引言
本文借鑒自鄧平凡著《深入理解android卷I》第三章:【深入理解init】3.2.4小節:【屬性服務】,以及《深入講解Android Property機制》,僅供記錄學習使用,Android版本4.4 kitkak,
Android平臺的property service(屬性服務)機制,類似于windows中的注冊表,通常,系統或應用會將一些屬性以鍵值對的形式存盤在注冊表中,使得系統重啟或者應用重啟后,能夠根據之前注冊表中的設定進行初始化系統或應用,
1、Property初始化
property屬性的相關代碼可以在/system/core/init目錄下找到,首先是在init.c檔案的main函式中可以看到幾個和property相關的陳述句(省略了其他無關代碼):
// kitkak/system/core/init/init.c
int main(int argc, char **argv)
{
int property_set_fd_init = 0;
bool is_charger = false;
property_init();
is_charger = !strcmp(bootmode, "charger");
INFO("property init\n");
if (!is_charger)
property_load_boot_defaults();
…………
queue_builtin_action(property_service_init_action, "property_service_init");
/* run all property triggers based on current state of the properties */
queue_builtin_action(queue_property_triggers_action, "queue_property_triggers");
for(;;) {
int nr, i, timeout = -1;
execute_one_command();
restart_processes();
if (!property_set_fd_init && get_property_set_fd() > 0) {
ufds[fd_count].fd = get_property_set_fd();
ufds[fd_count].events = POLLIN;
ufds[fd_count].revents = 0;
fd_count++;
property_set_fd_init = 1;
}
…………
for (i = 0; i < fd_count; i++) {
if (ufds[i].revents == POLLIN) {
if (ufds[i].fd == get_property_set_fd())
handle_property_set_fd();
else if (ufds[i].fd == get_keychord_fd())
handle_keychord();
else if (ufds[i].fd == get_signal_fd())
handle_signal();
}
}
}
return 0;
}
首先來看property_init()函式:
// kitkat/system/core/init/property_service.c
void property_init(void)
{
init_property_area();
}// kitkat/system/core/init/property_service.c
static int init_property_area(void)
{
if (property_area_inited) //初始化部分:static int property_area_inited = 0;
return -1;
if(__system_property_area_init())
return -1;
if(init_workspace(&pa_workspace, 0))
return -1;
fcntl(pa_workspace.fd, F_SETFD, FD_CLOEXEC);
property_area_inited = 1;
return 0;
}__system_property_area_init()函式是bionic c庫中的函式,其位于:/bionic/libc/bionic/system_properties.c:
// kitkat/bionic/libc/bionic/system_properties.c
int __system_property_area_init()
{
return map_prop_area_rw();
}// kitkat/bionic/libc/bionic/system_properties.c
struct prop_area {
unsigned bytes_used;
unsigned volatile serial;
unsigned magic;
unsigned version;
unsigned reserved[28];
char data[0];
};
typedef struct prop_area prop_area;
…………
prop_area *__system_property_area__ = NULL;// kitkat\bionic\libc\include\sys\_system_properties.h
#define PROP_FILENAME "/dev/__properties__"
// kitkat\bionic/libc/bionic/system_properties.c
static char property_filename[PATH_MAX] = PROP_FILENAME;
// kitkat\bionic\libc\bionic\system_properties.c
static int map_prop_area_rw()
{
prop_area *pa;
int fd;
int ret;
/* dev is a tmpfs that we can use to carve a shared workspace
* out of, so let's do that...
*/
fd = open(property_filename, O_RDWR | O_CREAT | O_NOFOLLOW | O_CLOEXEC |
O_EXCL, 0444);
if (fd < 0) {
if (errno == EACCES) { //open函式所打開的檔案不符合所要求測驗的權限
/* for consistency with the case where the process has already
* mapped the page in and segfaults when trying to write to it
*/
abort();
}
return -1;
}
ret = fcntl(fd, F_SETFD, FD_CLOEXEC);
if (ret < 0)
goto out;
if (ftruncate(fd, PA_SIZE) < 0)
goto out;
pa_size = PA_SIZE;
pa_data_size = pa_size - sizeof(prop_area);
compat_mode = false;
pa = mmap(NULL, pa_size, PROT_READ | PROT_WRITE, MAP_SHARED, fd, 0);
if(pa == MAP_FAILED)
goto out;
memset(pa, 0, pa_size);
pa->magic = PROP_AREA_MAGIC;
pa->version = PROP_AREA_VERSION;
/* reserve root node */
pa->bytes_used = sizeof(prop_bt);
/* plug into the lib property services */
__system_property_area__ = pa;
close(fd);
return 0;
out:
close(fd);
return -1;
}__system_property_area_init()函式輾轉呼叫map_prop_area_rw()函式,可以看到其首先通過open函式在/dev目錄下打開了一個檔案:__properties__,open函式的第三個八進制引數0444表示該檔案的權限為:-r--r--r--,第二個引數意義如下:
- O_RDWR:讀寫打開;
- O_CREAT:若欲打開的檔案不存在則自動建立該檔案,使用該選項時,需要第三個引數mode,用來指定新檔案的訪問權限位(對應上面的0444);
- O_EXCL:如果O_CREAT 也被設定,此指令會去檢查檔案是否存在,檔案若不存在則建立該檔案,否則將導致打開檔案錯誤, 此外, 若O_CREAT 與O_EXCL 同時設定,并且欲打開的檔案為符號鏈接,則會打開檔案失敗;
- O_NOFOLLOW:如果引數pathname 所指的檔案為一符號連接,則會令打開檔案失敗;
- O_CLOEXEC:在行程執行exec系統呼叫時關閉此打開的檔案描述符(原子操作),防止父行程泄露打開的檔案給子行程,即便子行程沒有相應權限;
函式fcntl(fd, F_SETFD, FD_CLOEXEC)的作用是將檔案描述符close-on-exec標志設定為第三個引數的最后一位,而函式ftruncate(fd, PA_SIZE)會將引數fd指定的檔案大小改為引數PA_SIZE所指定的大小:
// kitkat\bionic\libc\include\sys\_system_properties.h
#define PA_SIZE (128 * 1024)接下來便是mmap函式,其主要功能是將檔案映射進記憶體,這里將檔案映射進記憶體,用于后續對__prooerties__檔案進行記憶體共享,該函式原型為:void* mmap(void* start, size_t length, int prot, int flags, int fd, off_t offset);
1、引數start:指向欲映射的記憶體起始地址,通常設為 NULL,代表讓系統自動選定地址,映射成功后回傳該地址;
2、引數length:代表將檔案中多大的部分映射到記憶體;
3、引數prot:映射區域的保護方式,可以為以下這種方式的組合:
- PROT_EXEC:映射區域可被執行;
- PROT_READ:映射區域可被讀取;
- PROT_WRITE:映射區域可被寫入;
- PROT_NONE:映射區域不能存取;
4、引數flags:影響映射區域的各種特性,在呼叫mmap()時必須要指定MAP_SHARED 或MAP_PRIVATE;
-
MAP_FIXED:如果引數start所指的地址無法成功建立映射時,則放棄映射,不對地址做修正,通常不鼓勵用此旗標;
-
MAP_SHARED:對映射區域的寫入資料會復制回檔案內,而且允許其他映射該檔案的行程共享;
-
MAP_PRIVATE:對映射區域的寫入操作會產生一個映射檔案的復制,即私人的“寫入時復制”(copy on write)對此區域作的任何修改都不會寫回原來的檔案內容;
-
MAP_ANONYMOUS:建立匿名映射,此時會忽略引數fd,不涉及檔案,而且映射區域無法和其他行程共享;
-
MAP_DENYWRITE:只允許對映射區域的寫入操作,其他對檔案直接寫入的操作將會被拒絕;
-
MAP_LOCKED:將映射區域鎖定住,這表示該區域不會被置換(swap);
5、引數fd:要映射到記憶體中的檔案描述符,如果使用匿名記憶體映射時,即flags中設定了MAP_ANONYMOUS,fd設為-1,有些系統不支持匿名記憶體映射,則可以使用fopen打開/dev/zero檔案,然后對該檔案進行映射,可以同樣達到匿名記憶體映射的效果,
6、引數offset:檔案映射的偏移量,通常設定為0,代表從檔案最前方開始對應,offset必須是分頁大小的整數倍,
7、回傳值:若映射成功則回傳映射區的記憶體起始地址,否則回傳MAP_FAILED(-1),錯誤原因存于errno 中,
8、錯誤代碼:
-
EBADF:引數fd 不是有效的檔案描述詞;
-
EACCES:存取權限有誤,如果是MAP_PRIVATE 情況下檔案必須可讀,使用MAP_SHARED則要有PROT_WRITE以及該檔案要能寫入;
-
EINVAL:引數start、length 或offset有一個不合法;
-
EAGAIN:檔案被鎖住,或是有太多記憶體被鎖住;
-
ENOMEM:記憶體不足;
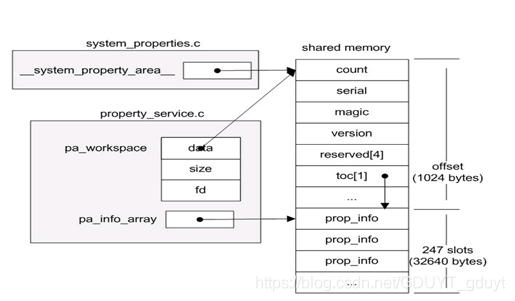
根據代碼中的mmap函式的呼叫情況:pa = mmap(NULL, pa_size, PROT_READ | PROT_WRITE, MAP_SHARED, fd, 0);可以看出其將__prooerties__檔案的PA_SIZE大小以共享的方式映射進記憶體,映射區域擁有讀寫權限,映射記憶體的起始地址賦值給區域prop_area型別指標pa,后續代碼通過對指標pa所指向的實體進行賦值,并將pa指標賦值給全域變__system_property_area__ ,然后關閉檔案句柄,這個全域變數__system_property_area__作為指向屬性檔案所映射的記憶體空間起始位置的指標,擔負著后續其他程式呼叫獲取和設定屬性的主要物件的責任,文章后續還能見到,這里的映射程序借用別人的圖片來展示一下這個程序:
init_property_area函式中呼叫的__system_property_area_init()函式功能就此結束,接下來看后續呼叫的init_workspace函式,
// kitkat/system/core/init/property_service.c
typedef struct {
size_t size;
int fd;
} workspace;
static int init_workspace(workspace *w, size_t size)
{
void *data;
int fd = open(PROP_FILENAME, O_RDONLY | O_NOFOLLOW);
if (fd < 0)
return -1;
w->size = size;
w->fd = fd;
return 0;
}
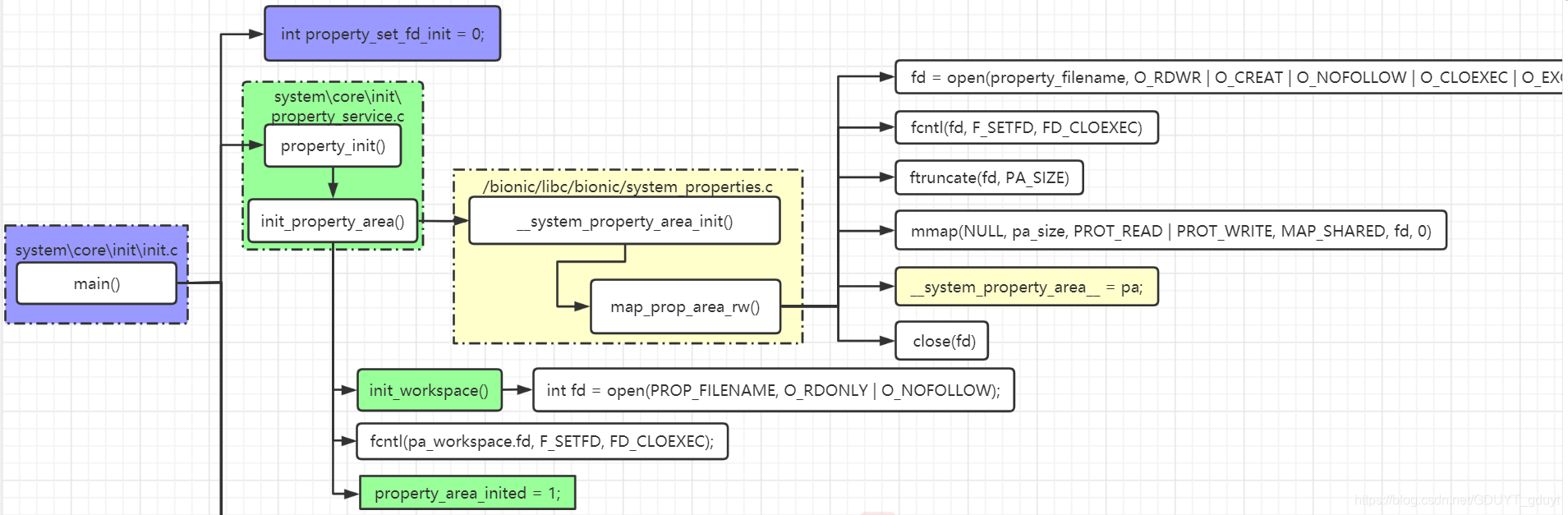
static workspace pa_workspace;根據函式呼叫init_workspace(&pa_workspace, 0)和函式定義可以看出,其以只讀的方式再次打開檔案"/dev/__properties__",這里把打開該檔案的句柄保存在靜態結構體實體pa_workspace的成員fd中,因為后續要用到,return之后回傳init_property_area函式,其后續將property_area_inited標志置為1,property_init函式結束,至此,函式property_init的呼叫鏈如下圖:
2、啟動Property
// kitkak/system/core/init/init.c
INFO("property init\n");
if (!is_charger)
property_load_boot_defaults();
…………
queue_builtin_action(property_service_init_action, "property_service_init");在init.c檔案的property_init函式之后,會看到上面的陳述句,這里的charger是關機充電下的系統模式,所以正常非關機充電情況下會執行property_load_boot_defaults()函式,該函式只有一個對/default.prop屬性檔案的加載陳述句 load_properties_from_file(PROP_PATH_RAMDISK_DEFAULT),后面會進行決議,而陳述句queue_builtin_action(property_service_init_action, "property_service_init")的作用就是把property_service_init_action函式處理為一個名為property_service_init的action(這個action同init行程啟動程序中,在init.rc檔案能看到的各種action相同),并將該action追加到init行程啟動程序中的action串列末尾,當順序執行或者觸發名為property_service_init的action時,就會執行property_service_init_action函式,該函式只有一個對start_property_service函式的呼叫陳述句,
// kitkat/system/core/init/property_service.c
void start_property_service(void)
{
int fd;
load_properties_from_file(PROP_PATH_SYSTEM_BUILD);
load_properties_from_file(PROP_PATH_SYSTEM_DEFAULT);
load_override_properties();
/* Read persistent properties after all default values have been loaded. */
load_persistent_properties();
fd = create_socket(PROP_SERVICE_NAME, SOCK_STREAM, 0666, 0, 0);
if(fd < 0) return;
fcntl(fd, F_SETFD, FD_CLOEXEC);
fcntl(fd, F_SETFL, O_NONBLOCK);
listen(fd, 8);
property_set_fd = fd;
}start_property_service函式首先按照順序加載幾個默認屬性檔案,這幾個屬性檔案的路徑定義位于kitkat\bionic\libc\include\sys\_system_properties.h:
/*
** Rules:
**
** - there is only one writer, but many readers
** - prop_area.count will never decrease in value
** - once allocated, a prop_info's name will not change
** - once allocated, a prop_info's offset will not change
** - reading a value requires the following steps
** 1. serial = pi->serial
** 2. if SERIAL_DIRTY(serial), wait*, then goto 1
** 3. memcpy(local, pi->value, SERIAL_VALUE_LEN(serial) + 1)
** 4. if pi->serial != serial, goto 2
**
** - writing a value requires the following steps
** 1. pi->serial = pi->serial | 1
** 2. memcpy(pi->value, local_value, value_len)
** 3. pi->serial = (value_len << 24) | ((pi->serial + 1) & 0xffffff)
*/
#define PROP_PATH_RAMDISK_DEFAULT "/default.prop"
#define PROP_PATH_SYSTEM_BUILD "/system/build.prop"
#define PROP_PATH_SYSTEM_DEFAULT "/system/default.prop"
#define PROP_PATH_LOCAL_OVERRIDE "/data/local.prop"
#define PROP_PATH_FACTORY "/factory/factory.prop"// kitkat/system/core/init/property_service.c
static void load_properties_from_file(const char *fn)
{
char *data;
unsigned sz;
data = read_file(fn, &sz);
if(data != 0) {
load_properties(data);
free(data);
}
}// kitkat/system/core/init/property_service.c
/* reads a file, making sure it is terminated with \n \0 */
void *read_file(const char *fn, unsigned *_sz)
{
char *data;
int sz;
int fd;
struct stat sb;
data = 0;
fd = open(fn, O_RDONLY);
if(fd < 0) return 0;
// for security reasons, disallow world-writable
// or group-writable files
if (fstat(fd, &sb) < 0) {
ERROR("fstat failed for '%s'\n", fn);
goto oops;
}
if ((sb.st_mode & (S_IWGRP | S_IWOTH)) != 0) {
ERROR("skipping insecure file '%s'\n", fn);
goto oops;
}
sz = lseek(fd, 0, SEEK_END);
if(sz < 0) goto oops;
if(lseek(fd, 0, SEEK_SET) != 0) goto oops;
data = (char*) malloc(sz + 2);
if(data == 0) goto oops;
if(read(fd, data, sz) != sz) goto oops;
close(fd);
data[sz] = '\n';
data[sz+1] = 0;
if(_sz) *_sz = sz;
return data;
oops:
close(fd);
if(data != 0) free(data);
return 0;
}read_file函式中的結構體 stat和fstat參考《struct stat 操作 小結》可以看出,首先以只讀方式打開屬性檔案并回傳該檔案句柄,因為后面的fstat函式需要一個已打開的檔案句柄作為實參,把該檔案的狀態和屬性賦值到stat結構體當中去,
關于lseek函式,函式宣告:off_t lseek(int fd, off_t offset, int whence);函式說明:每一個已打開的檔案都有一個讀寫位置,當打開檔案時通常其讀寫位置是指向檔案開頭,若是以附加的方式打開檔案(如O_APPEND),則讀寫位置會指向檔案尾,當read()或write()時,讀寫位置會隨之增加,所以lseek()的作用就是用來控制該檔案的讀寫位置,當呼叫成功時則回傳目前的讀寫位置,也就是距離檔案開頭多少個位元組,若有錯誤則回傳-1,關于引數whence:
- SEEK_SET:引數offset 即為新的讀寫位置;
- SEEK_CUR:以目前的讀寫位置往后增加offset 個位移量;
- SEEK_END:將讀寫位置指向檔案尾后再增加offset 個位移量;
- 當whence 值為SEEK_CUR 或SEEK_END 時, 引數offet 允許負值的出現;
常用方式:
- 欲將讀寫位置移到檔案開頭時:lseek(int fildes, 0, SEEK_SET)
- 欲將讀寫位置移到檔案尾時:lseek(int fildes, 0, SEEK_END)
- 想要取得目前檔案位置時:lseek(int fildes, 0, SEEK_CUR)
可以看出兩次執行lseek主要是為了檢測能否正常移動到檔案首部和尾部,而移動到尾部的時候回傳值sz即為該檔案大小,后面malloc申請了sz+2大小的空間,用于后面的read函式把檔案內容讀取出來,存盤到data所指向的記憶體空間中,并在末尾添加了'\n'和0,回傳指標data,
函式load_properties_from_file中,將屬性檔案內容讀取出來以后,便通過load_properties函式將屬性檔案中每行的key與value提取出來,執行property_set(key, value)將該屬性鍵值設定進屬性記憶體區域,property_set函式代碼如下:
// kitkat/system/core/init/property_service.c
int property_set(const char *name, const char *value)
{
prop_info *pi;
int ret;
size_t namelen = strlen(name);
size_t valuelen = strlen(value);
if (!is_legal_property_name(name, namelen)) return -1;
if (valuelen >= PROP_VALUE_MAX) return -1;
pi = (prop_info*) __system_property_find(name);
if(pi != 0) {
/* ro.* properties may NEVER be modified once set */
if(!strncmp(name, "ro.", 3)) return -1;
__system_property_update(pi, value, valuelen);
} else {
ret = __system_property_add(name, namelen, value, valuelen);
if (ret < 0) {
ERROR("Failed to set '%s'='%s'\n", name, value);
return ret;
}
}
/* If name starts with "net." treat as a DNS property. */
if (strncmp("net.", name, strlen("net.")) == 0) {
if (strcmp("net.change", name) == 0) {
return 0;
}
/*
* The 'net.change' property is a special property used track when any
* 'net.*' property name is updated. It is _ONLY_ updated here. Its value
* contains the last updated 'net.*' property.
*/
property_set("net.change", name);
} else if (persistent_properties_loaded &&
strncmp("persist.", name, strlen("persist.")) == 0) {
/*
* Don't write properties to disk until after we have read all default properties
* to prevent them from being overwritten by default values.
*/
write_persistent_property(name, value);
} else if (strcmp("selinux.reload_policy", name) == 0 &&
strcmp("1", value) == 0) {
selinux_reload_policy();
}
property_changed(name, value);
return 0;
}其首先通過is_legal_property_name()函式,判斷傳入的屬性名稱是否合法:
// kitkat/system/core/init/property_service.c
static bool is_legal_property_name(const char* name, size_t namelen)
{
size_t i;
bool previous_was_dot = false;
if (namelen >= PROP_NAME_MAX) return false;
if (namelen < 1) return false;
if (name[0] == '.') return false;
if (name[namelen - 1] == '.') return false;
/* Only allow alphanumeric, plus '.', '-', or '_' */
/* Don't allow ".." to appear in a property name */
for (i = 0; i < namelen; i++) {
if (name[i] == '.') {
if (previous_was_dot == true) return false;
previous_was_dot = true;
continue;
}
previous_was_dot = false;
if (name[i] == '_' || name[i] == '-') continue;
if (name[i] >= 'a' && name[i] <= 'z') continue;
if (name[i] >= 'A' && name[i] <= 'Z') continue;
if (name[i] >= '0' && name[i] <= '9') continue;
return false;
}
return true;
}可以看出對屬性名有著嚴格的限制,首先關于屬性的長度,在kitkat\bionic\libc\include\sys\system_properties.h中有定義:
#define PROP_NAME_MAX 42
#define PROP_VALUE_MAX 92即屬性名的長度不得超過42,不得小于1, 而屬性值的長度不得超過92,屬性名的第一個字符和最后一個都不得為點(.),也不得出現連續的點(..),屬性名的字符范圍限制在下劃線(_)、連接符(-)、點(.)、大小寫英文字母(A-Z和a-z)、數字0-9當中,
如果屬性名合法,便會執行__system_property_find()函式去尋找該屬性名是否已經存在,該函式定義在kitkat\bionic\libc\bionic\system_properties.c中,其最終呼叫該檔案中的find_property()函式在屬性字典樹結構中去查找該屬性名是否已經存在,這里呼叫find_property()的時候就是以前面提到的全域變數__system_property_area__為物件,在其所指向的記憶體空間中查找,
能在該樹形結構中找到的屬性,只要不是"ro."開頭的屬性,就直接呼叫system_properties.c檔案中的__system_property_update()函式對屬性值進行更新,對于一些特殊的屬性,property_set函式進行了特殊處理,"ro."開頭的屬性,因為在設定上只能初始話一次,所以不得更改;"net."開頭的屬性值發生更改后,必須也對"net.change"的屬性值發生更改,比如陳述句property_set("net.hostname", "xxxx")將屬性"net.hostname"的值設定為"xxxx",那么必然也會執行property_set("net.change", "net.hostname")將屬性"net.change"屬性的值改為"net.hostname",代表屬性"net.hostname"發生了更改;"persist."開頭的屬性則會在設備/data/property目錄下建立對應的檔案,該檔案以屬性名為檔案名,屬性值為檔案內容,
init行程的組態檔init.rc中存在一些依賴屬性值來觸發的action,所以property_set函式在更新或添加一個屬性值過后,需要通過property_changed()間接呼叫queue_property_triggers()函式,去查看這個屬性的更改會不會觸發哪些action,如果會觸發,則將這些action添加到action任務串列中,等待順序執行,至此,屬性檔案的加載動作結束,
函式start_property_service在加載完屬性檔案后,便通過陳述句fd = create_socket(PROP_SERVICE_NAME, SOCK_STREAM, 0666, 0, 0)來創建socket:
// kitkat/system/core/init/util.c
int create_socket(const char *name, int type, mode_t perm, uid_t uid, gid_t gid)
{
struct sockaddr_un addr;
int fd, ret;
char *secon;
fd = socket(PF_UNIX, type, 0);
if (fd < 0) {
ERROR("Failed to open socket '%s': %s\n", name, strerror(errno));
return -1;
}
memset(&addr, 0 , sizeof(addr));
addr.sun_family = AF_UNIX;
snprintf(addr.sun_path, sizeof(addr.sun_path), ANDROID_SOCKET_DIR"/%s",
name);
ret = unlink(addr.sun_path);
if (ret != 0 && errno != ENOENT) {
ERROR("Failed to unlink old socket '%s': %s\n", name, strerror(errno));
goto out_close;
}
secon = NULL;
if (sehandle) {
ret = selabel_lookup(sehandle, &secon, addr.sun_path, S_IFSOCK);
if (ret == 0)
setfscreatecon(secon);
}
ret = bind(fd, (struct sockaddr *) &addr, sizeof (addr));
if (ret) {
ERROR("Failed to bind socket '%s': %s\n", name, strerror(errno));
goto out_unlink;
}
setfscreatecon(NULL);
freecon(secon);
chown(addr.sun_path, uid, gid);
chmod(addr.sun_path, perm);
INFO("Created socket '%s' with mode '%o', user '%d', group '%d'\n",
addr.sun_path, perm, uid, gid);
return fd;
out_unlink:
unlink(addr.sun_path);
out_close:
close(fd);
return -1;
}首先出現的結構體型別sockaddr_un位于kitkat\bionic\libc\kernel\common\linux\un.h:
/****************************************************************************
****************************************************************************
***
*** This header was automatically generated from a Linux kernel header
*** of the same name, to make information necessary for userspace to
*** call into the kernel available to libc. It contains only constants,
*** structures, and macros generated from the original header, and thus,
*** contains no copyrightable information.
***
*** To edit the content of this header, modify the corresponding
*** source file (e.g. under external/kernel-headers/original/) then
*** run bionic/libc/kernel/tools/update_all.py
***
*** Any manual change here will be lost the next time this script will
*** be run. You've been warned!
***
****************************************************************************
****************************************************************************/
#ifndef _LINUX_UN_H
#define _LINUX_UN_H
#define UNIX_PATH_MAX 108
struct sockaddr_un {
/* WARNING: DO NOT EDIT, AUTO-GENERATED CODE - SEE TOP FOR INSTRUCTIONS */
sa_family_t sun_family;
char sun_path[UNIX_PATH_MAX];
};
#endif
/* WARNING: DO NOT EDIT, AUTO-GENERATED CODE - SEE TOP FOR INSTRUCTIONS */
根據注釋可以看到這個檔案是由腳本檔案自動生成的,所以根據注釋提示在kitkat\external\kernel-headers\original\linux\un.h可以找到原始定義:
#ifndef _LINUX_UN_H
#define _LINUX_UN_H
#define UNIX_PATH_MAX 108
struct sockaddr_un {
sa_family_t sun_family; /* AF_UNIX */
char sun_path[UNIX_PATH_MAX]; /* pathname */
};
#endif /* _LINUX_UN_H */
而samifily_t型別通過層層尋找也可以找到:
// kitkat\bionic\libc\include\sys\un.h
#include <sys/_types.h>
typedef __sa_family_t sa_family_t;
#include <linux/un.h>// Z:\amlogic-s905L\kitkat\bionic\libc\include\sys\_types.h
typedef __uint16_t __sa_family_t; /* sockaddr address family type */也就是是說,這個變數代表可以理解為socket的地址型別或協議族型別,這些不同協議型別的取值,系統已經定義了對應常量,可以在kitkat\bionic\libc\include\sys\socket.h中看到,內容比較多,就不羅列了,
回到create_socket函式,可以看到首先通過socket函式創建了行程通信協議型別(PF_UNIX)、雙向連續且可信賴的資料流(SOCK_STREAM )即TCP型別的socket,然后對sockaddr_un型別的實體成員addr進行賦值,之后unlink函式根據賦值的addr.sun_path洗掉舊的socket檔案,通過bind函式將創建的socket與指定的IP和埠系結起來,最后通過chmod()和chown()函式對該socket檔案賦予正確的所屬用戶和權限,其中addr.sun_path賦值為:ANDROID_SOCKET_DIR/PROP_SERVICE_NAME,這兩個常量定義如下:
// kitkat\system\core\include\cutils\sockets.h
#define ANDROID_SOCKET_DIR "/dev/socket"
// kitkat\bionic\libc\include\sys\_system_properties.h
#define PROP_SERVICE_NAME "property_service"至此,start_property_service函式中create_socket函式執行完畢,之后便通過陳述句listen(fd, 8)將該socket設定為listen模式,并將全域靜態變數property_set_fd設定為socket函式回傳值,該全域變數初始值為-1,而socket函式只有在出錯的情況下才會回傳-1,即正常情況下會回傳一個大于0的整形socket描述符,全域變數property_set_fd此處的賦值在后面會用到,
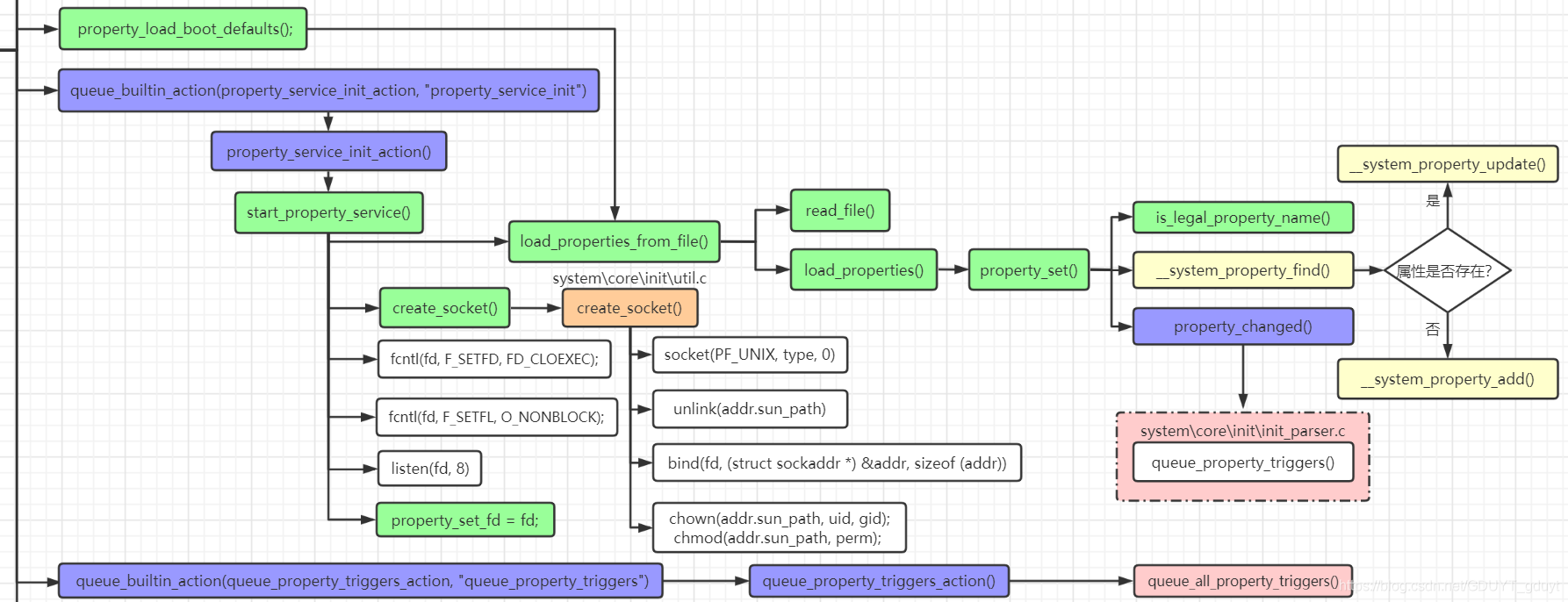
start_property_service函式執行結束,代表著init.c的main函式中 queue_builtin_action(property_service_init_action, "property_service_init")這個action執行結束,那么在main函式中繼續向下看,可以看到陳述句queue_builtin_action(queue_property_triggers_action, "queue_property_triggers"),這個也不難理解,因為至此屬性檔案均已加載完畢,那么init.rc檔案中那些將屬性值作為觸發器的到action,此時就可以檢測觸發了,至此,第二模塊的呼叫鏈如下圖:
3、持續監聽socket
init.c檔案中main函式,末尾有一個 是個死回圈for(;;),回圈內部關于property,會檢測property_set_fd的值是否大于0,如果大于0,則將執行handle_property_set_fd()函式,而這個值我們剛剛才說到其已經被賦值,所以來看看handle_property_set_fd()函式吧:
// kitkat/system/core/init/property_service.c
void handle_property_set_fd()
{
prop_msg msg;
int s;
int r;
int res;
struct ucred cr;
struct sockaddr_un addr;
socklen_t addr_size = sizeof(addr);
socklen_t cr_size = sizeof(cr);
char * source_ctx = NULL;
if ((s = accept(property_set_fd, (struct sockaddr *) &addr, &addr_size)) < 0) {
return;
}
/* Check socket options here */
if (getsockopt(s, SOL_SOCKET, SO_PEERCRED, &cr, &cr_size) < 0) {
close(s);
ERROR("Unable to receive socket options\n");
return;
}
r = TEMP_FAILURE_RETRY(recv(s, &msg, sizeof(msg), 0));
if(r != sizeof(prop_msg)) {
ERROR("sys_prop: mis-match msg size received: %d expected: %d errno: %d\n",
r, sizeof(prop_msg), errno);
close(s);
return;
}
switch(msg.cmd) {
case PROP_MSG_SETPROP:
msg.name[PROP_NAME_MAX-1] = 0;
msg.value[PROP_VALUE_MAX-1] = 0;
if (!is_legal_property_name(msg.name, strlen(msg.name))) {
ERROR("sys_prop: illegal property name. Got: \"%s\"\n", msg.name);
close(s);
return;
}
getpeercon(s, &source_ctx);
if(memcmp(msg.name,"ctl.",4) == 0) {
// Keep the old close-socket-early behavior when handling
// ctl.* properties.
close(s);
if (check_control_perms(msg.value, cr.uid, cr.gid, source_ctx)) {
handle_control_message((char*) msg.name + 4, (char*) msg.value);
} else {
ERROR("sys_prop: Unable to %s service ctl [%s] uid:%d gid:%d pid:%d\n",
msg.name + 4, msg.value, cr.uid, cr.gid, cr.pid);
}
} else {
if (check_perms(msg.name, cr.uid, cr.gid, source_ctx)) {
property_set((char*) msg.name, (char*) msg.value);
} else {
ERROR("sys_prop: permission denied uid:%d name:%s\n",
cr.uid, msg.name);
}
// Note: bionic's property client code assumes that the
// property server will not close the socket until *AFTER*
// the property is written to memory.
close(s);
}
freecon(source_ctx);
break;
default:
close(s);
break;
}
}之前通過socket()函式創建的服務端socket,在經過bind()和listen()之后,最終在這里通過accept()函式真正接收socket客戶端的連線,之后通過getsockopt()函式檢測socket相關狀態資訊,然后使用宏TEMP_FAILURE_RETRY忽略recv()函式中斷造成的錯誤,去接收socket客戶端發送來的訊息,其只對設定屬性的訊息(PROP_MSG_SETPROP)進行處理,
如果是"ctl."開頭的控制命令屬性(包括ctl.start、ctl.stop、ctl.restart),首先需要通過check_control_perms()函式檢測有沒有對該控制命令的執行權限:
// kitkat/system/core/init/property_service.c
/*
* White list of UID that are allowed to start/stop services.
* Currently there are no user apps that require.
*/
struct {
const char *service;
unsigned int uid;
unsigned int gid;
} control_perms[] = {
{ "dumpstate",AID_SHELL, AID_LOG },
{ "ril-daemon",AID_RADIO, AID_RADIO },
{NULL, 0, 0 }
};
static int check_control_perms(const char *name, unsigned int uid, unsigned int gid, char *sctx) {
int i;
if (uid == AID_SYSTEM || uid == AID_ROOT)
return check_control_mac_perms(name, sctx);
/* Search the ACL */
for (i = 0; control_perms[i].service; i++) {
if (strcmp(control_perms[i].service, name) == 0) {
if ((uid && control_perms[i].uid == uid) ||
(gid && control_perms[i].gid == gid)) {
return check_control_mac_perms(name, sctx);
}
}
}
return 0;
}可以看到system和root用戶是擁有該權限的,其他程式通過對比control_perms陣列中中的uid和gid,如果權限符合則也擁有執行該控制命令的權限,即會執行handle_control_message()函式去執行具體的命令,鑒于其呼叫鏈復雜,所以后面再細說說這個函式,
先看看非控制命令的屬性設定,其先通過check_perm()函式檢測相關權限,不過這次是和陣列property_perms中的uid和gid做對比,比如設定"net."開頭的屬性,則需要行程的uid為:AID_SYSTEM,如果擁有對該屬性的設定權限,則呼叫前面決議過的property_set()函式直接設定該屬性的值,property_perms陣列如下:
// kitkat/system/core/init/property_service.c
* White list of permissions for setting property services. */
struct {
const char *prefix;
unsigned int uid;
unsigned int gid;
} property_perms[] = {
{ "net.rmnet0.", AID_RADIO, 0 },
{ "net.gprs.", AID_RADIO, 0 },
{ "net.ppp", AID_RADIO, 0 },
{ "net.qmi", AID_RADIO, 0 },
{ "net.lte", AID_RADIO, 0 },
{ "net.cdma", AID_RADIO, 0 },
{ "ril.", AID_RADIO, 0 },
{ "gsm.", AID_RADIO, 0 },
{ "persist.radio", AID_RADIO, 0 },
{ "net.dns", AID_RADIO, 0 },
{ "sys.usb.config", AID_RADIO, 0 },
{ "net.", AID_SYSTEM, 0 },
{ "dev.", AID_SYSTEM, 0 },
{ "runtime.", AID_SYSTEM, 0 },
{ "hw.", AID_SYSTEM, 0 },
{ "sys.", AID_SYSTEM, 0 },
{ "sys.powerctl", AID_SHELL, 0 },
{ "service.", AID_SYSTEM, 0 },
{ "wlan.", AID_SYSTEM, 0 },
{ "bluetooth.", AID_BLUETOOTH, 0 },
{ "dhcp.", AID_SYSTEM, 0 },
{ "dhcp.", AID_DHCP, 0 },
{ "debug.", AID_SYSTEM, 0 },
{ "debug.", AID_SHELL, 0 },
{ "log.", AID_SHELL, 0 },
{ "service.adb.root", AID_SHELL, 0 },
{ "service.adb.tcp.port", AID_SHELL, 0 },
{ "persist.sys.", AID_SYSTEM, 0 },
{ "persist.service.", AID_SYSTEM, 0 },
{ "persist.security.", AID_SYSTEM, 0 },
{ "persist.service.bdroid.", AID_BLUETOOTH, 0 },
{ "selinux." , AID_SYSTEM, 0 },
{ NULL, 0, 0 }
};現在我們來看看前面遺留的handle_control_message()函式,其主要是做了程式調度的作業,后面看模塊結尾處呼叫鏈的圖更清晰一些,
用bootanim這個服務為例,設定("ctl.stop", "bootanim")這樣的指令,會先判斷這個服務是否在運行,如果在運行則會殺死bootanim這個行程,并將"init.svc.bootanim"屬性的值改為"stopping";如果這個服務沒在運行,則直接將"init.svc.bootanim"屬性的值改為"stopped",
指令("ctl.start", "bootanim")則是直接呼叫service_start()函式做一些處理(代碼有部分省略):
// kitkat/system/core/init/init.c
void service_start(struct service *svc, const char *dynamic_args)
{
…………
pid = fork();
if (pid == 0) {
struct socketinfo *si;
struct svcenvinfo *ei;
char tmp[32];
int fd, sz;
umask(077);
if (properties_inited()) {
get_property_workspace(&fd, &sz);
sprintf(tmp, "%d,%d", dup(fd), sz);
add_environment("ANDROID_PROPERTY_WORKSPACE", tmp);
}
for (ei = svc->envvars; ei; ei = ei->next)
add_environment(ei->name, ei->value);
setsockcreatecon(scon);
for (si = svc->sockets; si; si = si->next) {
int socket_type = (
!strcmp(si->type, "stream") ? SOCK_STREAM :
(!strcmp(si->type, "dgram") ? SOCK_DGRAM : SOCK_SEQPACKET));
int s = create_socket(si->name, socket_type,
si->perm, si->uid, si->gid);
if (s >= 0) {
publish_socket(si->name, s);
}
}
…………
if (!dynamic_args) {
if (execve(svc->args[0], (char**) svc->args, (char**) ENV) < 0) {
ERROR("cannot execve('%s'): %s\n", svc->args[0], strerror(errno));
}
} else {
char *arg_ptrs[INIT_PARSER_MAXARGS+1];
int arg_idx = svc->nargs;
char *tmp = strdup(dynamic_args);
char *next = tmp;
char *bword;
/* Copy the static arguments */
memcpy(arg_ptrs, svc->args, (svc->nargs * sizeof(char *)));
while((bword = strsep(&next, " "))) {
arg_ptrs[arg_idx++] = bword;
if (arg_idx == INIT_PARSER_MAXARGS)
break;
}
arg_ptrs[arg_idx] = '\0';
execve(svc->args[0], (char**) arg_ptrs, (char**) ENV);
}
_exit(127);
}
…………
if (properties_inited())
notify_service_state(svc->name, "running");
}
首先可以看到fork函式,學習《linux c語言 fork() 和 exec 函式的簡介和用法》這篇博文可以知道,其以init行程為父行程創建子行程,并通過umask()函式設定行程檔案的默認權限掩碼,該行程用于后續執行我們要啟動的服務,
在該行程中,首先通過properties_inited()函式獲取全域靜態變數property_area_inited的值,還記得在第一模塊的初始化部分,init_property_area()函式就已經將property_area_inited的值置為1,所以程式向下執行get_property_workspace(),這個函式則是獲取全域靜態變數pa_workspace的成員資訊,此刻,時間線再次收束,還記得第一模塊初始化部分init_property_area()函式中的陳述句:init_workspace(&pa_workspace, 0)就已經將"/dev/__properties__"這個檔案以只讀方式打開,并將檔案句柄傳給了pa_workspace的fd成員,所以接著執行后面的add_environment()函式將dup()過的檔案句柄添加到名為ANDROID_PROPERTY_WORKSPACE的環境變數中去,除了會添加服務自身的環境變數外,還會添加服務中這些socket的環境變數,以init.rc檔案中的netd服務為例:
service netd /system/bin/netd
class main
socket netd stream 0660 root system
socket dnsproxyd stream 0660 root inet
socket mdns stream 0660 root system之后的代碼設定了uid和gid等相關安全問題,此時一切準備就緒,程式根據啟動服務有沒有相關引數,通過execve()函式正式拉起執行目標服務,結束后陳述句_exit(127)退出子行程,以netd服務為例,將屬性"init.svc.netd"的值設定為"running",
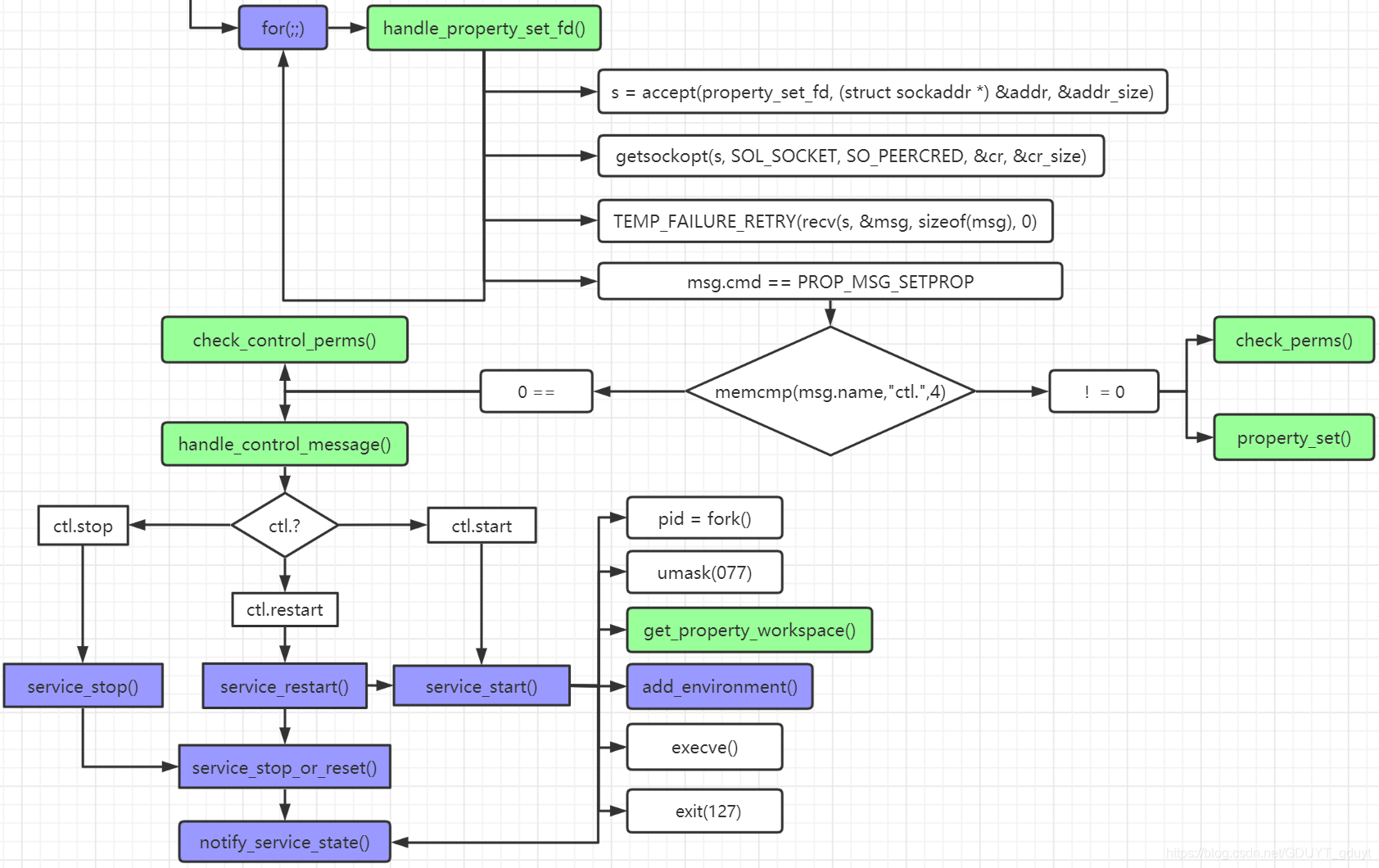
至此,service_start()函式結束,handle_control_message()函式結束,main函式的死回圈中一次handle_property_set_fd()函式呼叫結束,來看看第三模塊相關呼叫鏈:
4、外部呼叫
4.1 java層
java層對property屬性的呼叫介面位于:kitkat/frameworks/base/core/java/android/os/SystemProperties.java;其中的主要介面SystemProperties.get()和SystemProperties.set()都是通過jni介面native_get()和native_set()對C/C++層呼叫,
在kitkat\frameworks\base\core\jni\android_os_SystemProperties.cpp檔案中可以看到,這兩個介面最終都是指向了kitkat\system\core\libcutils\properties.c中,
這個c檔案中的property_get()、prooerty_set()函式相同的介面有三個,根據下面的注釋可以看到,這兩種是針對其他的呼叫方式的實作,所以不用管這兩種實作,主要來看第一種實作,
/*
* The Linux simulator provides a "system property server" that uses IPC
* to set/get/list properties. The file descriptor is shared by all
* threads in the process, so we use a mutex to ensure that requests
* from multiple threads don't get interleaved.
*/
…………
/* SUPER-cheesy place-holder implementation for Win32 */// kitkat\system\core\libcutils\properties.c
#include <sys/_system_properties.h>
int property_set(const char *key, const char *value)
{
if (!strcmp("persist.sys.autosleep", key) || !strcmp("persist.sys.autosleeptime", key)) {
__system_property_set("ctl.start", "auto_sleep");
}
return __system_property_set(key, value);
}
int property_get(const char *key, char *value, const char *default_value)
{
int len;
len = __system_property_get(key, value);
if(len > 0) {
return len;
}
if(default_value) {
len = strlen(default_value);
memcpy(value, default_value, len + 1);
}
return len;
}輾轉_system_properties.h和system_properties.h,最終又回到了kitkat\bionic\libc\bionic\system_properties.c中,對!就是在第一模塊初始化的時候所出現的那個檔案,在這個檔案可以找到__system_property_get()和__system_property_set()這兩個介面的實作,先來看看__system_property_set()函式:
// kitkat\bionic\libc\include\sys\_system_properties.h
struct prop_msg
{
unsigned cmd;
char name[PROP_NAME_MAX];
char value[PROP_VALUE_MAX];
};
// kitkat\bionic\libc\bionic\system_properties.c
int __system_property_set(const char *key, const char *value)
{
int err;
prop_msg msg;
if(key == 0) return -1;
if(value == 0) value = "";
if(strlen(key) >= PROP_NAME_MAX) return -1;
if(strlen(value) >= PROP_VALUE_MAX) return -1;
memset(&msg, 0, sizeof msg);
msg.cmd = PROP_MSG_SETPROP;
strlcpy(msg.name, key, sizeof msg.name);
strlcpy(msg.value, value, sizeof msg.value);
err = send_prop_msg(&msg);
if(err < 0) {
return err;
}
return 0;
}其首先創建一個prop_msg型別的結構體實體msg,將需要設定的屬性名和屬性值賦值給msg的name和value成員,然后將PROP_MSG_SETPROP作為訊息命令賦值給cmd成員,還記得第三模塊socket服務端監聽并接收客戶端連接訊息的時候,其只對PROP_MSG_SETPROP這個訊息做回應,待發送訊息準備完畢,通過send_prop_msg()函式發送訊息,
// kitkat\bionic\libc\bionic\system_properties.c
static const char property_service_socket[] = "/dev/socket/" PROP_SERVICE_NAME;
static int send_prop_msg(prop_msg *msg)
{
struct pollfd pollfds[1];
struct sockaddr_un addr;
socklen_t alen;
size_t namelen;
int s;
int r;
int result = -1;
s = socket(AF_LOCAL, SOCK_STREAM, 0);
if(s < 0) {
return result;
}
memset(&addr, 0, sizeof(addr));
namelen = strlen(property_service_socket);
strlcpy(addr.sun_path, property_service_socket, sizeof addr.sun_path);
addr.sun_family = AF_LOCAL;
alen = namelen + offsetof(struct sockaddr_un, sun_path) + 1;
if(TEMP_FAILURE_RETRY(connect(s, (struct sockaddr *) &addr, alen)) < 0) {
close(s);
return result;
}
r = TEMP_FAILURE_RETRY(send(s, msg, sizeof(prop_msg), 0));
if(r == sizeof(prop_msg)) {
pollfds[0].fd = s;
pollfds[0].events = 0;
r = TEMP_FAILURE_RETRY(poll(pollfds, 1, 250 /* ms */));
if (r == 1 && (pollfds[0].revents & POLLHUP) != 0) {
result = 0;
} else {
result = 0;
}
}
close(s);
return result;
}第二模塊中創建socket的socket檔案路徑位于"/dev/socket/property_service",send_prop_msg()函式中首先創建socket,并將其做為客戶端通過connect()函式連接之前創建的socket服務端,連接成功之后,通過send()函式將修改屬性的PROP_MSG_SETPROP訊息發送給服務端,第三模塊說到socket服務端持續監聽并接受客戶端的訊息,就是我們這里發送的訊息了,
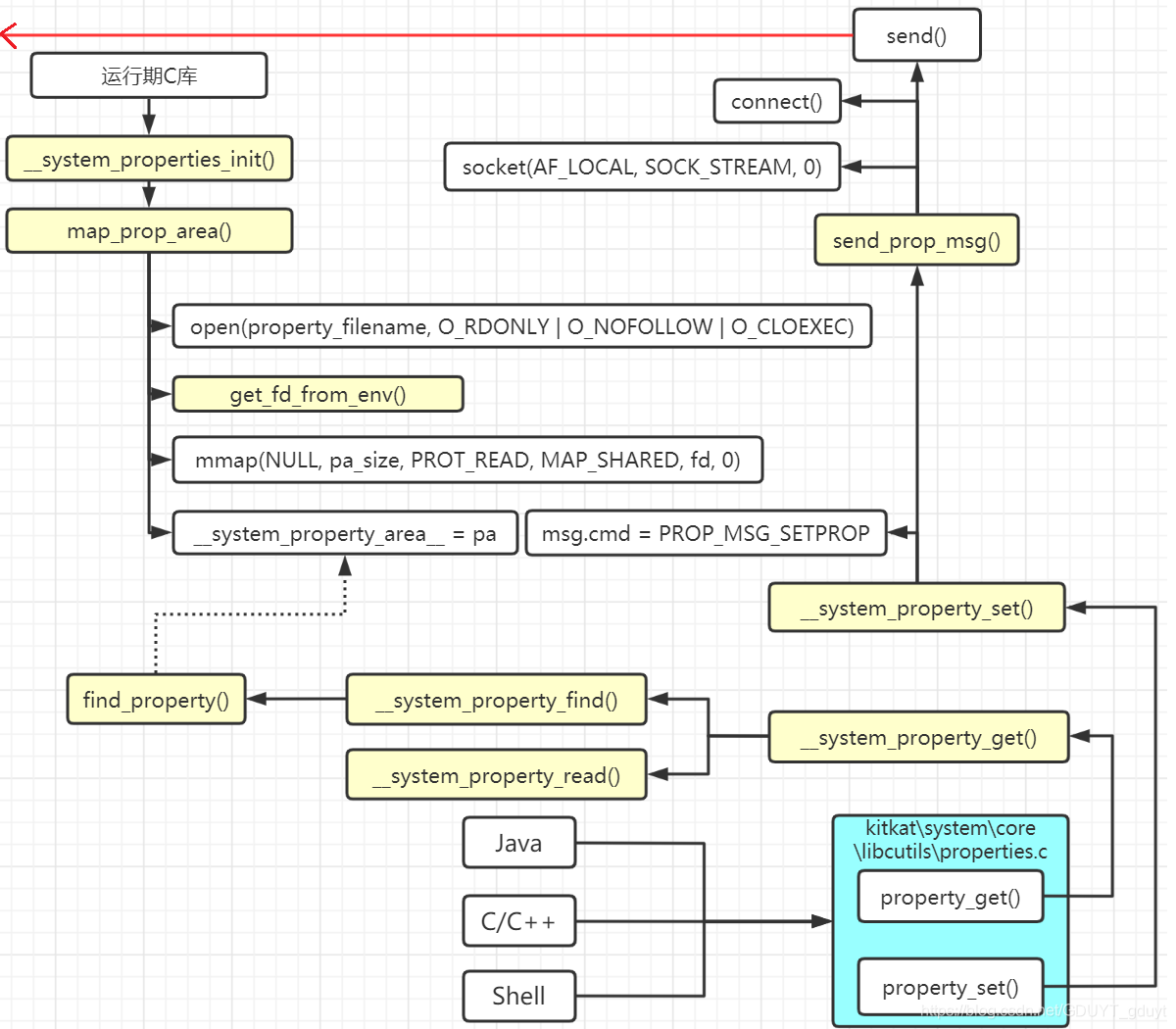
再來看看__system_property_get()函式:
// kitkat\bionic\libc\bionic\system_properties.c
int __system_property_get(const char *name, char *value)
{
const prop_info *pi = __system_property_find(name);
if(pi != 0) {
return __system_property_read(pi, 0, value);
} else {
value[0] = 0;
return 0;
}
}其先通過__system_property_find()函式輾轉呼叫之前出現過的find_property()函式,在屬性字典樹中尋找目標屬性,如果能找到該屬性,則通過__system_property_read()函式讀取該屬性的值,
這里有一個問題,那就是__system_property_set()函式是通過socket方式請求init行程,去對屬性記憶體空間進行設定,在第一模塊初始化的時候,init行程通過呼叫__system_property_area_init()函式獲取到了屬性記憶體檔案的讀寫權限,所以可以訪問屬性記憶體空間,但是__system_property_get()函式并未請求init行程,也沒有對屬性記憶體空間有讀寫權限,那它是如何獲取到屬性值的呢?原來是在該檔案里,有個和__system_property_area_init()類似的介面:__system_properties_init(),拿出來對比一下:
// kitkat\bionic\libc\bionic\system_properties.c
#################################
int __system_property_area_init()
{
return map_prop_area_rw();
}
#################################
int __system_properties_init()
{
return map_prop_area();
}
#################################
static int map_prop_area()
{
…………
fd = open(property_filename, O_RDONLY | O_NOFOLLOW | O_CLOEXEC);
if (fd >= 0) {
/* For old kernels that don't support O_CLOEXEC */
ret = fcntl(fd, F_SETFD, FD_CLOEXEC);
if (ret < 0)
goto cleanup;
}
if ((fd < 0) && (errno == ENOENT)) {
fd = get_fd_from_env();
fromFile = false;
}
…………
prop_area *pa = mmap(NULL, pa_size, PROT_READ, MAP_SHARED, fd, 0);
…………
__system_property_area__ = pa;
cleanup:
if (fromFile) {
close(fd);
}
return result;
}這里因為只是獲取屬性值,故以只讀方式打開屬性記憶體檔案,如果打開失敗,通過get_fd_from_env()函式的陳述句:getenv("ANDROID_PROPERTY_WORKSPACE")從環境變數中獲取該屬性檔案的檔案描述符,這個環境變數ANDROID_PROPERTY_WORKSPACE正是第三模塊service_start()函式中,陳述句add_environment("ANDROID_PROPERTY_WORKSPACE", tmp)所添加的,后續mmap()函式映射進記憶體的時候也是只讀方式,并將記憶體起始位置賦值給__system_property_area__ ,這個全域變數這里又一次出現了,__system_property_get()函式能找到目標屬性位置,就是以它為物件,在其所指向的記憶體空間中查找,
那么問題就剩下__system_properties_init()何時呼叫了,在文章開頭我所參考的文章《深入講解Android Property機制》中,已經有詳細說明,我還不太理解,就不細說了,大概意思就是在main函式運行前,加載C運行期庫初始化運行環境的時候就已經呼叫了,
4.2、C/C++層
以開機影片的程式為例,其就是直接呼叫kitkat\system\core\libcutils\properties.c的property_get()和property_set()介面,而這個檔案我們剛剛已經看過了,所以不再贅述,
// kitkak/frameworks/base/cmds/bootanimation/BootAnimation.cpp
#include <cutils/properties.h>4.3、shell層
通常我們通過adb連接到設備后,可以通過setprop設定某個屬性值,通過getprop獲取某個屬性值,或者所有屬性值,那么這里的原理是什么呢?首先可以在system/bin目錄下看到,setprop和getprop這兩個可執行檔案,且都是鏈接到toolbox這個檔案,那么我們來找一下toolbox的源代碼位置吧,
root@xxx:/ # ls -l /system/bin/setprop
lrwxr-xr-x root shell 2021-03-19 15:54 setprop -> toolbox
root@xxx:/ # ls -l /system/bin/getprop
lrwxr-xr-x root shell 2021-03-19 15:54 getprop -> toolbox在kitkak/system/core/toolbox目錄下可以找到這兩個程式的源檔案getprop.c和setprop.c:
// kitkak/system/core/toolbox/setprop.c
#include <stdio.h>
#include <cutils/properties.h>
int setprop_main(int argc, char *argv[])
{
if(argc != 3) {
fprintf(stderr,"usage: setprop <key> <value>\n");
return 1;
}
if(property_set(argv[1], argv[2])){
fprintf(stderr,"could not set property\n");
return 1;
}
return 0;
}
顯而易見,和java、c/c++層所呼叫的介面相同,都是指向了kitkat\system\core\libcutils\properties.c,
這一模塊的呼叫關系也用圖總結一下:
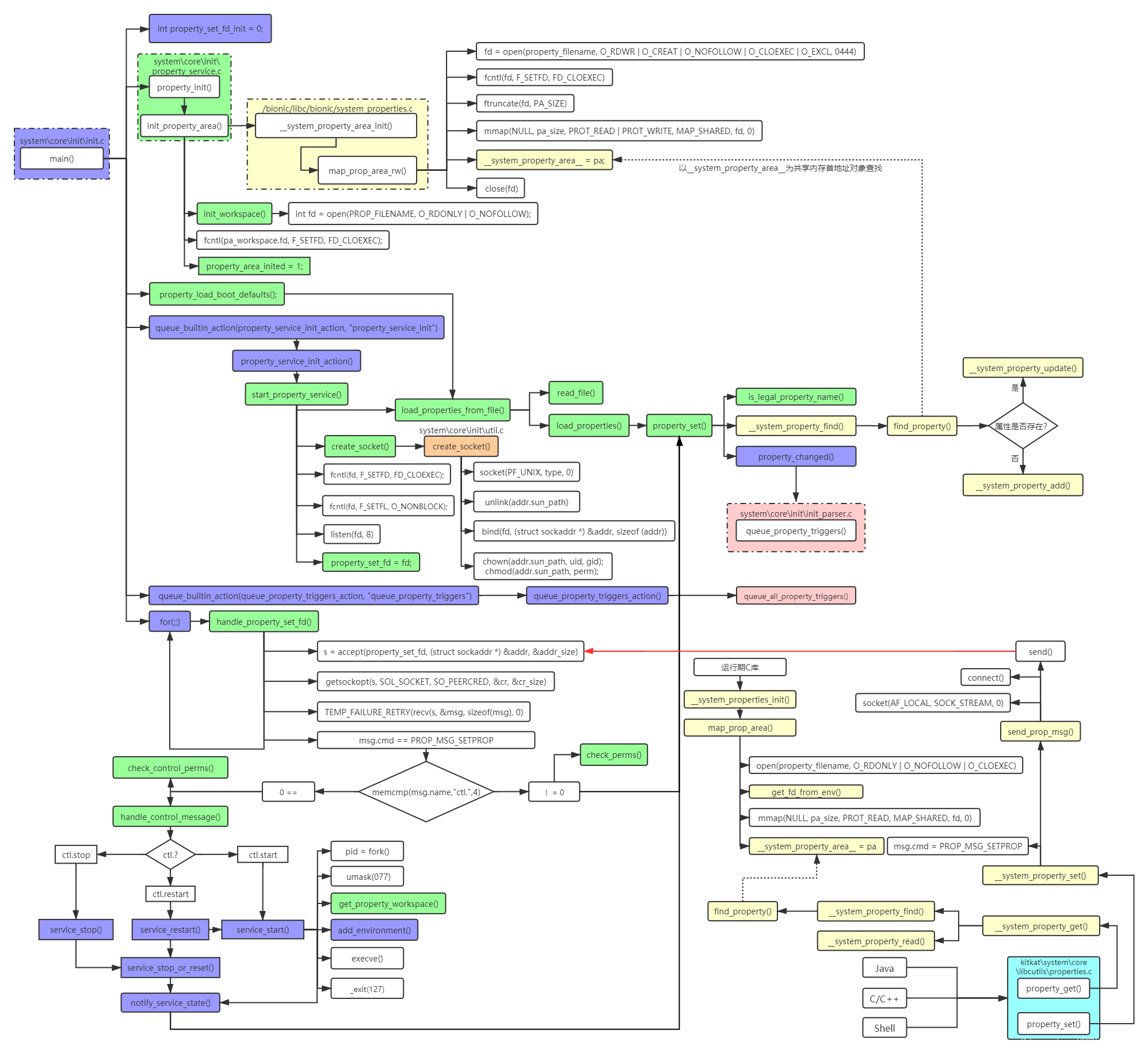
5、總結
先來看看總體的呼叫圖吧,如果覺得字太小可以去畫圖網站看原圖,可以縮放觀看,因為追蹤的是呼叫鏈細節,所以看起來有一代點復雜,但這能讓你看到程式運行的每一處細節,
如果覺得太深入代碼而忽略了整體的概要框架理解起來更清晰,那么我們借用《Android Property屬性的實作細節》,這篇文章的圖片來簡要概括一下,
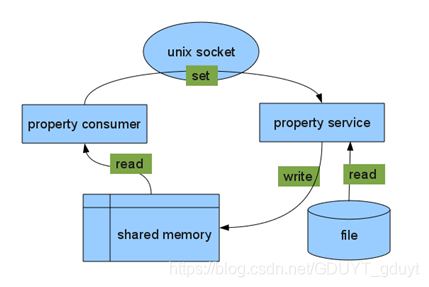
首先,開機啟動后property service服務從幾個prop屬性檔案中把屬性資料讀取出來,映射存盤到一塊共享記憶體中,這塊共享記憶體只提供讀權限給用戶行程,只有property service服務對屬性資料擁有寫權限,且只有init行程中呼叫了property service中寫屬性的介面,而init行程提供socket方式接收set屬性的訊息,所以用戶行程想要set屬性,就可以通過socket方式發送set屬性的訊息給init行程,init行程呼叫set屬性的介面,完成對屬性的寫入操作,
6、補充
博文到這里就結束了,首先很感謝各位前輩總結、分享的博文和技巧,由于自身太菜,這篇博文斷斷續續寫了兩周,創作不易,歡迎分享,但請不要隨意轉載呀,有需要的話可以私我,文章有錯誤的地方歡迎指正,我會在這里進行補充,
轉載請註明出處,本文鏈接:https://www.uj5u.com/yidong/272019.html
標籤:其他
上一篇:應用編程-行程信號處理