多重信號分類MUSIC演算法
1. MUSIC演算法原理
MUSIC演算法,叫做多信號分類演算法 (Multiple Signal Classification),是一種基于特征結構的高解析度DOA演算法,該演算法利用了信號子空間和噪聲子空間正交性的特點,構造噪聲空間然后通過譜峰搜索來檢測信號的波達方向,需要注意的是,該演算法有一個前提,即各個入射信號之間互不相關,這樣才能保證入射信號的協方差矩陣是滿秩的,
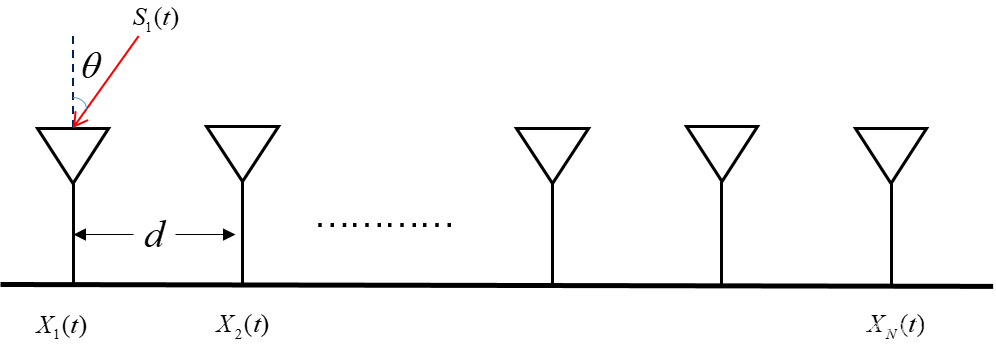
考慮以下這個線陣模型:
令
X
(
t
)
X(t)
X(t) 是在第
t
t
t 個快拍觀察到的資料向量,在陣列信號處理和空間譜估計中,
X
(
t
)
=
\boldsymbol{X}(t)=
X(t)=
[
X
1
(
t
)
,
X
2
(
t
)
,
?
?
,
X
N
(
t
)
]
T
\left[X_{1}(t), X_{2}(t), \cdots, X_{N}(t)\right]^{\mathrm{T}}
[X1?(t),X2?(t),?,XN?(t)]T 由
N
N
N 個陣元 (天線或傳感器) 的觀測資料組成,在時域譜估計中,向量
x
(
t
)
=
[
x
(
t
)
,
x
(
t
?
1
)
,
?
?
,
x
(
t
?
n
?
1
)
]
T
\boldsymbol{x}(t)=[x(t), x(t-1), \cdots, x(t-n-1)]^{\mathrm{T}}
x(t)=[x(t),x(t?1),?,x(t?n?1)]T 由連續的
n
n
n 個觀察資料樣本組成,
假定資料向量
X
(
t
)
\boldsymbol{X}(t)
X(t) 是
r
r
r 個窄帶信號入射到
N
N
N 個陣元組成的陣列的觀察資料向量或者是
r
r
r 個不相干的復諧波的疊加,即
X
(
t
)
=
∑
i
=
1
r
s
i
(
t
)
a
(
ω
i
)
+
v
(
t
)
=
A
s
(
t
)
+
n
(
t
)
\boldsymbol{X}(t)=\sum_{i=1}^{r} s_{i}(t) \boldsymbol{a}\left(\omega_{i}\right)+\boldsymbol{v}(t)=\boldsymbol{A} \boldsymbol{s}(t)+\boldsymbol{n}(t)
X(t)=i=1∑r?si?(t)a(ωi?)+v(t)=As(t)+n(t)式中,
A
=
[
a
(
ω
1
)
,
?
?
,
a
(
ω
r
)
]
\boldsymbol{A}=\left[\boldsymbol{a}\left(\omega_{1}\right), \cdots, \boldsymbol{a}\left(\omega_{r}\right)\right]
A=[a(ω1?),?,a(ωr?)] 為
N
×
r
N \times r
N×r 陣列流型矩陣,
a
(
ω
i
)
=
[
1
,
e
j
ω
i
,
…
,
e
j
(
N
?
1
)
ω
i
]
T
\boldsymbol{a}\left(\omega_{i}\right)=\left[1, \mathrm{e}^{\mathrm{j} \omega_{i}}, \ldots, \mathrm{e}^{\mathrm{j}(N-1) \omega_{i}}\right]^{\mathrm{T}}
a(ωi?)=[1,ejωi?,…,ej(N?1)ωi?]T 為方向向量;
s
(
t
)
=
[
s
1
(
t
)
,
?
?
,
s
r
(
t
)
]
T
\boldsymbol{s}(t)=\left[s_{1}(t), \cdots, s_{r}(t)\right]^{\mathrm{T}}
s(t)=[s1?(t),?,sr?(t)]T 為隨機信號向量,其均值為零向量,協方差矩陣為
R
s
=
E
{
s
(
t
)
s
H
(
t
)
}
;
\boldsymbol{R}_{\boldsymbol{s}}=\mathrm{E}\left\{\boldsymbol{s}(t) \boldsymbol{s}^{\mathrm{H}}(t)\right\} ;
Rs?=E{s(t)sH(t)}; 而
v
(
t
)
=
[
v
1
(
t
)
,
?
?
,
v
N
(
t
)
]
T
\boldsymbol{v}(t)=\left[v_{1}(t), \cdots, v_{N}(t)\right]^{\mathrm{T}}
v(t)=[v1?(t),?,vN?(t)]T 為加性噪聲向量,其各個分量為高斯白噪聲,它們具有零均值和相同的方差
σ
2
\sigma^{2}
σ2 ,在諧波恢復中,引數
ω
i
\omega_{i}
ωi? 為復諧波的頻率 ; 在陣列信號處理中,
ω
i
\omega_{i}
ωi? 是一空間引數
ω
i
=
2
π
d
λ
sin
?
θ
i
\omega_{i}=2 \pi \frac{d}{\lambda} \sin \theta_{i}
ωi?=2πλd?sinθi?式中,
d
d
d 為相鄰兩個陣元之間的距離 (假定陣元等間距排列成一直線),
λ
\lambda
λ 為波長, 且
θ
i
\theta_{i}
θi? 表 示第
i
i
i 個窄帶信號達到陣元的入射方向,簡稱波達方向,
MUSIC演算法要解決的是根據
N
N
N 個快拍的觀測資料向量
X
(
t
)
(
t
=
1
,
2
,
?
?
,
N
)
\boldsymbol{X}(t)(t=1,2, \cdots, N)
X(t)(t=1,2,?,N) 估計
r
r
r 個引數
ω
i
°
\omega_{i \circ}
ωi°? 這相當于對
r
r
r 個混合信號進行分類,簡稱多重信號分類,
假定噪聲向量
v
(
t
)
\boldsymbol{v}(t)
v(t) 與信號向量
s
(
t
)
\boldsymbol{s}(t)
s(t) 統計不相關,并令觀測資料向量的協方差矩陣
R
x
x
=
E
{
x
(
t
)
x
H
(
t
)
}
\boldsymbol{R}_{x x}=\mathrm{E}\left\{\boldsymbol{x}(t) \boldsymbol{x}^{\mathrm{H}}(t)\right\}
Rxx?=E{x(t)xH(t)} 的特征值分解為
R
x
x
=
A
R
s
s
A
H
+
σ
2
I
=
U
Σ
U
H
=
[
U
S
,
U
N
]
[
Σ
S
O
O
Σ
N
]
[
U
S
H
U
N
H
]
\boldsymbol{R}_{x x}=\boldsymbol{A R}_{s s} \boldsymbol{A}^{\mathrm{H}}+\sigma^{2} \boldsymbol{I}=\boldsymbol{U} \boldsymbol{\Sigma} \boldsymbol{U}^{\mathrm{H}}=[\boldsymbol{U_S}, \boldsymbol{U_N}]\left[\begin{array}{cc} \boldsymbol{\Sigma_S} & \boldsymbol{O} \\ \boldsymbol{O} & \boldsymbol{\Sigma_N} \end{array}\right]\left[\begin{array}{l} \boldsymbol{U}^{\mathrm{H}}_S \\ \boldsymbol{U}^{\mathrm{H}}_N \end{array}\right]
Rxx?=ARss?AH+σ2I=UΣUH=[US?,UN?][ΣS?O?OΣN??][USH?UNH??]式中,
R
s
s
=
E
{
s
(
t
)
s
H
(
t
)
}
,
\boldsymbol{R}_{s s}=\mathrm{E}\left\{\boldsymbol{s}(t) \boldsymbol{s}^{\mathrm{H}}(t)\right\},
Rss?=E{s(t)sH(t)}, 且
Σ
S
\boldsymbol{\Sigma_S}
ΣS? 包含了
r
r
r 個大特征值, 它們比
σ
2
\sigma^{2}
σ2 明顯大很多,
Σ
N
=
σ
2
I
n
?
r
\boldsymbol{\Sigma_N}=\sigma^{2} I_{n-r}
ΣN?=σ2In?r?,
因此有:
R
x
x
U
N
=
[
U
S
,
U
N
]
[
Σ
S
O
O
Σ
N
]
[
U
S
H
U
N
H
]
U
N
=
[
U
S
,
U
N
]
[
Σ
S
O
O
Σ
N
]
[
O
I
]
=
σ
2
U
N
\boldsymbol{R}_{x x} \boldsymbol{U_N}=[\boldsymbol{U_S}, \boldsymbol{U_N}]\left[\begin{array}{cc} \boldsymbol{\Sigma_S} & \boldsymbol{O} \\ \boldsymbol{O} & \boldsymbol{\Sigma_N} \end{array}\right]\left[\begin{array}{l} \boldsymbol{U}^{\mathrm{H}}_S \\ \boldsymbol{U}^{\mathrm{H}}_N \end{array}\right]\boldsymbol{U_N}=[\boldsymbol{U_S}, \boldsymbol{U_N}]\left[\begin{array}{cc}\boldsymbol{\Sigma_S} & \boldsymbol{O} \\ \boldsymbol{O} & \boldsymbol{\Sigma_N}\end{array}\right]\left[\begin{array}{l}\boldsymbol{O} \\ \boldsymbol{I}\end{array}\right]=\sigma^{2} \boldsymbol{U_N}
Rxx?UN?=[US?,UN?][ΣS?O?OΣN??][USH?UNH??]UN?=[US?,UN?][ΣS?O?OΣN??][OI?]=σ2UN?
又由
R
x
x
=
A
R
s
s
A
H
+
σ
2
I
\boldsymbol{R}_{x x}=\boldsymbol{A R}_{s s} \boldsymbol{A}^{\mathrm{H}}+\sigma^{2} \boldsymbol{I}
Rxx?=ARss?AH+σ2I 有
R
x
x
U
N
=
A
R
s
s
A
H
U
N
+
σ
2
U
N
,
\boldsymbol{R}_{x x} \boldsymbol{U_N}=\boldsymbol{A R}_{s s} \boldsymbol{A}^{\mathrm{H}} \boldsymbol{U_N}+\sigma^{2} \boldsymbol{U_N},
Rxx?UN?=ARss?AHUN?+σ2UN?,聯立上式可以得到
A
R
s
s
A
H
U
N
=
O
\boldsymbol{A R}_{s s} \boldsymbol{A}^{\mathrm{H}} \boldsymbol{U_N}=\boldsymbol{O}
ARss?AHUN?=O進而有
U
N
H
A
R
s
s
A
H
U
N
=
O
\boldsymbol{U}^{\mathrm{H}}_N \boldsymbol{A R}_{s s} \boldsymbol{A}^{\mathrm{H}} \boldsymbol{U_N}=\boldsymbol{O}
UNH?ARss?AHUN?=O
眾所周知,
Q
\boldsymbol{Q}
Q 非奇異時
t
H
Q
t
=
0
,
\boldsymbol{t}^{\mathrm{H}} \boldsymbol{Q} \boldsymbol{t}=0,
tHQt=0, 當且僅當
t
=
0
,
\boldsymbol{t}=\mathbf{0},
t=0, 故上式成立的充分必要條件是
A
H
U
N
=
O
\boldsymbol{A}^{\mathrm{H}} \boldsymbol{U_N}=\boldsymbol{O}
AHUN?=O因為
R
s
s
=
E
{
s
(
t
)
s
H
(
t
)
}
R_{s s}=\mathrm{E}\left\{s(t) s^{\mathrm{H}}(t)\right\}
Rss?=E{s(t)sH(t)} 非奇異,將
A
=
[
a
(
ω
1
)
,
?
?
,
a
(
ω
p
)
]
\boldsymbol{A}=\left[\boldsymbol{a}\left(\omega_{1}\right), \cdots, \boldsymbol{a}\left(\omega_{p}\right)\right]
A=[a(ω1?),?,a(ωp?)] 代入上式即有
a
H
(
ω
)
G
=
0
T
,
ω
=
ω
1
,
ω
2
,
?
?
,
ω
p
\boldsymbol{a}^{\mathrm{H}}(\omega) \boldsymbol{G}=\mathbf{0}^{\mathrm{T}}, \quad \omega=\omega_{1}, \omega_{2}, \cdots, \omega_{p}
aH(ω)G=0T,ω=ω1?,ω2?,?,ωp?顯然, 當
ω
≠
ω
1
,
ω
2
,
?
?
,
ω
p
\omega \neq \omega_{1}, \omega_{2}, \cdots, \omega_{p}
ω?=ω1?,ω2?,?,ωp? 時,
a
H
(
ω
)
G
≠
0
T
\boldsymbol{a}^{\mathrm{H}}(\omega) \boldsymbol{G} \neq \mathbf{0}^{\mathrm{T}}
aH(ω)G?=0T ,
將上式改寫成標量形式, 可以定義一種類似于功率譜的函式
P
(
ω
)
=
1
a
H
(
ω
)
U
N
U
N
H
a
(
ω
)
\boldsymbol P(\omega)=\frac{1}{\boldsymbol a^{\mathrm{H}}(\omega) \boldsymbol U_N \boldsymbol U^{\mathrm{H}}_N \boldsymbol a(\omega)}
P(ω)=aH(ω)UN?UNH?a(ω)1?由于噪聲的影響,
a
H
(
ω
)
U
N
U
N
H
a
(
ω
)
≠
0
\boldsymbol{a}^{\mathrm{H}}(\omega) \boldsymbol{U_N} \boldsymbol{U}^{\mathrm{H}}_N \boldsymbol{a}(\omega)\neq0
aH(ω)UN?UNH?a(ω)?=0,而是一個很小的數,因此此時的
P
(
ω
)
\boldsymbol P(\omega)
P(ω)是一個極大值,對上式取峰值的
r
r
r 個
ω
\omega
ω 值
ω
1
,
ω
2
,
?
?
,
ω
r
\omega_{1}, \omega_{2}, \cdots, \omega_{r}
ω1?,ω2?,?,ωr? 給出
r
r
r 個信號的波達方向
θ
1
,
θ
2
,
?
?
,
θ
r
\theta_{1}, \theta_{2}, \cdots, \theta_{r}
θ1?,θ2?,?,θr?,
同時在實際應用中,接收陣接收到的資料有限長,我們可以通過這些接收資料估計入射信號的協方差矩陣,達到極大似然估計的目的,假設有M個快拍snapshot,則有
R
^
x
x
=
1
M
∑
i
=
1
M
x
i
x
i
H
\hat{R}_{xx}=\frac{1}{M} \sum_{i=1}^{M} x_{i} x_{i}^{H}
R^xx?=M1?i=1∑M?xi?xiH?然后對協方差矩陣
R
^
x
x
\hat{R}_{xx}
R^xx?進行特征值分解:
R
^
x
x
=
U
Σ
U
H
\begin{aligned} \hat{R}_{xx} &={U} \Sigma{U}^{H} \end{aligned}
R^xx??=UΣUH?特征值分解后按照特征值的大小(從大到小)對特征向量進行重排,接下來就是要確定噪聲子空間,假設排序后的特征值
σ
1
2
?
σ
2
2
?
?
?
σ
r
2
?
σ
r
+
1
2
?
?
?
σ
N
2
\sigma_{1}^{2} \geqslant \sigma_{2}^{2} \geqslant \cdots \geqslant \sigma_{r}^{2} \geqslant \sigma_{r+1}^{2}\geqslant \cdots \geqslant \sigma_{N}^{2}
σ12??σ22????σr2??σr+12????σN2?,接收信號總能量定義為
P
=
σ
1
2
+
σ
2
2
+
?
+
σ
N
2
P=\sigma_{1}^{2}+\sigma_{2}^{2}+\cdots+\sigma_{N}^{2}
P=σ12?+σ22?+?+σN2?根據能量準則,如果J是滿足下式的最小整數:
σ
1
2
+
σ
2
2
+
?
+
σ
J
2
P
?
0.95
或
0.9
\frac{\sigma_{1}^{2}+\sigma_{2}^{2}+\cdots+\sigma_{J}^{2}}{P}\geqslant0.95或0.9
Pσ12?+σ22?+?+σJ2???0.95或0.9那么
{
σ
J
+
1
2
,
σ
J
+
2
2
?
?
,
σ
N
2
}
\{\sigma_{J+1}^{2},\sigma_{J+2}^{2}\cdots,\sigma_{N}^{2}\}
{σJ+12?,σJ+22??,σN2?}對應的特征向量組成的空間
U
N
^
\hat{U_N}
UN?^?即為噪聲子空間,
然后就可以用 P ( ω ) = 1 a H ( ω ) U ^ N U ^ N H a ( ω ) \boldsymbol P(\omega)=\frac{1}{\boldsymbol a^{\mathrm{H}}(\omega) \boldsymbol {\hat U_N} \boldsymbol {\hat U^{\mathrm{H}}_N} \boldsymbol a(\omega)} P(ω)=aH(ω)U^N?U^NH?a(ω)1?進行譜峰搜索,尋找r個入射信號的來波方向,
2. MATLAB仿真代碼
% Code For Music Algorithm
% Author:癢羊羊
% Date:2020/10/28
clc; clear all; close all;
%% -------------------------initialization-------------------------
f = 500; % frequency
c = 1500; % speed sound
lambda = c/f; % wavelength
d = lambda/2; % array element spacing
M = 10; % number of array elements
N = 100; % number of snapshot
K = 6; % number of sources
doa_phi = [-30, 0, 20, 40, 60, 75]; % direction of arrivals
%% generate signal
dd = (0:M-1)'*d; % distance between array elements and reference element
A = exp(-1i*2*pi*dd*sind(doa_phi)/lambda); % manifold array, M*K
S = sqrt(2)\(randn(K,N)+1i*randn(K,N)); % array of random signal, K*N
X = A*S; % received data without noise, M*N
X = awgn(X,10,'measured'); % received data with SNR 10dB
%% calculate the covariance matrix of received data and do eigenvalue decomposition
Rxx = X*X'/N; % covariance matrix
[U,V] = eig(Rxx); % eigenvalue decomposition
V = diag(V); % vectorize eigenvalue matrix
[V,idx] = sort(V,'descend'); % sort the eigenvalues in descending order
U = U(:,idx); % reset the eigenvector
P = sum(V); % power of received data
P_cum = cumsum(V); % cumsum of V
%% define the noise space
J = find(P_cum/P>=0.95); % or the coefficient is 0.9
J = J(1); % number of principal component
Un = U(:,J+1:end);
%% music for doa; seek the peek
theta = -90:0.1:90; % steer theta
doa_a = exp(-1i*2*pi*dd*sind(theta)/lambda); % manifold array for seeking peak
music = abs(diag(1./(doa_a'*(Un*Un')*doa_a))); % the result of each theta
music = 10*log10(music/max(music)); % normalize the result and convert it to dB
%% plot
figure;
plot(theta, music, 'linewidth', 2);
title('Music Algorithm For Doa', 'fontsize', 16);
xlabel('Theta(°)', 'fontsize', 16);
ylabel('Spatial Spectrum(dB)', 'fontsize', 16);
grid on;
運行結果:
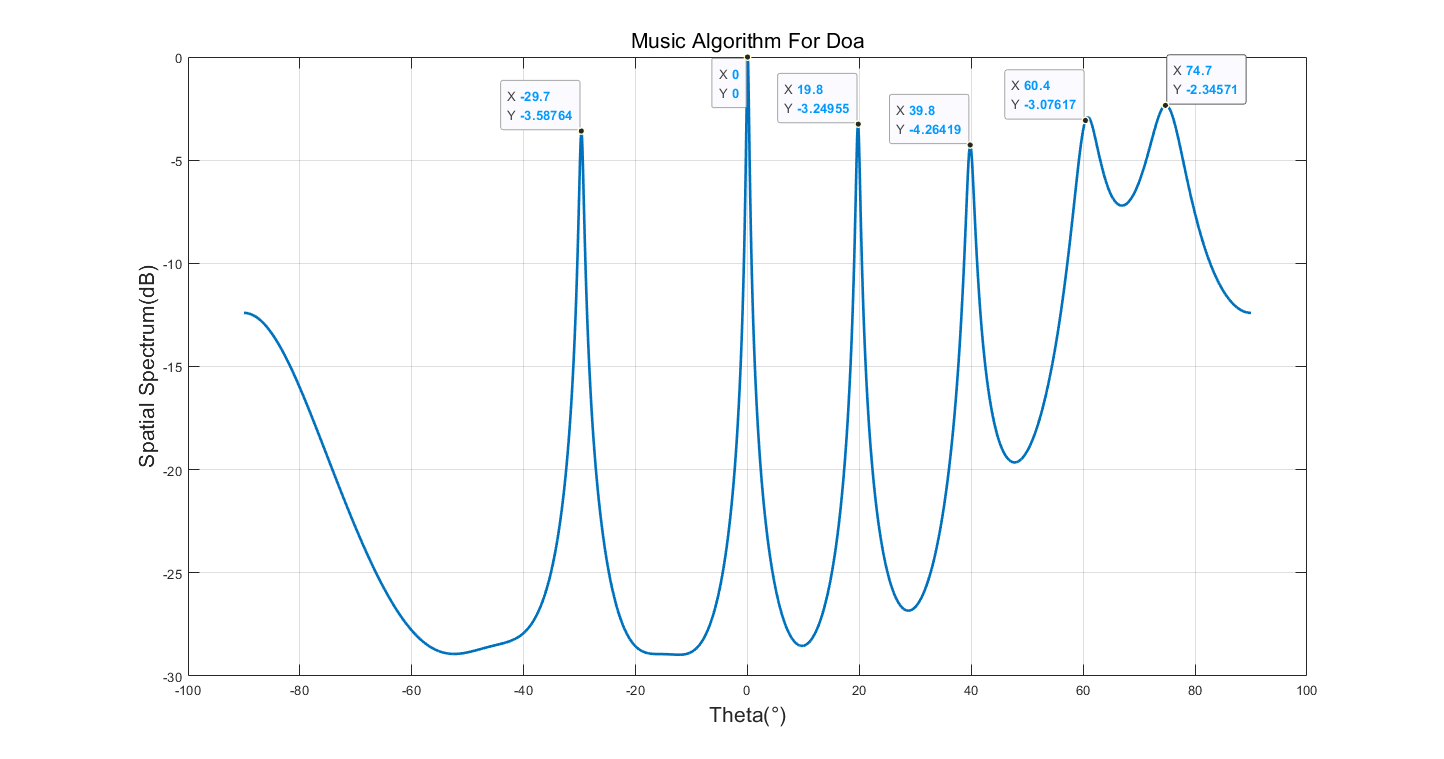
可以看到,入射信號互不相關時,傳統MUSIC演算法能夠以高解析度檢測出6個源的大致波達方向,分別是-29.7°,0°,19.8°,39.8°,60.4°,74.7°,但仍存在估計精度的問題,有很多改進的MUSIC演算法可以改善,
需要注意,陣元數目為M的半波長均勻線陣的自由度為DOF為M-1,表示該線陣最多可以分辨源的數目為M-1,同時若存在相干源,MUSIC演算法的效果就會不理想,基于相干源的MUSIC演算法會在后續文章詳寫,
部分MUSIC演算法原理參考張賢達先生的《矩陣分析與應用》,
歡迎轉載,表明出處,
轉載請註明出處,本文鏈接:https://www.uj5u.com/yidong/196445.html
標籤:其他
上一篇:Windows 版本的 Webrtc 的編譯 ( 基于聲網鏡像 )
下一篇:MATLAB計算信號的過零率