基于STM32的485傳感器資料收集
**單片機型號**:STM32F103ZET6(適用其他F1系列的)
**傳感器**:超聲波模塊、DS18B20(溫度傳感器)、MQ-2(煙霧傳感器)
資料顯示:0.96OLED(IIC) 時鐘(DS1302)
**資料傳輸**:485傳輸 (類似串口通信)
**連接方式**: PC(USB介面)---(USB)USB轉485模塊(A,B)--接--(A,B)485轉TTL模塊 (RX,TX)--接--STM32(TX,RX)
**資料接收**: PC端串口助手接受資料(此處用的是野火的除錯助手)
(一)、傳感器介紹
1.超聲波模塊
(1) 圖片

(2)作業原理:
HC-SR04超聲波測距模塊可提供2cm-400cm的非接觸式距離感測功能, 測距精度可達高到3mm;模塊包括超聲波發射器、接收器與控制電路,
(1)采用IO口TRIG觸發測距,給至少10us的高電平信號;
(2)模塊自動發送8個40khz的方波,自動檢測是否有信號回傳;
(3)有信號回傳,通過IO口ECHO輸出一個高電平,高電平持續的時間就是超聲波從發射到回傳的時間,
(3)超聲波模塊連接(以下為本代碼中的樣例,IO口可以自行進行配置)
超聲波模塊引腳(HC-SR04):
------------------------------------ TRIG—GPIOC-PIN2----------------------------------------
------------------------------------ ECHO—GPIOA-PIN4--------------------------------------
(4)代碼
“shenbo.c”
#include "shenbo.h"
void TRIG_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;//觸發信號口初始化
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
GPIO_InitStruct.GPIO_Pin =GPIO_Pin_2; //選擇埠號(0~15或all)
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; //輸出觸發信號(10us)
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; //設定IO介面速度(2/10/50MHz)
GPIO_Init(GPIOC, &GPIO_InitStruct);
}
void ECHO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;//接識訓響信號口初始化
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStruct.GPIO_Pin =GPIO_Pin_4; //選擇埠號(0~15或all)
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING; //輸入浮空
//GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; //設定IO介面速度(2/10/50MHz)
GPIO_Init(GPIOA, &GPIO_InitStruct);
}
“shenbo.h”
#ifndef __RANGING_H
#define __RANGING_H
#include "stm32f10x.h"
void TRIG_Config(void);//初始化
void ECHO_Config(void);
#endif
“main”主要部分(計算距離)
GPIO_SetBits(GPIOC, GPIO_Pin_2); //給10us高電平
Delay_us(11);//最少10us觸發信號
GPIO_ResetBits(GPIOC, GPIO_Pin_2);//拉低電平
while(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_4)==0);//等待接受高電平
TIMER_ON(); //定時器開
while(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_4)==1);//等待接受低電平
TIMCounter = TIM_GetCounter(TIM6);//獲取計數器值
TIMER_OFF(); //定時器關
Dis = TIMCounter/58;//計算距離
void TIM6_IRQHandler(void)
{
if ( TIM_GetITStatus( TIM6, TIM_IT_Update) != RESET )
{
TIM_ClearITPendingBit(TIM6 , TIM_FLAG_Update);
}
}
2.DHT11(溫濕度傳感器)
本實驗采用的溫度傳感器模塊,如果用單個DS18B20模塊需要10K的上拉電阻,用于拉高總線,
(1)介紹及作業原理
單總線器件,支持多點組網功能,溫度范圍-55℃-+125℃,可編程的解析度為9-12,分別對應0.5℃,0.25℃,0.125℃和0.0625℃高精度測溫,
DQ端為數字輸入輸出端,開漏單總線引腳,不再需要外接AD電路轉換成數字信號,也就是能將溫度信號轉換成數字信號,通過與微控制器(STM32)IO口進行資料的傳輸讀取,
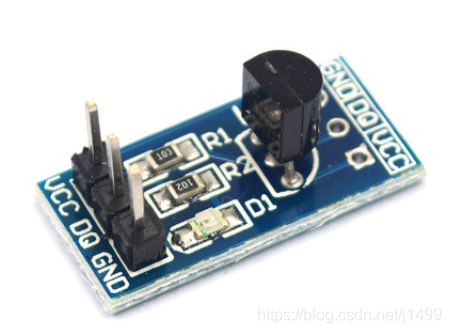
(2)連接方式(根據自己所需的IO口進行初始化等設定,本代碼中采用PB7)
----------------------------------DQ—GPIOB-PIN7-----------------------------------
(3)代碼
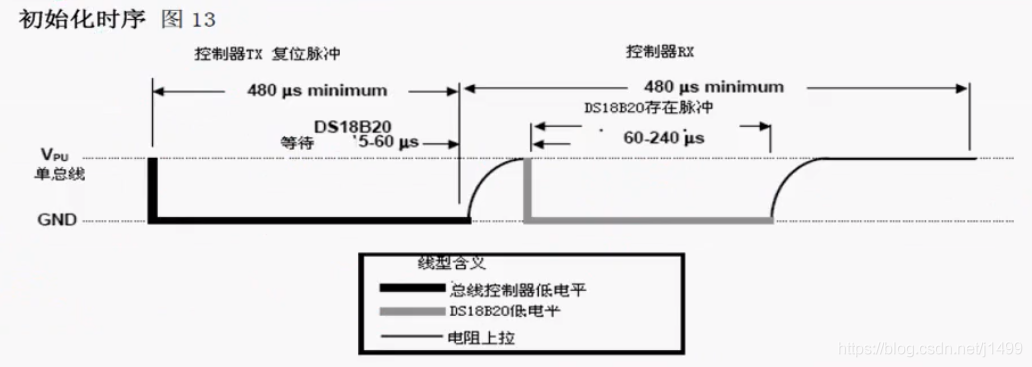
通過RAM指令表的約定代碼對相應指令進行讀取
嚴格按照時序圖進行相應的編程
分為初始化、讀時序、
“DS18B20.c”
#include "stdio.h"
#include "systick_delay.h"
#include "DS18B20.h"
#include "stm32f10x.h"
//配置成輸出模式
void DS18B20_Out(void)
{
GPIO_InitTypeDef GPIO_InitStructure;//------------------------------第一步:串口的GPIO初始化
// 打開DQ引腳的時鐘
DEBUG_DS18B20_APBxClkCmd(DEBUG_DS18B20_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = DEBUG_DS18B20_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;//
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(DEBUG_DS18B20_GPIO_PORT, &GPIO_InitStructure);//其中第一個是指標,第二個是名字所以需要&取地址
}
//配置成輸入模式
void DS18B20_Input(void)
{
GPIO_InitTypeDef GPIO_InitStructure;//------------------------------第一步:串口的GPIO初始化
// 打開DQ引腳的時鐘
DEBUG_DS18B20_APBxClkCmd(DEBUG_DS18B20_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = DEBUG_DS18B20_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//因為發送,推挽復用輸出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(DEBUG_DS18B20_GPIO_PORT, &GPIO_InitStructure);//其中第一個是指標,第二個是名字所以需要&取地址
}
void Ds18b20_Init()
{
uint8_t i=0;
/*配置成輸出模式*/
DS18B20_Out();
/*將電平拉到0*/
GPIO_ResetBits(GPIOB,GPIO_Pin_7);
/*延遲480us*/
Delay_us(480);
/*電平拉到1釋放總線*/
GPIO_SetBits(GPIOB,GPIO_Pin_7);
/*配置成輸入模式*/
DS18B20_Input();
/*等待復位信號 注意不能無限等待*/
while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_7)&&(i<200))
i++;
}
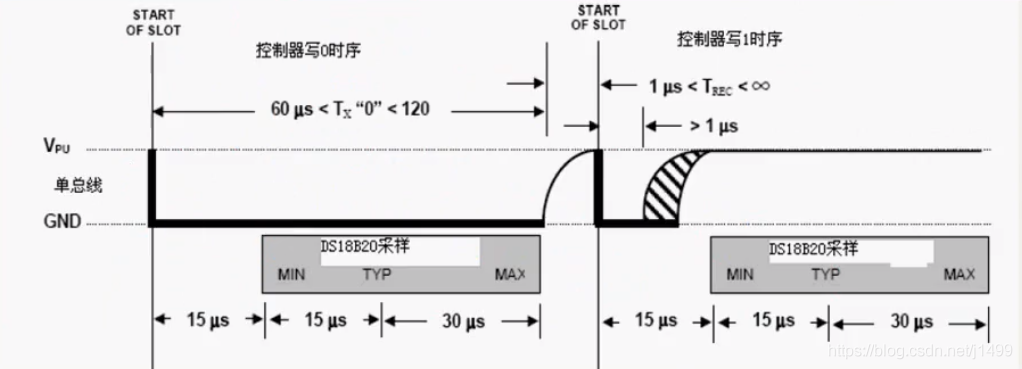
void Ds18b20WriteByte(uint8_t a)
{
uint8_t i=0;
uint8_t b=0x01;
uint8_t c=0;
/*設定IO口為輸出模式*/
DS18B20_Out();
for(i=0;i<8;i++)
{
c=b&a;
if(c)
{
/*拉低總線*/
GPIO_ResetBits(GPIOB,GPIO_Pin_7);
/*延遲15us產生寫時隙*/
Delay_us(15);
/*釋放總線*/
GPIO_SetBits(GPIOB,GPIO_Pin_7);
/*保持40us*/
Delay_us(40);
}
else
{
/*拉低總線*/
GPIO_ResetBits(GPIOB,GPIO_Pin_7);
/*至少保持60us低電平*/
Delay_us(60);
/*釋放總線*/
GPIO_SetBits(GPIOB,GPIO_Pin_7);
}
b=b<<1;
}
/*釋放總線*/
GPIO_SetBits(GPIOB,GPIO_Pin_7);
}
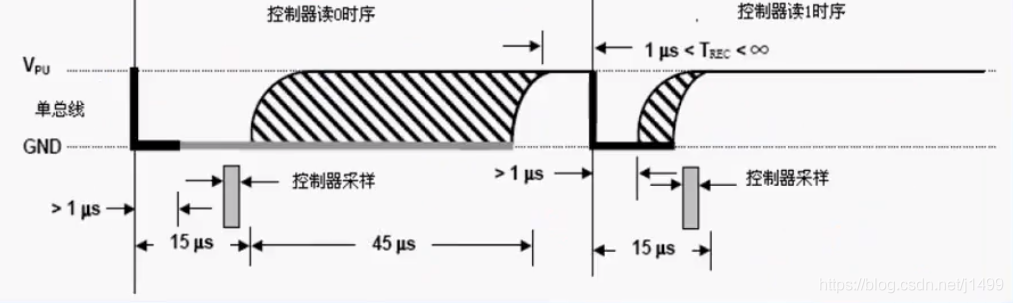
uchar Ds18b20ReadByte()
{
uint8_t a=0;
uint8_t i=0;
for(i=0;i<8;i++)
{
/*設定IO口為輸出模式*/
DS18B20_Out();
/*拉低總線*/
GPIO_ResetBits(GPIOB,GPIO_Pin_7);
/*延遲1us產生讀時隙*/
Delay_us(1);
/*釋放總線*/
GPIO_SetBits(GPIOB,GPIO_Pin_7);
/*設定IO口為浮空輸入模式*/
DS18B20_Input();
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_7))
{
a=a>>1;
a=a|0x80;
}
else
{
a=a>>1;
}
/*延遲50us保證時間要求*/
Delay_us(50);
/*設定IO口為輸出模式*/
DS18B20_Out();
/*釋放總線*/
GPIO_SetBits(GPIOB,GPIO_Pin_7);
}
return(a);
}
void Ds18b20ChangeTemp(){
Ds18b20_Init();
Delay_ms(1);
Ds18b20WriteByte(0xcc);//跳過ROM直接發送溫度轉換命令
Ds18b20WriteByte(0x44);//發送指令RAM設為0x44為溫度變換
}
void Ds18b20ReadTempCom(){
Ds18b20_Init();
Delay_ms(1);
Ds18b20WriteByte(0xcc);//跳過ROM直接發送溫度轉換命令
Ds18b20WriteByte(0xbe);//發送指令RAM設為0xBE為讀暫時暫存器
}
int Ds18b20ReadTemp(void){
int temp=0;
uchar tml,tmh;
Ds18b20ChangeTemp();
Ds18b20ReadTempCom();
tml=Ds18b20ReadByte();//讀低8位資料
tmh=Ds18b20ReadByte();//讀高8位資料
temp=tmh;
temp<<=8;
temp|=tml;//拼接為16位資料
return temp;//回傳16位資料
}
4.OLED顯示(0.96寸+IIC)
顯示超聲波測距、溫度、煙霧等引數,
(1)作業原理:IIIC控制
(2)連接方式:
------------------------------------ SCL—GPIOB-PIN13----------------------------------------
------------------------------------ SDA—GPIOA-PIN15----------------------------------------
(3)代碼:
DS1302時鐘模塊
為了取得定時效果,一共兩個方案,第一種通過STM32內部自帶的RTC進行時間定時,第二種就是通過DS1302時鐘模塊進行定時,通過資料的查找與實驗,在專案中使用RTC雖說時間誤差能減到很小但是所需晶振的精度和溫漂要求更高,操做不當對時間有很大的影響,而DS1302的精度高、時間的測量定時也更加的穩定,因此我們采用DS1302模塊,
心得:不同于51是通過準雙向口驅動該時鐘模塊,我們采用的STM32是雙向IO口進行讀寫設定,需要關注輸入輸出配置,所以我們在配置成開漏輸出模式的時候外接40k的上拉電阻避免讀出全是低電平的情況,
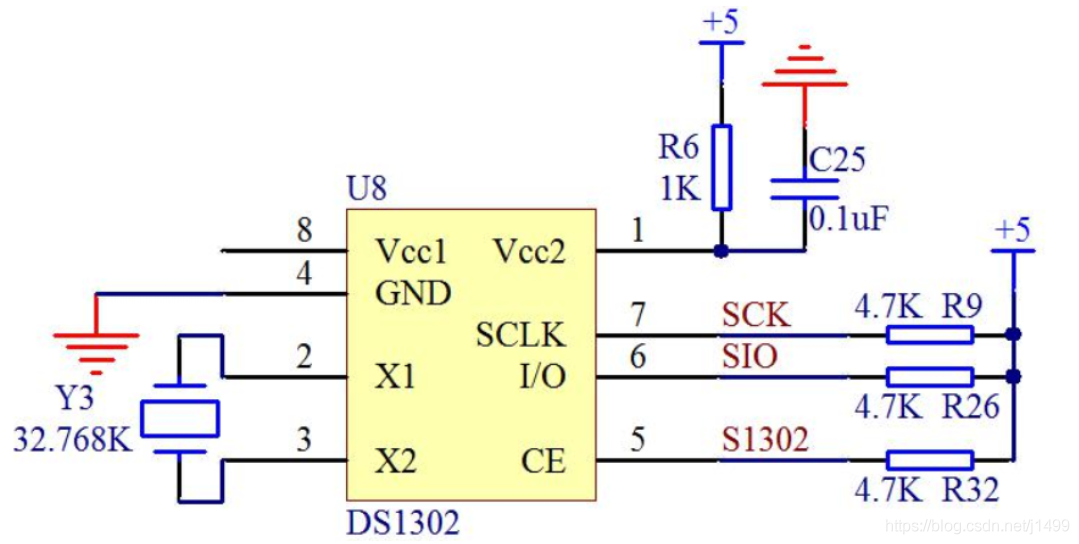
然后通過時序圖進行相應的編程
單位元組的讀寫—>整個資料的讀寫—>時間的讀寫
第一次寫博客,后續會繼續補完
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/142183.html
標籤:其他
上一篇:echarts實作組織結構圖
下一篇:物聯網平臺