這幾天休假,因為新作業涉及到Android Camera系統的問題,本文就整理了在Android P上講解OpenCamera比較詳細的文章,結合Andriod P原始碼,以架構圖、UML順序圖、UML類圖和關鍵代碼走讀的方式,從App層、Framework層、Hal層詳細分析了OpenCamera的流程,如有分析的不對的地方,歡迎大家指正~
注意:Camera系統架構采用Camera2+Hal3,
參考博客:
Android Camera2+HAL3架構_既不是天才,便做那瘋子!-CSDN博客
[Android O] HAL3 之 Open Camera2 流程(零)—— 概覽_小石不識月,呼作白玉盤,-CSDN博客
Android P之Camera HAL3流程分析(0)_Vincentywj的博客-CSDN博客
AndroidO Treble架構(二):CameraProvider 及其守護行程_QGov的博客-CSDN博客
1 Camera2+Hal3整體架構
先看下Camera2+Hal3的整體架構:

圖1-1 Android Camera2+Hal3整體架構圖
上圖歸納的關鍵資訊是2個介面和3個層次,
2個介面是指aidl介面和hidl介面,aidl介面包含ICameraDeviceUser,ICameraDeviceCallbacks,ICameraService和ICameraServiceListener,其中ICameraDeviceCallbacks和ICameraServiceListener是回呼介面,hidl介面包含ICameraDeviceSession,ICameraDevice和ICameraProvider,
3個層次從上到下依次是app層,framework層和hal層,app層的行程是app(camera client)行程,framework層的行程是camera server行程,hal層的行程是hal(camera provider)行程,其中app(camera client)和camera server通信使用 AIDL(Android Interface Definition Language) ,camera server和hal(camera provider)行程通信使用HIDL(HAL interface definition language) ,
2 分層分析
本節按照如下順序進行詳細分析:
2.1 camera server行程和hal(camera provider)行程的啟動
2.2 app(camera client)行程<-->camera server行程
2.3 camera server行程<-->hal(camera provider)行程
2.4 camera hal分析
2.1 camera server行程和hal(camera provider)行程的啟動
我們知道app(camera client)行程是在用戶打開相機時啟動的,而camera server行程和hal(camera provider)行程是在Android系統開機時就準備好了,
下圖總結了一下camera server行程與hal(camera provider)行程啟動并初始化的關鍵邏輯:
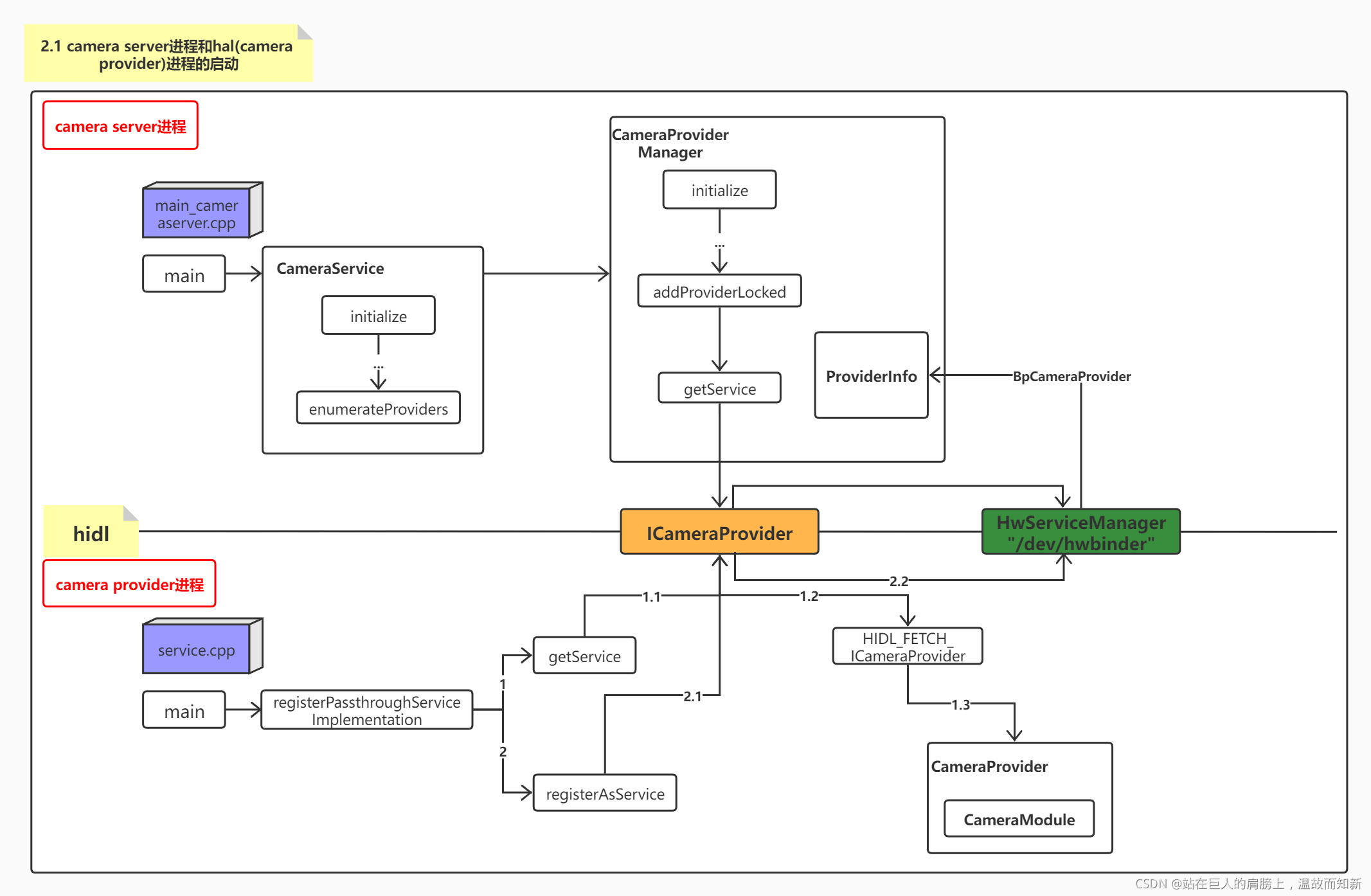
圖2-1-1 camera server行程與hal(camera provider)行程啟動架構圖
圖中兩點關鍵資訊:
1 hal(camera provider)行程啟動,實體化CameraProvider,并注冊服務到HwServiceManager;
實體化CameraProvider時會實體化CameraModule,CameraModule用來與Camera HAL進行互動,
2 camera server行程啟動,初始化,并從ICameraProvider和HwServiceManager中獲取camera provider服務;
CameraService類通過CameraProviderManager類來管理對CameraProvider的操作,
2.1.1 camera provider行程的啟動
camera provider行程的主要作業是注冊CameraProvider服務,以便camera server啟動時能找到它,下圖是camera provider行程的啟動UML順序圖,后面按照此圖分析關鍵代碼:
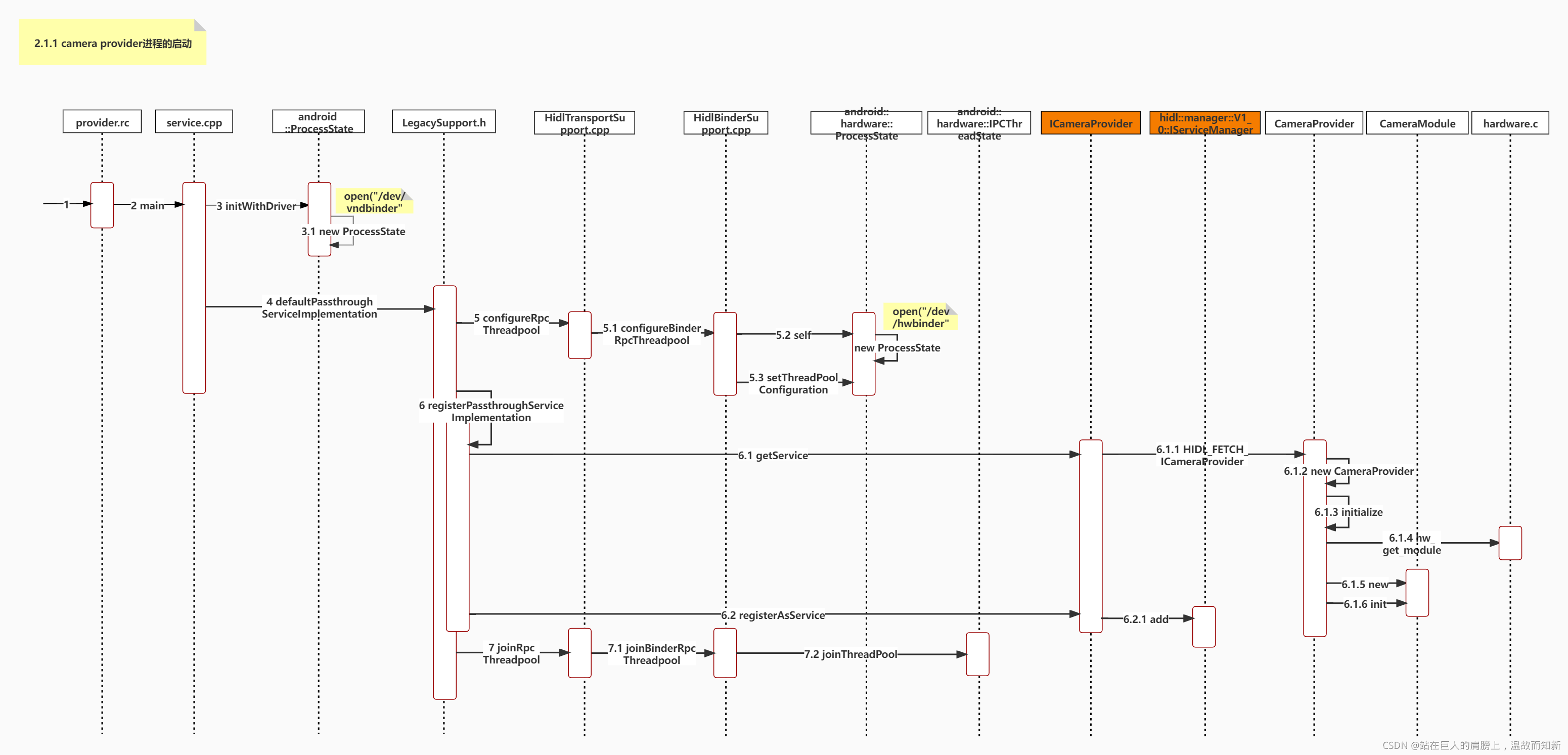
圖2-1-2 camera provider行程的啟動UML順序圖
Step1 provider.rc
啟動腳本
檔案:"hardware/interfaces/camera/provider/2.4/default/android.hardware.camera.provider@2.4-service_64.rc"
service vendor.camera-provider-2-4 /vendor/bin/hw/android.hardware.camera.provider@2.4-service_64
class hal
user cameraserver
group audio camera input drmrpc
ioprio rt 4
capabilities SYS_NICE
writepid /dev/cpuset/camera-daemon/tasks /dev/stune/top-app/taskscamera provider守護行程由init行程啟動,
Step2 main
檔案:"hardware/interfaces/camera/provider/2.4/default/service.cpp"
int main()
{
ALOGI("Camera provider Service is starting.");
// The camera HAL may communicate to other vendor components via
// /dev/vndbinder
// Step 3
android::ProcessState::initWithDriver("/dev/vndbinder");
// Step 4
return defaultPassthroughServiceImplementation<ICameraProvider>("legacy/0", /*maxThreads*/ 6);
}先與"/dev/vndbinder"進行某種關聯,表明Camera provider Service會通過它與其它 vendor 組件進行通信,然后創建默認為直通模式(passthrough)的 CameraProvider服務,
Step3 initWithDriver
檔案:"frameworks/native/libs/binder/ProcessState.cpp"
sp<ProcessState> ProcessState::initWithDriver(const char* driver)
{
Mutex::Autolock _l(gProcessMutex);
if (gProcess != NULL) {
// Allow for initWithDriver to be called repeatedly with the same
// driver.
if (!strcmp(gProcess->getDriverName().c_str(), driver)) {
return gProcess;
}
LOG_ALWAYS_FATAL("ProcessState was already initialized.");
}
if (access(driver, R_OK) == -1) {
ALOGE("Binder driver %s is unavailable. Using /dev/binder instead.", driver);
driver = "/dev/binder";
}
// 3.1
gProcess = new ProcessState(driver);
return gProcess;
}initWithDriver是ProcessState的static函式,這里以driver的名字("/dev/vndbinder")實體化android::ProcessState,
3.1 new ProcessState
檔案:"frameworks/native/libs/binder/ProcessState.cpp"
ProcessState::ProcessState(const char *driver)
: mDriverName(String8(driver))
, mDriverFD(open_driver(driver))
...
{
if (mDriverFD >= 0) {
// mmap the binder, providing a chunk of virtual address space to receive transactions.
mVMStart = mmap(0, BINDER_VM_SIZE, PROT_READ, MAP_PRIVATE | MAP_NORESERVE, mDriverFD, 0);
if (mVMStart == MAP_FAILED) {
// *sigh*
ALOGE("Using %s failed: unable to mmap transaction memory.\n", mDriverName.c_str());
close(mDriverFD);
mDriverFD = -1;
mDriverName.clear();
}
}
LOG_ALWAYS_FATAL_IF(mDriverFD < 0, "Binder driver could not be opened. Terminating.");
}實體化ProcessState時,主要作業是打開檔案"dev/vndbinder"并mmap映射記憶體,將內核虛擬記憶體空間映射到用戶空間,
注意,這里的ProcessState類的命名空間是andriod::ProcessState,
Step4 defaultPassthroughServiceImplementation
檔案:"system/libhidl/transport/include/hidl/LegacySupport.h"
/**
* Creates default passthrough service implementation. This method never returns.
*
* Return value is exit status.
*/
template<class Interface>
__attribute__((warn_unused_result))
status_t defaultPassthroughServiceImplementation(std::string name,
size_t maxThreads = 1) {
// Step 5
configureRpcThreadpool(maxThreads, true);
// Step 6
status_t result = registerPassthroughServiceImplementation<Interface>(name);
if (result != OK) {
return result;
}
// Step 7
joinRpcThreadpool();
return UNKNOWN_ERROR;
}注意:此時函式的命名空間是android::hardware::defaultPassthroughServiceImplementation,
配置RPC執行緒池并將Interface(ICameraProvider)以入參"legacy/0"為名注冊到相應的管理服務中,
Step5 configureRpcThreadpool
檔案:"system/libhidl/transport/HidlTransportSupport.cpp"
void configureRpcThreadpool(size_t maxThreads, bool callerWillJoin) {
// TODO(b/32756130) this should be transport-dependent
// 5.1
configureBinderRpcThreadpool(maxThreads, callerWillJoin);
}5.1 configureBinderRpcThreadpool
檔案:"system/libhidl/transport/HidlBinderSupport.cpp"
void configureBinderRpcThreadpool(size_t maxThreads, bool callerWillJoin) {
// 5.2, 5.3
ProcessState::self()->setThreadPoolConfiguration(maxThreads, callerWillJoin /*callerJoinsPool*/);
}注意,這里ProcessState類的命名空間是andriod::hardware::ProcessState,
5.2 ProcessState::self()
檔案:"system/libhwbinder/ProcessState.cpp"
ProcessState::self()這個函式最后會open("/dev/hwbinder"),
sp<ProcessState> ProcessState::self()
{
Mutex::Autolock _l(gProcessMutex);
if (gProcess != NULL) {
return gProcess;
}
gProcess = new ProcessState(DEFAULT_BINDER_VM_SIZE);
return gProcess;
}
ProcessState::ProcessState(size_t mmap_size)
: mDriverFD(open_driver())
, mVMStart(MAP_FAILED)
...
{
if (mDriverFD >= 0) {
// mmap the binder, providing a chunk of virtual address space to receive transactions.
mVMStart = mmap(0, mMmapSize, PROT_READ, MAP_PRIVATE | MAP_NORESERVE, mDriverFD, 0);
if (mVMStart == MAP_FAILED) {
// *sigh*
ALOGE("Using /dev/hwbinder failed: unable to mmap transaction memory.\n");
close(mDriverFD);
mDriverFD = -1;
}
}
else {
ALOGE("Binder driver could not be opened. Terminating.");
}
}
static int open_driver()
{
int fd = open("/dev/hwbinder", O_RDWR | O_CLOEXEC);
if (fd >= 0) {
int vers = 0;
status_t result = ioctl(fd, BINDER_VERSION, &vers);
if (result == -1) {
ALOGE("Binder ioctl to obtain version failed: %s", strerror(errno));
close(fd);
fd = -1;
}
...
} else {
ALOGW("Opening '/dev/hwbinder' failed: %s\n", strerror(errno));
}
return fd;
}5.3 setThreadPoolConfiguration
檔案:"system/libhwbinder/ProcessState.cpp"
status_t ProcessState::setThreadPoolConfiguration(size_t maxThreads, bool callerJoinsPool) {
LOG_ALWAYS_FATAL_IF(maxThreads < 1, "Binder threadpool must have a minimum of one thread.");
status_t result = NO_ERROR;
// the BINDER_SET_MAX_THREADS ioctl really tells the kernel how many threads
// it's allowed to spawn, *in addition* to any threads we may have already
// spawned locally. If 'callerJoinsPool' is true, it means that the caller
// will join the threadpool, and so the kernel needs to create one less thread.
// If 'callerJoinsPool' is false, we will still spawn a thread locally, and we should
// also tell the kernel to create one less thread than what was requested here.
size_t kernelMaxThreads = maxThreads - 1;
if (ioctl(mDriverFD, BINDER_SET_MAX_THREADS, &kernelMaxThreads) != -1) {
AutoMutex _l(mLock);
mMaxThreads = maxThreads;
mSpawnThreadOnStart = !callerJoinsPool;
} else {
result = -errno;
ALOGE("Binder ioctl to set max threads failed: %s", strerror(-result));
}
return result;
}這里的mDriverFD是指/dev/hwbinder,ioctl下發BINDER_SET_MAX_THREADS命令給"dev/hwbinder"的驅動,
Step6 registerPassthroughServiceImplementation
檔案:"system/libhidl/transport/include/hidl/LegacySupport.h"
/**
* Registers passthrough service implementation.
*/
template<class Interface>
__attribute__((warn_unused_result))
status_t registerPassthroughServiceImplementation(
std::string name = "default") {
// 6.1
sp<Interface> service = Interface::getService(name, true /* getStub */);
if (service == nullptr) {
ALOGE("Could not get passthrough implementation for %s/%s.",
Interface::descriptor, name.c_str());
return EXIT_FAILURE;
}
LOG_FATAL_IF(service->isRemote(), "Implementation of %s/%s is remote!",
Interface::descriptor, name.c_str());
// 6.2
status_t status = service->registerAsService(name);
if (status == OK) {
ALOGI("Registration complete for %s/%s.",
Interface::descriptor, name.c_str());
} else {
ALOGE("Could not register service %s/%s (%d).",
Interface::descriptor, name.c_str(), status);
}
return status;
}入參name為"legacy/0",模板類引數Interface為ICameraProvider,
這個函式做了兩件事:
1 實體化CameraProvider物件
2 注冊CameraProvider服務到HwServiceManager
getService()和registerAsService()是CameraProviderAll.cpp里的函式,CameraProviderAll.cpp是hidl機制通過ICameraProvider.hal編譯生成的,
ICameraProvider.hal:hardware/interfaces/camera/provider/2.4/ICameraProvider.hal
6.1 ICameraProvider::getService
當getStub=ture時,getService是以passthrough模式打開 HAL 實作,得到的是CameraProvider的實體化物件(BnHwCameraProvider),當getStub=false時,得到的是binder代理物件(BpHwCameraProvider),后面camera server行程會用到,
詳細分析請參考:
https://blog.csdn.net/wzoxylwzoxyl/article/details/82227506
最后會呼叫到HIDL_FETCH_ICameraProvider函式,
6.1.1 HIDL_FETCH_ICameraProvider
檔案:"./hardware/interfaces/camera/provider/2.4/default/CameraProvider.cpp"
ICameraProvider* HIDL_FETCH_ICameraProvider(const char* name) {
if (strcmp(name, kLegacyProviderName) == 0) {
// 6.1.2
CameraProvider* provider = new CameraProvider();
if (provider == nullptr) {
ALOGE("%s: cannot allocate camera provider!", __FUNCTION__);
return nullptr;
}
if (provider->isInitFailed()) {
ALOGE("%s: camera provider init failed!", __FUNCTION__);
delete provider;
return nullptr;
}
return provider;
} else if (strcmp(name, kExternalProviderName) == 0) {
ExternalCameraProvider* provider = new ExternalCameraProvider();
return provider;
}
ALOGE("%s: unknown instance name: %s", __FUNCTION__, name);
return nullptr;
}
CameraProvider::CameraProvider() :
camera_module_callbacks_t({sCameraDeviceStatusChange,
sTorchModeStatusChange}) {
// 6.1.3
mInitFailed = initialize();
}
bool CameraProvider::initialize() {
camera_module_t *rawModule;
// 6.1.4 "hardware/libhardware/hardware.c"
int err = hw_get_module(CAMERA_HARDWARE_MODULE_ID,
(const hw_module_t **)&rawModule);
if (err < 0) {
ALOGE("Could not load camera HAL module: %d (%s)", err, strerror(-err));
return true;
}
// 6.1.5 "hardware/interfaces/camera/common/1.0/default/CameraModule.cpp"
mModule = new CameraModule(rawModule);
// 6.1.6
err = mModule->init();
if (err != OK) {
ALOGE("Could not initialize camera HAL module: %d (%s)", err, strerror(-err));
mModule.clear();
return true;
}
ALOGI("Loaded \"%s\" camera module", mModule->getModuleName());
...
}6.1.2:創建一個 CameraProvider 實體
6.1.4:通過 hw_get_module 函式獲取到rawModule的實體(從相應的 Camera HAL 動態庫中加載得到,hw_get_module->hw_get_module_by_class->load->dlopen),rawModule是連接到 HAL 層的關鍵結構,通過它就可以呼叫到 HAL 中的一些函式,CAMERA_HARDWARE_MODULE_ID為字串"camera",
6.1.5:基于 rawModule 創建 CameraModule 實體并初始化,之后都是通過 mModule 來對 HAL 進行操作的,CameraModule 是對于 camera_module_t 的一層封裝,諸如 init、open 這樣的操作,實際上都是通過呼叫 camera_module_t 結構中函式指標來完成的,
6.2 registerAsService
檔案:out/.../CameraProviderAll.cpp
::android::status_t ICameraProvider::registerAsService(const std::string &serviceName) {
::android::hardware::details::onRegistration("android.hardware.camera.provider@2.4", "ICameraProvider", serviceName);
// 得到 BpHwServiceManager 物件,就是HwServiceManager物件的binder代理
const ::android::sp<::android::hidl::manager::V1_0::IServiceManager> sm
= ::android::hardware::defaultServiceManager();
// 呼叫 BpHwServiceManager::add() 注冊服務
// 6.2.1
::android::hardware::Return<bool> ret = sm->add(serviceName.c_str(), this);
return ret.isOk() && ret ? ::android::OK : ::android::UNKNOWN_ERROR;
}將CameraProvider注冊為一個服務,其他行程需要使用camera hal時通過binder得到CameraProvider代理類(BpHwCameraProvider)即可操作camera hal ,注意,是將CameraProvider服務注冊到HwServiceManager中,不是ServiceManager,
Step7 joinRpcThreadpool
檔案:"system/libhidl/transport/HidlTransportSupport.cpp"
void joinRpcThreadpool() {
// TODO(b/32756130) this should be transport-dependent
// 7.1
joinBinderRpcThreadpool();
}CameraProvider服務進入回圈,等待binder請求并處理,這里的joinRpcThreadpool()是把主執行緒也放入執行緒池中等待請求,防止這個行程退出,
7.1 joinBinderRpcThreadpool
檔案:"system/libhidl/transport/HidlBinderSupport.cpp"
void joinBinderRpcThreadpool() {
// 7.2
IPCThreadState::self()->joinThreadPool();
}7.2 joinThreadPool
檔案:"system/libhwbinder/IPCThreadState.cpp"
void IPCThreadState::joinThreadPool(bool isMain)
{
LOG_THREADPOOL("**** THREAD %p (PID %d) IS JOINING THE THREAD POOL\n", (void*)pthread_self(), getpid());
mOut.writeInt32(isMain ? BC_ENTER_LOOPER : BC_REGISTER_LOOPER);
status_t result;
// 回圈處理請求
do {
processPendingDerefs();
// now get the next command to be processed, waiting if necessary
result = getAndExecuteCommand();
if (result < NO_ERROR && result != TIMED_OUT && result != -ECONNREFUSED && result != -EBADF) {
ALOGE("getAndExecuteCommand(fd=%d) returned unexpected error %d, aborting",
mProcess->mDriverFD, result);
abort();
}
// Let this thread exit the thread pool if it is no longer
// needed and it is not the main process thread.
if(result == TIMED_OUT && !isMain) {
break;
}
} while (result != -ECONNREFUSED && result != -EBADF);
LOG_THREADPOOL("**** THREAD %p (PID %d) IS LEAVING THE THREAD POOL err=%d\n",
(void*)pthread_self(), getpid(), result);
// 如果走到這表明出現了一些錯誤,需要告訴驅動這個執行緒不再處理訊息了,即退出LOOPER
mOut.writeInt32(BC_EXIT_LOOPER);
talkWithDriver(false);
}getAndExecuteCommand()會處理command,必要時阻塞執行緒,
分析完camera provider行程的啟動,我們再來看camera server行程的啟動,
2.1.2 camera server行程的啟動
camera provider行程先啟動,然后camera server行程再啟動,camera server行程啟動后會去 "連接" CameraProvider服務,從HwServiceManager里獲取CameraProvider服務,
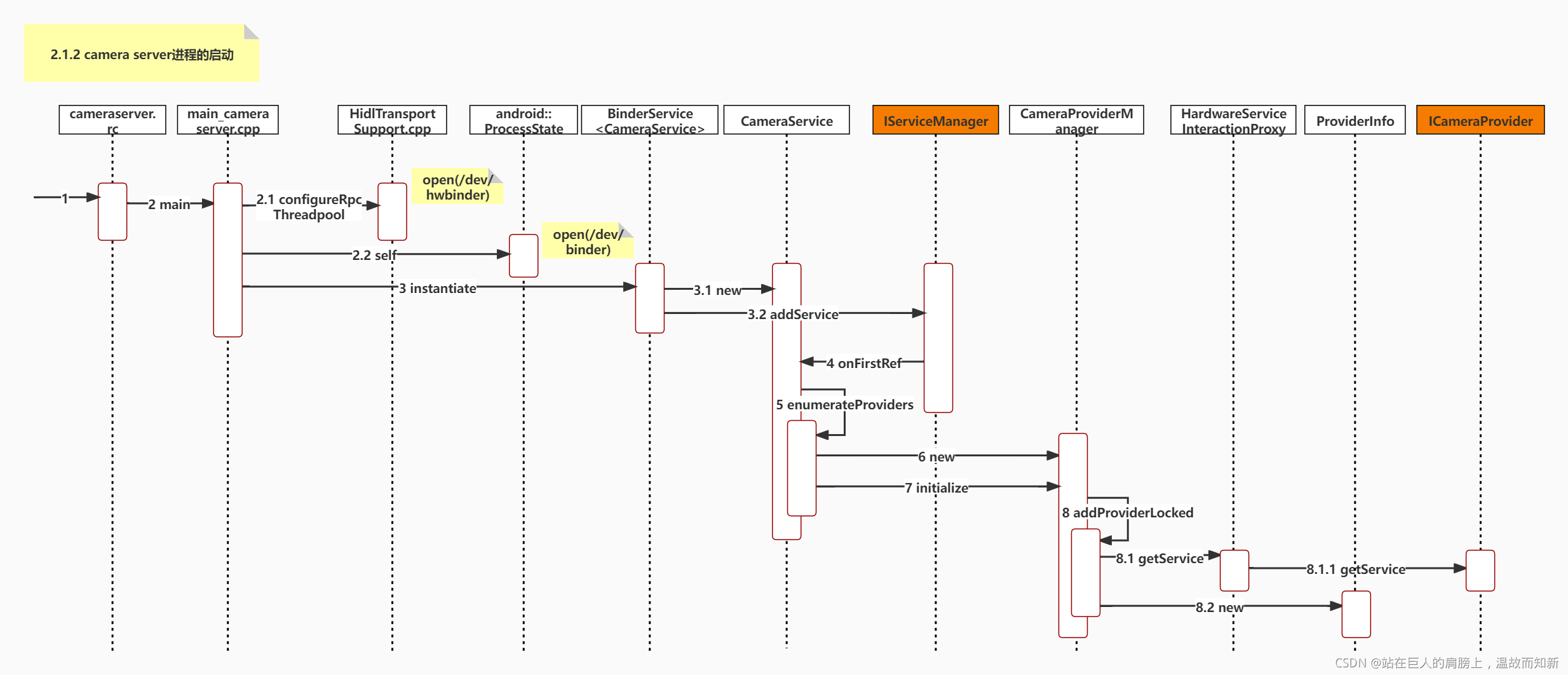
圖2-1-3 camera server行程的啟動UML順序圖
Step1 cameraserver.rc
啟動腳本
檔案:"frameworks/av/camera/cameraserver/cameraserver.rc"
service cameraserver /system/bin/cameraserver
class main
user cameraserver
group audio camera input drmrpc
ioprio rt 4
writepid /dev/cpuset/camera-daemon/tasks /dev/stune/top-app/taskscamera server行程由init行程啟動,
Step2 main
檔案:"frameworks/av/camera/cameraserver/main_cameraserver.cpp"
using namespace android;
int main(int argc __unused, char** argv __unused)
{
signal(SIGPIPE, SIG_IGN);
// Set 3 threads for HIDL calls
// open(/dev/hwbinder),用于和BnHwServiceManager通信
// 2.1
hardware::configureRpcThreadpool(3, /*willjoin*/ false);
// open(/dev/binder),用于和BnServiceManager通信
// 2.2
sp<ProcessState> proc(ProcessState::self());
// 獲得ServiceManager的代理類BpServiceManager, 注意不是HwServiceManager的代理類
sp<IServiceManager> sm = defaultServiceManager();
ALOGI("ServiceManager: %p", sm.get());
// 做了兩件事 (1)得到CameraService實體化物件 (2)注冊CameraService服務
// Step 3
CameraService::instantiate();
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
}注意,命名空間是android,
todo signal信號干嘛用的?
注意,defaultServiceManager()獲得的是ServiceManager不是HwServiceManager,即CameraService服務是注冊在ServiceManager里的,
defaultServiceManager的實作容易混淆,系統中有兩個實作,在呼叫時需要注意方法所在的域:
android:defaultServiceManager可以獲的BpServiceManager,
android:hardware:defaultServiceManager可以獲的BpHwServiceManager,
Step3 instantiate
檔案:"frameworks/native/libs/binder/include/binder/BinderService.h"
static void instantiate() { publish(); }
static status_t publish(bool allowIsolated = false,
int dumpFlags = IServiceManager::DUMP_FLAG_PRIORITY_DEFAULT) {
sp<IServiceManager> sm(defaultServiceManager());
// 3.1,3.2
return sm->addService(String16(SERVICE::getServiceName()), new SERVICE(), allowIsolated,
dumpFlags);
}這個 instantiate() 介面并不是定義在 CameraService 類中的,而是定義在 BinderService 類里(CameraService 繼承了它),在此處,它的作用是創建一個 CameraService實體,并將其注冊到 ServiceManager 中,
3.1 new CameraService
SERVICE為CameraService,
3.2 addService
檔案:"frameworks/native/libs/binder/IServiceManager.cpp"
virtual status_t addService(const String16& name, const sp<IBinder>& service,
bool allowIsolated, int dumpsysPriority) {
Parcel data, reply;
data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor());
data.writeString16(name);
data.writeStrongBinder(service);
data.writeInt32(allowIsolated ? 1 : 0);
data.writeInt32(dumpsysPriority);
status_t err = remote()->transact(ADD_SERVICE_TRANSACTION, data, &reply);
return err == NO_ERROR ? reply.readExceptionCode() : err;
}注意,在這一程序中CameraService被sp強指標參考了,通過UML類圖可以看出CameraService實際是IBinder的子類,
ICameraService.aidl:./frameworks/av/camera/aidl/android/hardware/ICameraService.aidl
ICameraService.aidl會通過aidl編譯生成ICameraService.h,
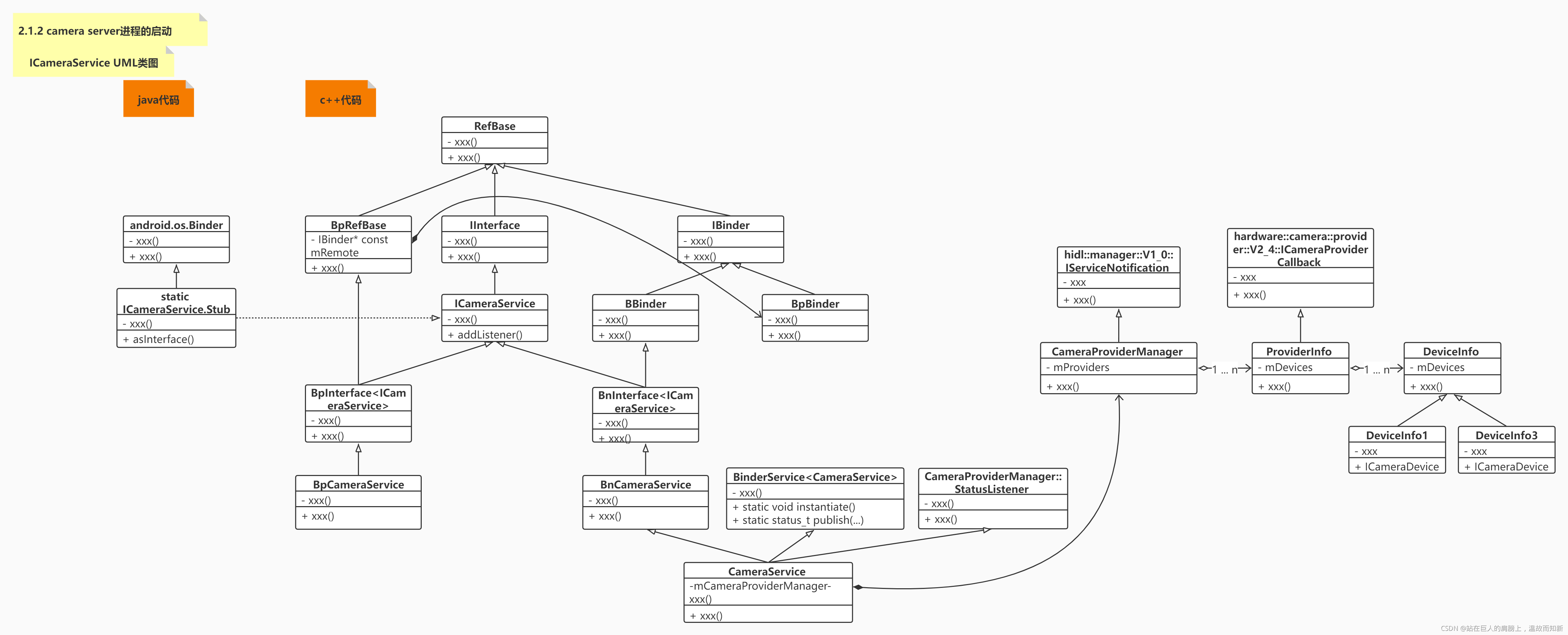
圖2-1-4 ICameraService UML類圖
Step4 onFirstRef
檔案:"frameworks/av/services/camera/libcameraservice/CameraService.cpp"
首次被sp強指標參考時,就會呼叫 onFirstRef() 函式,
void CameraService::onFirstRef()
{
ALOGI("CameraService process starting");
BnCameraService::onFirstRef();
// Update battery life tracking if service is restarting
BatteryNotifier& notifier(BatteryNotifier::getInstance());
notifier.noteResetCamera();
notifier.noteResetFlashlight();
status_t res = INVALID_OPERATION;
// Step 5
res = enumerateProviders();
if (res == OK) {
mInitialized = true;
}
CameraService::pingCameraServiceProxy();
mUidPolicy = new UidPolicy(this);
mUidPolicy->registerSelf();
}列舉Providers,
Step5 enumerateProviders
檔案:"frameworks/av/services/camera/libcameraservice/CameraService.cpp"
status_t CameraService::enumerateProviders() {
status_t res;
std::vector<std::string> deviceIds;
{
Mutex::Autolock l(mServiceLock);
if (nullptr == mCameraProviderManager.get()) {
// Step 6
mCameraProviderManager = new CameraProviderManager();
// Step 7
res = mCameraProviderManager->initialize(this);
if (res != OK) {
ALOGE("%s: Unable to initialize camera provider manager: %s (%d)",
__FUNCTION__, strerror(-res), res);
return res;
}
}
...
deviceIds = mCameraProviderManager->getCameraDeviceIds();
}
for (auto& cameraId : deviceIds) {
String8 id8 = String8(cameraId.c_str());
onDeviceStatusChanged(id8, CameraDeviceStatus::PRESENT);
}
return OK;
}將 CameraProviderManager 實體化,然后呼叫 initialize() 介面初始化,傳入的引數是 this 指標,指向當前CameraService實體的地址,
Step6 new CameraProviderManager()
檔案:"frameworks/av/services/camera/libcameraservice/common/CameraProviderManager.cpp"
Step7 initialize
檔案:"frameworks/av/services/camera/libcameraservice/common/CameraProviderManager.h"
先看下函式宣告:
/**
* Initialize the manager and give it a status listener; optionally accepts a service
* interaction proxy.
*
* The default proxy communicates via the hardware service manager; alternate proxies can be
* used for testing. The lifetime of the proxy must exceed the lifetime of the manager.
*/
status_t initialize(wp<StatusListener> listener,
ServiceInteractionProxy *proxy = &sHardwareServiceInteractionProxy);wp<StatusListener> listener是CameraService 實體,采用的是默認代理,默認代理有什么作用?(Step 9)
檔案:"frameworks/av/services/camera/libcameraservice/common/CameraProviderManager.cpp"
status_t CameraProviderManager::initialize(wp<CameraProviderManager::StatusListener> listener,
ServiceInteractionProxy* proxy) {
std::lock_guard<std::mutex> lock(mInterfaceMutex);
if (proxy == nullptr) {
ALOGE("%s: No valid service interaction proxy provided", __FUNCTION__);
return BAD_VALUE;
}
// listener是CameraService 物件
mListener = listener;
// proxy是sHardwareServiceInteractionProxy
mServiceProxy = proxy;
// Registering will trigger notifications for all already-known providers
bool success = mServiceProxy->registerForNotifications(
/* instance name, empty means no filter */ "",
this);
if (!success) {
ALOGE("%s: Unable to register with hardware service manager for notifications "
"about camera providers", __FUNCTION__);
return INVALID_OPERATION;
}
// See if there's a passthrough HAL, but let's not complain if there's not
// Step 8
addProviderLocked(kLegacyProviderName, /*expected*/ false);
addProviderLocked(kExternalProviderName, /*expected*/ false);
return OK;
}通過服務代理作出一個注冊動作,根據注釋,注冊會觸發一個給所有已知 Provider 進行通知的動作,傳入的引數 kLegacyProviderName,為字串"legacy/0",
Step8 addProviderLocked
檔案:"frameworks/av/services/camera/libcameraservice/common/CameraProviderManager.cpp"
status_t CameraProviderManager::addProviderLocked(const std::string& newProvider, bool expected) {
for (const auto& providerInfo : mProviders) {
if (providerInfo->mProviderName == newProvider) {
ALOGW("%s: Camera provider HAL with name '%s' already registered", __FUNCTION__,
newProvider.c_str());
return ALREADY_EXISTS;
}
}
sp<provider::V2_4::ICameraProvider> interface;
// 上面分析過mServiceProxy=sHardwareServiceInteractionProxy,這里getService(newProvider)其實就是得到CameraProvider的代理類(BpHwCameraProvider)
// 8.1
interface = mServiceProxy->getService(newProvider);
if (interface == nullptr) {
if (expected) {
ALOGE("%s: Camera provider HAL '%s' is not actually available", __FUNCTION__,
newProvider.c_str());
return BAD_VALUE;
} else {
return OK;
}
}
// 8.2
sp<ProviderInfo> providerInfo = new ProviderInfo(newProvider, interface, this);
status_t res = providerInfo->initialize();
if (res != OK) {
return res;
}
mProviders.push_back(providerInfo);
return OK;
}檢查已知的 Provider 中是否已有名為 legacy/0 的,
根據 legacy/0 從服務代理處獲取 CameraProvider 介面,這里getService(newProvider)其實就是得到CameraProvider的代理類(BpHwCameraProvider),采用的是默認代理即sHardwareServiceInteractionProxy,
通過ProviderInfo來保存當前 Provider相關資訊,
8.1 getService
檔案:"frameworks/av/services/camera/libcameraservice/common/CameraProviderManager.h"
// Standard use case - call into the normal generated static methods which invoke
// the real hardware service manager
struct HardwareServiceInteractionProxy : public ServiceInteractionProxy {
...
virtual sp<hardware::camera::provider::V2_4::ICameraProvider> getService(
const std::string &serviceName) override {
// getStub的默認值為flase,之前分析過getStub = flase 會得到 CameraProvider 的代理類(BpHwCameraProvider)
// 8.1.1
return hardware::camera::provider::V2_4::ICameraProvider::getService(serviceName);
}
};getService的實作在hidl編譯生成的CameraProviderAll.cpp里,
小結:framework的上層通過ServiceManager(/dev/binder)得到CameraService服務,而CameraService通過HwServiceManager(/dev/hwbinder)得到 CameraProvider 服務,而CameraProvider可以訪問Camera HAL,這樣上層 framework 就能夠訪問 Camera HAL 了,
2.1.3 總結流程
1 camera provider行程啟動,實體化CameraProvider,并將CameraProvider服務注冊到HwServiceManager;
在CameraProvider初始化程序中,從動態庫中加載了HAL層的關鍵結構(camera_module_t),并將其封裝到CameraModule中,
2 camera server行程啟動,實體化CameraService,并將CameraService服務注冊到ServiceManager,
3 由于強指標首次參考,CameraService::onFirstRef()被呼叫,進行初始化;在CameraService初始化程序中,通過CameraProviderManager來獲取HwServiceManager中已注冊的CameraProvider服務,獲取BpHwCameraProvider實體,
這樣,framework的上層通過ServiceManager(/dev/binder)得到CameraService服務,而CameraService通過HwServiceManager(/dev/hwbinder)得到 CameraProvider 服務,而CameraProvider可以訪問Camera HAL,這樣上層 framework 就能夠訪問 Camera HAL 了,
2.2 app(camera client)行程<-->camera server行程
打開相機的流程就是打通 APP 到相機設備之間的連路的程序,按照Android架構從上到下依次打通下行控制路線,并通過設定回呼來構建上行的狀態、資料路線,
下圖是OpenCamera總體架構圖,黑色虛線是下行路線,紅色虛線是上行路線:
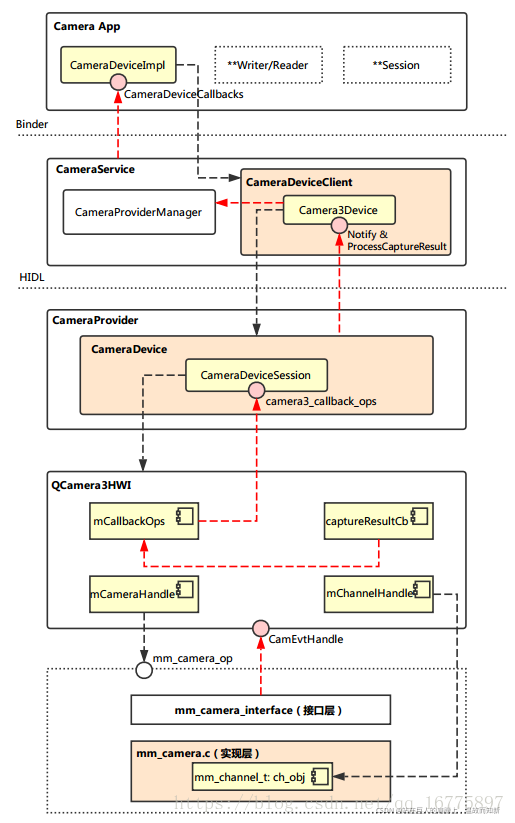
圖2-2-1 OpenCamera總體架構圖
上圖包含了三層的內容:
1 app(camera client)行程
2 camera server行程
3 hal(camera provider)行程
2.1節中我們已經分析了camera provider行程和camera server行程的啟動和初始化程序,下面我們按照如下三個內容繼續分析:
1 app(camera client)行程<-->camera server行程(2.2節)
2 camera server行程<-->hal(camera provider)行程(2.3節)
3 camera hal(2.4節)
本節(2.2節)詳細分析app(camera client)行程<-->camera server行程這個程序,這一部分主要的函式呼叫邏輯如下圖所示,
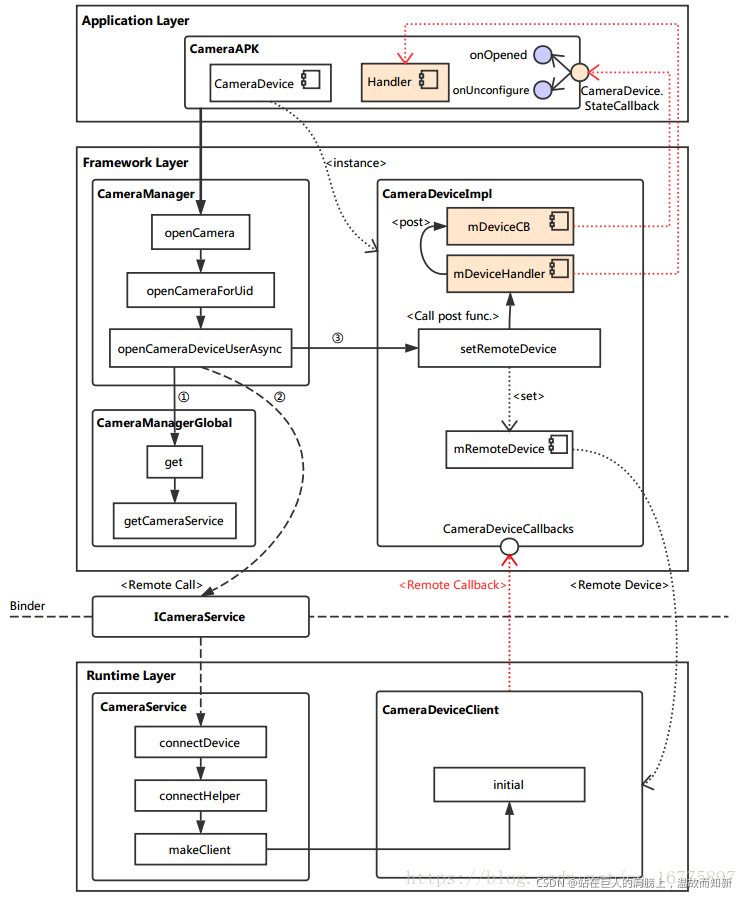
圖2-2-2 app(camera client)行程<-->camera server行程架構圖
下圖是app(camera client)行程<-->camera server行程 UML順序圖,根據UML順序圖分析原始碼:
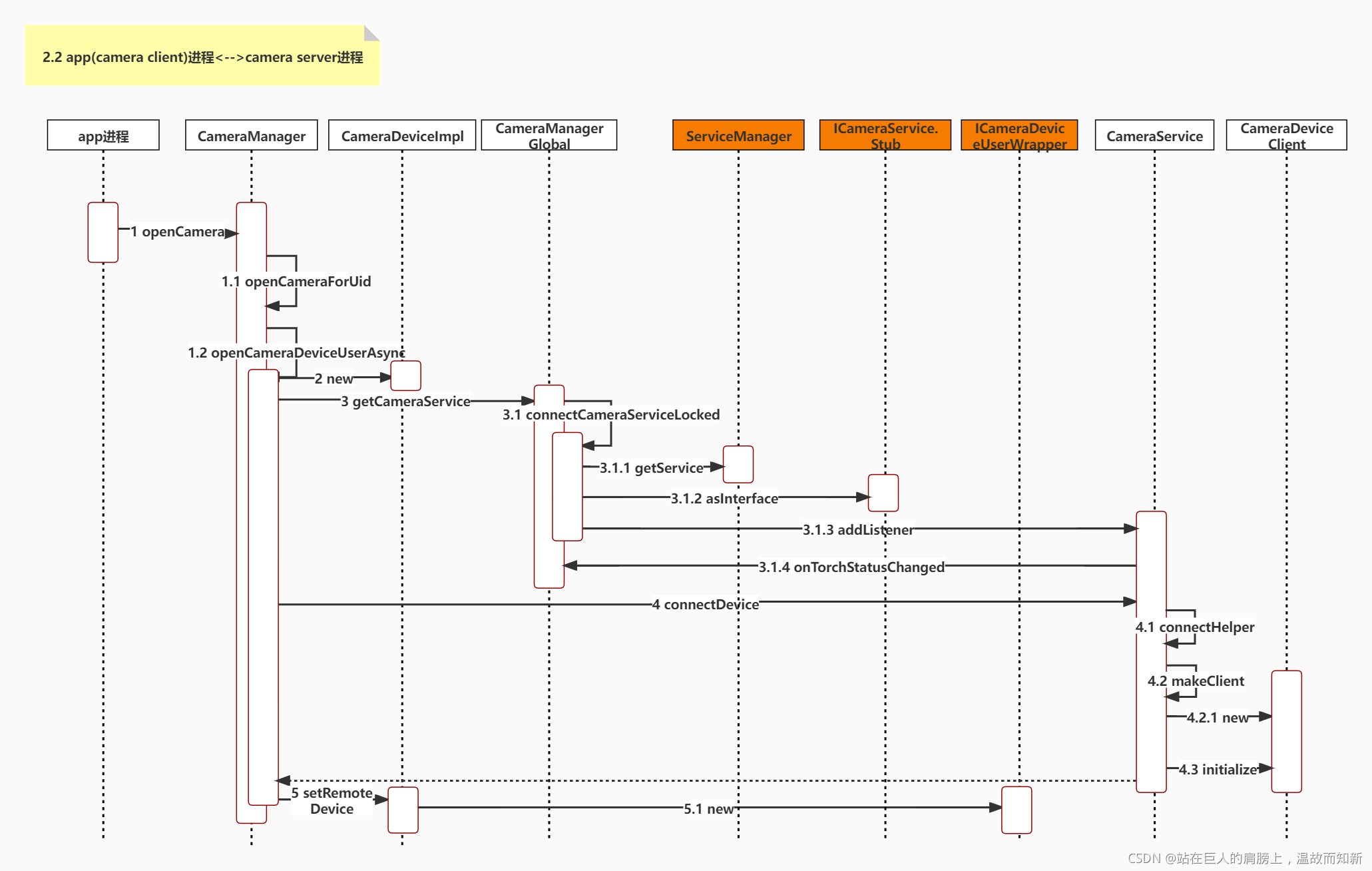
圖2-2-3 app(camera client)行程<-->camera server行程 UML順序圖
Step1 openCamera
檔案:"./frameworks/base/core/java/android/hardware/camera2/CameraManager.java"
@RequiresPermission(android.Manifest.permission.CAMERA)
public void openCamera(@NonNull String cameraId,
@NonNull final CameraDevice.StateCallback callback, @Nullable Handler handler)
throws CameraAccessException {
// 1.1
openCameraForUid(cameraId, callback, CameraDeviceImpl.checkAndWrapHandler(handler),
USE_CALLING_UID);
}
public void openCameraForUid(@NonNull String cameraId,
@NonNull final CameraDevice.StateCallback callback, @NonNull Executor executor,
int clientUid)
throws CameraAccessException {
...
// 1.2
openCameraDeviceUserAsync(cameraId, callback, executor, clientUid);
}app行程里打開相機:mCameraManager.openCamera,最后呼叫openCameraDeviceUserAsync,
1.2 openCameraDeviceUserAsync
檔案:"./frameworks/base/core/java/android/hardware/camera2/CameraManager.java"
private CameraDevice openCameraDeviceUserAsync(String cameraId,
CameraDevice.StateCallback callback, Executor executor, final int uid)
throws CameraAccessException {
CameraCharacteristics characteristics = getCameraCharacteristics(cameraId);
CameraDevice device = null;
synchronized (mLock) {
ICameraDeviceUser cameraUser = null;
// 應用端的相機物件類
// Step2
android.hardware.camera2.impl.CameraDeviceImpl deviceImpl =
new android.hardware.camera2.impl.CameraDeviceImpl(
cameraId,
callback,
executor,
characteristics,
mContext.getApplicationInfo().targetSdkVersion);
// 應用端的回呼函式
ICameraDeviceCallbacks callbacks = deviceImpl.getCallbacks();
try {
if (supportsCamera2ApiLocked(cameraId)) {
// Use cameraservice's cameradeviceclient implementation for HAL3.2+ devices
// Step3
ICameraService cameraService = CameraManagerGlobal.get().getCameraService();
if (cameraService == null) {
throw new ServiceSpecificException(
ICameraService.ERROR_DISCONNECTED,
"Camera service is currently unavailable");
}
// 通過cameraService跨行程獲得BpCameraDeviceUser物件
// Step4
cameraUser = cameraService.connectDevice(callbacks, cameraId,
mContext.getOpPackageName(), uid);
} else {
...
}
} catch (ServiceSpecificException e) {
...
}
// TODO: factor out callback to be non-nested, then move setter to constructor
// For now, calling setRemoteDevice will fire initial
// onOpened/onUnconfigured callbacks.
// This function call may post onDisconnected and throw CAMERA_DISCONNECTED if
// cameraUser dies during setup.
// 保存CameraDeviceClient物件到CameraDeviceImpl,觸發應用的回呼函式
// Step5
deviceImpl.setRemoteDevice(cameraUser);
device = deviceImpl;
}
return device;
}Step2,首先實體化一個android.hardware.camera2.impl.CameraDeviceImpl物件,值得注意的是,構造時傳入了 CameraDevice.StateCallback 以及 Handler,注意,CameraDeviceImpl類是CameraDevice類的子類,這兩個類是app層用來管理camera設備的,
Step3,通過CameraManagerGlobal獲取CameraService的本地介面(BpCameraService),(即圖2-1-4 ICameraService UML類圖BpCameraService),
todo ICameraService.Stub與BpCameraService是如何通過aidl聯系上的?
Step4,通過BpCameraService遠端呼叫connectDevice 法連接到相機設備,注意回傳的cameraUser實際上指向的是遠端CameraDeviceClient的本地介面(BpCameraDeviceUser),ICameraDeviceUser UML類圖如下:
frameworks/av/camera/aidl/android/hardware/camera2/ICameraDeviceUser.aidl
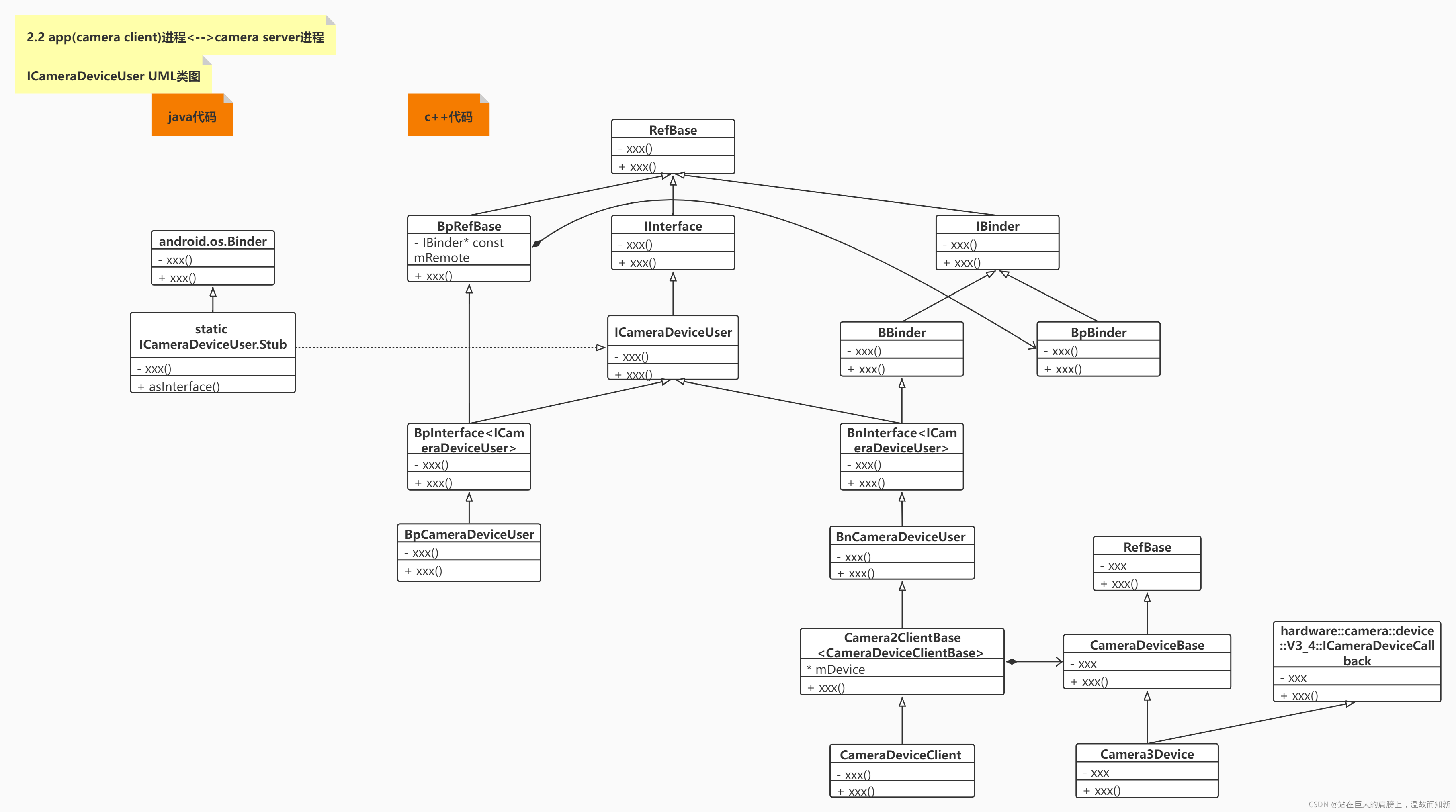
圖2-2-4 ICameraDeviceUser UML類圖
Step5,最后將CameraDeviceClient物件保存到CameraDeviceImpl中進行管理,
Step2 new android.hardware.camera2.impl.CameraDeviceImpl
檔案:"frameworks/base/core/java/android/hardware/camera2/impl/CameraDeviceImpl.java"
將輸入引數保存到該類的成員變數,
Step3 getCameraService
檔案: "frameworks/base/core/java/android/hardware/camera2/CameraManager.java"
注意這個CameraManagerGlobal類,是個static單例類,用來保存對CameraService的連接,
/**
* A per-process global camera manager instance, to retain a connection to the camera service,
* and to distribute camera availability notices to API-registered callbacks
*/
private static final class CameraManagerGlobal extends ICameraServiceListener.Stub
implements IBinder.DeathRecipient
{
private static final String TAG = "CameraManagerGlobal";
...
// Singleton instance
private static final CameraManagerGlobal gCameraManager =
new CameraManagerGlobal();
...
// Singleton, don't allow construction
private CameraManagerGlobal() {
}
public static CameraManagerGlobal get() {
return gCameraManager;
}
/**
* Return a best-effort ICameraService.
*
* <p>This will be null if the camera service is not currently available. If the camera
* service has died since the last use of the camera service, will try to reconnect to the
* service.</p>
*/
public ICameraService getCameraService() {
synchronized(mLock) {
//3.1
connectCameraServiceLocked();
if (mCameraService == null && !sCameraServiceDisabled) {
Log.e(TAG, "Camera service is unavailable");
}
return mCameraService;
}
}
}ICameraServiceListener.aidl:./frameworks/av/camera/aidl/android/hardware/ICameraServiceListener.aidl
3.1 connectCameraServiceLocked
/**
* Connect to the camera service if it's available, and set up listeners.
* If the service is already connected, do nothing.
*
* <p>Sets mCameraService to a valid pointer or null if the connection does not succeed.</p>
*/
private void connectCameraServiceLocked() {
// Only reconnect if necessary
if (mCameraService != null || sCameraServiceDisabled) return;
Log.i(TAG, "Connecting to camera service");
// 3.1.1
IBinder cameraServiceBinder = ServiceManager.getService(CAMERA_SERVICE_BINDER_NAME);
...
// 3.1.2
ICameraService cameraService = ICameraService.Stub.asInterface(cameraServiceBinder);
try {
// 注冊回呼監聽,CameraService(下層)可以通知CameraManagerGlobal(上層)狀態變化
// 3.1.3
CameraStatus[] cameraStatuses = cameraService.addListener(this);
for (CameraStatus c : cameraStatuses) {
onStatusChangedLocked(c.status, c.cameraId);
}
mCameraService = cameraService;
}
}首先從ServiceManager里查找CameraService服務,CAMERA_SERVICE_BINDER_NAME為字串"media.camera",找到CameraService后,將CameraManagerGlobal類的this指標設定為CameraService的回呼監聽,
3.1.3 addListener
檔案:frameworks/av/services/camera/libcameraservice/CameraService.cpp
來看下整體架構圖中的ICameraServiceListener.aidl回呼介面怎么注冊的:
// 注冊回呼
private void connectCameraServiceLocked() {
...
// 3.1.3
CameraStatus[] cameraStatuses = cameraService.addListener(this);
for (CameraStatus c : cameraStatuses) {
onStatusChangedLocked(c.status, c.cameraId);
}
}
// 呼叫服務
Status CameraService::addListener(const sp<ICameraServiceListener>& listener,
std::vector<hardware::CameraStatus> *cameraStatuses) {
for (size_t i = 0; i < mTorchStatusMap.size(); i++ ) {
String16 id = String16(mTorchStatusMap.keyAt(i).string());
// 跨行程回呼監聽函式
// 3.1.4
listener->onTorchStatusChanged(mapToInterface(mTorchStatusMap.valueAt(i)), id);
}
}通過以上注冊回呼和呼叫服務的流程,實作將java服務作為監聽物件注冊到C++層服務,C++層服務跨行程回呼java層服務,下圖是ICameraServiceListener UML類圖:
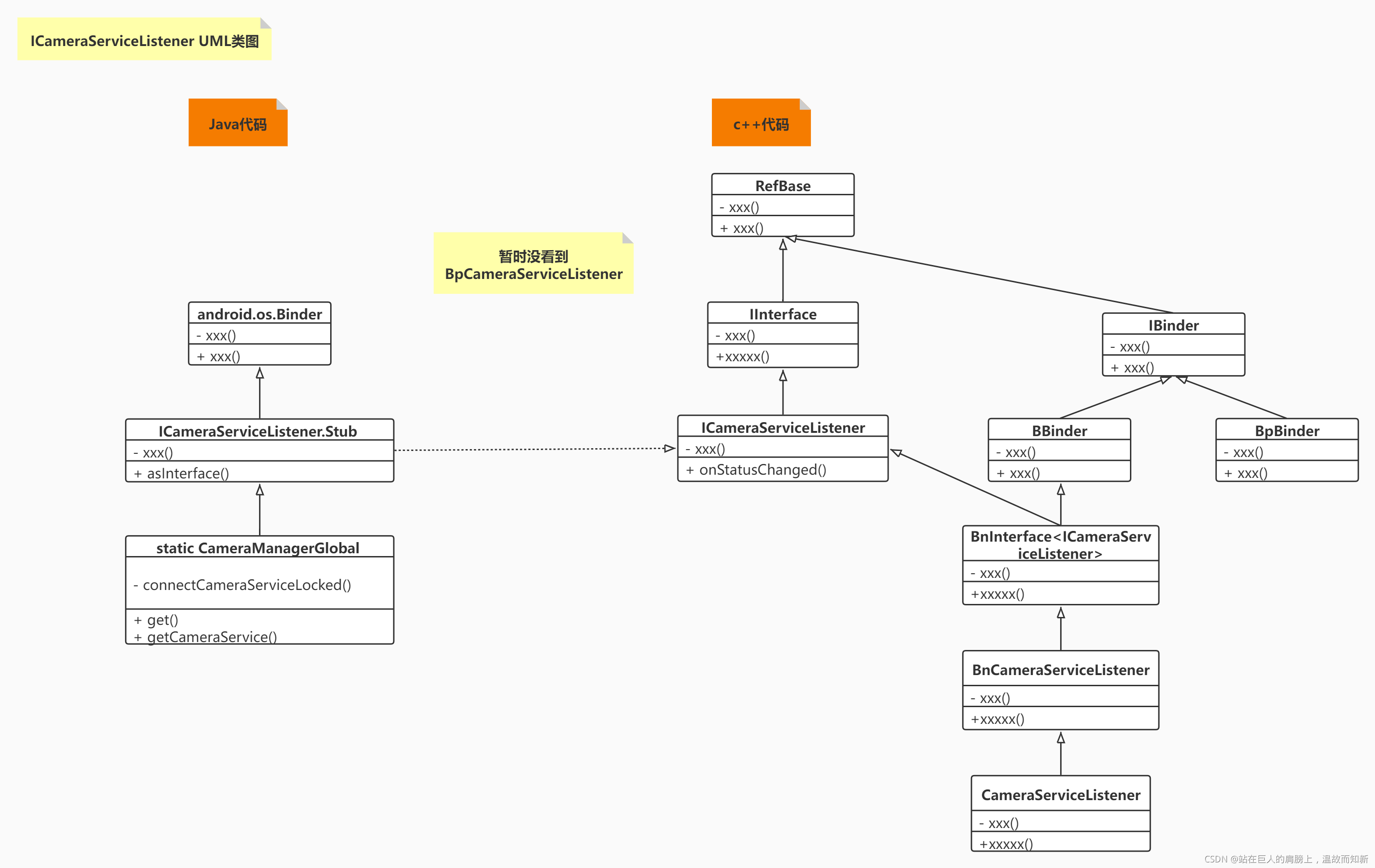
圖2-2-5 ICameraServiceListener UML類圖
Step4 connectDevice
檔案:"./frameworks/av/services/camera/libcameraservice/CameraService.cpp"
Status CameraService::connectDevice(
const sp<hardware::camera2::ICameraDeviceCallbacks>& cameraCb,
const String16& cameraId,
const String16& clientPackageName,
int clientUid,
/*out*/
sp<hardware::camera2::ICameraDeviceUser>* device) {
ATRACE_CALL();
Status ret = Status::ok();
String8 id = String8(cameraId);
sp<CameraDeviceClient> client = nullptr;
// 4.1
ret = connectHelper<hardware::camera2::ICameraDeviceCallbacks,CameraDeviceClient>(cameraCb, id,
/*api1CameraId*/-1,
CAMERA_HAL_API_VERSION_UNSPECIFIED, clientPackageName,
clientUid, USE_CALLING_PID, API_2,
/*legacyMode*/ false, /*shimUpdateOnly*/ false,
/*out*/client);
if(!ret.isOk()) {
logRejected(id, getCallingPid(), String8(clientPackageName),
ret.toString8());
return ret;
}
*device = client;
return ret;
}這個方法實作在CameraService類中,client是最侄訓傳的CameraDeviceClient物件,
template<class CALLBACK, class CLIENT>
Status CameraService::connectHelper(const sp<CALLBACK>& cameraCb, const String8& cameraId,
int halVersion, const String16& clientPackageName, int clientUid, int clientPid,
apiLevel effectiveApiLevel, bool legacyMode, bool shimUpdateOnly,
/*out*/sp<CLIENT>& device) {
binder::Status ret = binder::Status::ok();
String8 clientName8(clientPackageName);
...
sp<BasicClient> tmp = nullptr;
// 4.2
if(!(ret = makeClient(this, cameraCb, clientPackageName, cameraId, facing, clientPid,
clientUid, getpid(), legacyMode, halVersion, deviceVersion, effectiveApiLevel,
/*out*/&tmp)).isOk()) {
return ret;
}
client = static_cast<CLIENT*>(tmp.get());
LOG_ALWAYS_FATAL_IF(client.get() == nullptr, "%s: CameraService in invalid state",
__FUNCTION__);
// 4.3
err = client->initialize(mCameraProviderManager);
...
// Important: release the mutex here so the client can call back into the service from its
// destructor (can be at the end of the call)
device = client;
return ret;
}CALLBACK為ICameraDeviceCallbacks,CLIENT為CameraDeviceClient,先通過makeClient生成client(CameraDeviceClient物件),再呼叫CameraDeviceClient的initialize函式,
4.2 makeClient
Status CameraService::makeClient(const sp<CameraService>& cameraService,
const sp<IInterface>& cameraCb, const String16& packageName, const String8& cameraId,
int api1CameraId, int facing, int clientPid, uid_t clientUid, int servicePid,
bool legacyMode, int halVersion, int deviceVersion, apiLevel effectiveApiLevel,
/*out*/sp<BasicClient>* client) {
if (halVersion < 0 || halVersion == deviceVersion) {
switch(deviceVersion) {
...
case CAMERA_DEVICE_API_VERSION_3_4:
if (effectiveApiLevel == API_1) { // Camera1 API route
sp<ICameraClient> tmp = static_cast<ICameraClient*>(cameraCb.get());
*client = new Camera2Client(cameraService, tmp, packageName,
cameraId, api1CameraId,
facing, clientPid, clientUid,
servicePid, legacyMode);
} else { // Camera2 API route
sp<hardware::camera2::ICameraDeviceCallbacks> tmp =
static_cast<hardware::camera2::ICameraDeviceCallbacks*>(cameraCb.get());
//4.2.1
*client = new CameraDeviceClient(cameraService, tmp, packageName, cameraId,
facing, clientPid, clientUid, servicePid);
}
break;
default:
// Should not be reachable
ALOGE("Unknown camera device HAL version: %d", deviceVersion);
return STATUS_ERROR_FMT(ERROR_INVALID_OPERATION,
"Camera device \"%s\" has unknown HAL version %d",
cameraId.string(), deviceVersion);
}
} else {
...
}
...
}makeClient主要是根據 API 版本以及 HAL 版本來實體化CameraDeviceClient,最后在Step5,這一client回傳到openCameraDeviceUserAsync中保存起來,
Step5 setRemoteDevice
檔案:"./frameworks/base/core/java/android/hardware/camera2/impl/CameraDeviceImpl.java"
/**
* Set remote device, which triggers initial onOpened/onUnconfigured callbacks
*
* <p>This function may post onDisconnected and throw CAMERA_DISCONNECTED if remoteDevice dies
* during setup.</p>
*
*/
public void setRemoteDevice(ICameraDeviceUser remoteDevice) throws CameraAccessException {
synchronized(mInterfaceLock) {
// TODO: Move from decorator to direct binder-mediated exceptions
// If setRemoteFailure already called, do nothing
if (mInError) return;
// 5.1
mRemoteDevice = new ICameraDeviceUserWrapper(remoteDevice);
IBinder remoteDeviceBinder = remoteDevice.asBinder();
// For legacy camera device, remoteDevice is in the same process, and
// asBinder returns NULL.
if (remoteDeviceBinder != null) {
try {
remoteDeviceBinder.linkToDeath(this, /*flag*/ 0);
} catch (RemoteException e) {
CameraDeviceImpl.this.mDeviceExecutor.execute(mCallOnDisconnected);
throw new CameraAccessException(CameraAccessException.CAMERA_DISCONNECTED,
"The camera device has encountered a serious error");
}
}
mDeviceExecutor.execute(mCallOnOpened);
mDeviceExecutor.execute(mCallOnUnconfigured);
}
}將打開Camera獲取的ICameraDeviceUser物件(即Framework層的CameraDeviceClient物件)封裝到一個ICameraDeviceUserWrapper類的實體中,并保存為mRemoteDevice,注意,此處觸發onOpened與onUnconfigured這兩個回呼,每個回呼都是通過mDeviceHandler啟用一個新執行緒來呼叫的,
小結:
通過以上流程,相機應用獲得了CameraDeviceImpl物件,而CameraDeviceImpl保存了ICameraDeviceUserWrapper物件,ICameraDeviceUserWrapper保存BpCameraDeviceUser物件,BpCameraDeviceUser具有aidl跨行程的能力,這樣應用就可以和CameraService端的CameraDeviceClient進行通信了,
Java層要想與C++層的CameraService層進行通信,是通過aidl進行的,主要包括ICameraService.aidl以及ICameraDeviceUser.aidl兩個介面來實作,其會在Java層維護一個CameraDeviceImpl類(即BpCameraDeviceUser類),
2.3 camera server行程<-->hal(camera provider)行程
camera server行程與camera provider行程,它們之間通過HIDL進行通信,CameraService會尋找現存的ProviderService,將其加入到內部的 CameraProviderManager中進行管理,相關操作都是通過遠端呼叫進行的;而CameraProvider,它在初始化時(initialize)就已經連接到libhardware的Camera HAL實作層,并用CameraModule來進行管理,(圖2-1-1 camera server行程與hal(camera provider)行程啟動架構圖)
這一部分的主要呼叫邏輯如下圖:
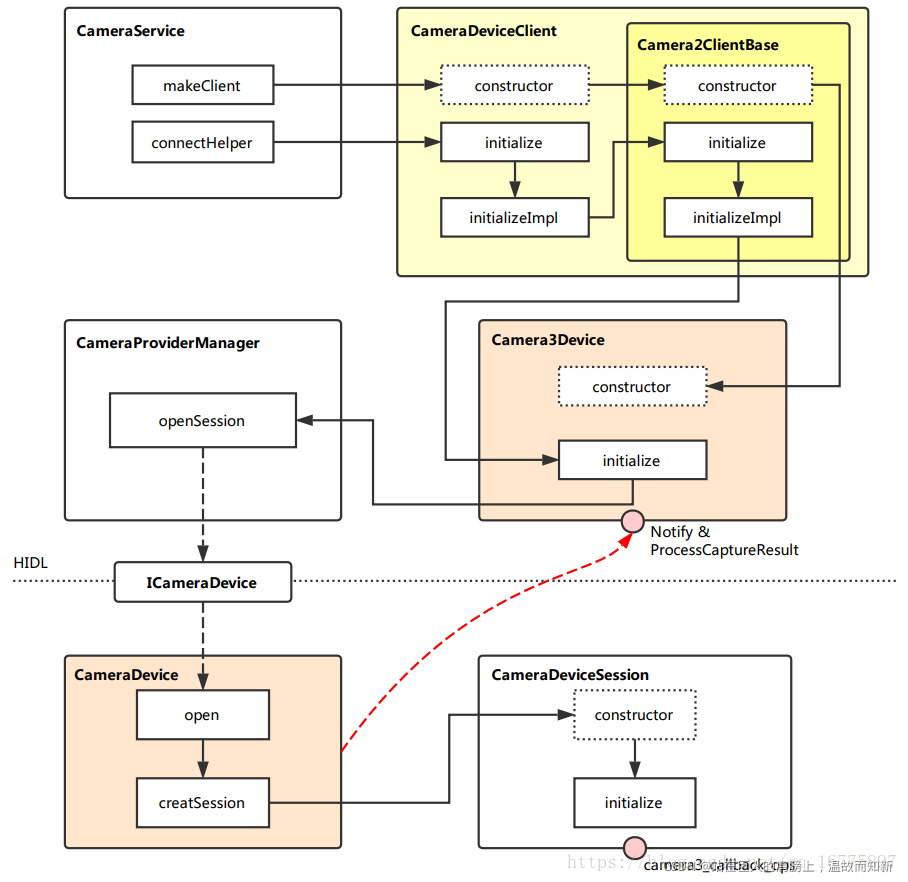
圖2-3-1 camera server行程<-->hal(camera provider)行程架構圖
下圖是camera server行程<-->hal(camera provider)行程 UML順序圖:
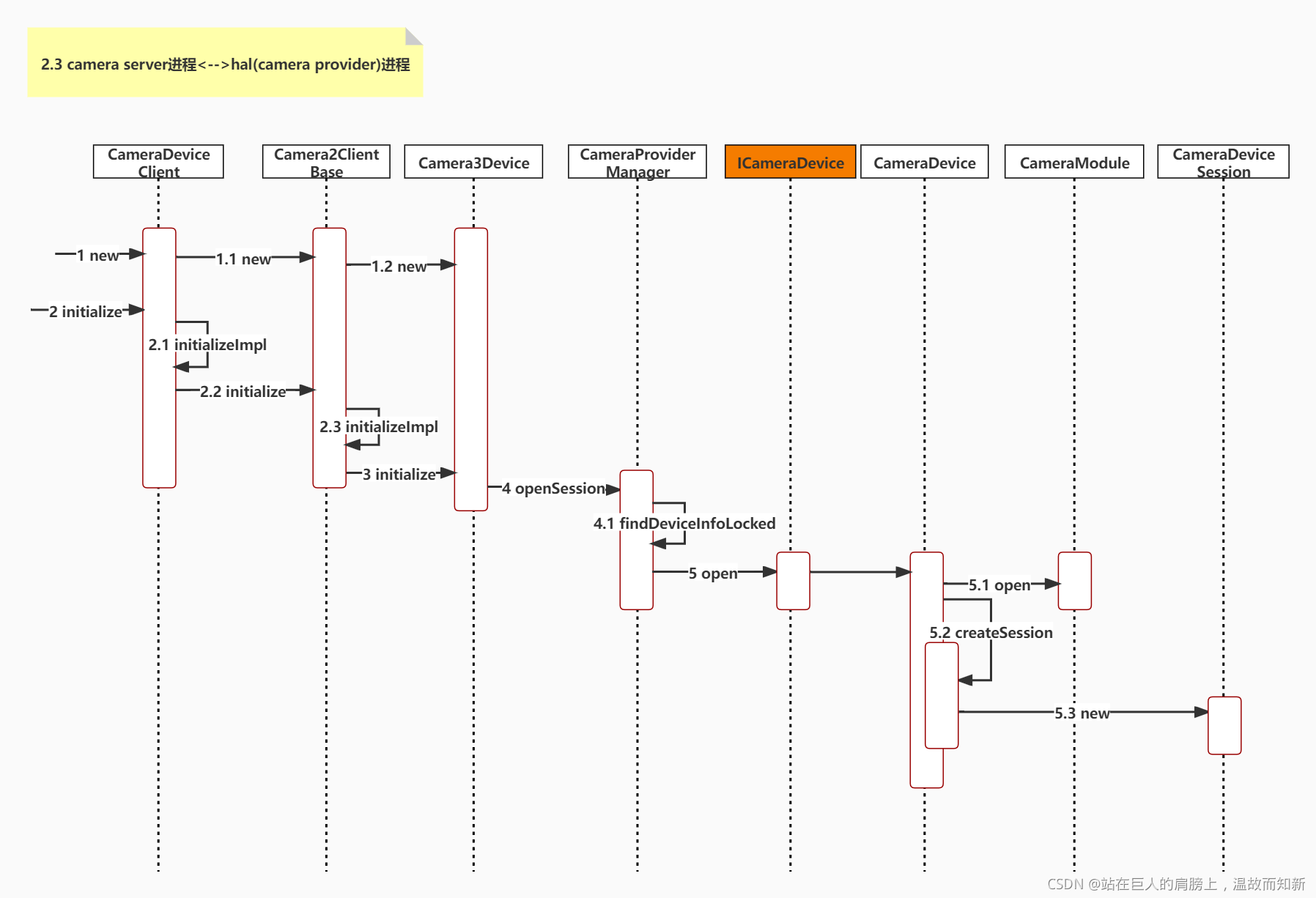
圖2-3-2 camera server行程<-->hal(camera provider)行程 UML順序圖
2.2節(4.2.1)講到實體化了一個CameraDeviceClient物件,我們從它的建構式開始分析:
Step1 new CameraDeviceClient(2.2節(4.2.1))
檔案:"./frameworks/av/services/camera/libcameraservice/api2/CameraDeviceClient.cpp"
CameraDeviceClient::CameraDeviceClient(const sp<CameraService>& cameraService,
const sp<hardware::camera2::ICameraDeviceCallbacks>& remoteCallback,
const String16& clientPackageName,
const String8& cameraId,
int cameraFacing,
int clientPid,
uid_t clientUid,
int servicePid) :
// 1.1
Camera2ClientBase(cameraService, remoteCallback, clientPackageName,
cameraId, /*API1 camera ID*/ -1,
cameraFacing, clientPid, clientUid, servicePid),
mInputStream(),
mStreamingRequestId(REQUEST_ID_NONE),
mRequestIdCounter(0) {
ATRACE_CALL();
ALOGI("CameraDeviceClient %s: Opened", cameraId.string());
}1.1 Camera2ClientBase
檔案:"frameworks/av/services/camera/libcameraservice/common/Camera2ClientBase.cpp"
template <typename TClientBase>
Camera2ClientBase<TClientBase>::Camera2ClientBase(
const sp<CameraService>& cameraService,
const sp<TCamCallbacks>& remoteCallback,
const String16& clientPackageName,
const String8& cameraId,
int api1CameraId,
int cameraFacing,
int clientPid,
uid_t clientUid,
int servicePid):
TClientBase(cameraService, remoteCallback, clientPackageName,
cameraId, api1CameraId, cameraFacing, clientPid, clientUid, servicePid),
mSharedCameraCallbacks(remoteCallback),
mDeviceVersion(cameraService->getDeviceVersion(TClientBase::mCameraIdStr)),
mDeviceActive(false), mApi1CameraId(api1CameraId)
{
ALOGI("Camera %s: Opened. Client: %s (PID %d, UID %d)", cameraId.string(),
String8(clientPackageName).string(), clientPid, clientUid);
mInitialClientPid = clientPid;
// 1.2
mDevice = new Camera3Device(cameraId);
LOG_ALWAYS_FATAL_IF(mDevice == 0, "Device should never be NULL here.");
}TClientBase是CameraDeviceClientBase類,從ICameraDeviceUser UML類圖中CameraDeviceClient的繼承關系可以看出,TCamCallbacks是ICameraDeviceCallbacks類,創建Camera3Device實體,
1.2 new Camera3Device
檔案:"frameworks/av/services/camera/libcameraservice/device3/Camera3Device.cpp"
Camera3Device::Camera3Device(const String8 &id):
mId(id),
mOperatingMode(NO_MODE),
mIsConstrainedHighSpeedConfiguration(false),
mStatus(STATUS_UNINITIALIZED),
mStatusWaiters(0),
mUsePartialResult(false),
mNumPartialResults(1),
mTimestampOffset(0),
mNextResultFrameNumber(0),
mNextReprocessResultFrameNumber(0),
mNextShutterFrameNumber(0),
mNextReprocessShutterFrameNumber(0),
mListener(NULL),
mVendorTagId(CAMERA_METADATA_INVALID_VENDOR_ID),
mLastTemplateId(-1)
{
ATRACE_CALL();
camera3_callback_ops::notify = &sNotify;
camera3_callback_ops::process_capture_result = &sProcessCaptureResult;
ALOGV("%s: Created device for camera %s", __FUNCTION__, mId.string());
}設定兩個回呼,
Step2 initialize(2.2節(4.3))
檔案:"./frameworks/av/services/camera/libcameraservice/api2/CameraDeviceClient.cpp"
status_t CameraDeviceClient::initialize(sp<CameraProviderManager> manager,
const String8& monitorTags) {
// 2.1
return initializeImpl(manager, monitorTags);
}
template<typename TProviderPtr>
status_t CameraDeviceClient::initializeImpl(TProviderPtr providerPtr, const String8& monitorTags) {
ATRACE_CALL();
status_t res;
// 2.2
res = Camera2ClientBase::initialize(providerPtr, monitorTags);
if (res != OK) {
return res;
}
...
return OK;
}TProviderPtr是指CameraProviderManager類,呼叫父類初始化介面,
2.2 Camera2ClientBase::initialize
檔案:"frameworks/av/services/camera/libcameraservice/common/Camera2ClientBase.cpp"
template <typename TClientBase>
status_t Camera2ClientBase<TClientBase>::initialize(sp<CameraProviderManager> manager,
const String8& monitorTags) {
// 2.3
return initializeImpl(manager, monitorTags);
}
template <typename TClientBase>
template <typename TProviderPtr>
status_t Camera2ClientBase<TClientBase>::initializeImpl(TProviderPtr providerPtr,
const String8& monitorTags) {
ATRACE_CALL();
ALOGV("%s: Initializing client for camera %s", __FUNCTION__,
TClientBase::mCameraIdStr.string());
status_t res;
// Verify ops permissions
res = TClientBase::startCameraOps();
if (res != OK) {
return res;
}
if (mDevice == NULL) {
ALOGE("%s: Camera %s: No device connected",
__FUNCTION__, TClientBase::mCameraIdStr.string());
return NO_INIT;
}
// Step 3
res = mDevice->initialize(providerPtr, monitorTags);
if (res != OK) {
ALOGE("%s: Camera %s: unable to initialize device: %s (%d)",
__FUNCTION__, TClientBase::mCameraIdStr.string(), strerror(-res), res);
return res;
}
wp<CameraDeviceBase::NotificationListener> weakThis(this);
res = mDevice->setNotifyCallback(weakThis);
return OK;
}注意此處,TClientBase 對應 CameraDeviceClientBase,而 TProviderPtr 對應的是 CameraProviderManager,mDevice是Camera3Device物件,
呼叫TClientBase(CameraDeviceClientBase)的 startCameraOps 方法,檢查 ops 的權限;初始化Camera3Device;為Camera3Device設定Notify回呼,
Step3 mDevice->initialize
檔案:"frameworks/av/services/camera/libcameraservice/device3/Camera3Device.cpp"
status_t Camera3Device::initialize(sp<CameraProviderManager> manager, const String8& monitorTags) {
ATRACE_CALL();
Mutex::Autolock il(mInterfaceLock);
Mutex::Autolock l(mLock);
ALOGV("%s: Initializing HIDL device for camera %s", __FUNCTION__, mId.string());
if (mStatus != STATUS_UNINITIALIZED) {
CLOGE("Already initialized!");
return INVALID_OPERATION;
}
if (manager == nullptr) return INVALID_OPERATION;
sp<ICameraDeviceSession> session;
ATRACE_BEGIN("CameraHal::openSession");
// Step 4
status_t res = manager->openSession(mId.string(), this,
/*out*/ &session);
ATRACE_END();
if (res != OK) {
SET_ERR_L("Could not open camera session: %s (%d)", strerror(-res), res);
return res;
}
...
mInterface = new HalInterface(session, queue);
std::string providerType;
mVendorTagId = manager->getProviderTagIdLocked(mId.string());
mTagMonitor.initialize(mVendorTagId);
if (!monitorTags.isEmpty()) {
mTagMonitor.parseTagsToMonitor(String8(monitorTags));
}
return initializeCommonLocked();
}呼叫了CameraProviderManager的openSession方法,打開了一個遠端的Session,
Step4 openSession
檔案:"frameworks/av/services/camera/libcameraservice/common/CameraProviderManager.cpp"
status_t CameraProviderManager::openSession(const std::string &id,
const sp<hardware::camera::device::V3_2::ICameraDeviceCallback>& callback,
/*out*/
sp<hardware::camera::device::V3_2::ICameraDeviceSession> *session) {
std::lock_guard<std::mutex> lock(mInterfaceMutex);
// 根據id和version找到對應的CameraDevice3
// 4.1
auto deviceInfo = findDeviceInfoLocked(id,
/*minVersion*/ {3,0}, /*maxVersion*/ {4,0});
if (deviceInfo == nullptr) return NAME_NOT_FOUND;
auto *deviceInfo3 = static_cast<ProviderInfo::DeviceInfo3*>(deviceInfo);
Status status;
hardware::Return<void> ret;
// 其中mInterface是指Hal層的CameraDevice類, cameraSession等于CameraDevice3SessionImpl
// Step 5
ret = deviceInfo3->mInterface->open(callback, [&status, &session]
(Status s, const sp<device::V3_2::ICameraDeviceSession>& cameraSession) {
status = s;
if (status == Status::OK) {
*session = cameraSession;
}
});
if (!ret.isOk()) {
ALOGE("%s: Transaction error opening a session for camera device %s: %s",
__FUNCTION__, id.c_str(), ret.description().c_str());
return DEAD_OBJECT;
}
return mapToStatusT(status);
}首先呼叫 findDeviceInfoLocked,獲取 HAL3 相關的 DeviceInfo3,這個資訊在CameraService服務啟動與初始化的時候就已經創建出來并保存下來了,
然后通過hidl遠端呼叫CameraDevice的open 方法(todo hidl遠端呼叫具體怎么行程間通信的?),創建CameraDeviceSession實體并通過session回傳,DeviceInfo3這個類的mInterface成員型別是ICameraDevice,通過它可以呼叫遠端(Hal層)CameraDevice中的方法,
檔案:"frameworks/av/services/camera/libcameraservice/common/CameraProviderManager.h"
// HALv3-specific camera fields, including the actual device interface
struct DeviceInfo3 : public DeviceInfo {
typedef hardware::camera::device::V3_2::ICameraDevice InterfaceT;
const sp<InterfaceT> mInterface;
virtual status_t setTorchMode(bool enabled) override;
virtual status_t getCameraInfo(hardware::CameraInfo *info) const override;
virtual bool isAPI1Compatible() const override;
virtual status_t dumpState(int fd) const override;
virtual status_t getCameraCharacteristics(
CameraMetadata *characteristics) const override;
DeviceInfo3(const std::string& name, const metadata_vendor_id_t tagId,
const std::string &id, uint16_t minorVersion,
const hardware::camera::common::V1_0::CameraResourceCost& resourceCost,
sp<InterfaceT> interface);
virtual ~DeviceInfo3();
private:
CameraMetadata mCameraCharacteristics;
};Step5 open
檔案:"./hardware/interfaces/camera/device/3.2/default/CameraDevice.cpp"
Return<void> CameraDevice::open(const sp<ICameraDeviceCallback>& callback, open_cb _hidl_cb) {
Status status = initStatus();
sp<CameraDeviceSession> session = nullptr;
...
/** Open HAL device */
status_t res;
camera3_device_t *device;
ATRACE_BEGIN("camera3->open");
// 5.1
res = mModule->open(mCameraId.c_str(),
reinterpret_cast<hw_device_t**>(&device));
ATRACE_END();
...
struct camera_info info;
res = mModule->getCameraInfo(mCameraIdInt, &info);
if (res != OK) {
ALOGE("%s: Could not open camera: getCameraInfo failed", __FUNCTION__);
device->common.close(&device->common);
mLock.unlock();
_hidl_cb(Status::ILLEGAL_ARGUMENT, nullptr);
return Void();
}
// 5.2
session = createSession(
device, info.static_camera_characteristics, callback);
if (session == nullptr) {
ALOGE("%s: camera device session allocation failed", __FUNCTION__);
mLock.unlock();
_hidl_cb(Status::INTERNAL_ERROR, nullptr);
return Void();
}
...
mSession = session;
...
return Void();
}
sp<CameraDeviceSession> CameraDevice::createSession(camera3_device_t* device,
const camera_metadata_t* deviceInfo,
const sp<ICameraDeviceCallback>& callback) {
// 5.3
return new CameraDeviceSession(device, deviceInfo, callback);
}CameraDevice的實體是在初始化CameraProvider時初始化的(todo),這個函式主要做兩件事,一件事是通過mModule呼叫Camera HAL介面的open介面,mModule(CameraModule)是對Camera HAL的一層封裝;另一件事是創建session并讓mSession保存創建的session,
creatSession中直接創建了一個 CameraDeviceSession實體,
ICameraDevice.hal:./hardware/interfaces/camera/device/3.2/ICameraDevice.hal
ICameraDevice UML類圖如下:
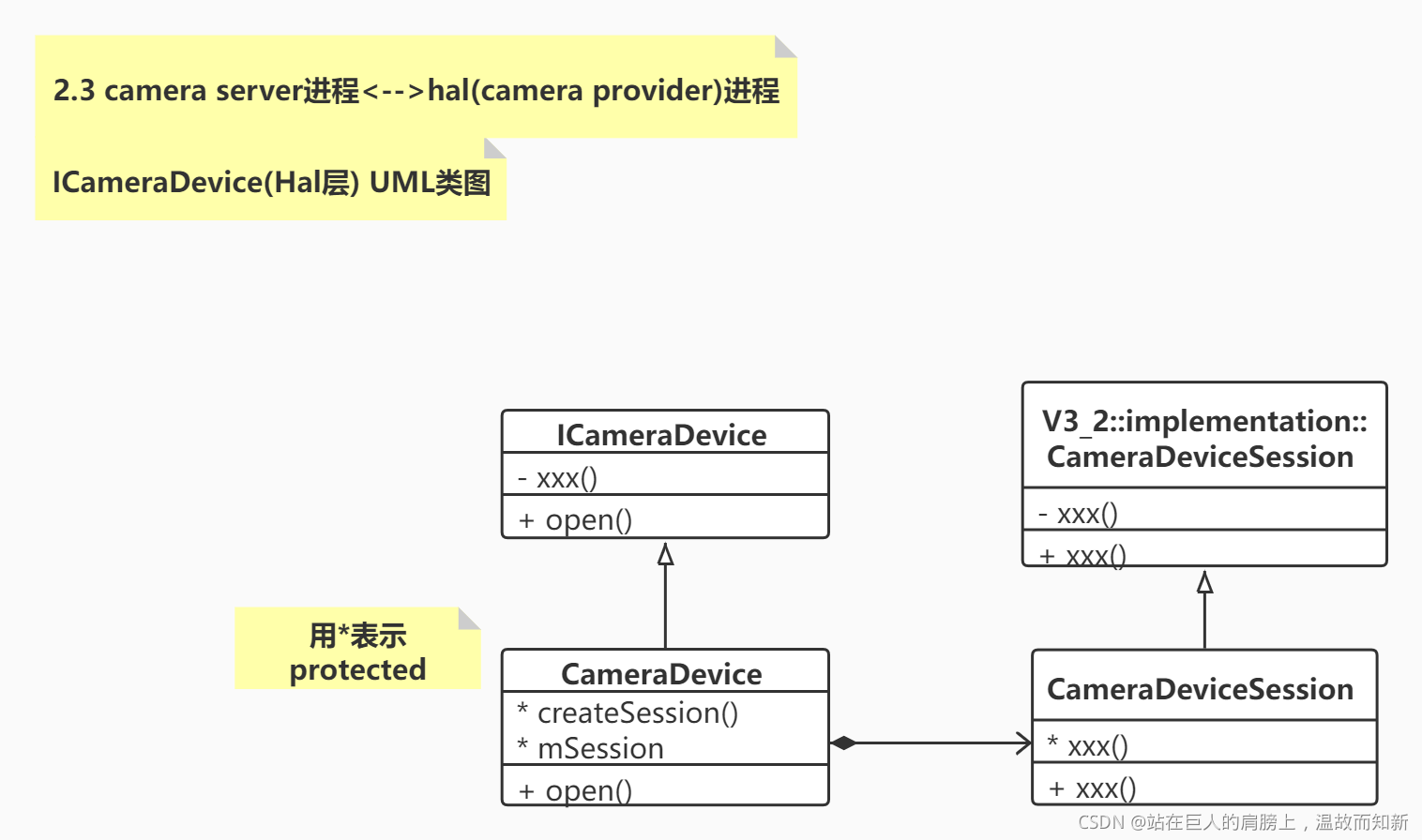
圖2-3-3 ICameraDevice UML類圖
2.4 camera hal分析
在 HAL3 中,Camera HAL的介面轉化層以及流決議層由QCamera3HardwareInterface負責,而介面層與實作層是在mm_camera_interface.c與mm_camera.c 中,下圖展示了Camera HAL初始化的主要呼叫流程:
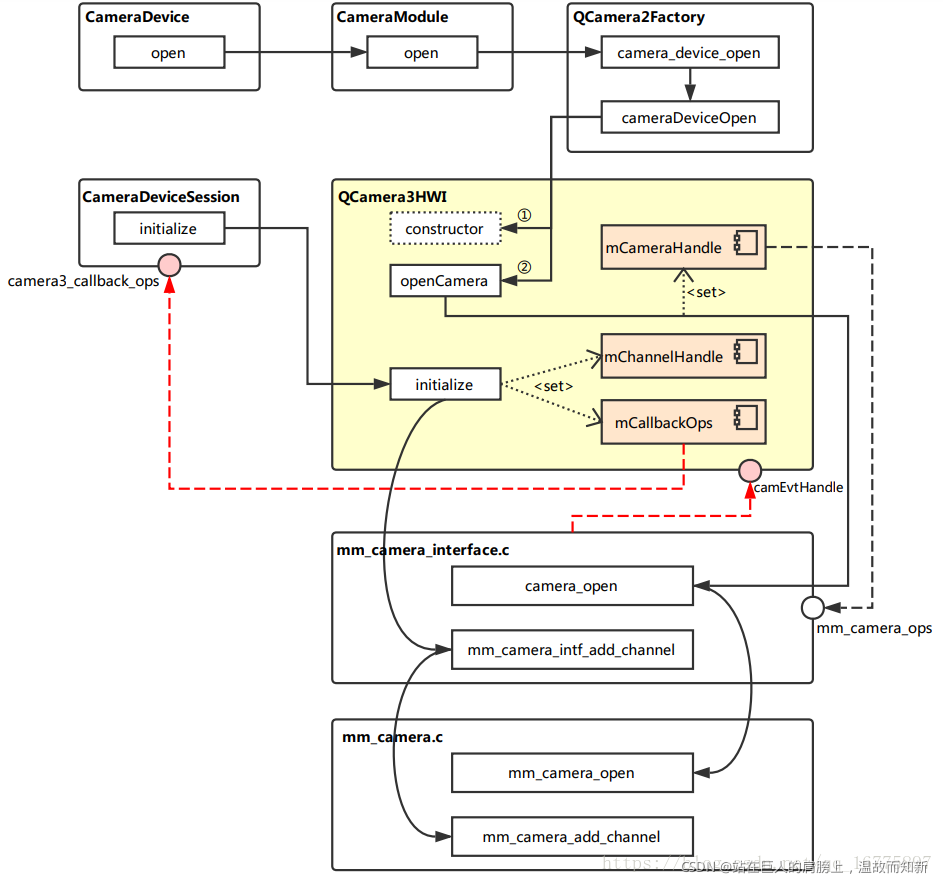
圖2-4-1 camera hal分析架構圖
下圖是camera hal分析UML順序圖:
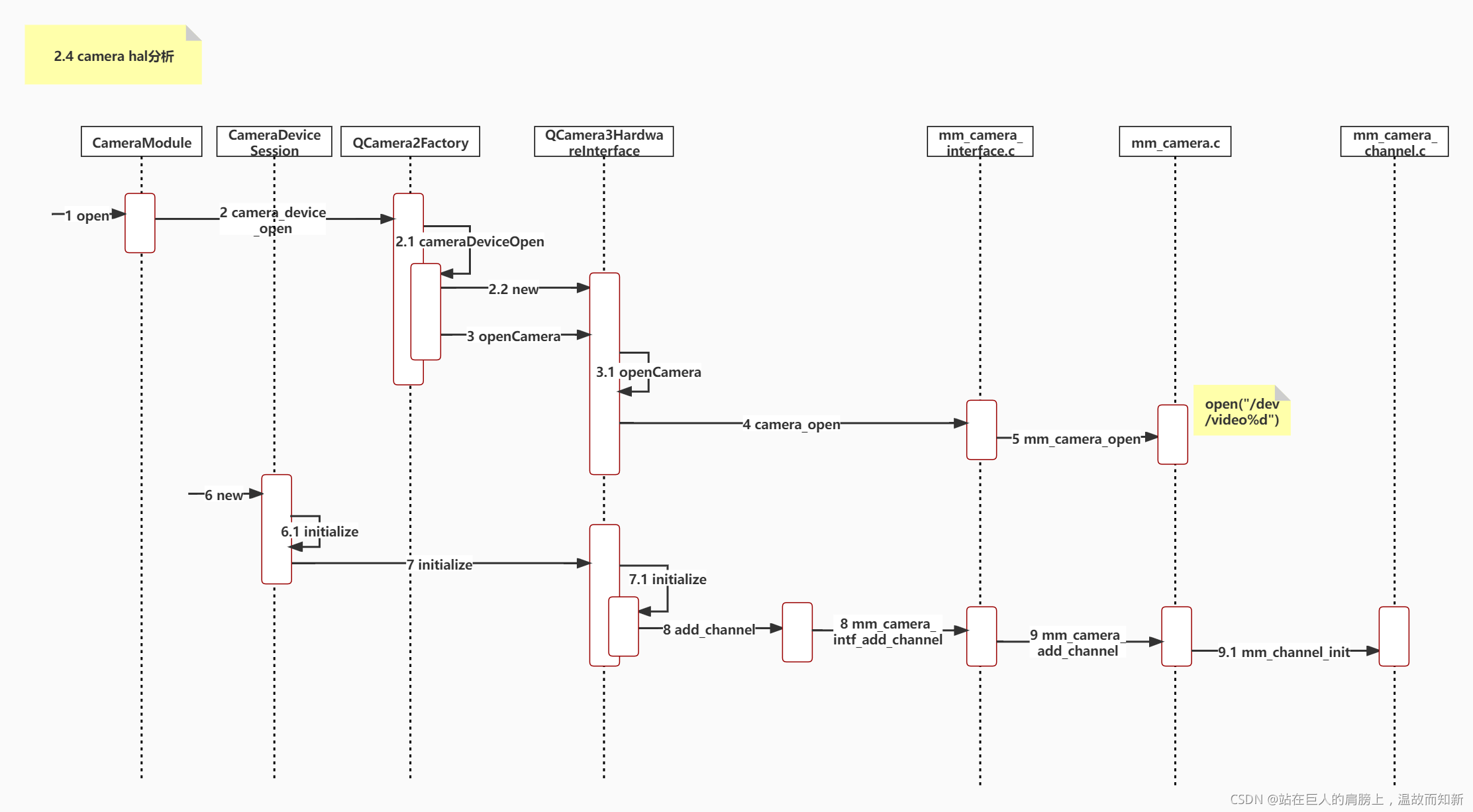
圖2-4-2 camera hal分析UML順序圖
Step1 open(2.3節(5.1))
檔案:"./hardware/interfaces/camera/common/1.0/default/CameraModule.cpp"
2.3節(5.1)講到呼叫了mModule->open,即CameraModule::open(),接著往下看:
int CameraModule::open(const char* id, struct hw_device_t** device) {
int res;
ATRACE_BEGIN("camera_module->open");
// Step 2
res = filterOpenErrorCode(mModule->common.methods->open(&mModule->common, id, device));
ATRACE_END();
return res;
}注意,mModule是camera_module型別,mModule是在建構式里賦值的,而CameraModule實體化是在CameraProvider實體化時(見2.1.1節(6.1.5)),
open 是一個函式指標,它指向的是QCamera2Factory的camera_device_open方法,分析如下:
先看下這些struct型別定義(camera_module, hw_module_t, hw_module_methods_t):
檔案:"hardware/libhardware/include/hardware/camera_common.h"
typedef struct camera_module {
/**
* Common methods of the camera module. This *must* be the first member of
* camera_module as users of this structure will cast a hw_module_t to
* camera_module pointer in contexts where it's known the hw_module_t
* references a camera_module.
*
* The return values for common.methods->open for camera_module are:
*
* 0: On a successful open of the camera device.
*
* -ENODEV: The camera device cannot be opened due to an internal
* error.
*
* -EINVAL: The input arguments are invalid, i.e. the id is invalid,
* and/or the module is invalid.
*
* -EBUSY: The camera device was already opened for this camera id
* (by using this method or open_legacy),
* regardless of the device HAL version it was opened as.
*
* -EUSERS: The maximal number of camera devices that can be
* opened concurrently were opened already, either by
* this method or the open_legacy method.
*
* All other return values from common.methods->open will be treated as
* -ENODEV.
*/
hw_module_t common;
...
}檔案:"hardware/libhardware/include/hardware/hardware.h"
typedef struct hw_module_t {
/** tag must be initialized to HARDWARE_MODULE_TAG */
uint32_t tag;
...
/** Identifier of module */
const char *id;
/** Name of this module */
const char *name;
/** Author/owner/implementor of the module */
const char *author;
/** Modules methods */
struct hw_module_methods_t* methods;
...
}
typedef struct hw_module_methods_t {
/** Open a specific device */
int (*open)(const struct hw_module_t* module, const char* id,
struct hw_device_t** device);
} hw_module_methods_t;hw_module_t中的成員是在QCamera2Hal.cpp賦值的,每個廠商不一樣,以qcom msm8998為例:
檔案:"hardware/qcom/camera/msm8998/QCamera2/QCamera2Hal.cpp"
static hw_module_t camera_common = {
.tag = HARDWARE_MODULE_TAG,
.module_api_version = CAMERA_MODULE_API_VERSION_2_4,
.hal_api_version = HARDWARE_HAL_API_VERSION,
.id = CAMERA_HARDWARE_MODULE_ID,
.name = "QCamera Module",
.author = "Qualcomm Innovation Center Inc",
.methods = &qcamera::QCamera2Factory::mModuleMethods,
.dso = NULL,
.reserved = {0}
};檔案:"./hardware/qcom/camera/msm8998/QCamera2/QCamera2Factory.cpp"
struct hw_module_methods_t QCamera2Factory::mModuleMethods = {
.open = QCamera2Factory::camera_device_open,
};注意,mModuleMethods是個static類成員變數,
可以得出結論:open指向的是 QCamera2Factory的camera_device_open方法,
Step2 camera_device_open
檔案:"./hardware/qcom/camera/msm8998/QCamera2/QCamera2Factory.cpp"
/*===========================================================================
* FUNCTION : camera_device_open
*
* DESCRIPTION: static function to open a camera device by its ID
*
* PARAMETERS :
* @camera_id : camera ID
* @hw_device : ptr to struct storing camera hardware device info
*
* RETURN : int32_t type of status
* NO_ERROR -- success
* none-zero failure code
*==========================================================================*/
int QCamera2Factory::camera_device_open(
const struct hw_module_t *module, const char *id,
struct hw_device_t **hw_device)
{
int rc = NO_ERROR;
if (module != &HAL_MODULE_INFO_SYM.common) {
LOGE("Invalid module. Trying to open %p, expect %p",
module, &HAL_MODULE_INFO_SYM.common);
return INVALID_OPERATION;
}
if (!id) {
LOGE("Invalid camera id");
return BAD_VALUE;
}
#ifdef QCAMERA_HAL1_SUPPORT
if(gQCameraMuxer)
rc = gQCameraMuxer->camera_device_open(module, id, hw_device);
else
#endif
// 2.1
rc = gQCamera2Factory->cameraDeviceOpen(atoi(id), hw_device);
return rc;
}
/*===========================================================================
* FUNCTION : cameraDeviceOpen
*
* DESCRIPTION: open a camera device with its ID
*
* PARAMETERS :
* @camera_id : camera ID
* @hw_device : ptr to struct storing camera hardware device info
*
* RETURN : int32_t type of status
* NO_ERROR -- success
* none-zero failure code
*==========================================================================*/
int QCamera2Factory::cameraDeviceOpen(int camera_id,
struct hw_device_t **hw_device)
{
int rc = NO_ERROR;
if (camera_id < 0 || camera_id >= mNumOfCameras)
return -ENODEV;
if ( NULL == mHalDescriptors ) {
LOGE("Hal descriptor table is not initialized!");
return NO_INIT;
}
LOGI("Open camera id %d API version %d",
camera_id, mHalDescriptors[camera_id].device_version);
if ( mHalDescriptors[camera_id].device_version == CAMERA_DEVICE_API_VERSION_3_0 ) {
CAMSCOPE_INIT(CAMSCOPE_SECTION_HAL);
// 2.2
QCamera3HardwareInterface *hw = new QCamera3HardwareInterface(mHalDescriptors[camera_id].cameraId,
mCallbacks);
if (!hw) {
LOGE("Allocation of hardware interface failed");
return NO_MEMORY;
}
// Step3
rc = hw->openCamera(hw_device);
if (rc != 0) {
delete hw;
}
}
...
}HAL3呼叫cameraDeviceOpen函式,創建QCamera3HardwareInterface實體,呼叫openCamera介面,
Step3 openCamera
檔案:"hardware/qcom/camera/msm8998/QCamera2/HAL3/QCamera3HWI.cpp"
/*===========================================================================
* FUNCTION : openCamera
*
* DESCRIPTION: open camera
*
* PARAMETERS :
* @hw_device : double ptr for camera device struct
*
* RETURN : int32_t type of status
* NO_ERROR -- success
* none-zero failure code
*==========================================================================*/
int QCamera3HardwareInterface::openCamera(struct hw_device_t **hw_device)
{
int rc = 0;
if (mState != CLOSED) {
*hw_device = NULL;
return PERMISSION_DENIED;
}
...
// 3.1
rc = openCamera();
if (rc == 0) {
*hw_device = &mCameraDevice.common;
} else {
*hw_device = NULL;
...
}
...
}
/*===========================================================================
* FUNCTION : openCamera
*
* DESCRIPTION: open camera
*
* PARAMETERS : none
*
* RETURN : int32_t type of status
* NO_ERROR -- success
* none-zero failure code
*==========================================================================*/
int QCamera3HardwareInterface::openCamera()
{
int rc = 0;
char value[PROPERTY_VALUE_MAX];
// Step 4
rc = camera_open((uint8_t)mCameraId, &mCameraHandle);
if (rc) {
LOGE("camera_open failed. rc = %d, mCameraHandle = %p", rc, mCameraHandle);
return rc;
}
if (!mCameraHandle) {
LOGE("camera_open failed. mCameraHandle = %p", mCameraHandle);
return -ENODEV;
}
rc = mCameraHandle->ops->register_event_notify(mCameraHandle->camera_handle,
camEvtHandle, (void *)this);
...
}openCamera的作業是從介面轉化層進入到介面層,openCamera成功后,將mCameraDevice.common通過雙重指標 hw_device 回傳,介面層是呼叫camera_open介面,并通過mCameraHandle注冊notify回呼,
Step4 camera_open
檔案:"./hardware/qcom/camera/msm8998/QCamera2/stack/mm-camera-interface/src/mm_camera_interface.c"
/*===========================================================================
* FUNCTION : camera_open
*
* DESCRIPTION: open a camera by camera index
*
* PARAMETERS :
* @camera_idx : camera index. should within range of 0 to num_of_cameras
* @camera_vtbl : ptr to a virtual table containing camera handle and operation table.
*
* RETURN : int32_t type of status
* 0 -- success
* non-zero error code -- failure
*==========================================================================*/
int32_t camera_open(uint8_t camera_idx, mm_camera_vtbl_t **camera_vtbl)
{
int32_t rc = 0;
mm_camera_obj_t *cam_obj = NULL;
uint32_t cam_idx = camera_idx;
uint32_t aux_idx = 0;
uint8_t is_multi_camera = 0;
...
// Step 5
rc = mm_camera_open(cam_obj);
if (rc != 0) {
LOGE("mm_camera_open err = %d", rc);
pthread_mutex_destroy(&cam_obj->cam_lock);
pthread_mutex_lock(&g_intf_lock);
g_cam_ctrl.cam_obj[cam_idx] = NULL;
free(cam_obj);
cam_obj = NULL;
pthread_mutex_unlock(&g_intf_lock);
*camera_vtbl = NULL;
return rc;
}
...
}進入介面層,呼叫mm_camera_open,
Step5 mm_camera_open
檔案:"hardware/qcom/camera/msm8998/QCamera2/stack/mm-camera-interface/src/mm_camera.c"
/*===========================================================================
* FUNCTION : mm_camera_open
*
* DESCRIPTION: open a camera
*
* PARAMETERS :
* @my_obj : ptr to a camera object
*
* RETURN : int32_t type of status
* 0 -- success
* -1 -- failure
*==========================================================================*/
int32_t mm_camera_open(mm_camera_obj_t *my_obj)
{
char dev_name[MM_CAMERA_DEV_NAME_LEN];
int32_t rc = 0;
int8_t n_try=MM_CAMERA_DEV_OPEN_TRIES;
uint8_t sleep_msec=MM_CAMERA_DEV_OPEN_RETRY_SLEEP;
int cam_idx = 0;
const char *dev_name_value = NULL;
int l_errno = 0;
LOGD("begin\n");
if (NULL == my_obj) {
goto on_error;
}
dev_name_value = mm_camera_util_get_dev_name_by_num(my_obj->my_num,
my_obj->my_hdl);
if (NULL == dev_name_value) {
goto on_error;
}
snprintf(dev_name, sizeof(dev_name), "/dev/%s",
dev_name_value);
sscanf(dev_name, "/dev/video%d", &cam_idx);
LOGD("dev name = %s, cam_idx = %d", dev_name, cam_idx);
do{
n_try--;
errno = 0;
my_obj->ctrl_fd = open(dev_name, O_RDWR | O_NONBLOCK);
l_errno = errno;
LOGD("ctrl_fd = %d, errno == %d", my_obj->ctrl_fd, l_errno);
if((my_obj->ctrl_fd >= 0) || (errno != EIO && errno != ETIMEDOUT) || (n_try <= 0 )) {
break;
}
LOGE("Failed with %s error, retrying after %d milli-seconds",
strerror(errno), sleep_msec);
usleep(sleep_msec * 1000U);
}while (n_try > 0);
...
LOGD("Launch evt Thread in Cam Open");
snprintf(my_obj->evt_thread.threadName, THREAD_NAME_SIZE, "CAM_Dispatch");
mm_camera_cmd_thread_launch(&my_obj->evt_thread,
mm_camera_dispatch_app_event,
(void *)my_obj);
/* launch event poll thread
* we will add evt fd into event poll thread upon user first register for evt */
LOGD("Launch evt Poll Thread in Cam Open");
snprintf(my_obj->evt_poll_thread.threadName, THREAD_NAME_SIZE, "CAM_evntPoll");
mm_camera_poll_thread_launch(&my_obj->evt_poll_thread,
MM_CAMERA_POLL_TYPE_EVT);
mm_camera_evt_sub(my_obj, TRUE);
...
}打開camera設備檔案open("/dev/video%d",...),并起事件執行緒,
Step6 new CameraDeviceSession((2.3節(5.3)))
檔案:"./hardware/interfaces/camera/device/3.2/default/CameraDeviceSession.cpp"
2.3節分析過,呼叫CameraModule的open介面后會創建CameraDeviceSession實體,繼續往下看,這里會呼叫QCamera3HWI的初始化方法 initialize,
CameraDeviceSession::CameraDeviceSession(
camera3_device_t* device,
const camera_metadata_t* deviceInfo,
const sp<ICameraDeviceCallback>& callback) :
camera3_callback_ops({&sProcessCaptureResult, &sNotify}),
mDevice(device),
mDeviceVersion(device->common.version),
mIsAELockAvailable(false),
mDerivePostRawSensKey(false),
mNumPartialResults(1),
mResultBatcher(callback) {
mDeviceInfo = deviceInfo;
camera_metadata_entry partialResultsCount =
mDeviceInfo.find(ANDROID_REQUEST_PARTIAL_RESULT_COUNT);
if (partialResultsCount.count > 0) {
mNumPartialResults = partialResultsCount.data.i32[0];
}
mResultBatcher.setNumPartialResults(mNumPartialResults);
camera_metadata_entry aeLockAvailableEntry = mDeviceInfo.find(
ANDROID_CONTROL_AE_LOCK_AVAILABLE);
...
// 6.1
mInitFail = initialize();
}
bool CameraDeviceSession::initialize() {
/** Initialize device with callback functions */
ATRACE_BEGIN("camera3->initialize");
// Step7
status_t res = mDevice->ops->initialize(mDevice, this);
ATRACE_END();
if (res != OK) {
ALOGE("%s: Unable to initialize HAL device: %s (%d)",
__FUNCTION__, strerror(-res), res);
mDevice->common.close(&mDevice->common);
mClosed = true;
return true;
}
...
}檔案:"hardware/libhardware/include/hardware/camera3.h"
/**********************************************************************
*
* Camera device definition
*
*/
typedef struct camera3_device {
/**
* common.version must equal CAMERA_DEVICE_API_VERSION_3_0 to identify this
* device as implementing version 3.0 of the camera device HAL.
*
* Performance requirements:
*
* Camera open (common.module->common.methods->open) should return in 200ms, and must return
* in 500ms.
* Camera close (common.close) should return in 200ms, and must return in 500ms.
*
*/
hw_device_t common;
camera3_device_ops_t *ops;
void *priv;
} camera3_device_t;
/**********************************************************************
*
* Camera device operations
*
*/
typedef struct camera3_device_ops {
/**
* initialize:
*
* One-time initialization to pass framework callback function pointers to
* the HAL. Will be called once after a successful open() call, before any
* other functions are called on the camera3_device_ops structure.
*
* Performance requirements:
*
* This should be a non-blocking call. The HAL should return from this call
* in 5ms, and must return from this call in 10ms.
*
* Return values:
*
* 0: On successful initialization
*
* -ENODEV: If initialization fails. Only close() can be called successfully
* by the framework after this.
*/
int (*initialize)(const struct camera3_device *,
const camera3_callback_ops_t *callback_ops);
...
} camera3_device_ops_t;可以看出mDevice是camera3_device_t*型別,ops是camera3_device_ops_t*型別,initialize是在哪里賦值的呢?
檔案:"./device/google/marlin/camera/QCamera2/HAL3/QCamera3HWI.cpp"
camera3_device_ops_t QCamera3HardwareInterface::mCameraOps = {
.initialize = QCamera3HardwareInterface::initialize,
.configure_streams = QCamera3HardwareInterface::configure_streams,
.register_stream_buffers = NULL,
.construct_default_request_settings = QCamera3HardwareInterface::construct_default_request_settings,
.process_capture_request = QCamera3HardwareInterface::process_capture_request,
.get_metadata_vendor_tag_ops = NULL,
.dump = QCamera3HardwareInterface::dump,
.flush = QCamera3HardwareInterface::flush,
.reserved = {0},
};所以最后呼叫到了QCamera3HardwareInterface::initialize這個靜態函式,
Step7 initialize
檔案:"./device/google/marlin/camera/QCamera2/HAL3/QCamera3HWI.cpp"
/*===========================================================================
* FUNCTION : initialize
*
* DESCRIPTION: Pass framework callback pointers to HAL
*
* PARAMETERS :
*
*
* RETURN : Success : 0
* Failure: -ENODEV
*==========================================================================*/
int QCamera3HardwareInterface::initialize(const struct camera3_device *device,
const camera3_callback_ops_t *callback_ops)
{
LOGD("E");
QCamera3HardwareInterface *hw =
reinterpret_cast<QCamera3HardwareInterface *>(device->priv);
if (!hw) {
LOGE("NULL camera device");
return -ENODEV;
}
// 7.1
int rc = hw->initialize(callback_ops);
LOGD("X");
return rc;
}
/*===========================================================================
* FUNCTION : initialize
*
* DESCRIPTION: Initialize frameworks callback functions
*
* PARAMETERS :
* @callback_ops : callback function to frameworks
*
* RETURN :
*
*==========================================================================*/
int QCamera3HardwareInterface::initialize(
const struct camera3_callback_ops *callback_ops)
{
ATRACE_CALL();
int rc;
LOGI("E :mCameraId = %d mState = %d", mCameraId, mState);
pthread_mutex_lock(&mMutex);
// Validate current state
switch (mState) {
case OPENED:
/* valid state */
break;
default:
LOGE("Invalid state %d", mState);
rc = -ENODEV;
goto err1;
}
rc = initParameters();
if (rc < 0) {
LOGE("initParamters failed %d", rc);
goto err1;
}
mCallbackOps = callback_ops;
// Step8
mChannelHandle = mCameraHandle->ops->add_channel(
mCameraHandle->camera_handle, NULL, NULL, this);
if (mChannelHandle == 0) {
LOGE("add_channel failed");
rc = -ENOMEM;
pthread_mutex_unlock(&mMutex);
return rc;
}
pthread_mutex_unlock(&mMutex);
mCameraInitialized = true;
mState = INITIALIZED;
LOGI("X");
return 0;
err1:
pthread_mutex_unlock(&mMutex);
return rc;
}進入介面轉化層QCamera3HardwareInterface,注意,callback_ops回呼指標是指CameraDeviceSession實體地址,用mCallbackOps保存回呼指標,通過mCameraHandle->ops->add_channel進入介面層mm_camera_interface,呼叫的方法實際是 mm_camera_interface.c 中的mm_camera_intf_add_channel,
檔案:"hardware/qcom/camera/msm8998/QCamera2/stack/common/mm_camera_interface.h"
/** mm_camera_vtbl_t: virtual table for camera operations
* @camera_handle : camera handler which uniquely identifies a
* camera object
* @ops : API call table
**/
typedef struct {
uint32_t camera_handle;
mm_camera_ops_t *ops;
} mm_camera_vtbl_t;
typedef struct {
...
/** add_channel: fucntion definition for adding a channel
* @camera_handle : camer handler
* @ch_id : channel handler
* @attr : pointer to channel attribute structure
* @channel_cb : callbak to handle bundled super buffer
* @userdata : user data pointer
* Return value: channel id, zero is invalid ch_id
* Note: attr, channel_cb, and userdata can be NULL if no
* superbufCB is needed
**/
uint32_t (*add_channel) (uint32_t camera_handle,
mm_camera_channel_attr_t *attr,
mm_camera_buf_notify_t channel_cb,
void *userdata);
...
} mm_camera_ops_t;可以看到mCameraHandle的型別為mm_camera_vtbl_t *,mCameraHandle->ops的型別為mm_camera_ops_t*,
檔案:"hardware/qcom/camera/msm8998/QCamera2/stack/mm-camera-interface/src/mm_camera_interface.c"
/* camera ops v-table */
static mm_camera_ops_t mm_camera_ops = {
.query_capability = mm_camera_intf_query_capability,
.register_event_notify = mm_camera_intf_register_event_notify,
.close_camera = mm_camera_intf_close,
.set_parms = mm_camera_intf_set_parms,
.get_parms = mm_camera_intf_get_parms,
.do_auto_focus = mm_camera_intf_do_auto_focus,
.cancel_auto_focus = mm_camera_intf_cancel_auto_focus,
.prepare_snapshot = mm_camera_intf_prepare_snapshot,
.start_zsl_snapshot = mm_camera_intf_start_zsl_snapshot,
.stop_zsl_snapshot = mm_camera_intf_stop_zsl_snapshot,
.map_buf = mm_camera_intf_map_buf,
.map_bufs = mm_camera_intf_map_bufs,
.unmap_buf = mm_camera_intf_unmap_buf,
.add_channel = mm_camera_intf_add_channel,
...
}可以看到,最后呼叫到mm_camera_interface.c檔案的mm_camera_intf_add_channel介面,
Step8 add_channel
檔案:"hardware/qcom/camera/msm8998/QCamera2/stack/mm-camera-interface/src/mm_camera_interface.c"
/*===========================================================================
* FUNCTION : mm_camera_intf_add_channel
*
* DESCRIPTION: add a channel
*
* PARAMETERS :
* @camera_handle: camera handle
* @attr : bundle attribute of the channel if needed
* @channel_cb : callback function for bundle data notify
* @userdata : user data ptr
*
* RETURN : uint32_t type of channel handle
* 0 -- invalid channel handle, meaning the op failed
* >0 -- successfully added a channel with a valid handle
* NOTE : if no bundle data notify is needed, meaning each stream in the
* channel will have its own stream data notify callback, then
* attr, channel_cb, and userdata can be NULL. In this case,
* no matching logic will be performed in channel for the bundling.
*==========================================================================*/
static uint32_t mm_camera_intf_add_channel(uint32_t camera_handle,
mm_camera_channel_attr_t *attr,
mm_camera_buf_notify_t channel_cb,
void *userdata)
{
uint32_t ch_id = 0, aux_ch_id = 0;
mm_camera_obj_t * my_obj = NULL;
uint32_t handle = get_main_camera_handle(camera_handle);
uint32_t aux_handle = get_aux_camera_handle(camera_handle);
LOGD("E camera_handler = %d", camera_handle);
if (handle) {
pthread_mutex_lock(&g_intf_lock);
my_obj = mm_camera_util_get_camera_by_handler(handle);
if(my_obj) {
pthread_mutex_lock(&my_obj->cam_lock);
pthread_mutex_unlock(&g_intf_lock);
// Step9
ch_id = mm_camera_add_channel(my_obj, attr, channel_cb, userdata);
} else {
pthread_mutex_unlock(&g_intf_lock);
}
}
...
LOGH("camera_handle = %u ch_id = %u X", camera_handle, ch_id);
return ch_id;
}通過呼叫實作層的 mm_camera_add_channel 來獲取一個 ch_id,
Step9 mm_camera_add_channel
檔案:"hardware/qcom/camera/msm8998/QCamera2/stack/mm-camera-interface/src/mm_camera.c"
/*===========================================================================
* FUNCTION : mm_camera_add_channel
*
* DESCRIPTION: add a channel
*
* PARAMETERS :
* @my_obj : camera object
* @attr : bundle attribute of the channel if needed
* @channel_cb : callback function for bundle data notify
* @userdata : user data ptr
*
* RETURN : uint32_t type of channel handle
* 0 -- invalid channel handle, meaning the op failed
* >0 -- successfully added a channel with a valid handle
* NOTE : if no bundle data notify is needed, meaning each stream in the
* channel will have its own stream data notify callback, then
* attr, channel_cb, and userdata can be NULL. In this case,
* no matching logic will be performed in channel for the bundling.
*==========================================================================*/
uint32_t mm_camera_add_channel(mm_camera_obj_t *my_obj,
mm_camera_channel_attr_t *attr,
mm_camera_buf_notify_t channel_cb,
void *userdata)
{
mm_channel_t *ch_obj = NULL;
uint8_t ch_idx = 0;
uint32_t ch_hdl = 0;
for(ch_idx = 0; ch_idx < MM_CAMERA_CHANNEL_MAX; ch_idx++) {
if (MM_CHANNEL_STATE_NOTUSED == my_obj->ch[ch_idx].state) {
ch_obj = &my_obj->ch[ch_idx];
break;
}
}
if (NULL != ch_obj) {
/* initialize channel obj */
memset(ch_obj, 0, sizeof(mm_channel_t));
ch_hdl = mm_camera_util_generate_handler_by_num(my_obj->my_num, ch_idx);
ch_obj->my_hdl = ch_hdl;
ch_obj->state = MM_CHANNEL_STATE_STOPPED;
ch_obj->cam_obj = my_obj;
pthread_mutex_init(&ch_obj->ch_lock, NULL);
ch_obj->sessionid = my_obj->sessionid;
// 9.1
mm_channel_init(ch_obj, attr, channel_cb, userdata);
}
pthread_mutex_unlock(&my_obj->cam_lock);
return ch_hdl;
}先找出狀態為NOTUSED的通道channel,再進行通道channel初始化,
檔案:"hardware/qcom/camera/msm8998/QCamera2/stack/mm-camera-interface/src/mm_camera_channel.c"
/*===========================================================================
* FUNCTION : mm_channel_init
*
* DESCRIPTION: initialize a channel
*
* PARAMETERS :
* @my_obj : channel object be to initialized
* @attr : bundle attribute of the channel if needed
* @channel_cb : callback function for bundle data notify
* @userdata : user data ptr
*
* RETURN : int32_t type of status
* 0 -- success
* -1 -- failure
* NOTE : if no bundle data notify is needed, meaning each stream in the
* channel will have its own stream data notify callback, then
* attr, channel_cb, and userdata can be NULL. In this case,
* no matching logic will be performed in channel for the bundling.
*==========================================================================*/
int32_t mm_channel_init(mm_channel_t *my_obj,
mm_camera_channel_attr_t *attr,
mm_camera_buf_notify_t channel_cb,
void *userdata)
{
int32_t rc = 0;
my_obj->bundle.super_buf_notify_cb = channel_cb;
my_obj->bundle.user_data = userdata;
if (NULL != attr) {
my_obj->bundle.superbuf_queue.attr = *attr;
}
my_obj->num_s_cnt = 0;
memset(&my_obj->frame_sync, 0, sizeof(my_obj->frame_sync));
pthread_mutex_init(&my_obj->frame_sync.sync_lock, NULL);
mm_muxer_frame_sync_queue_init(&my_obj->frame_sync.superbuf_queue);
my_obj->bundle.is_cb_active = 1;
LOGD("Launch data poll thread in channel open");
snprintf(my_obj->poll_thread[0].threadName, THREAD_NAME_SIZE, "CAM_dataPoll");
mm_camera_poll_thread_launch(&my_obj->poll_thread[0],
MM_CAMERA_POLL_TYPE_DATA);
/* change state to stopped state */
my_obj->state = MM_CHANNEL_STATE_STOPPED;
return rc;
}轉載請註明出處,本文鏈接:https://www.uj5u.com/yidong/333835.html
標籤:其他