文章目錄
- 本文解決的問題
- QR分解
- 投影矩陣分解得到內外參
- SVD分解
- 最小二乘問題
- 最小二乘問題的求解方法
- (列)滿秩最小二乘問題
- 正規化方法
- QR分解方法
- SVD 分解方法
- 虧秩最小二乘問題
- 齊次最小二乘問題
- 數值穩定性問題
- Ax=0與Ax=b的選擇
- 代碼實作
- 利用SVD求解非齊次線性方程組Ax=b
- 利用SVD求解齊次線性方程組Ax=0
- 附錄——一些概念
- 參考資料
在MVG(多視圖幾何)和機器學習領域,求解線性方程組幾乎是所有演算法的根本,本文旨在幫助讀者搞懂矩陣分解與線性方程組的關系,并給出利用SVD求解線性方程組的實戰代碼,
本文解決的問題
看完本文后,應解決以下問題:
-
投影矩陣怎么通過QR分解得到相機內外參?
-
求解非齊次線性方程組Ax=b的方法有哪些?
- 其他一些方法通用性不大,比如克萊姆法則只用于方陣,這里不考慮,
- 高斯消元法 | 常規方法,主要思路是講矩陣通過初等行變換,轉變為行階矩形,然后后向代入(或者稱為回代演算法)可以很容易求解,
- 根據增系數矩陣A和廣矩陣B = (A, b) 的秩可判斷解的個數,
- 對于齊次線性方程組Ax=0,用初等行變換將A變為行最簡形矩陣A’,即可得到同解方程組A’x=0,然后計算
- 對于非齊次線性方程組Ax=0,用初等行變換將增廣矩陣B = (A, b)變為行最簡形矩陣A’,即可得到同解方程組A’x=0,然后計算
- 方程Ax=b ,其中 A 為mxn,
- 當m >n時,對于這樣的方程不能直接利用高斯或者其他的分解法進行求解 , 往往需要把方程轉換為另外一種更容易求解的模式,也就是我們常常說的各種分解,
- 當m<n時,有無窮解,高斯消元等常規方法能解,但是如果我們要求使得二范數最小的最小二乘解,還是需要用SVD分解,
- 當m=n時,一般可以用高斯消元等方法解,但是如果秩小于n,此時有無窮解,如果我們要求使得二范數最小的最小二乘解,還是需要用SVD分解,
- 通過分解,將矩陣分解為特殊的形式,這些形式求逆或者對方程求解比較簡單,比如上三角矩陣、下三角矩陣、對角矩陣、正交矩陣(求逆簡單,就是其轉職),分解完后,方程可以轉換為比較好求解的形式,用常規方法求解即可,常用方法有:LU分解、QR分解、Cholesky分解
- 通過分解,求出矩陣廣義逆矩陣 A + A^+ A+ ,則解為 x = A + b x = A^+b x=A+b ,常用方法:正規方程( x = ( A T A ) ? 1 A T b x = (A^TA)^{-1}A^Tb x=(ATA)?1ATb)、SVD分解
總結:
參考:知呼
-
LU需要矩陣A可逆,Cholesky是其特殊情況,Cholesky分解的時間復雜度是 m n 2 + ( 1 / 3 ) n 3 mn^2+(1/3)n^3 mn2+(1/3)n3
-
QR分解的時間復雜度是 2 m n 2 2 mn^2 2mn2 ,因為m>n,所以QR往往比Cholesky慢
-
在實際應用中,因為數值穩定性的要求 ,稠密矩陣往往用QR求解 ,對于大型的稀疏矩陣則多用Cholesky分解,
-
SVD分解,比QR分解慢,但是比QR分解穩定,
-
非齊次線性方程組Ax=b,什么時候有精確解,什么時候只有最小二乘解?
- 若矩陣A為列滿秩矩陣,
- 當A為方陣時,有精確解
- 當A為mxn的矩陣(m>n)時,方程個數大于未知數個數;這時候多出來的方程可能會與前面的方程矛盾,這時候沒有精確解,只有最小二乘解,所以不能直接用高斯消元等方法,只能用分解的方法找其主要特征,然后再正常求解,若多出來的方程與前面方程不矛盾,即多出來的方程都可以由前面的方程線性組合得到,這時候還是有精確解的,
- 若矩陣A為虧秩矩陣 | 即矩陣A獨立方程個數小于未知變數個數,這時候有無窮多個解,
- 此時也只有最小二乘解
- 若矩陣A為列滿秩矩陣,
-
TODO: 為什么要用QR分解來求解非齊次線性方程組Ax=b?
- A x = b ? Q R x = b ? R x = Q T b Ax=b \Rightarrow QRx=b \Rightarrow Rx=Q^Tb Ax=b?QRx=b?Rx=QTb 因為R是上三角矩陣,因此很容易求得方程組的解, Q T Q^T QT表示Q的轉置,由于R是三角形,因此方程組通過右側的簡單矩陣矢量乘法和向后替換來求解,
- QR分解數值穩定性較好,
-
TODO: 為什么要用SVD分解來求解非齊次線性方程組Ax=b?
-
為什么大多數解線性方程組用LU分解,而不用QR分解?因為QR分解時間復雜度較高,且LU分解容易并行,注意:SVD分解不容易并行看這里
-
TODO: 求解線性方程組Ax=b時,什么時候用QR分解,什么時候用SVD分解?
-
齊次線性方程組Ax=0的最小二乘解怎么求?
- 對 A 進行SVD分解后, A 的最小奇異值的右奇異向量就是方程組的一個解,
QR分解
注意:除特殊說明外,討論的矩陣均為實矩陣,
QR分解是一種正交三角分解,
-
定義 8.1.1 如果非奇異實矩陣 A 能夠表示為正交矩陣 Q 與上三角矩陣 R 的積,即
A = Q R (8.1.1) A=QR \tag{8.1.1} A=QR(8.1.1)
與 QR 分解類似,還有 RQ、QL, LQ 分解,其中 L 表示下三角矩陣,R表示上三角矩陣,矩陣的 QR 分解、 RQ 分解、 QL 分解、LQ 分解統稱為矩陣的正交三角分解,其它型別分解可通過類似 QR 分解的方法獲得, -
定理 8.1.1 對任意非奇異實矩陣 A 總可以分解為正交矩陣 Q 與上三角矩陣 R 的積,如果要求上三角陣 R 的對角元素均為正數,則分解是唯一的,
非奇異矩陣是行列式不為 0 的矩陣,也就是可逆矩陣,意思是n 階方陣 A 是非奇異方陣的充要條件是 A 為可逆矩陣,也即A的行列式不為零, 即矩陣(方陣)A可逆與矩陣A非奇異是等價的概念,——參考360百科
反之則是非奇異矩陣,
注意:只有方陣才有奇異矩陣和非奇異矩陣的說法,
-
定理 8.1.2 定理 8.1.1 可以推廣到非方陣的情形,對任意列滿秩的實矩陣 A 總可以分解為列正交的矩陣 Q 與上三角矩陣 R 的積, 如果
要求上三角陣 R 的對角元素均為正數,則這種分解是唯一的, -
上面用 Schmidt 正交化方法構造性地證明了非奇異矩陣總可以進行 QR 分解,但是在實踐中并不使用 Schmidt 正交化方法對矩陣作 QR 分解,而是利用實用的方法: Givens 方法或 Houesholder方法,
- Givens 旋轉方法,對于 n 階矩陣需要作 n(n-1)/2 個 Givens 旋轉矩陣的積,計算量較大,對于高階矩陣而言,用下述 Householder(反射)矩陣變換進行 QR 分解更有效,它只需要作(n-1)個 Householder 矩陣的積,其計算量大約是 Givens 旋轉方法的一半,
投影矩陣分解得到內外參
參考:《計算機視覺中的數學方法》——吳朝福 P182、知乎、Camera Calibration
RQ 分解是實作攝像機內引數、外引數求解的最為簡便的方法,令攝像機內引數矩陣為 K,外引數矩陣為 (R, t) ,由于此時的攝像機矩陣是歐氏的,所以可寫成下述形式:
P
=
α
K
[
R
,
t
]
=
[
α
K
R
,
α
K
t
]
P = αK[R, t] = [αKR, αKt]
P=αK[R,t]=[αKR,αKt]
將 P 表示成
P
=
[
H
,
p
4
]
P = [H, p_4]
P=[H,p4?] ,則有
H
=
α
K
R
p
4
=
α
K
t
H = αKR\\ p_4 = αKt
H=αKRp4?=αKt
其中,
p
4
p_4
p4? 表示P矩陣的第4列,對 H 作 RQ 分解:
H
=
K
^
R
^
H = \hat{K}\hat{R}
H=K^R^ ,其中
K
^
\hat{K}
K^ 是對角元均為正數的上三角矩陣,
R
^
\hat{R}
R^ 為正交矩陣,并且種分解是唯一的,三角矩陣
K
^
\hat{K}
K^ 與攝像機引數矩陣相差一個正常數倍,由于內引數矩陣最后一個元素為1,所以內引數矩陣必為:
K
=
K
^
33
?
1
K
^
K = \hat{K}_{33}^{-1}\hat{K}
K=K^33?1?K^ ,其中
K
^
33
\hat{K}_{33}
K^33? 是矩陣
K
^
\hat{K}
K^ 的第(3, 3)元素,最后得到的K有如下形式:
K
=
[
f
x
k
c
x
f
y
c
y
1
]
K = \begin{bmatrix} f_x & k & c_x \\ & f_y & c_y \\ & & 1 \end{bmatrix}
K=???fx??kfy??cx?cy?1????
其中
k
=
t
a
n
θ
k = tan\theta
k=tanθ ,
θ
\theta
θ 是影像軸之間的夾角,
如果正交矩陣
R
^
\hat{R}
R^ 是一個旋轉矩陣,則它就是攝像機關于世界坐標系的姿態,如果
R
^
\hat{R}
R^ 是不是旋轉矩陣,則表明所估計的攝像機矩陣與實際的(歐氏)攝像機矩陣反號,即 P 中的齊次子的符號
s
g
n
α
=
?
1
sgnα = ?1
sgnα=?1 ,于是
R
=
?
R
^
R = ?\hat{R}
R=?R^ 就是所要求解旋轉矩陣,對于平移引數 t,可通過下式來確定:
{
t
=
K
?
1
P
4
,
若
R
^
是
旋
轉
矩
陣
t
=
?
K
?
1
P
4
,
若
R
^
不
是
旋
轉
矩
陣
\left\{\begin{array}{l} t = K^{-1}P_4,若\hat{R}是旋轉矩陣\\ t = -K^{-1}P_4,若\hat{R}不是旋轉矩陣 \end{array}\right.
{t=K?1P4?,若R^是旋轉矩陣t=?K?1P4?,若R^不是旋轉矩陣?
這樣,就得到了攝像機內、外引數,
SVD分解
- 定理 8.3.2(奇異值分解, SVD) 設
A
∈
R
r
m
×
n
A \in R_{r}^{m \times n}
A∈Rrm×n? ,則存在 m 階正交矩陣 U 和 n 階正交矩陣 V 使
A = U [ Σ 0 0 0 ] V T A = U\begin{bmatrix} \Sigma & \mathbf{0} \\ \mathbf{0} & 0 \end{bmatrix}V^T A=U[Σ0?00?]VT
其中
Σ
=
d
i
a
g
(
σ
1
,
σ
2
,
.
.
.
,
σ
r
)
Σ = diag(σ_1,σ_2 ,...,σ_r)
Σ=diag(σ1?,σ2?,...,σr?) ,即
σ
1
,
σ
2
,
.
.
.
,
σ
r
σ_1,σ_2 ,...,σ_r
σ1?,σ2?,...,σr? 是 A 的非零奇異值,式(8.3.2)通常記為
A
=
U
D
V
T
A = UDV^T
A=UDVT
注意:奇異值分解既不要求矩陣 A 是可逆的方陣,也不要求它是方陣,
-
定理 8.3.4 設 A ∈ R r m × r A ∈ R_{r}^{m \times r} A∈Rrm×r? 的奇異值為 σ 1 ≥ σ 2 ≥ . . . ≥ σ r > σ r + 1 = . . . = σ n = 0 σ_1 ≥ σ_2 ≥ ... ≥ σ_r > σ_{r+1} = ... = σ_n = 0 σ1?≥σ2?≥...≥σr?>σr+1?=...=σn?=0 , ( A + Q ) ∈ R r m × r (A+Q) ∈ R_{r}^{m \times r} (A+Q)∈Rrm×r? 的奇異值為 τ 1 ≥ τ 2 ≥ . . . ≥ τ r > τ r + 1 = . . . = τ n = 0 τ_1 ≥ τ_2 ≥ ... ≥ τ_r > τ_{r+1} = ... = τ_n = 0 τ1?≥τ2?≥...≥τr?>τr+1?=...=τn?=0 ,則必有
∣ σ j ? τ j ∣ ≤ ∣ ∣ Q ∣ ∣ 2 ( j = 1 , 2 , . . . , n ) |σ_j ? τ_j| ≤ || Q ||_2 ( j = 1,2,...,n) ∣σj??τj?∣≤∣∣Q∣∣2?(j=1,2,...,n)
定理表明,矩陣 A 在攝動 Q 下,奇異值的變化量不超過 ∣ ∣ Q ∣ ∣ 2 || Q ||_2 ∣∣Q∣∣2? ,因此,矩陣奇異值的計算具有良好的數值穩定性質, -
奇異值分解還可以表示為
A = σ 1 u 1 v 1 T + σ 2 u 2 v 2 T + . . . + σ r u r v r T (8.3.8) A = σ_1u_1v_1^T + σ_2u_2v_2^T + ... + σ_ru_rv_r^T \tag{8.3.8} A=σ1?u1?v1T?+σ2?u2?v2T?+...+σr?ur?vrT?(8.3.8)
并且稱 u i u_i ui? 為奇異值 σ i σ_i σi? 的左奇異向量, v i v_i vi? 為奇異值 $σ_i $的右奇異向量,
順便一提:SVD的代碼實作中,可以選擇只計算U,也可以U和V一起計算,他們的時間復雜度是不一樣的,所以你可以根據自己的需求,選擇合適的方法,
最小二乘問題
考慮線性系統:
A
x
=
b
(
A
∈
R
m
×
n
(
m
>
n
)
,
b
∈
R
m
,
x
∈
R
n
)
(8.4.1)
Ax = b (A ∈ R^{m \times n} (m > n),b ∈ R^m, x ∈ R^n ) \tag{8.4.1}
Ax=b(A∈Rm×n(m>n),b∈Rm,x∈Rn)(8.4.1)
正常來看,這個方程是沒有解的的,但在數值計算領域,我們通常的是其最小二乘解,即求
x
∈
R
n
x ∈ R^n
x∈Rn 使得
∣
∣
A
x
?
b
∣
∣
2
=
m
i
n
{
∣
∣
A
v
?
b
∣
∣
2
:
v
∈
R
n
}
(8.4.2)
|| Ax-b ||_2 = min\{|| Av-b ||^2 : v \in R^n\} \tag{8.4.2}
∣∣Ax?b∣∣2?=min{∣∣Av?b∣∣2:v∈Rn}(8.4.2)
記
X
L
S
=
{
x
∈
R
n
:
x
是
(
8.4.1
)
的
解
}
X_{LS} = \{ x \in R^n : x 是(8.4.1)的解\}
XLS?={x∈Rn:x是(8.4.1)的解}
則稱
X
L
S
X_{LS}
XLS? 是最小二乘問題(8.4.1)的解集;
X
L
S
X_{LS}
XLS?中范數最小者稱為最小范數解,并記作
X
L
S
X_{LS}
XLS? ,即
∣
∣
x
L
S
∣
∣
2
=
m
i
n
{
∣
∣
x
∣
∣
2
:
x
∈
X
L
S
}
|| x_{LS} ||_2 = min\{|| x ||_2 : x \in X_{LS}\}
∣∣xLS?∣∣2?=min{∣∣x∣∣2?:x∈XLS?}
- 命題 8.4.1 x ∈ X L S ? A T ( A x ? b ) = 0 x \in X_{LS} ? A^T (Ax ? b) = 0 x∈XLS??AT(Ax?b)=0 ,其中,方程 A T ( A x ? b ) = 0 A^T (Ax ? b) = 0 AT(Ax?b)=0 稱為 A x ? b = 0 Ax ? b = 0 Ax?b=0 的正規方程,
根據命題 8.4.1,有下述推論:
- 推論 8.4.1: (1) X L S X_{LS} XLS? 是凸集; (2) x L S x_{LS} xLS? 是唯一的; (3) X L S = { x L S } X_{LS} = \{x_{LS}\} XLS?={xLS?} 的充分必要條件是 r a n k ( A ) = n rank(A) = n rank(A)=n ,
最小二乘問題的求解方法
(列)滿秩最小二乘問題
如果(8.4.1)中的矩陣 A 是列滿秩的,即 rank(A) = n ,則稱它為滿秩最小二乘問題,下面考慮滿秩最小二乘問題的數值演算法,
正規化方法
將求解問題(8.4.1)轉化為求解正規化方程組
A
T
A
x
=
A
T
b
(8.4.8)
A^TAx = A^Tb \tag{8.4.8}
ATAx=ATb(8.4.8)
由于 rank(A) = n ,所以
A
T
A
A^TA
ATA 是對稱正定矩陣,正定矩陣可逆,所以
x
L
S
=
(
A
T
A
)
?
1
A
T
b
x_{LS} = (A^TA)^{-1}A^Tb
xLS?=(ATA)?1ATb 但由于逆矩陣
(
A
T
A
)
?
1
(A^TA)^{-1}
(ATA)?1 不是特殊的矩陣,求解逆矩陣復雜度會很高,所以一般用其他方法,
因為 A T A A^TA ATA 是對稱正定矩陣,所以(8.4.8)的唯一解 x L S x_{LS} xLS? 還可以用 **Cholesky 分解法(它是LU分解的特殊情況)**求得,基本步驟為:
- 計算 C = A T A , d = A T b C = A^TA, d = A^Tb C=ATA,d=ATb ;
- 對 C 進行 Cholesky 分解 C = G G T C = GG^T C=GGT ;其中 G 為對角元素均大于零的上三角矩陣;
- 求解三角方程 G y = d Gy = d Gy=d 以及 G T x = y G^Tx = y GTx=y ,由于是上三角矩陣,后向迭代的高斯消元即可,
Cholesky 分解是LU分解的特殊情況,這種演算法的缺點很明顯:首先, A T A A^TA ATA有時候不可逆,不能得出結果,其次,即便可逆, A T A A^TA ATA數值穩定性不好,會造成誤差,
QR分解方法
正規化方法通常比較低效,下面介紹QR分解法,
設 A 有 QR 分解:
A
=
Q
m
×
m
[
R
n
×
n
0
]
m
×
n
=
Q
1
R
A = Q_{m \times m}\begin{bmatrix} R_{n \times n} \\ \mathbf{0} \end{bmatrix}_{m \times n} = Q_1R
A=Qm×m?[Rn×n?0?]m×n?=Q1?R
其中
Q
∈
R
m
×
m
Q \in R^{m×m}
Q∈Rm×m 是正交矩陣,
[
R
0
]
∈
R
m
×
n
\begin{bmatrix} R \\ \mathbf{0}\end{bmatrix} \in R^{m×n}
[R0?]∈Rm×n, Q1 是 Q 的前 n 列組成的矩陣,即
Q
=
(
Q
1
n
∣
Q
2
m
?
n
)
Q = ( \underset{n}{Q_1} | \underset{m-n}{Q_2} )
Q=(nQ1??∣m?nQ2??) ,
R
∈
R
n
×
n
R \in R^{n×n}
R∈Rn×n 是對角線上元素均為正數的上三角矩陣,
由于正交矩陣保持范數不變,所以問題 (8.4.1) 等價于
∣
∣
Q
T
(
A
x
?
b
)
∣
∣
2
=
m
i
n
{
∣
∣
Q
T
(
A
v
?
b
)
∣
∣
2
:
v
∈
R
n
}
||Q^T(Ax-b)||_2 = min\{||Q^T(Av-b)||_2:v\in R^n\}
∣∣QT(Ax?b)∣∣2?=min{∣∣QT(Av?b)∣∣2?:v∈Rn}
記
d
=
Q
T
b
=
[
Q
1
T
Q
2
T
]
b
=
[
d
1
d
2
]
d = Q^Tb = \begin{bmatrix} Q_1^T \\ Q_2^T \end{bmatrix}b = \begin{bmatrix} d_1 \\ d_2 \end{bmatrix}
d=QTb=[Q1T?Q2T??]b=[d1?d2??]
則有
∣
∣
Q
T
(
A
x
?
b
)
∣
∣
2
2
=
∣
∣
[
R
0
]
x
?
[
d
1
d
2
]
∣
∣
2
2
=
∣
∣
R
x
?
d
1
∣
∣
2
2
+
∣
∣
d
2
∣
∣
2
2
||Q^T(Ax-b)||_2^2 = || \begin{bmatrix} R \\ 0 \end{bmatrix} x- \begin{bmatrix} d_1 \\ d_2 \end{bmatrix} ||_2^2 = ||Rx-d_1||_2^2 + ||d_2||_2^2
∣∣QT(Ax?b)∣∣22?=∣∣[R0?]x?[d1?d2??]∣∣22?=∣∣Rx?d1?∣∣22?+∣∣d2?∣∣22?
因此, x 是 (8.4.1) 的解當且僅當 x 是方程
R
x
=
d
1
Rx=d_1
Rx=d1? 的解,這樣 (8.4.1) 的解可由上三角方程組
R
x
=
d
1
Rx=d_1
Rx=d1? 求得,
而上三角方程組用后向迭代的高斯消元是很好求的,
QR 分解方法的基本步驟如下:
- 求 A 的 QR 分解;
- 計算 d 1 = Q 1 T b d_1 = Q_{1}^{T}b d1?=Q1T?b ;
- 解方程組 R x = d 1 Rx = d_1 Rx=d1? ,
注意: QR 分解方法比正規化方法有較好的數值穩定性,并且計算結果比正規化方法要精確,當然, QR 方法比正規化方法會付出更大的計算代價,
SVD 分解方法
由于 rank(A) = n ,所以 A 必有下述形式的 SVD 分解
A
=
U
[
Σ
n
0
]
V
T
A = U\begin{bmatrix} \Sigma_n \\ \mathbf{0} \end{bmatrix}V^T
A=U[Σn?0?]VT
于是,A的廣義逆矩陣
A
+
=
V
[
Σ
n
?
1
,
0
]
U
T
A^+ = V[\Sigma_n^{-1}, \mathbf{0}]U^T
A+=V[Σn?1?,0]UT ,所以,問題(8.4.1)的解為
x
=
A
+
b
=
V
(
Σ
n
?
1
,
0
)
U
T
b
=
u
1
T
b
σ
1
v
1
+
u
2
T
b
σ
2
v
2
+
?
+
u
n
T
b
σ
n
v
n
=
∑
j
=
1
n
u
j
T
b
σ
j
v
j
(8.4.9)
x = A^+b = V(\Sigma_n^{-1}, 0)U^Tb = \frac{u_1^Tb}{\sigma_1}v_1 + \frac{u_2^Tb}{\sigma_2}v_2 + \dots + \frac{u_n^Tb}{\sigma_n}v_n = \sum_{j=1}^{n}\frac{u_j^Tb}{\sigma_j}v_j \tag{8.4.9}
x=A+b=V(Σn?1?,0)UTb=σ1?u1T?b?v1?+σ2?u2T?b?v2?+?+σn?unT?b?vn?=j=1∑n?σj?ujT?b?vj?(8.4.9)
上式給出了 SVD 分解方法關于最小二乘解的計算公式,
虧秩最小二乘問題
如果在最小二乘問題(8.4.1)中,矩陣 A 是虧秩的,即 r = rank(A) < n ,此時(8.4.1)有無窮多解,在上面介紹的處理滿秩問題(8.4.1)的正規化方法, QR 分解方法都將失敗,不能給出最小范數解
x
L
S
x_{LS}
xLS? ,但是 SVD 分解方法仍然有效,具體地說,若 rank(A) = r ,則 A 有 SVD 分解:
A
=
U
[
Σ
r
0
0
0
(
m
?
r
)
×
(
n
?
r
)
]
V
T
A = U\begin{bmatrix} \Sigma_r & \mathbf{0} \\ \mathbf{0} & \mathbf{0}_{(m-r)\times(n-r)} \end{bmatrix}V^T
A=U[Σr?0?00(m?r)×(n?r)??]VT
因此,
x
=
A
+
b
=
V
[
Σ
r
?
1
0
0
0
]
U
T
b
=
∑
j
=
1
r
u
j
T
b
σ
j
v
j
(8.4.10)
x = A^+b = V\begin{bmatrix} \Sigma_r^{-1} & \mathbf{0} \\ \mathbf{0} & 0 \end{bmatrix}U^Tb = \sum_{j=1}^{r}\frac{u_j^Tb}{\sigma_j}v_j \tag{8.4.10}
x=A+b=V[Σr?1?0?00?]UTb=j=1∑r?σj?ujT?b?vj?(8.4.10)
在這里, 可以看到 SVD 分解在數值計算中的作用,不論是滿秩的還是虧秩的最小二乘問題, SVD分解方法總能給出它們的求解計算公式,并且有統一的形式,
齊次最小二乘問題
對于齊次線性方程組 A x = 0 Ax=0 Ax=0 的最小二乘解,有一點不同,
考慮齊次線性方程組:
A
x
=
0
(
A
∈
R
m
×
n
(
m
>
n
)
,
x
∈
R
n
,
m
>
n
)
Ax = 0 (A ∈ R^{m×n} (m > n), x ∈ R^n ,m > n)
Ax=0(A∈Rm×n(m>n),x∈Rn,m>n)
對應的最小二乘問題是
∣
∣
A
x
∣
∣
2
=
m
i
n
{
∣
∣
A
v
∣
∣
2
:
v
∈
R
n
}
(8.4.13)
|| Ax ||_2 =min\{||Av||_2 : v \in R^n\} \tag{8.4.13}
∣∣Ax∣∣2?=min{∣∣Av∣∣2?:v∈Rn}(8.4.13)
顯然, x = 0 總是上述最小二乘問題的最小范數解,在實際中,人們所關心的并非是齊次最小二乘問題的零解,而是它的非零解,因此,我們總是考慮相應的約束最小二乘問題:(之所以取單位特征向量v,是因為若v是一個解,那乘以任意一個尺度s后還是方程的解)
∣
∣
A
x
∣
∣
2
=
m
i
n
{
∣
∣
A
v
∣
∣
2
:
v
∈
R
n
,
∣
∣
v
∣
∣
2
=
1
}
(8.4.13)
|| Ax ||_2 =min\{||Av||_2 : v \in R^n, ||v||_2=1\} \tag{8.4.13}
∣∣Ax∣∣2?=min{∣∣Av∣∣2?:v∈Rn,∣∣v∣∣2?=1}(8.4.13)
或者等價地寫成:
{
m
i
n
??
∣
∣
A
x
∣
∣
2
2
s
u
b
j
e
c
t
??
t
o
??
∣
∣
x
∣
∣
2
=
1
(8.4.15)
\left\{ \begin{aligned} & min \; ||Ax||_2^2 \\ & subject \; to \; ||x||_2 = 1 \end{aligned} \right. \tag{8.4.15}
{?min∣∣Ax∣∣22?subjectto∣∣x∣∣2?=1?(8.4.15)
-
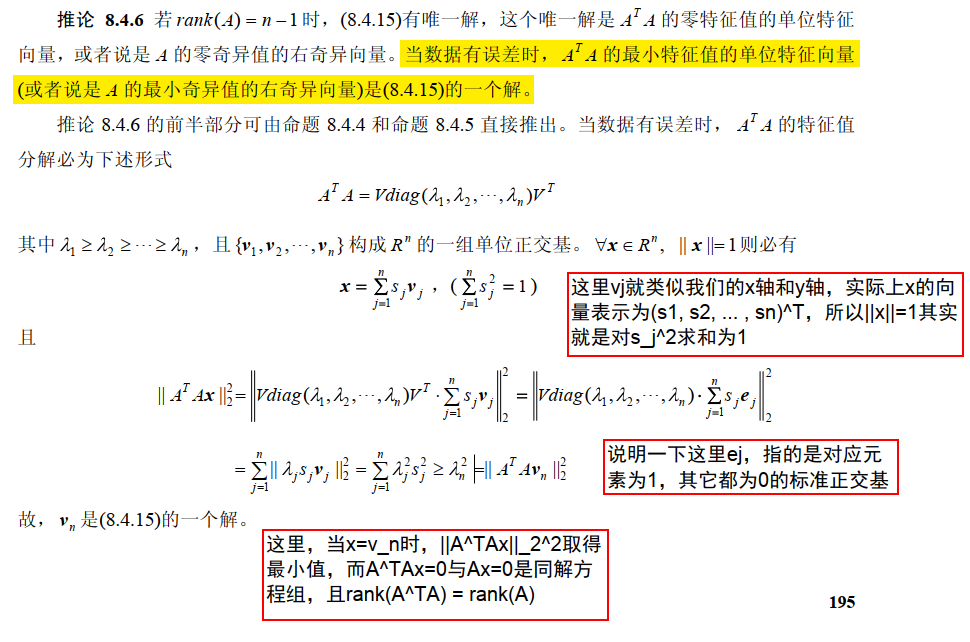
推論 8.4.6 若 rank(A) = n ?1 時, (8.4.15)有唯一解(rank(A)=n時齊次線性方程組只有零解),這個唯一解是 A T A A^TA ATA 的零特征值的單位特征向量,或者說是 A 的零奇異值的右奇異向量,當資料有誤差時, A T A A^TA ATA 的最小特征值的單位特征向量(或者說是 A 的最小奇異值的右奇異向量)是(8.4.15)的一個解(當資料無誤差時,最小特征值就是零),
個人證明一下,可能不嚴謹:
矩陣 A ∈ R r m × n ( m > n ) , x ∈ R n , m > n A ∈ R_r^{m×n} (m > n), x ∈ R^n ,m > n A∈Rrm×n?(m>n),x∈Rn,m>n .
一、若矩陣A的秩rank(A) = r ( r<n),對矩陣A進行SVD分解
A = U [ Σ r 0 0 0 ( m ? r ) × ( n ? r ) ] V T A = U\begin{bmatrix} \Sigma_r & \mathbf{0} \\ \mathbf{0} & \mathbf{0}_{(m-r)\times(n-r)} \end{bmatrix}V^T A=U[Σr?0?00(m?r)×(n?r)??]VT
其中正交矩陣 U m × m U_{m \times m} Um×m? 和 V n × n V_{n \times n} Vn×n? 的列向量分別為 u 1 , u 2 , . . . , u m u_1,u_2,...,u_m u1?,u2?,...,um? 和 v 1 , v 2 , . . . , v m v_1,v_2,...,v_m v1?,v2?,...,vm? ,則將SVD分解寫成向量的形式:
A = σ 1 u 1 v 1 T + σ 2 u 2 v 2 T + . . . + σ r u r v r T A = \sigma_1u_1v_1^T + \sigma_2u_2v_2^T + ... + \sigma_ru_rv_r^T A=σ1?u1?v1T?+σ2?u2?v2T?+...+σr?ur?vrT?
其中 σ i \sigma_i σi? 是矩陣A的奇異值,也是 Σ r \Sigma_r Σr? 對角線上元素,并且 σ 1 ≥ σ 2 ≥ . . . ≥ σ r ≥ 0 \sigma_1 \ge \sigma_2 \ge ... \ge \sigma_r \ge 0 σ1?≥σ2?≥...≥σr?≥0 ,則
∣ ∣ A x ∣ ∣ 2 2 = ∣ ∣ σ 1 u 1 v 1 T x + σ 2 u 2 v 2 T x + . . . + σ r u r v r T x ∣ ∣ 2 2 ||Ax||_2^2 = ||\sigma_1u_1v_1^Tx + \sigma_2u_2v_2^Tx + ... + \sigma_ru_rv_r^Tx||_2^2 ∣∣Ax∣∣22?=∣∣σ1?u1?v1T?x+σ2?u2?v2T?x+...+σr?ur?vrT?x∣∣22?
由于 V n × n V_{n \times n} Vn×n? 是正交矩陣,它的列向量都為單位向量并且相互正交(向量積為0),所以當取 x = v i , i > r , 滿 足 ∣ ∣ x ∣ ∣ 2 = 1 x = v_i, i \gt r, 滿足||x||_2 = 1 x=vi?,i>r,滿足∣∣x∣∣2?=1 時, v i v_i vi? 與 v 1 , v 2 , . . . , v r v_1,v_2,...,v_r v1?,v2?,...,vr? 都正交,向量積為0,所以 ∣ ∣ A x ∣ ∣ 2 2 = 0 ||Ax||_2^2 = 0 ∣∣Ax∣∣22?=0 , x = v i , i > r x = v_i, i \gt r x=vi?,i>r 是(8.4.15)的解(若rank(A)=n-1則這個解是唯一解,否則若rank(A)<n-1,則這個解只是其中的一個解,事實上,在帶約束的條件下,它所有的解就是所有0奇異值對應的右奇異向量),二、若矩陣A的秩rank(A) = n (列滿秩),對矩陣A進行SVD分解
A = U [ Σ n 0 ( m ? n ) × 1 ] V T A = U\begin{bmatrix} \Sigma_n \\ \mathbf{0}_{(m-n)\times1} \end{bmatrix}V^T A=U[Σn?0(m?n)×1??]VT
寫成向量的形式:
A = σ 1 u 1 v 1 T + σ 2 u 2 v 2 T + . . . + σ n u n v n T A = \sigma_1u_1v_1^T + \sigma_2u_2v_2^T + ... + \sigma_nu_nv_n^T A=σ1?u1?v1T?+σ2?u2?v2T?+...+σn?un?vnT?
當取 x = v n , 滿 足 ∣ ∣ x ∣ ∣ 2 = 1 x = v_n, 滿足||x||_2 = 1 x=vn?,滿足∣∣x∣∣2?=1 時, v n v_n vn? 與 v 1 , v 2 , . . . , v n ? 1 v_1,v_2,...,v_{n-1} v1?,v2?,...,vn?1? 都正交,向量積為0,而 v n , u n v_n,u_n vn?,un? 都是單位正交向量,有 v n T v n = 1 , ∣ ∣ u n ∣ ∣ 2 2 = 1 v_n^Tv_n = 1, ||u_n||_2^2 = 1 vnT?vn?=1,∣∣un?∣∣22?=1 ,所以 ∣ ∣ A x ∣ ∣ 2 2 = ∣ ∣ σ n u n ∣ ∣ 2 2 = σ n 2 ∣ ∣ u n ∣ ∣ 2 2 = σ n 2 ||Ax||_2^2 = ||\sigma_nu_n||_2^2 = \sigma_n^2||u_n||_2^2 = \sigma_n^2 ∣∣Ax∣∣22?=∣∣σn?un?∣∣22?=σn2?∣∣un?∣∣22?=σn2? ,而 σ n \sigma_n σn? 是所有奇異值中最小的,注意:這里沒有證明為什么 x = v n x = v_n x=vn? 是此時最小二乘解,只是說明了當取這個值時,似乎它能使得(8.4.15)在約束條件下最小,
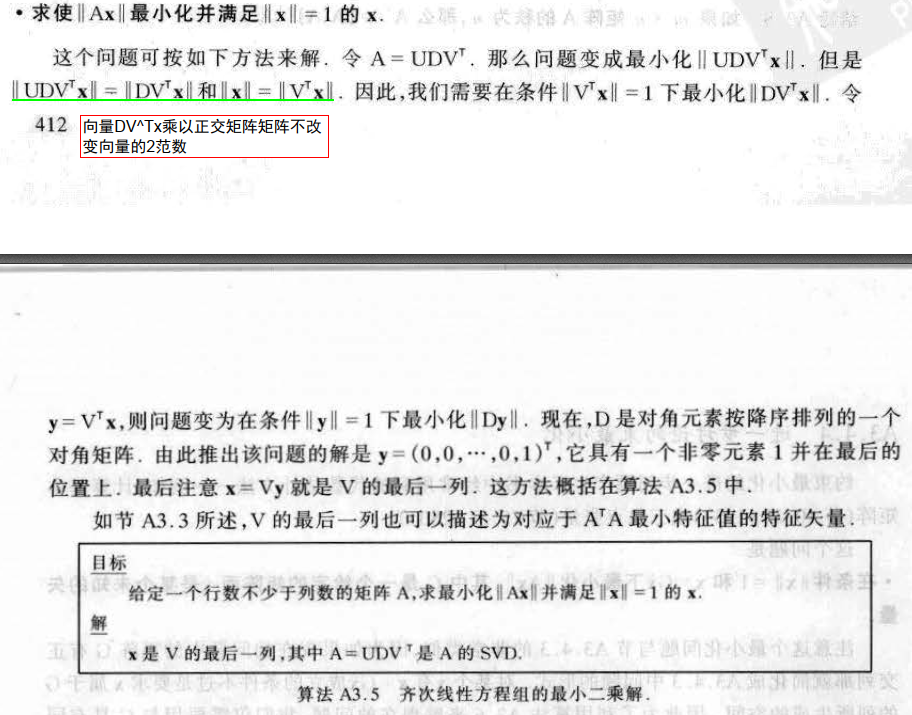
第二種情況還可以參考《計算機視覺中的數學方法》:
另外,看一下《計算機視覺中的多視圖幾何 第一版》,講得特別好,言簡意賅且容易理解:
數值穩定性問題
參考:視覺SLAM常見的QR分解SVD分解等矩陣分解方式求解滿秩和虧秩最小二乘問題(最全的方法分析總結)
為什么需要矩陣分解?
- 一方面,由于一些超定方程或欠定方程,沒有精確解,只能通過分解矩陣的方式求其最小二乘解;
- 另一方面,當資料量很大時,將一個矩陣分解為若干個矩陣的乘積可以大大降低存盤空間;
- 其次,可以減少真正進行問題處理時的計算量,畢竟演算法掃描的元素越少完成任務的速度越快,這個時候矩陣的分解是對資料的一個預處理;
- 再次,矩陣分解可以高效和有效的解決某些問題;
- 最后,矩陣分解可以提高演算法數值穩定性,關于這一點下面有進一步的說明,
當資料不存在誤差時,用一般的方法求解線性方程組即可;但是當我們得到的資料有誤差,或者由于計算機精度問題導致誤差時,一般的方法求解線性方程組往往會產生很大誤差,這里舉例說明,例如方程:
{
5
x
1
+
7
x
2
=
0.7
7
x
1
+
10
x
2
=
1
?
A
x
=
b
A
=
[
5
7
7
10
]
,
x
=
[
x
1
x
2
]
,
b
=
[
0.7
1
]
.
\left\{ \begin{aligned} & 5x_1 + 7x_2 = 0.7 \\ & 7x_1 + 10x_2 = 1 \end{aligned} \right. \Rightarrow Ax=b \\ A = \begin{bmatrix} 5 & 7 \\ 7 & 10 \end{bmatrix}, x = \begin{bmatrix} x_1 \\ x_2 \end{bmatrix}, b = \begin{bmatrix} 0.7 \\ 1 \end{bmatrix}.
{?5x1?+7x2?=0.77x1?+10x2?=1??Ax=bA=[57?710?],x=[x1?x2??],b=[0.71?].
直接對方程組求解可以得到:
x
=
[
0.0
0.1
]
x = \begin{bmatrix} 0.0 \\ 0.1 \end{bmatrix}
x=[0.00.1?]
現在對方程中的 b 進行一個微小擾動:
b
=
[
0.69
1.01
]
,
其
中
擾
動
項
為
[
?
0.01
0.01
]
b = \begin{bmatrix} 0.69 \\ 1.01 \end{bmatrix}, 其中擾動項為 \begin{bmatrix} -0.01 \\ 0.01 \end{bmatrix}
b=[0.691.01?],其中擾動項為[?0.010.01?]
擾動后,直接對方程組求解可以得到:
x
=
[
?
0.17
0.22
]
x = \begin{bmatrix} -0.17 \\ 0.22 \end{bmatrix}
x=[?0.170.22?]
結果變成了上式,可以看出當方程組中的常數矩陣發生微小的擾動時,會導致最終的結果發生較大的變化,這種結果的不穩定不是因為方程求解的方法,而是方程組矩陣本身的問題,這回給我們帶來很大的危害,例如像上面的情況,計算機求解出現舍入誤差,矩陣本身不好的話會直接導致結果失敗,
當對矩陣A或者b進行小擾動的時候,最后影響結果的是
∣
∣
A
∣
∣
?
∣
∣
A
?
1
∣
∣
||A|| \cdot ||A^{-1}||
∣∣A∣∣?∣∣A?1∣∣,與矩陣病態性成正相關,定義矩陣的條件數
c
o
n
d
(
A
)
=
∣
∣
A
∣
∣
?
∣
∣
A
?
1
∣
∣
cond(A)= ||A|| \cdot ||A^{-1}||
cond(A)=∣∣A∣∣?∣∣A?1∣∣ 來描述矩陣的病態程度,一般認為小于100的為良態,條件數在100到1000之間為中等程度的病態,條件數超過1000存在嚴重病態,以上面的矩陣A為例,采用2范數的條件數
c
o
n
d
(
A
)
=
222.9955
cond(A)=222.9955
cond(A)=222.9955 矩陣處于中等病態程度,
矩陣其實就是一個給定的線性變換,特征向量描述了這個線性變換的主要方向,而特征值描述了一個特征向量的長度在該線性變換下縮放的比例,對開篇的例子進一步觀察發現,A是個對稱正定矩陣,A的特征值分別為
λ
1
=
14.93303437
λ1=14.93303437
λ1=14.93303437 和
λ
2
=
0.06696563
λ2=0.06696563
λ2=0.06696563 ,兩個特征值在數量級上相差很大,這意味著b發生擾動時,向量x在這兩個特征向量方向上的移動距離是相差很大的——對于λ1對應的特征向量只需要微小的移動就可到達b的新值,而對于λ2,由于它比起λ1太小了,因此需要x做大幅度移動才能到達b的新值,于是悲劇就發生了.
Ax=0與Ax=b的選擇
對于有些問題比較靈活,既可以構建出Ax=0的方程組,也可以構建出Ax=b的方程組,那么該如何選擇呢?
根據我看到的,好像大都選擇構建成Ax=0的形式去解,我也不知道為什么,這里說一下我個人的看法,
解Ax=b需要求解A的SVD分解 A = U D V T A=UDV^T A=UDVT ,解Ax=0的最小二乘解,只需要用V的最后一列向量作為解即可,而SVD分解是可以講U、D和V分開求的,可以只求部分,只求部分時,時間復雜度會大大降低,所以Ax=0的一個優勢就是:不用求解完整的SVD,從而減少時間復雜度,(具體SVD的求法,可以自行搜索)
代碼實作
為了更好地理解本章的內容,下面給出兩個求解線性方程組的實戰代碼,
如果你不知道怎么運行下面代碼,可以點擊這里下載完整的工程,工程采用VS2015構建,
利用SVD求解非齊次線性方程組Ax=b
下面代碼僅依賴于eigen庫,在VS2015上除錯通過,
#include <iostream>
#include <ctime>
#include "Eigen/Dense"
using namespace std;
using namespace Eigen;
const int MOD = 100;
int main() {
// 構造輸入資料
uint32_t seed = time(0);
srand(seed); // 隨機初始化種子
MatrixXd A(3, 3);
// 當 A 是一個正常的可逆矩陣時,x的解應該是唯一的
A << rand() % MOD, rand() % MOD, rand() % MOD,
rand() % MOD, rand() % MOD, rand() % MOD,
rand() % MOD, rand() % MOD, rand() % MOD;
當 A 的秩為2時,Ax=b是一個欠定方程組,x的解有無數個,求解出來的可能與真值不同,但是Ax的結果仍然為b
注釋這一行去查看一下結果
//A << rand() % MOD, rand() % MOD, rand() % MOD,
// rand() % MOD, rand() % MOD, rand() % MOD,
// 0, 0, 0;
// TODO:當 A 為4x3矩陣時,Ax=b是一個超定方程組,只能求其最小二乘解
cout << "A: \n" << A << "\n\n";
MatrixXd x(3, 1);
x << rand() % MOD, rand() % MOD, rand() % MOD;
MatrixXd b = A*x;
// 求解方程 Ax=b,未知量為x
// 對系數矩陣A進行SVD,A = U*D*V^t
JacobiSVD<MatrixXd> svd(A, ComputeFullU | ComputeFullV); // SVD時不僅計算奇異值,還計算完整的U和V
MatrixXd U_inv = svd.matrixU().transpose(); //正交矩陣的逆就是它的轉置
MatrixXd V = svd.matrixV();
cout << "U_inv: \n" << U_inv << "\n\n";
cout << "V: \n" << V << "\n\n";
// 求對角矩陣的逆,注意由于有0奇異值,對角陣只對左上角非0子矩陣求逆,其他部分為0
MatrixXd d = svd.singularValues();
MatrixXd D_inv(3, 3);
for (int i = 0; i < d.size(); ++i) {
// 若奇異值大于0
if (d(i) > 1e-6)
D_inv(i, i) = 1.0/d(i);
else
break;
}
cout << "D_inv: \n" << D_inv << "\n\n";
// 求A的偽逆,A_inv = V*D_inv*U^t
MatrixXd A_inv = V * D_inv * U_inv;
// 求解x,并對比與真值是否相同,
// 當 A 的秩為2時,Ax=b是一個欠定方程組,x的解有無數個,求解出來的可能與真值不同,但是Ax的結果仍然為b
MatrixXd x_solve = A_inv * b;
cout << "x: \n" << x << "\n\n";
cout << "x_solve: \n" << x_solve << "\n\n";
// 對比b,b應該總是相同的
cout << "b: \n" << b << "\n\n";
cout << "A*x_solve: \n" << A*x_solve << "\n\n";
return 0;
}
利用SVD求解齊次線性方程組Ax=0
下面代碼僅依賴于eigen庫,在VS2015上除錯通過,
#include <iostream>
#include <ctime>
#include "Eigen/Dense"
using namespace std;
using namespace Eigen;
const int MOD = 100;
int main() {
// 構造輸入資料
uint32_t seed = time(0);
srand(seed); // 隨機初始化種子
MatrixXd A(3, 3);
當 A 是滿秩矩陣時,只有零解
//A << rand() % MOD, rand() % MOD, rand() % MOD,
// rand() % MOD, rand() % MOD, rand() % MOD,
// rand() % MOD, rand() % MOD, rand() % MOD;
// 當 A 是虧秩矩陣時,有非零解
// 注釋這一行去查看一下結果
A << rand() % MOD, rand() % MOD, rand() % MOD,
rand() % MOD, rand() % MOD, rand() % MOD,
0, 0, 0;
cout << "A: \n" << A << "\n\n";
// 求解方程 Ax=b,未知量為x
// 對系數矩陣A進行SVD,A = U*D*V^t
JacobiSVD<MatrixXd> svd(A, ComputeFullV); // SVD時不僅計算奇異值,還計算完整的V,不需要計算U,可以減少SVD的計算量
MatrixXd V = svd.matrixV();
cout << "V: \n" << V << "\n\n";
// 求解x,Ax=0方程組有無窮多解,V的最后一列列向量是一個非零解,且|x|=1
MatrixXd x_solve = V.col(V.cols()-1);
cout << "x_solve: \n" << x_solve << "\n\n";
// 當 A 是滿秩矩陣時,只有零解,沒有非零解,則A*x_solve 與 0 相差比較大
// 當 A 是虧秩矩陣時,有非零解,則 A*x_solve = 0
cout << "A*x_solve: \n" << A*x_solve << "\n\n";
return 0;
}
附錄——一些概念
- 齊次線性方程組:Ax=0
- 非齊次線性方程組:Ax=b
- 超定方程 | 超定方程組是指方程個數大于未知量個數的方程組,對于方程組Ra=y,R為n×m矩陣,如果R列滿秩,且n>m,則方程組沒有精確解,此時稱方程組為超定方程組,超定方程一般是不存在解的矛盾方程,解超定方程組非常普遍,比較常用的方法是最小二乘法,
- 欠定方程 | 方程個數小于未知量個數的方程組,
- 正交矩陣一定是方陣
參考資料
- 《計算機視覺中的數學方法》——吳朝福 | 本文主要參考資料
- 線性方程組的幾種求解方法
- 求解線性方程組解的方法?
- Solving linear equation systems | 列舉了用各種方法解線性方程組
- 百度百科——超定方程組
- 線性方程組求解 | 介紹了哪些線性方程組好解,后續的各種方法都是想辦法把方程組轉化為這些形式
- SVD分解為什么是最好的?QR分解和SVD比較?LU呢?SVD并行演算法可行么? - 知乎 | QR分解為什么能拿來求最小二乘,LU分解、QR分解、SVD分解的數值穩定性和時間復雜度
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/127605.html
標籤:其他
上一篇:計算機組成原理 干貨嘿嘿