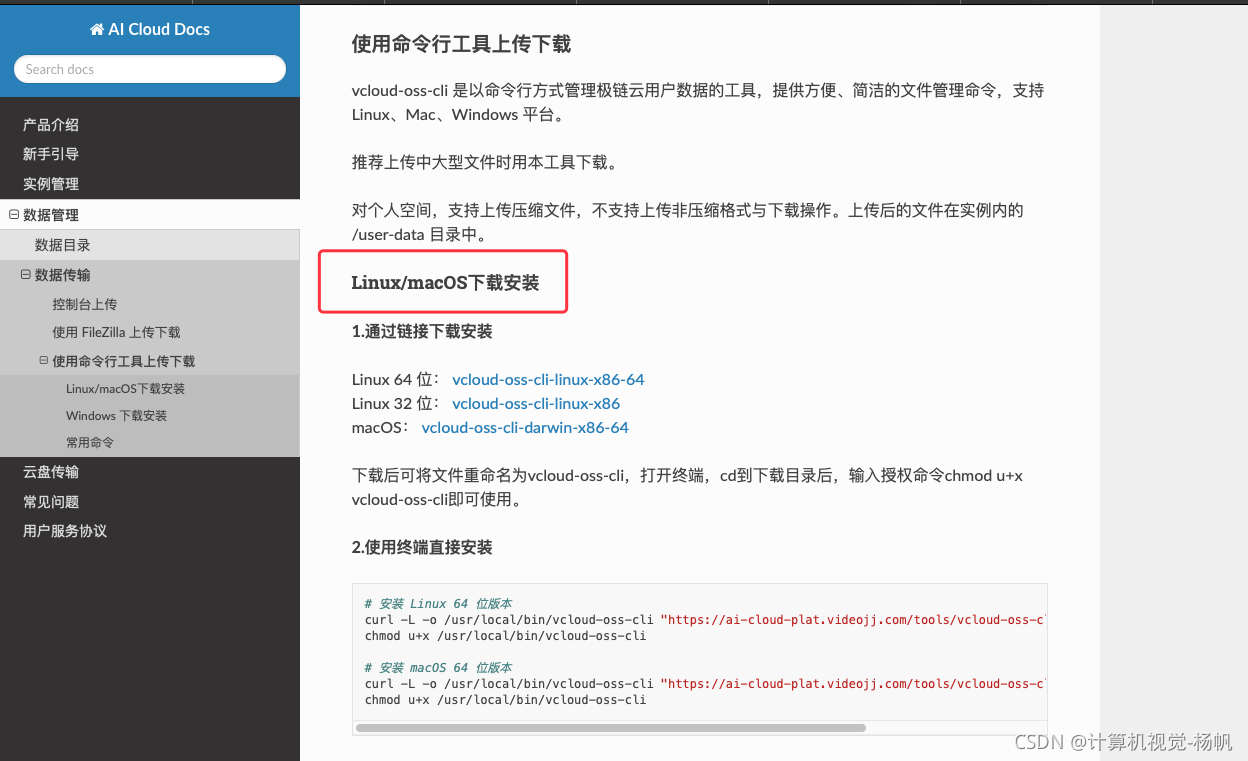
資料集上傳到slowfastDataSet檔案夾下
3.3 資料集的統計
使用本文的改進方案,最重要的就是確保這個資料集是不平衡的,所以,我們來對這個資料集每個類別進行資料統計,看看資料集是不是不平衡的,
我們在AI平臺上創建一個notebook(要在這里面寫資料集統計代碼)
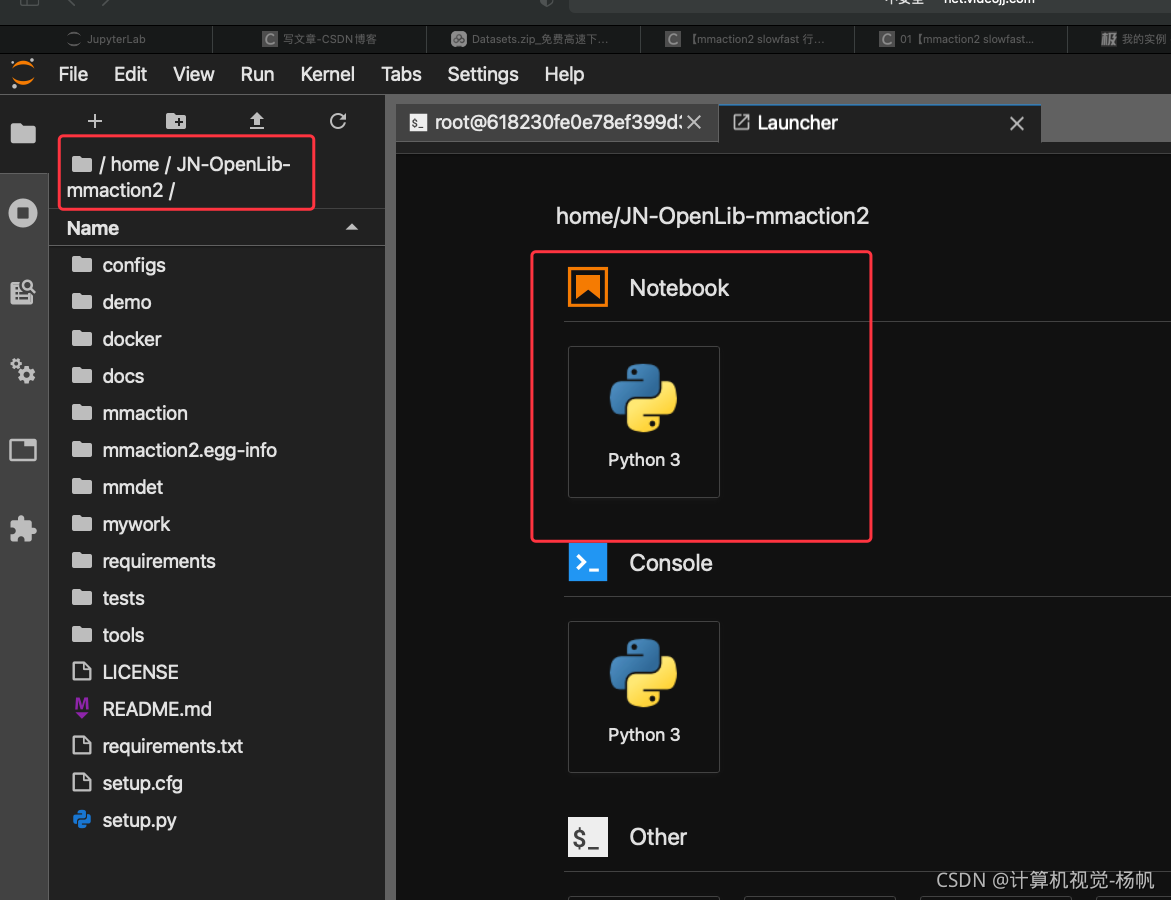
重命名為dataTemp.ipynb
代碼如下:
import json
#統計資料集中訓練集/測驗集的資料分布
file_dir = "/user-data/slowfastDataSet/Datasets/Interaction/annotations/train/"
#file_dir = "/user-data/slowfastDataSet/Datasets/Interaction/annotations/test/"
#訓練集/測驗集下檔案名字
names = ['seq1','seq2','seq3','seq4','seq6','seq7','seq8','seq9','seq11','seq12',
'seq13','seq14','seq16','seq17','seq18','seq19']
#names = ['seq5','seq10','seq15','seq20']
#動作類別統計
action1=0
action2=0
action3=0
action4=0
action5=0
action6=0
#開始統計
for name in names:
file_name = file_dir + name + '.json'
f = open(file_name, encoding='utf-8')
setting = json.load(f) # 把json檔案轉化為python用的型別
f.close()
for file_1 in setting['metadata']:
str = file_1.split("_")
if str[1].isdigit():
action = setting['metadata'][file_1]['av']['1']
actions = action.split(",")
if '1' in actions:
action1 = 1 + action1
if '2' in actions:
action2 = 1 + action2
if '3' in actions:
action3 = 1 + action3
if '4' in actions:
action4 = 1 + action4
if '5' in actions:
action5 = 1 + action5
if '6' in actions:
action6 = 1 + action6
print("action1",action1)
print("action2",action2)
print("action3",action3)
print("action4",action4)
print("action5",action5)
print("action6",action6)
當我們對訓練集進行統計時:
結果:
action1 1011
action2 709
action3 757
action4 358
action5 250
action6 320
當我們對測驗集進行統計時:
結果:
action1 243
action2 132
action3 209
action4 95
action5 64
action6 94
我們在用excel,把這些圖用圖表的形式展示出來,
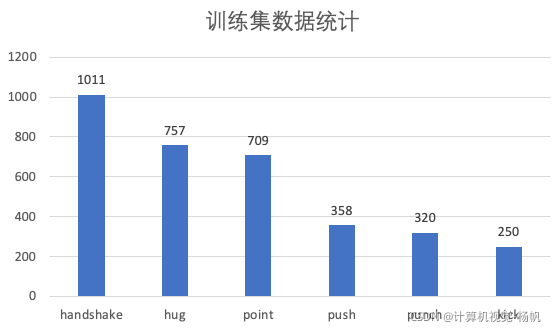
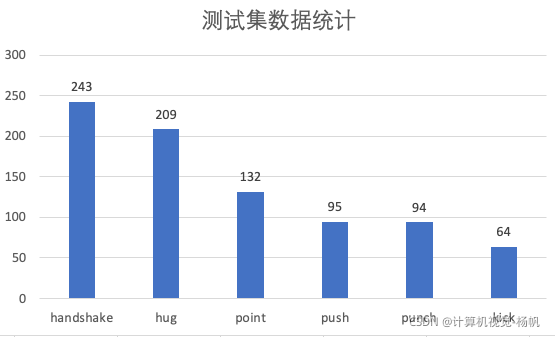
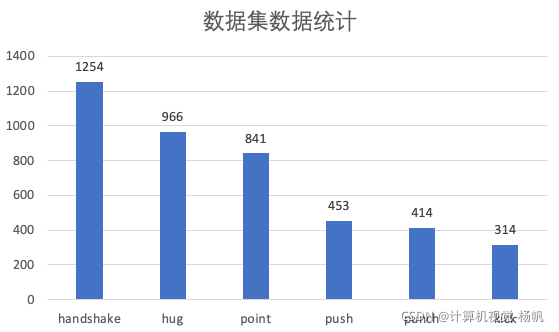
從上面統計資料來看,可以判斷這個資料集是不平衡的,
四,專案運行
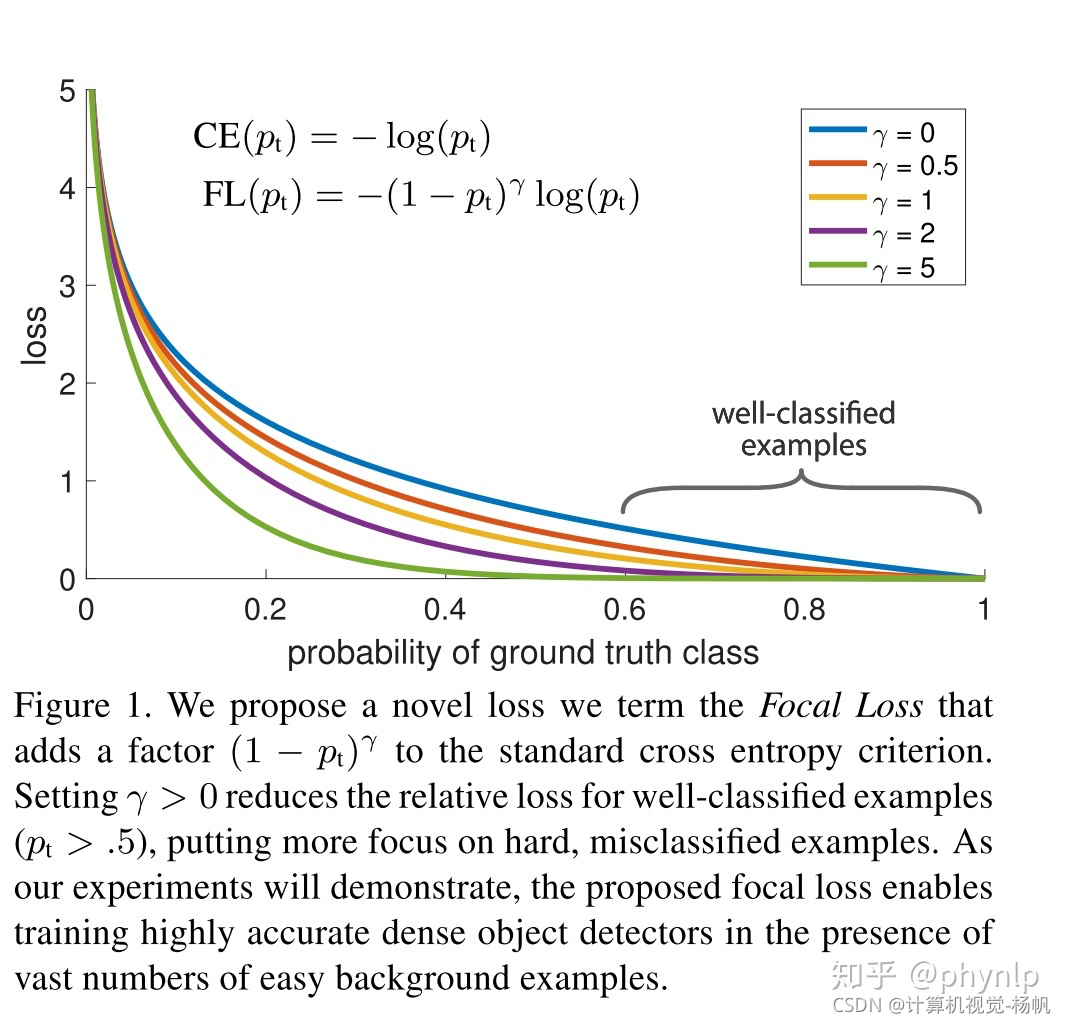
4.1 focal loss
簡而言之,focal loss的作用就是將預測值低的類,賦予更大的損失函式權重,在不平衡的資料中,難分類別的預測值低,那么這些難分樣本的損失函式被賦予的權重就更大,
4.2 訓練前準備
創建鏈接 /user-data/slowfastDataSet/Datasets 檔案夾的軟鏈接:
先進入JN-OpenLib-mmaction2
cd JN-OpenLib-mmaction2
創建軟鏈接
ln -s /user-data/slowfastDataSet/Datasets data
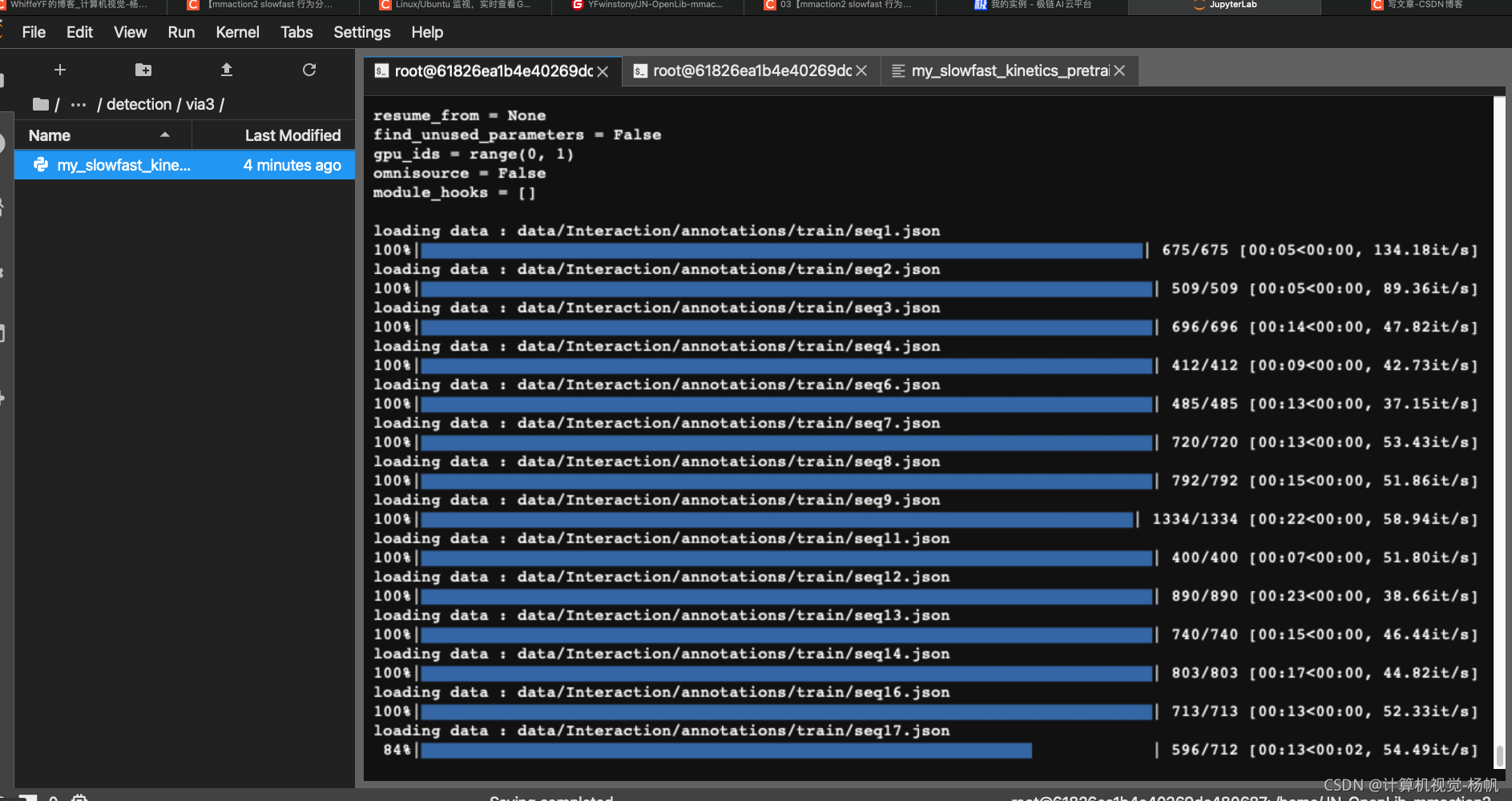
4.3 slowfast對資料集訓練
python tools/train.py configs/detection/via3/my_slowfast_kinetics_pretrained_r50_8x8x1_20e_via3_rgb.py --validate
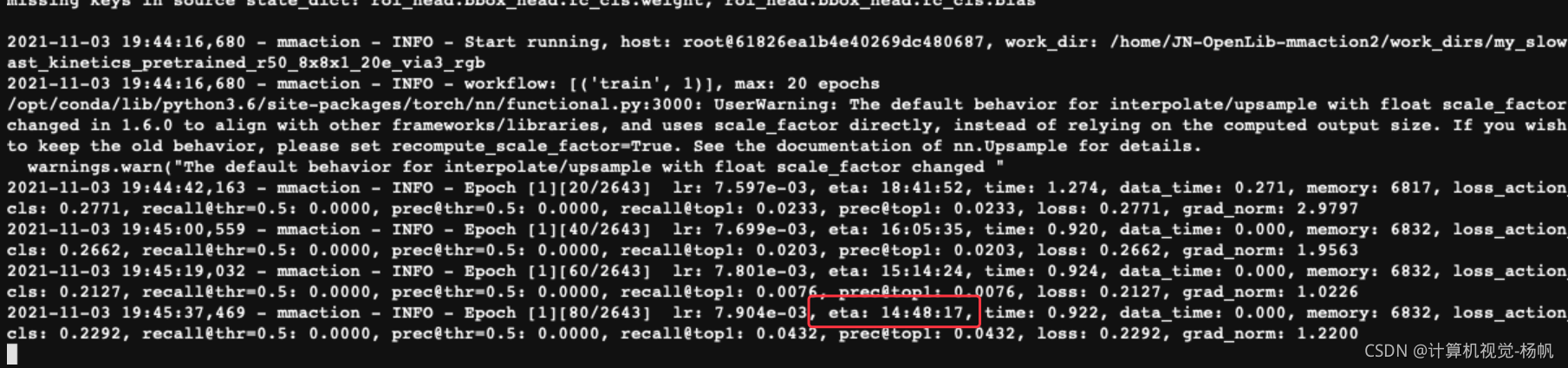
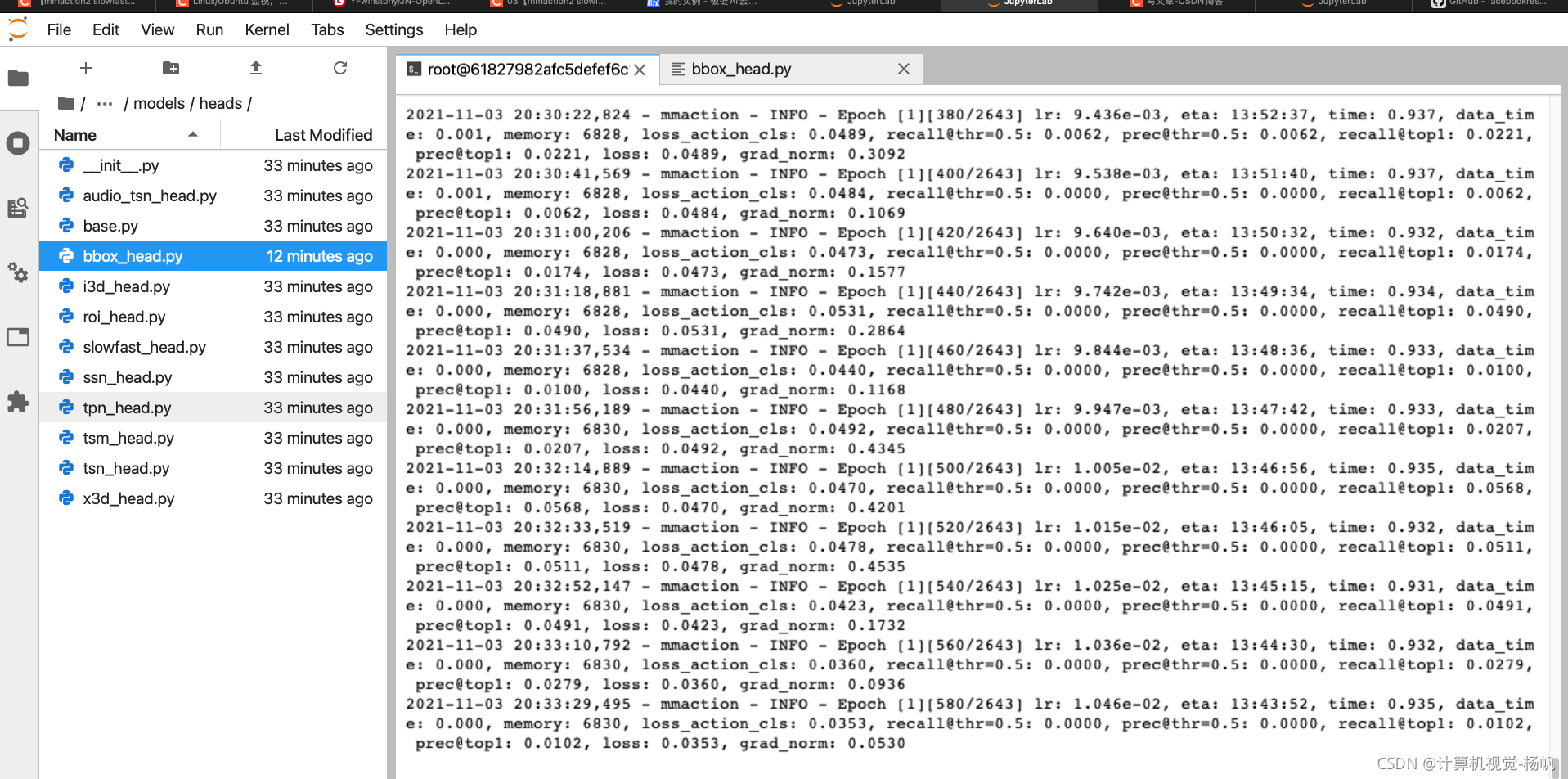
這里紅色框出來的地方代表訓練剩余時間
4.4 改進的slowfast對資料集訓練
修改slowfast損失函式的位置:home/JN-OpenLib-mmaction2/mmaction/models/heads/bbox_head.py
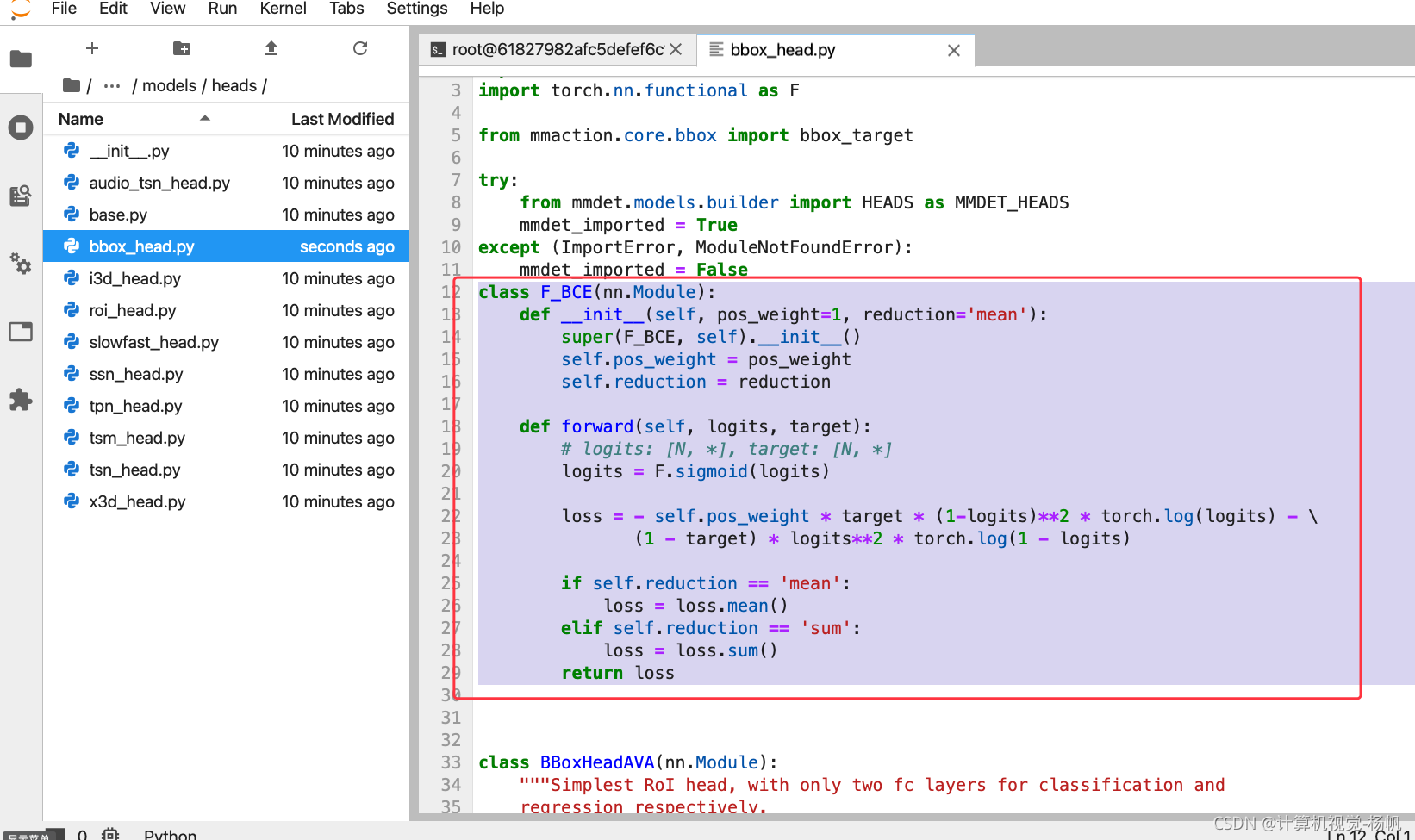
class F_BCE(nn.Module):
def __init__(self, pos_weight=1, reduction='mean'):
super(F_BCE, self).__init__()
self.pos_weight = pos_weight
self.reduction = reduction
def forward(self, logits, target):
# logits: [N, *], target: [N, *]
logits = F.sigmoid(logits)
loss = - self.pos_weight * target * (1-logits)**2 * torch.log(logits) - \
(1 - target) * logits**2 * torch.log(1 - logits)
if self.reduction == 'mean':
loss = loss.mean()
elif self.reduction == 'sum':
loss = loss.sum()
return loss
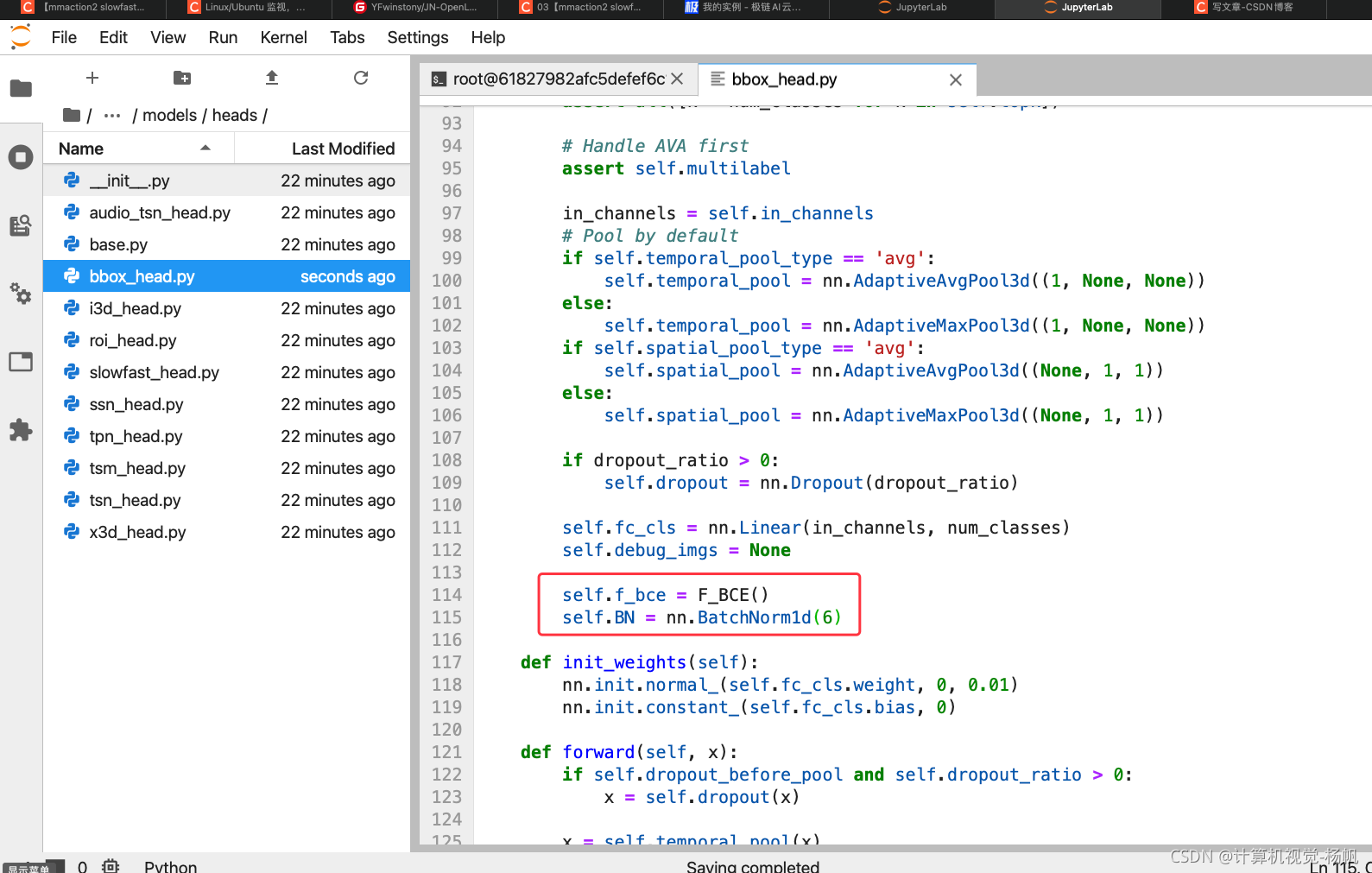
self.f_bce = F_BCE()
self.BN = nn.BatchNorm1d(8)
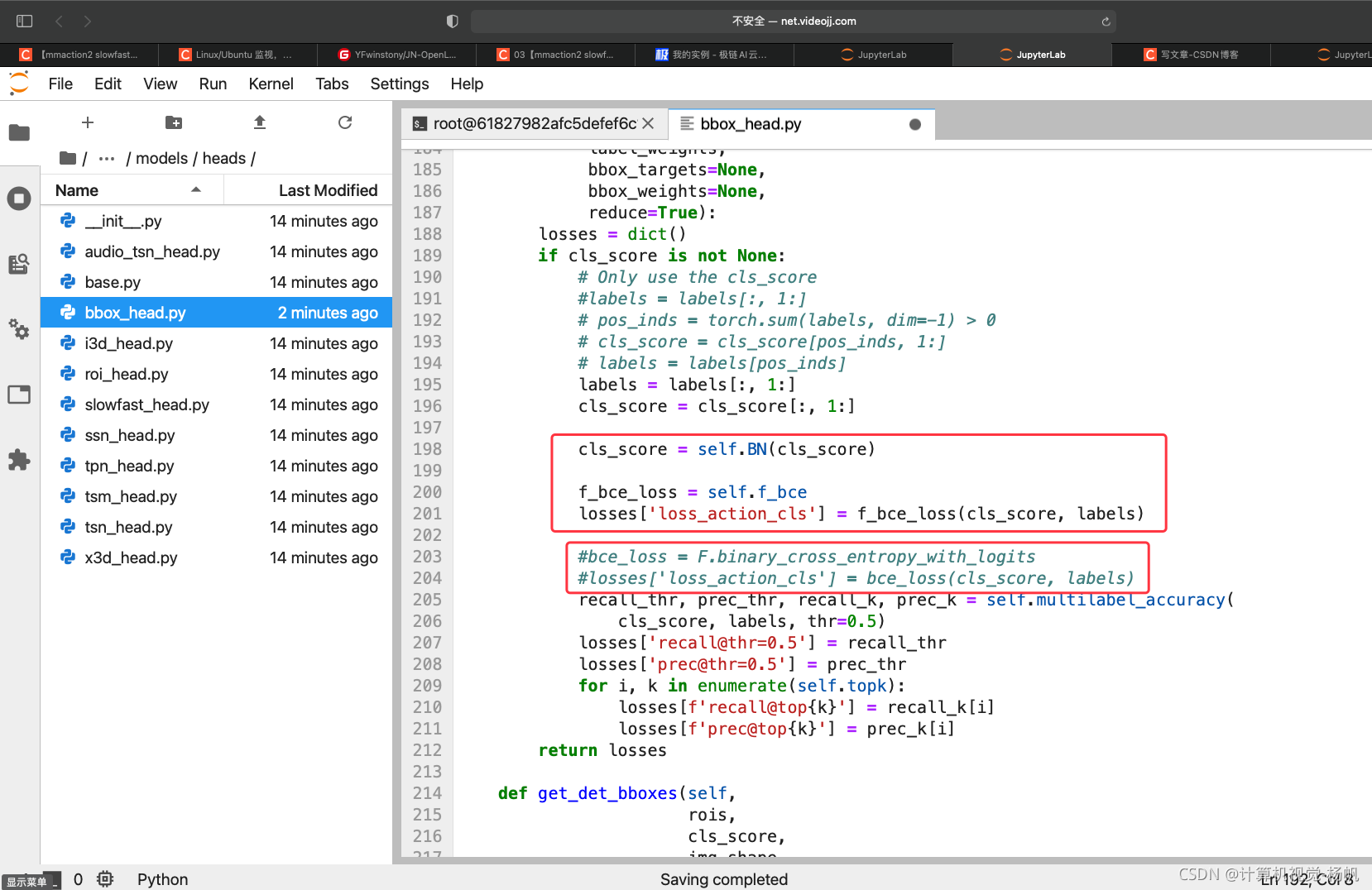
cls_score = self.BN(cls_score)
f_bce_loss = self.f_bce
losses['loss_action_cls'] = f_bce_loss(cls_score, labels)
bbox_head.py完整代碼如下:
import torch
import torch.nn as nn
import torch.nn.functional as F
from mmaction.core.bbox import bbox_target
try:
from mmdet.models.builder import HEADS as MMDET_HEADS
mmdet_imported = True
except (ImportError, ModuleNotFoundError):
mmdet_imported = False
class F_BCE(nn.Module):
def __init__(self, pos_weight=1, reduction='mean'):
super(F_BCE, self).__init__()
self.pos_weight = pos_weight
self.reduction = reduction
def forward(self, logits, target):
# logits: [N, *], target: [N, *]
logits = F.sigmoid(logits)
loss = - self.pos_weight * target * (1-logits)**2 * torch.log(logits) - \
(1 - target) * logits**2 * torch.log(1 - logits)
if self.reduction == 'mean':
loss = loss.mean()
elif self.reduction == 'sum':
loss = loss.sum()
return loss
class BBoxHeadAVA(nn.Module):
"""Simplest RoI head, with only two fc layers for classification and
regression respectively.
Args:
temporal_pool_type (str): The temporal pool type. Choices are 'avg' or
'max'. Default: 'avg'.
spatial_pool_type (str): The spatial pool type. Choices are 'avg' or
'max'. Default: 'max'.
in_channels (int): The number of input channels. Default: 2048.
num_classes (int): The number of classes. Default: 81.
dropout_ratio (float): A float in [0, 1], indicates the dropout_ratio.
Default: 0.
dropout_before_pool (bool): Dropout Feature before spatial temporal
pooling. Default: True.
topk (int or tuple[int]): Parameter for evaluating multilabel accuracy.
Default: (3, 5)
multilabel (bool): Whether used for a multilabel task. Default: True.
(Only support multilabel == True now).
"""
def __init__(
self,
temporal_pool_type='avg',
spatial_pool_type='max',
in_channels=2048,
# The first class is reserved, to classify bbox as pos / neg
num_classes=81,
dropout_ratio=0,
dropout_before_pool=True,
topk=(3, 5),
multilabel=True,
loss_cfg = None):
super(BBoxHeadAVA, self).__init__()
assert temporal_pool_type in ['max', 'avg']
assert spatial_pool_type in ['max', 'avg']
self.temporal_pool_type = temporal_pool_type
self.spatial_pool_type = spatial_pool_type
self.in_channels = in_channels
self.num_classes = num_classes
self.dropout_ratio = dropout_ratio
self.dropout_before_pool = dropout_before_pool
self.multilabel = multilabel
if topk is None:
self.topk = ()
elif isinstance(topk, int):
self.topk = (topk, )
elif isinstance(topk, tuple):
assert all([isinstance(k, int) for k in topk])
self.topk = topk
else:
raise TypeError('topk should be int or tuple[int], '
f'but get {type(topk)}')
# Class 0 is ignored when calculaing multilabel accuracy,
# so topk cannot be equal to num_classes
assert all([k < num_classes for k in self.topk])
# Handle AVA first
assert self.multilabel
in_channels = self.in_channels
# Pool by default
if self.temporal_pool_type == 'avg':
self.temporal_pool = nn.AdaptiveAvgPool3d((1, None, None))
else:
self.temporal_pool = nn.AdaptiveMaxPool3d((1, None, None))
if self.spatial_pool_type == 'avg':
self.spatial_pool = nn.AdaptiveAvgPool3d((None, 1, 1))
else:
self.spatial_pool = nn.AdaptiveMaxPool3d((None, 1, 1))
if dropout_ratio > 0:
self.dropout = nn.Dropout(dropout_ratio)
self.fc_cls = nn.Linear(in_channels, num_classes)
self.debug_imgs = None
self.f_bce = F_BCE()
self.BN = nn.BatchNorm1d(6)
def init_weights(self):
nn.init.normal_(self.fc_cls.weight, 0, 0.01)
nn.init.constant_(self.fc_cls.bias, 0)
def forward(self, x):
if self.dropout_before_pool and self.dropout_ratio > 0:
x = self.dropout(x)
x = self.temporal_pool(x)
x = self.spatial_pool(x)
if not self.dropout_before_pool and self.dropout_ratio > 0:
x = self.dropout(x)
x = x.view(x.size(0), -1)
cls_score = self.fc_cls(x)
# We do not predict bbox, so return None
return cls_score, None
def get_targets(self, sampling_results, gt_bboxes, gt_labels,
rcnn_train_cfg):
pos_proposals = [res.pos_bboxes for res in sampling_results]
neg_proposals = [res.neg_bboxes for res in sampling_results]
pos_gt_labels = [res.pos_gt_labels for res in sampling_results]
cls_reg_targets = bbox_target(pos_proposals, neg_proposals,
pos_gt_labels, rcnn_train_cfg)
return cls_reg_targets
def recall_prec(self, pred_vec, target_vec):
"""
Args:
pred_vec (tensor[N x C]): each element is either 0 or 1
target_vec (tensor[N x C]): each element is either 0 or 1
"""
correct = pred_vec & target_vec
# Seems torch 1.5 has no auto type conversion
recall = correct.sum(1) / (target_vec.sum(1).float()+ 1e-6)
prec = correct.sum(1) / (pred_vec.sum(1) + 1e-6)
return recall.mean(), prec.mean()
def multilabel_accuracy(self, pred, target, thr=0.5):
pred = pred.sigmoid()
pred_vec = pred > thr
# Target is 0 or 1, so using 0.5 as the borderline is OK
target_vec = target > 0.5
recall_thr, prec_thr = self.recall_prec(pred_vec, target_vec)
recalls, precs = [], []
for k in self.topk:
_, pred_label = pred.topk(k, 1, True, True)
pred_vec = pred.new_full(pred.size(), 0, dtype=torch.bool)
num_sample = pred.shape[0]
for i in range(num_sample):
pred_vec[i, pred_label[i]] = 1
recall_k, prec_k = self.recall_prec(pred_vec, target_vec)
recalls.append(recall_k)
precs.append(prec_k)
return recall_thr, prec_thr, recalls, precs
def loss(self,
cls_score,
bbox_pred,
rois,
labels,
label_weights,
bbox_targets=None,
bbox_weights=None,
reduce=True):
losses = dict()
if cls_score is not None:
# Only use the cls_score
#labels = labels[:, 1:]
# pos_inds = torch.sum(labels, dim=-1) > 0
# cls_score = cls_score[pos_inds, 1:]
# labels = labels[pos_inds]
labels = labels[:, 1:]
cls_score = cls_score[:, 1:]
cls_score = self.BN(cls_score)
f_bce_loss = self.f_bce
losses['loss_action_cls'] = f_bce_loss(cls_score, labels)
#bce_loss = F.binary_cross_entropy_with_logits
#losses['loss_action_cls'] = bce_loss(cls_score, labels)
recall_thr, prec_thr, recall_k, prec_k = self.multilabel_accuracy(
cls_score, labels, thr=0.5)
losses['recall@thr=0.5'] = recall_thr
losses['prec@thr=0.5'] = prec_thr
for i, k in enumerate(self.topk):
losses[f'recall@top{k}'] = recall_k[i]
losses[f'prec@top{k}'] = prec_k[i]
return losses
def get_det_bboxes(self,
rois,
cls_score,
img_shape,
flip=False,
crop_quadruple=None,
cfg = None):
# might be used by testing w. augmentation
if isinstance(cls_score, list):
cls_score = sum(cls_score) / float(len(cls_score))
assert self.multilabel
scores = cls_score.sigmoid() if cls_score is not None else None
bboxes = rois[:, 1:]
assert bboxes.shape[-1] == 4
# First reverse the flip
img_h, img_w = img_shape
if flip:
bboxes_ = bboxes.clone()
bboxes_[:, 0] = img_w - 1 - bboxes[:, 2]
bboxes_[:, 2] = img_w - 1 - bboxes[:, 0]
bboxes = bboxes_
# Then normalize the bbox to [0, 1]
bboxes[:, 0::2] /= img_w
bboxes[:, 1::2] /= img_h
def _bbox_crop_undo(bboxes, crop_quadruple):
decropped = bboxes.clone()
if crop_quadruple is not None:
x1, y1, tw, th = crop_quadruple
decropped[:, 0::2] = bboxes[..., 0::2] * tw + x1
decropped[:, 1::2] = bboxes[..., 1::2] * th + y1
return decropped
bboxes = _bbox_crop_undo(bboxes, crop_quadruple)
return bboxes, scores
if mmdet_imported:
MMDET_HEADS.register_module()(BBoxHeadAVA)
開始訓練:
python tools/train.py configs/detection/via3/my_slowfast_kinetics_pretrained_r50_8x8x1_20e_via3_rgb.py --validate
4.5 實驗對比
經過15個小時的訓練
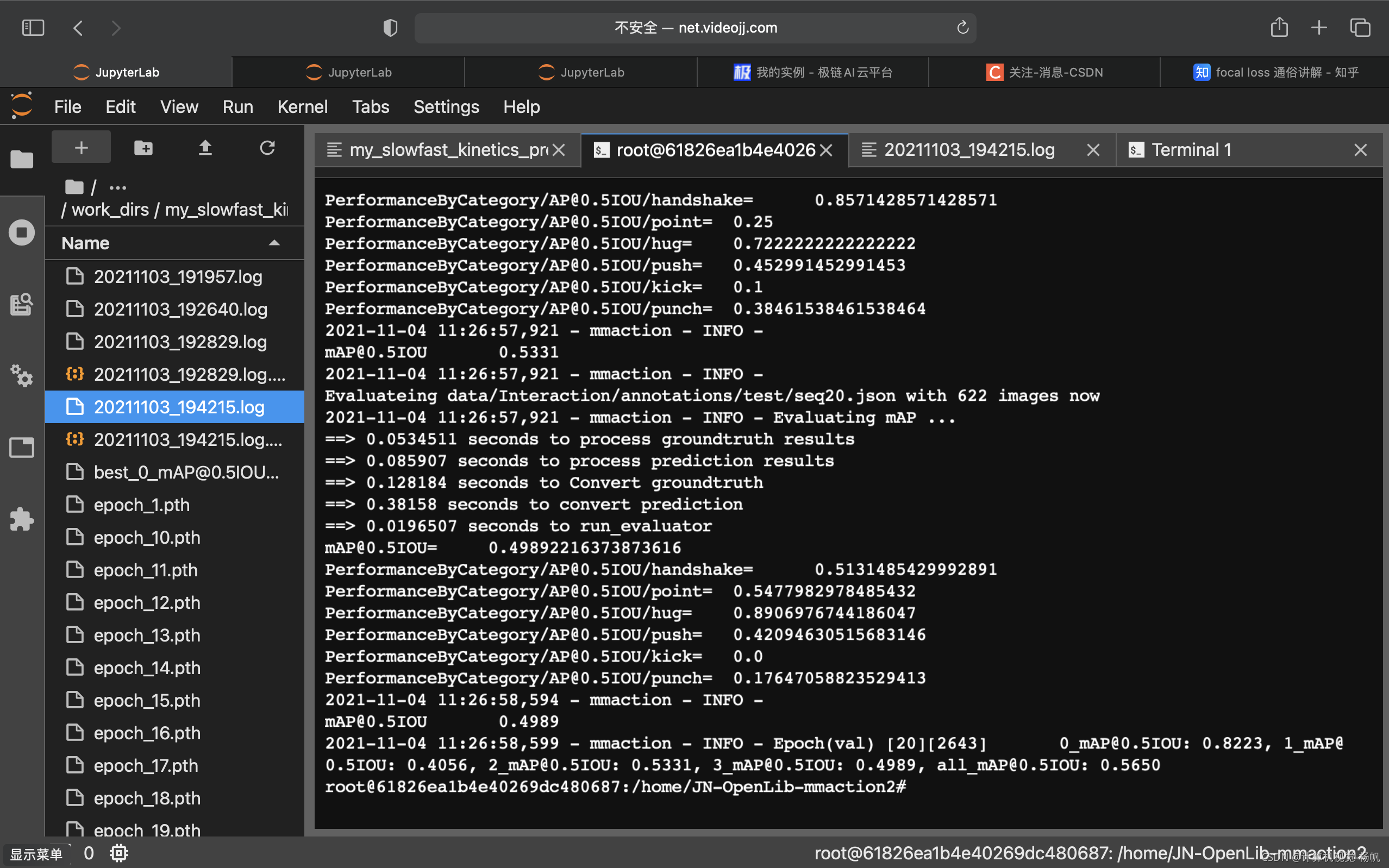
首先是原模型(改進前)
來看看結果
0s2021-11-04 11:26:56,234 - mmaction - INFO -
Evaluateing data/Interaction/annotations/test/seq5.json with 556 images now
2021-11-04 11:26:56,234 - mmaction - INFO - Evaluating mAP ...
==> 0.035635 seconds to process groundtruth results
==> 0.0550323 seconds to process prediction results
==> 0.122445 seconds to Convert groundtruth
==> 0.302411 seconds to convert prediction
==> 0.0125372 seconds to run_evaluator
mAP@0.5IOU= 0.822277391327469
PerformanceByCategory/AP@0.5IOU/handshake= 0.8867924528301887
PerformanceByCategory/AP@0.5IOU/point= 0.6091617933723197
PerformanceByCategory/AP@0.5IOU/hug= 0.7931456548347613
PerformanceByCategory/AP@0.5IOU/push= 0.8666666666666667
PerformanceByCategory/AP@0.5IOU/kick= 0.7
PerformanceByCategory/AP@0.5IOU/punch= 0.9945054945054945
2021-11-04 11:26:56,766 - mmaction - INFO -
mAP@0.5IOU 0.8223
2021-11-04 11:26:56,768 - mmaction - INFO -
Evaluateing data/Interaction/annotations/test/seq10.json with 557 images now
2021-11-04 11:26:56,768 - mmaction - INFO - Evaluating mAP ...
==> 0.0580194 seconds to process groundtruth results
==> 0.0607066 seconds to process prediction results
==> 0.097141 seconds to Convert groundtruth
==> 0.315272 seconds to convert prediction
==> 0.015708 seconds to run_evaluator
mAP@0.5IOU= 0.40562803653484647
PerformanceByCategory/AP@0.5IOU/handshake= 0.45454545454545453
PerformanceByCategory/AP@0.5IOU/point= 0.391812865497076
PerformanceByCategory/AP@0.5IOU/hug= 0.6896551724137931
PerformanceByCategory/AP@0.5IOU/push= 0.37356321839080453
PerformanceByCategory/AP@0.5IOU/kick= 0.0
PerformanceByCategory/AP@0.5IOU/punch= 0.0
2021-11-04 11:26:57,318 - mmaction - INFO -
mAP@0.5IOU 0.4056
2021-11-04 11:26:57,318 - mmaction - INFO -
Evaluateing data/Interaction/annotations/test/seq15.json with 607 images now
2021-11-04 11:26:57,318 - mmaction - INFO - Evaluating mAP ...
==> 0.0335379 seconds to process groundtruth results
==> 0.0631692 seconds to process prediction results
==> 0.10759 seconds to Convert groundtruth
==> 0.37948 seconds to convert prediction
==> 0.0157986 seconds to run_evaluator
mAP@0.5IOU= 0.5331220241603439
PerformanceByCategory/AP@0.5IOU/handshake= 0.8571428571428571
PerformanceByCategory/AP@0.5IOU/point= 0.25
PerformanceByCategory/AP@0.5IOU/hug= 0.7222222222222222
PerformanceByCategory/AP@0.5IOU/push= 0.452991452991453
PerformanceByCategory/AP@0.5IOU/kick= 0.1
PerformanceByCategory/AP@0.5IOU/punch= 0.38461538461538464
2021-11-04 11:26:57,921 - mmaction - INFO -
mAP@0.5IOU 0.5331
2021-11-04 11:26:57,921 - mmaction - INFO -
Evaluateing data/Interaction/annotations/test/seq20.json with 622 images now
2021-11-04 11:26:57,921 - mmaction - INFO - Evaluating mAP ...
==> 0.0534511 seconds to process groundtruth results
==> 0.085907 seconds to process prediction results
==> 0.128184 seconds to Convert groundtruth
==> 0.38158 seconds to convert prediction
==> 0.0196507 seconds to run_evaluator
mAP@0.5IOU= 0.49892216373873616
PerformanceByCategory/AP@0.5IOU/handshake= 0.5131485429992891
PerformanceByCategory/AP@0.5IOU/point= 0.5477982978485432
PerformanceByCategory/AP@0.5IOU/hug= 0.8906976744186047
PerformanceByCategory/AP@0.5IOU/push= 0.42094630515683146
PerformanceByCategory/AP@0.5IOU/kick= 0.0
PerformanceByCategory/AP@0.5IOU/punch= 0.17647058823529413
2021-11-04 11:26:58,594 - mmaction - INFO -
mAP@0.5IOU 0.4989
2021-11-04 11:26:58,599 - mmaction - INFO - Epoch(val) [20][2643] 0_mAP@0.5IOU: 0.8223, 1_mAP@root@61826ea1b4e40269dc480687:/home/JN-OpenLib-mmaction2# , all_mAP@0.5IOU: 0.5650
可以看出原模型最后準確率:56.50%
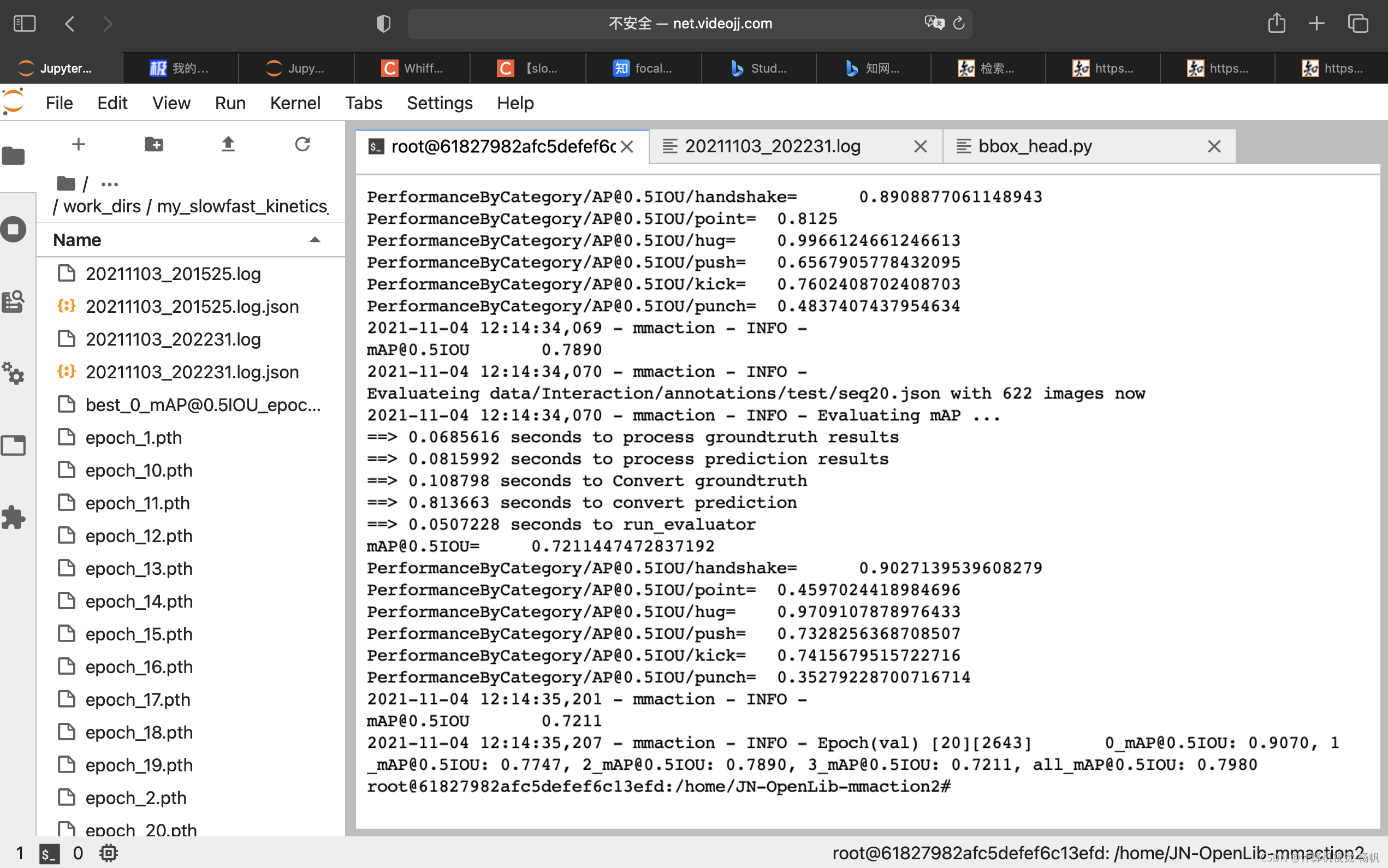
然后是改進后的模型
Evaluateing data/Interaction/annotations/test/seq5.json with 556 images now
2021-11-04 12:14:31,246 - mmaction - INFO - Evaluating mAP ...
==> 0.0391157 seconds to process groundtruth results
==> 0.0535824 seconds to process prediction results
==> 0.127968 seconds to Convert groundtruth
==> 0.653159 seconds to convert prediction
==> 0.0301211 seconds to run_evaluator
mAP@0.5IOU= 0.9069741460566432
PerformanceByCategory/AP@0.5IOU/handshake= 0.9942538308459411
PerformanceByCategory/AP@0.5IOU/point= 0.6242095754290875
PerformanceByCategory/AP@0.5IOU/hug= 0.9607235142118863
PerformanceByCategory/AP@0.5IOU/push= 1.0
PerformanceByCategory/AP@0.5IOU/kick= 0.9636363636363636
PerformanceByCategory/AP@0.5IOU/punch= 0.9395604395604397
2021-11-04 12:14:32,155 - mmaction - INFO -
mAP@0.5IOU 0.9070
2021-11-04 12:14:32,155 - mmaction - INFO -
Evaluateing data/Interaction/annotations/test/seq10.json with 557 images now
2021-11-04 12:14:32,156 - mmaction - INFO - Evaluating mAP ...
==> 0.0397999 seconds to process groundtruth results
==> 0.0588491 seconds to process prediction results
==> 0.0968714 seconds to Convert groundtruth
==> 0.665299 seconds to convert prediction
==> 0.0389373 seconds to run_evaluator
mAP@0.5IOU= 0.7747222320890791
PerformanceByCategory/AP@0.5IOU/handshake= 0.9065866429798629
PerformanceByCategory/AP@0.5IOU/point= 0.8147161450436735
PerformanceByCategory/AP@0.5IOU/hug= 0.9150861013434618
PerformanceByCategory/AP@0.5IOU/push= 0.9839296652614131
PerformanceByCategory/AP@0.5IOU/kick= 0.5192805038670355
PerformanceByCategory/AP@0.5IOU/punch= 0.43140462721305534
2021-11-04 12:14:33,073 - mmaction - INFO -
mAP@0.5IOU 0.7747
2021-11-04 12:14:33,073 - mmaction - INFO -
Evaluateing data/Interaction/annotations/test/seq15.json with 607 images now
2021-11-04 12:14:33,073 - mmaction - INFO - Evaluating mAP ...
==> 0.0371342 seconds to process groundtruth results
==> 0.0646772 seconds to process prediction results
==> 0.101891 seconds to Convert groundtruth
==> 0.739635 seconds to convert prediction
==> 0.0439842 seconds to run_evaluator
mAP@0.5IOU= 0.7889970077502289
PerformanceByCategory/AP@0.5IOU/handshake= 0.8908877061148943
PerformanceByCategory/AP@0.5IOU/point= 0.8125
PerformanceByCategory/AP@0.5IOU/hug= 0.9966124661246613
PerformanceByCategory/AP@0.5IOU/push= 0.6567905778432095
PerformanceByCategory/AP@0.5IOU/kick= 0.7602408702408703
PerformanceByCategory/AP@0.5IOU/punch= 0.4837407437954634
2021-11-04 12:14:34,069 - mmaction - INFO -
mAP@0.5IOU 0.7890
2021-11-04 12:14:34,070 - mmaction - INFO -
Evaluateing data/Interaction/annotations/test/seq20.json with 622 images now
2021-11-04 12:14:34,070 - mmaction - INFO - Evaluating mAP ...
==> 0.0685616 seconds to process groundtruth results
==> 0.0815992 seconds to process prediction results
==> 0.108798 seconds to Convert groundtruth
==> 0.813663 seconds to convert prediction
==> 0.0507228 seconds to run_evaluator
mAP@0.5IOU= 0.7211447472837192
PerformanceByCategory/AP@0.5IOU/handshake= 0.9027139539608279
PerformanceByCategory/AP@0.5IOU/point= 0.4597024418984696
PerformanceByCategory/AP@0.5IOU/hug= 0.9709107878976433
PerformanceByCategory/AP@0.5IOU/push= 0.7328256368708507
PerformanceByCategory/AP@0.5IOU/kick= 0.7415679515722716
PerformanceByCategory/AP@0.5IOU/punch= 0.35279228700716714
2021-11-04 12:14:35,201 - mmaction - INFO -
mAP@0.5IOU 0.7211
2021-11-04 12:14:35,207 - mmaction - INFO - Epoch(val) [20][2643] 0_mAP@0.5IOU: 0.9070, 1_mAP@0.5IOU: 0.7747, 2_mAP@0.5IOU: 0.7890, 3_mAP@0.5IOU: 0.7211, all_mAP@0.5IOU: 0.7980
可以看出原模型最后準確率:79.80%
可以看出這是明顯的提高
4.6 實時查看GPU使用情況
參考:https://blog.csdn.net/u014261408/article/details/109853936
有人寫了個小工具gpustat把nvidia-smi封裝了起來,用起來很爽很方便,推薦給大家,
首先安裝:
pip install gpustat
然后使用:
gpustat -cp
輸出為:

注意-c選項為顯示行程名,-p選項為顯示行程PID,如果想要不間斷持續輸出,請使用:
gpustat -cp -i 1

轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/348547.html
標籤:AI