文章目錄
- 1 先說噪聲
- 2 噪聲對于系統的影響
- 3 對于PID控制器的影響
- 4 加入濾波器
- 4.1 傳遞函式
- 4.2 串聯微分的等效形式反饋積分
- 5 C語言實作
- 6 參考
1 先說噪聲
在電子設備等電路系統中,噪聲是不被系統需要的電信號;電子設備產生的噪聲會由于多種不同的影響而產生很大的差異,
在通信系統中,噪聲是一個錯誤或不希望出現的隨機干擾從而作用于有效的信號,
2 噪聲對于系統的影響
噪聲出現的第一個場景,當我們在教室里做英語聽力,然后旁邊的同學手機忽然來了一條短信,這時候往往可以聽到放英語聽力的喇叭會被干擾,然后會發出嗶嗶嗶的聲音;
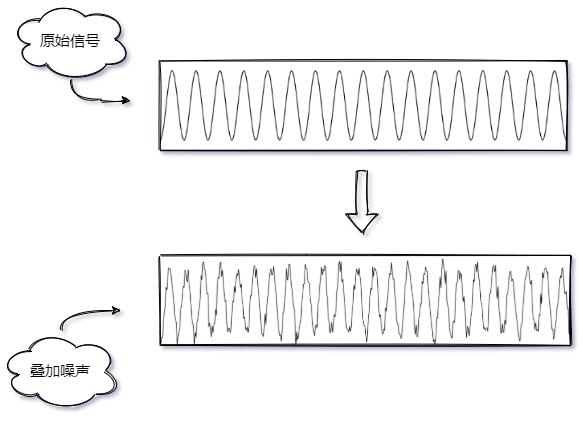
下面是一個正弦信號跌加噪聲的例子,在原始信號上疊加一定幅度的高斯噪聲,可以看到信號不再像原來的正弦信號那樣完美,具體如下圖所示;
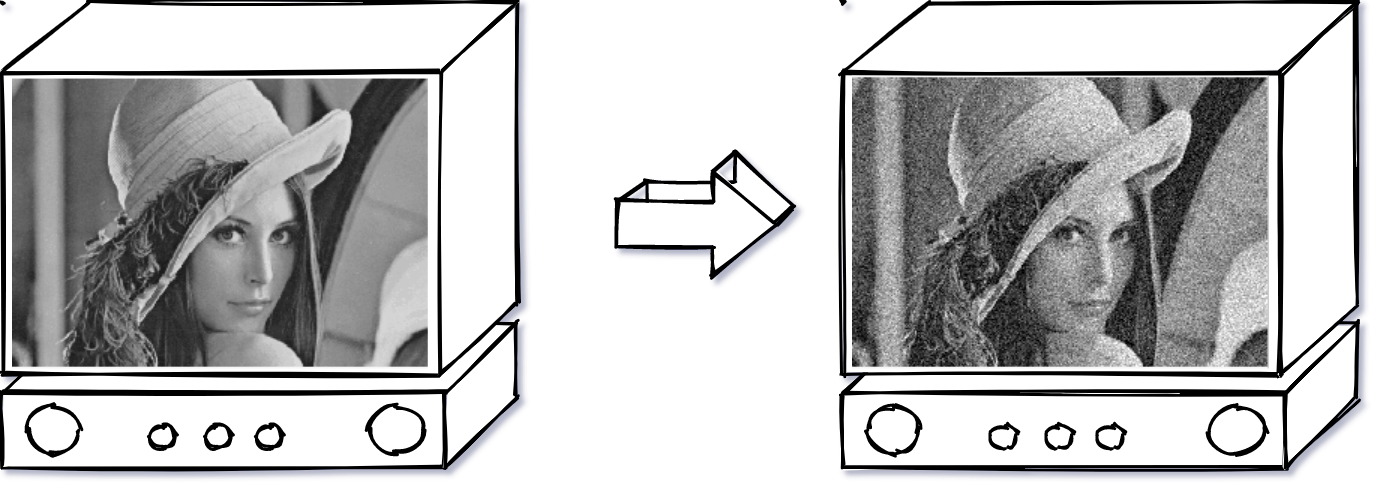
或者,很久很久以前,數字電視還沒有普及,那時候的顯像管的黑白電視,也容易出現這樣的雪花一樣的噪聲,疊加在圖片上就會出現這樣的效果,具體如下圖所示;
從上述的例子中可以看到,噪聲往往會對系統造成一定程度的影響,但是如果噪聲的幅度減小到一定程度,對于系統的影響可能就沒有那么容易被發現,
下面做一個實驗;
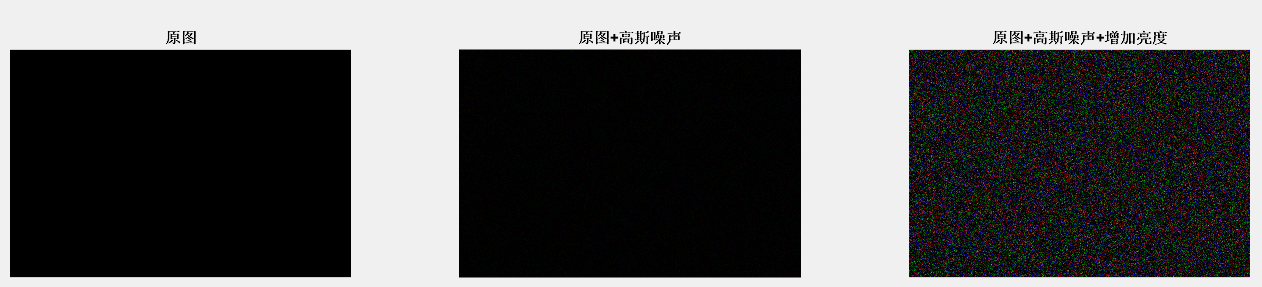
在一張黑色圖片上疊加幅度很小幅度的高斯噪聲;從第二張圖片中發現噪聲沒有影響到整體圖片;
然后我嘗試提高了整幅圖片的亮度,發現,噪點便開始出來了,這像極平時那些槍版影片的馬賽克畫質;
整體的實驗結果如下圖所示;
3 對于PID控制器的影響
既然噪聲的幅度減小到一定程度,對于系統的影響可能就沒有那么容易被發現,那么對理想的PID控制器又有什么影響呢?
不要忘了,在理想PID控制器中,微分控制器會對偏差的變化率(斜率)進行累加,從而產生積分器的輸出;
對于微分器來說,即使噪聲幅度足夠小,但是只要達到足夠高頻率,偏差的變化率一樣可以變得很大,下面舉個例子;
這里有一個固定頻率
f
f
f和賦值
A
A
A的噪聲為信號1,這個信號可以表示為:
X
1
(
t
)
=
A
s
i
n
(
2
π
f
t
)
X_1(t) = Asin(2\pi f t)
X1?(t)=Asin(2πft)
于是我們嘗試將信號1的幅度減半,頻率變為原來的兩倍,得到了信號2:
X
2
(
t
)
=
A
2
s
i
n
(
2
π
2
f
t
)
X_2(t) = \cfrac{A}{2} sin(2\pi 2f t)
X2?(t)=2A?sin(2π2ft)
以此類推,在信號2的基礎上,幅度再減半,頻率乘以2,得到信號3:
X
3
(
t
)
=
A
4
s
i
n
(
2
π
4
f
t
)
X_3(t) = \cfrac{A}{4} sin(2\pi 4f t)
X3?(t)=4A?sin(2π4ft)
簡單畫了一下這個信號,具體如下圖所示;
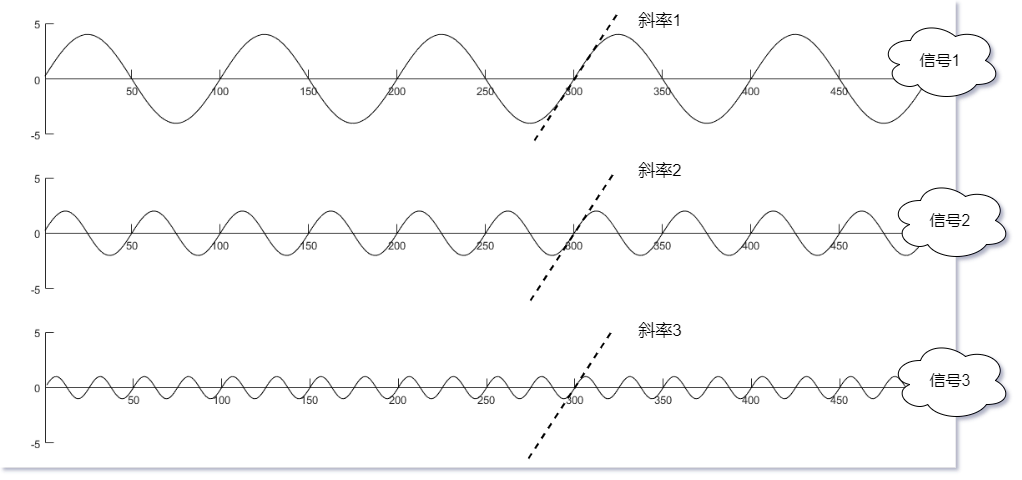
假設分別取三個信號位于 t 0 t_0 t0?該點的斜率,從圖中可以看到,斜率1,斜率2,斜率3是相同的,簡單驗證一下,在 t 0 t_0 t0?時刻,可以得到:
{
D
1
=
d
X
1
(
t
)
d
t
D
2
=
d
X
2
(
t
)
d
t
D
3
=
d
X
3
(
t
)
d
t
\begin{cases}D_1 = \cfrac{dX_1(t)}{dt} \\ \\ D_2 = \cfrac{dX_2(t)}{dt} \\ \\ D_3 = \cfrac{dX_3(t)}{dt} \\ \end{cases}
????????????????????????D1?=dtdX1?(t)?D2?=dtdX2?(t)?D3?=dtdX3?(t)??
所以這里就是求復合函式的微分,由于選取的點比較特殊,發現最終計算得到的結果
D
1
=
D
2
=
D
3
D_1 = D_2 = D_3
D1?=D2?=D3?,因此也可以發現,即使減小了噪聲的幅度,但是對于較高頻率的噪聲,依然會產生較大斜率,
遇到高頻噪聲,那么微分器會產生較大的輸出,從而最終對系統造成影響,這是我們不希望出現的結果,因此在反饋回路中并不希望高頻噪聲進入PID控制器的計算,這里就需要低通濾波器將噪聲濾除,
4 加入濾波器
低通濾波器可以濾除高頻信號,這樣保留了有效信號,可以設定所需的截止頻率;
系統處理有效信號,由于低頻部分信噪比較高,因此噪聲對于系統的影響較小,而高頻部分,信噪比就很低,這時候對于系統來說,噪聲就會造成不小的影響,具體如下圖所示;
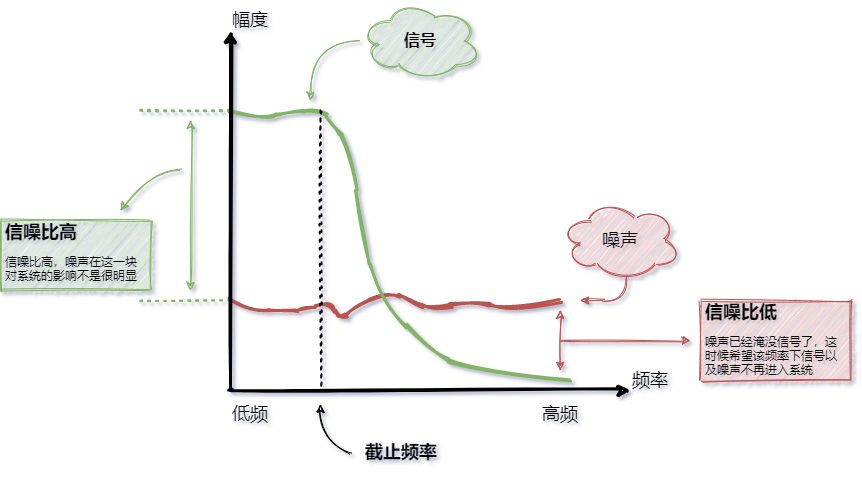
信噪比:有效信號和噪聲的比值,英文名稱叫做SNR或S/N(SIGNAL-NOISE RATIO);
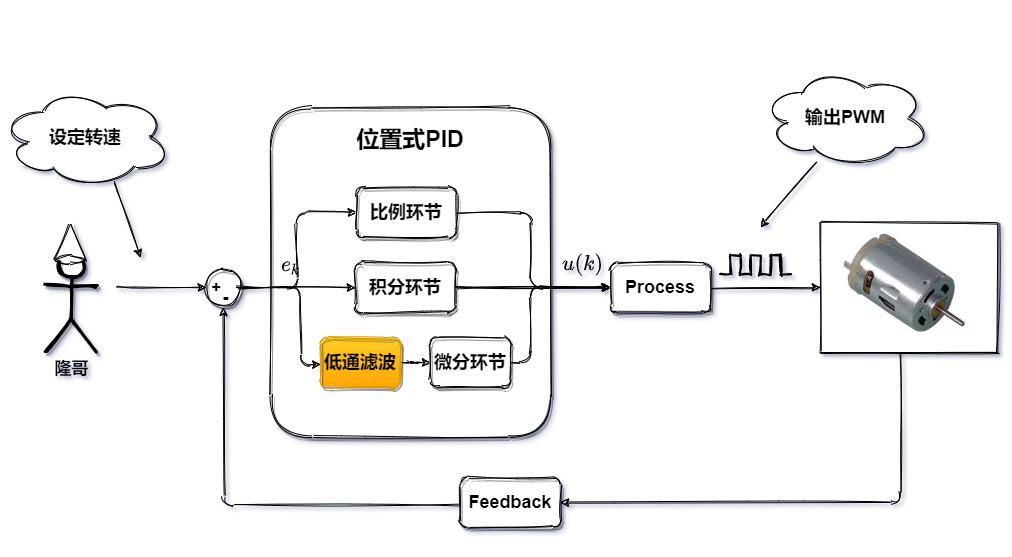
所以下面我們會在PID控制器的微分部分加入低通濾波器,這樣對反饋的信號進行一部分處理,從而減小系統干擾,如下圖所示;
4.1 傳遞函式
概念:拉普拉斯變換是對于 t > = 0 t>=0 t>=0 函式值不為零的連續時間函式 x ( t ) x(t) x(t) 通過關系式 (式中 ? s t -st ?st為自然對數底 e e e的指數)變換為復變數 s s s的函式 X ( s ) X(s) X(s),它也是時間函式 x ( t ) x(t) x(t)的“復頻域”表示方式,
也就是說拉式變換可以將時域關系變換到頻域中,這樣可以便于系統進行分析,
下面是本文下面會用到的時域函式對應的拉普拉斯變換:
- 積分: 1 s \cfrac{1}{s} s1?
- 微分: s s s
- 低通濾波器的傳遞函式: N s + N \cfrac{N}{s+N} s+NN?
低通濾波器中的截止頻率即為 N N N,單位是 r a d / s rad/s rad/s;
4.2 串聯微分的等效形式反饋積分
串聯等效傳遞函式的關系為,兩個方框串聯等于各個方框傳遞函式的乘積;
具體如下所示;
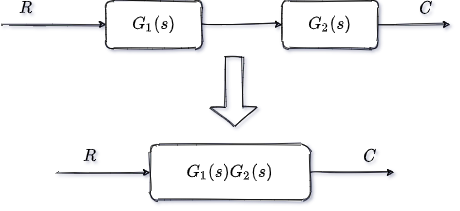
因此低通濾波串聯微分的傳遞函式為:
s
N
s
+
N
\cfrac{sN}{s+N}
s+NsN?
倍訓負反饋的等效傳遞函式的關系如下所示;
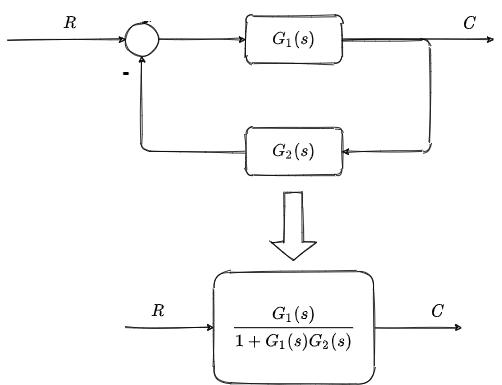
這里我們可以使用負反饋積分的方式,構建等效于串聯微分的傳遞函式,最終的傳遞函式結果是相同的,具體如下圖所示;
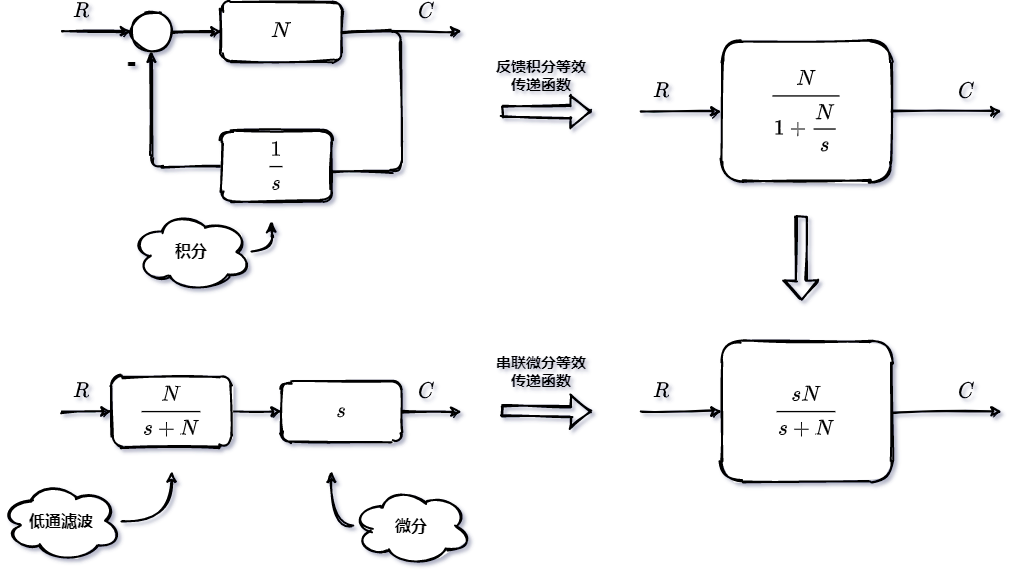
串聯微分的形式,可能在演算法的實作上會更加直觀,但是會比較費資源;
使用負反饋積分的等效形式進行實作,則進一步減少了演算法的資源消耗,下面給出一個TI公司的PID演算法實作就是通過負反饋積分的等效形式進行實作的,
5 C語言實作
這里直接使用了TI公司的PID演算法,對于微分部分做了濾波的處理,并且使用的是負反饋積分的方式,
具體可以參考controlSUITE\libs\app_libs\motor_control\math_blocks\v4.2\pid_grando.h
PID控制器的整體框圖如下所示,我們只關心微分部分;
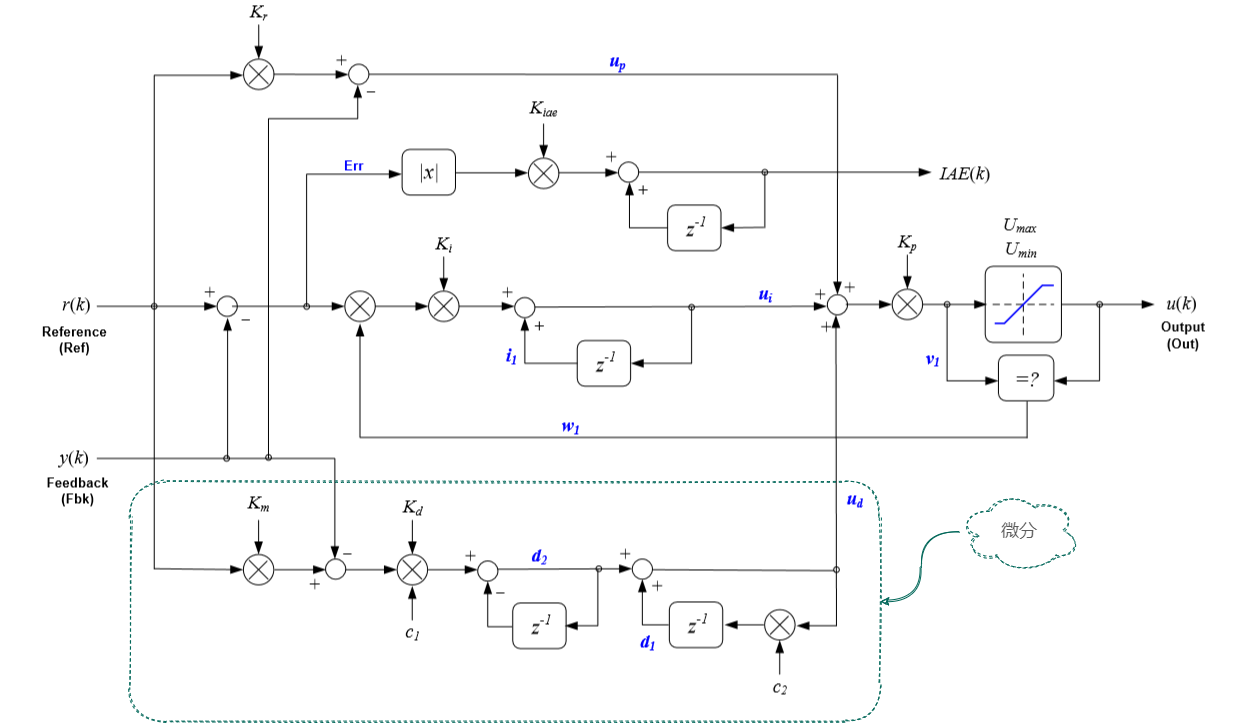
首先可以發現
u
d
u_d
ud?滿足:
u
d
(
k
)
=
K
d
[
c
2
u
i
(
k
?
1
)
+
c
1
e
(
k
)
?
c
1
e
(
k
?
1
)
]
u_d(k) = K_d\Big[c_2u_i(k-1)+c_1e(k)-c_1e(k-1) \Big]
ud?(k)=Kd?[c2?ui?(k?1)+c1?e(k)?c1?e(k?1)]
這里濾波器有兩個系數
c
1
c_1
c1?和
c
2
c_2
c2?,它們必須滿足截止頻率
a
a
a(單位Hz)和采樣周期
T
T
T(單位秒)以下的關系:
{
c
1
=
a
c
2
=
1
?
c
1
T
\begin{cases}c_1 = a\\ c_2 = 1-c_1T \end{cases}
{c1?=ac2?=1?c1?T?
C語言實作如下:
/* =================================================================================
File name: PID_GRANDO.H
===================================================================================*/
#ifndef __PID_H__
#define __PID_H__
typedef struct { _iq Ref; // Input: reference set-point
_iq Fbk; // Input: feedback
_iq Out; // Output: controller output
_iq c1; // Internal: derivative filter coefficient 1
_iq c2; // Internal: derivative filter coefficient 2
} PID_TERMINALS;
// note: c1 & c2 placed here to keep structure size under 8 words
typedef struct { _iq Kr; // Parameter: reference set-point weighting
_iq Kp; // Parameter: proportional loop gain
_iq Ki; // Parameter: integral gain
_iq Kd; // Parameter: derivative gain
_iq Km; // Parameter: derivative weighting
_iq Umax; // Parameter: upper saturation limit
_iq Umin; // Parameter: lower saturation limit
} PID_PARAMETERS;
typedef struct { _iq up; // Data: proportional term
_iq ui; // Data: integral term
_iq ud; // Data: derivative term
_iq v1; // Data: pre-saturated controller output
_iq i1; // Data: integrator storage: ui(k-1)
_iq d1; // Data: differentiator storage: ud(k-1)
_iq d2; // Data: differentiator storage: d2(k-1)
_iq w1; // Data: saturation record: [u(k-1) - v(k-1)]
} PID_DATA;
typedef struct { PID_TERMINALS term;
PID_PARAMETERS param;
PID_DATA data;
} PID_CONTROLLER;
/*-----------------------------------------------------------------------------
Default initalisation values for the PID objects
-----------------------------------------------------------------------------*/
#define PID_TERM_DEFAULTS { \
0, \
0, \
0, \
0, \
0 \
}
#define PID_PARAM_DEFAULTS { \
_IQ(1.0), \
_IQ(1.0), \
_IQ(0.0), \
_IQ(0.0), \
_IQ(1.0), \
_IQ(1.0), \
_IQ(-1.0) \
}
#define PID_DATA_DEFAULTS { \
_IQ(0.0), \
_IQ(0.0), \
_IQ(0.0), \
_IQ(0.0), \
_IQ(0.0), \
_IQ(0.0), \
_IQ(0.0), \
_IQ(1.0) \
}
/*------------------------------------------------------------------------------
PID Macro Definition
------------------------------------------------------------------------------*/
#define PID_MACRO(v) \
\
/* proportional term */ \
v.data.up = _IQmpy(v.param.Kr, v.term.Ref) - v.term.Fbk; \
\
/* integral term */ \
v.data.ui = _IQmpy(v.param.Ki, _IQmpy(v.data.w1, \
(v.term.Ref - v.term.Fbk))) + v.data.i1; \
v.data.i1 = v.data.ui; \
\
/* derivative term */ \
v.data.d2 = _IQmpy(v.param.Kd, _IQmpy(v.term.c1, \
(_IQmpy(v.term.Ref, v.param.Km) - v.term.Fbk))) - v.data.d2;\
v.data.ud = v.data.d2 + v.data.d1; \
v.data.d1 = _IQmpy(v.data.ud, v.term.c2); \
\
/* control output */ \
v.data.v1 = _IQmpy(v.param.Kp, \
(v.data.up + v.data.ui + v.data.ud)); \
v.term.Out= _IQsat(v.data.v1, v.param.Umax, v.param.Umin); \
v.data.w1 = (v.term.Out == v.data.v1) ? _IQ(1.0) : _IQ(0.0);\
#endif // __PID_H__
6 參考
https://en.wikipedia.org/wiki/Low-pass_filter
自動控制原理 第五版 胡壽松 P47
雖然寫的不一定是最好,但是每一個字、每一個公式都是用心碼的,每一張圖都是用心畫的,每一句話都是加入了自己的理解,如果幫到了你,請無情三連吧;另外筆者能力有限,文中難免存在錯誤和紕漏,望輕拍指正,
 CSDN認證博客專家
CSDN簽約作者
有夢想的咸魚
CSDN認證博客專家
CSDN簽約作者
有夢想的咸魚
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/111178.html
標籤:其他